1. Introduction
To keep an eye on objects (static or moving), a radar system is an alone equipment to investigate the characteristics of the object for position and velocity. The radar system broadcasts electromagnetic waves in the direction of the target and takes the wave echo by the target to observe the different parameters such as range, the velocity of the desired target. The present-day radar system exploits many aerial fundamentals to transmit and receive the echoes to increase the probability of target detection. In the addition phase, array radars broadcast entirely consistent waveforms (probably scaled with the help of a complex constant). These waveforms are produced from their ‘M’ dissimilar broadcast antenna fundamentals to form a powerful transmitted signal in the favored path. Formation of the beam is performed merely by the receiving antenna array to guess the parameters of the radar to estimate the current position of the target. Therefore the broadcast degrees of freedom are restricted to one and the receiver’s degrees of freedom are more than one (simply we can say ‘n’). But multiple input and multiple output radars transmit unstable signals, these signal waveforms are obtained from their dissimilar broadcasting aerial fundamentals and use combined processing of the acknowledged signals from the dissimilar receiver array fundamentals. Though phase array radars make use of the only spatial variety, multiple input and multiple output radars utilize together spatial and signal waveform variety to get better results of the performance of the system. MIMO radars can be extensively spaced or collocated antennas [
1,
2]. Whereas the former design enhances the selection of the target detection to get better results. This pattern of target detection improves the resolution of the target and intervention refusal ability. However, the signal waveforms for MIMO radars affect the range. Whereas the signal waveform for single input single output (SISO) radar is considered for desired Doppler and delay resolution properties. The signal waveforms selected for MIMO radars be supposed to have desirable uncertainty in the delay. The resolution characteristics of the broadcast signal waveforms are considered with the help of the uncertainty function [
3]. The uncertainty function of a broadcast signal waveform presents the matched filter output in the existence of Doppler and delay variance. If the delay (90 ms) and Doppler resolution are high (80–100 kHz), the uncertainty function is supposed to resemble a “thumbtack”. The idea of the uncertainty function is to complete the MIMO system proposed by Antonio and Robey [
4]. Chun and Vaidyanathan [
5] have proved the characteristics of multiple input uncertainties function and further extended the MIMO uncertainty function for frequency hopping signal waveforms. The Phase coded pulse waveforms are frequently used for radar applications because they are having a high bandwidth-time product (500–100). Numerous phase-coded signal waveforms are presented formerly [
6,
7,
8,
9] having better cross-correlation and autocorrelation properties. Such signal waveforms are intended for high-quality Doppler and delay resolution properties. On the other hand, manipulating the phase-coded signal waveforms by optimizing the MIMO uncertainty function modifies the Doppler, delay and also improves the spatial resolution characteristics.
The existing approaches in radar employ optimization algorithms with a huge number of iterations which may increase the delay, to obtain the codes with good auto or cross-correlation and mitigate the noise in the detection of static targets. Doppler tolerant digital codes are also implemented by the state of the art researchers to detect the moving targets. But these codes may not have good auto and cross-correlation properties. In this paper, an approach is presented in which various multi-criteria of digital codes have been generated with optimal auto and cross-correlation properties to mitigate the noise and the same code is tested for Doppler tolerance to detect static and multi moving targets by creating a huge number of clear windows within the threshold limit of radar detection. Each of the codes performs better for all three parameters; it is the optimization of all the three functions to efficiently detect the desired object. The binary sequences with different bit lengths in this approach are generated by using discrete mathematical operations to the digital sequence.
The rest of the paper is organized as follows. In
Section 2 we present the related work,
Section 3 presents our proposed approach, in
Section 4 discussion about the proposed approach is presented and the paper is concluded in
Section 5.
2. Related Work
Lewis and Kretschmer [
10,
11] presented two different approaches in which they recommended extra codes called P3 and P4 codes and are created from LFMWT. Moreover, these codes are used to improve the Doppler tolerance, in particular when compared to P1 and P2 codes. In addition peak side lobes of P3 and P4 codes are enhanced further to overcome the gaps that existed in polyphase codes. But the performance of these codes corrupts a smaller amount with an increase in Doppler frequency. Lewis [
12] proposed a method based on windowing mode to diminish the range versus time effects of side lobes in polyphase codes considerably. However, this technique simply decreases the peak sidelobe and an ingredient amount irrespective of the successful pulse compression ratio. Kretschmer and Welch [
13] projected a method in which they demonstrated that the autocorrelation function of polyphase codes is having undesired range side lobes. Hence cannot be suitable to detect multi-target detection. This approach also discussed the effect of Sidelobe reduction with the help of amplitude weighting function (AWF) of polyphase codes in the receiver filter. Even though weighed windows whenever used in source and destination (i.e., Transmitter and Receiver), provides improved results. In this approach author also proved that the weight on the sender (Receiver) is more ideal as the weight on destination (transmit) results in power loss because the existing source (transmitter) power cannot be entirely utilized. Luszczyk and Mucha [
14] proposed a model to reduce the effect of the range side lobe. In this approach, they used the Kaiser-Bessel weighing function of the p4 pulse compression signal waveform to reduce the range side lobes of P4. However, whenever a high Doppler occurs, the performance of this approach shows a poor response. Ajit Kumar Sahoo and Ganapati Panda [
15] anticipated a firmness windowing method to minimize the consequences of side lobes in Doppler tolerant radars. However, the presented technique experiences a delay and cannot produce bigger windows or enhance the count of windows to sense numerous moving objects correctly. Sharma and Rajeswari Rajeswari [
16] proposed a model to represent optimization for multiple input multiple output radar ambiguities. However due to huge mathematical complexity delay increases, also this approach has not had a large window so the probability of missing the target is more. Reddy and Anuradha [
17] presented an approach, to improve the Signal to noise ratio of Mesosphere- Stratosphere-Troposphere (MST) with the help of Kaiser hamming and cosh hamming window function. Also, this approach increases the energy of the main lobe to amplify the merit factor; however, this approach fails to remove the effect of side lobes. Because the Doppler change continuously. Therefore cannot be suitable to detect multiple moving targets. Lewis and Kretschmer [
18] proposed an approach in which they proved that one can use polyphase codes instead of using bi-phase codes, as the polyphase codes are also referred to compress the pulse of the given signal waveform to attain enhanced PSR and can be used to avoid the security problem. This method is very accurate to cause P1 and P2 polyphase codes. These polyphase codes are generated from the step estimation by the use of a modulation technique called linear frequency modulated waveform technique (LFMWT). Such polyphase codes have an additional tolerance to the restriction of the receiver side bandwidth
Sindhura et al. [
19] proposed a model, based on a wavelet, in this paper the authors compare the signal to noise ratio enhancement for Lower Atmospheric Signals. This approach is used to calculate the wind performance in the atmospheric boundary layer (ABL) and minor troposphere. SakhaWat et al. [
20] presented an approach in which the author gets the information of GPS signals and can be used to present a novel use to remote-sensing since they are capable of providing valuable information concerning the reflecting face. However, this technique puts much attention towards image arrangement that too of fixed (static) targets only, hence cannot have an optimal use in moving target detection. Syed and Venay [
21] projected a technique in which the main focus was to improve signal loss. Here they use p1, p3 codes, and hyperbolic frequency modulation (HFM) polyphase codes are used to increase the signal-to-noise ratio of the acknowledged signal. However, this approach has an adverse effect of delay, therefore not suitable to detect the multiple moving targets. Singh et al. [
22,
23] projected two different coding techniques to minimize the noise. No doubt the authors improved the count of the windows which can enhance the probability of target detection. However, these methods are limited to finding stationary and slow-moving objects only, since the period of the designed code vector is not as much of which minimizes the merit factor (MF) of the received echo signal and has noise in the region of the zero Doppler. In [
24,
25] two coding techniques have been presented to enhance the target detection in Doppler tolerant radar. Though, both techniques exploit the mathematical involvedness and maximize the delay parameter, which decreases the probability of target detection and could not be the optimum method to find -moving targets. Alotaibi [
26] presented a technique of target detection using linear block coding, in which the author generates the code using well-known (6,3) block code and then inserts the odd and even parity to change the present position of the code word to achieve the result. However the presented approach uses more number of gates to complement the existing code to increase the length of the codeword which increases the hardware and delay therefore, may not be optimum to detect multi-moving targets in Doppler tolerant radar. The digital code techniques [
24,
25,
26] are only concentrating on the Doppler but not on the auto and cross-correlation properties of the sequences which are considered to be important to detect the desired target in a multi-target environment. In [
27] the authors designed the digital sequences with optimal properties to detect the static and moving targets. But the side noise in this method is more when compared to the presented approach (refer to
Section 4 as comparative analysis of the existing approach and the proposed approach is depicted in the same section).
In this paper, an approach is being presented to optimize the interference to detect static and moving objects. The presented approach helps to detect multiple moving targets efficiently as the sequences obtained are tested for auto and cross-correlation along with the Doppler tolerant frequencies.
3. Proposed Approach
Initially, a concatenation series of decimal numbers having the equal number of zeros and ones when represented in hex code (i.e., from 0 to 15) are considered. This series is termed binary hex equal-weighted codes (BHEWC) and can be represented as
where ‘
’ is concatenation series of BHEWC.
The concatenation series then will be 3, 6, 9, and 12; the same series in binary hex value can be represented as ‘0011011010011100’. The MSB bit of the initially designed code is zero and it doesn’t satisfy the cyclic division rule (as the cyclic division process is used to generate the codes) so the hex value of the first decimal number is given one bit left shift (i.e., 0011 = 1001), and thus the concatenation series can now be represented as 1001011010011100. The remaining decimal numbers having equal weight (i.e., missed numbers in Equation (1)) can be formulated as
‘’ is the first decimal value of ‘’ and
‘’ is the last decimal value of ‘’
Now from Equations (2) and (3) M
B1 =
= 5 (Binary hex value 0101) and M
B2 = 2 × 5 = 10 (Binary hex value 1010) are the missing decimal numbers of ‘
’. Later cyclic redundancy method is used to improve the target detection and minimize the noise near-zero Doppler, in which the generator codeword can be represented by ‘
’ and the Radar codeword generation using cyclic process can be characterized as
where ‘
’ is the code after appending ‘
(q)’ or ‘
(q)’ zeros
where
is the hex code length of M
B1 or M
B2 (as they are of the same length).
Therefore, the length is 4 bits for both the cases, thus 4 − 1 = 3 zeros need to append to ‘
’ to get
codes that are employed in the cyclic process to get the initial radar codes to test the target. In this approach, modulo 2 additions are employed to generate the codeword. However, the code sequence that is exploited to generate the initial codeword to detect the targets in Doppler tolerant radar can be represented as
where ‘
’, ‘
’ are the remainders when ‘M
B1’ and ‘M
B2’ are the divisors of Equation (4) respectively, However as the MSB (most significant bit) of M
B1 is ‘0’, therefore to satisfy the cyclic process one bit left shift has given to ‘M
B1’. Hence the generated divisor can be represented as ‘1100’ and the two initial code words that are used to generate the final radar target detection code words can be represented in
Table 1 and
Table 2 respectively.
The final codeword matrix is formulated and can be represented in
Table 3 whose first row is ‘
’and first column is ‘
’
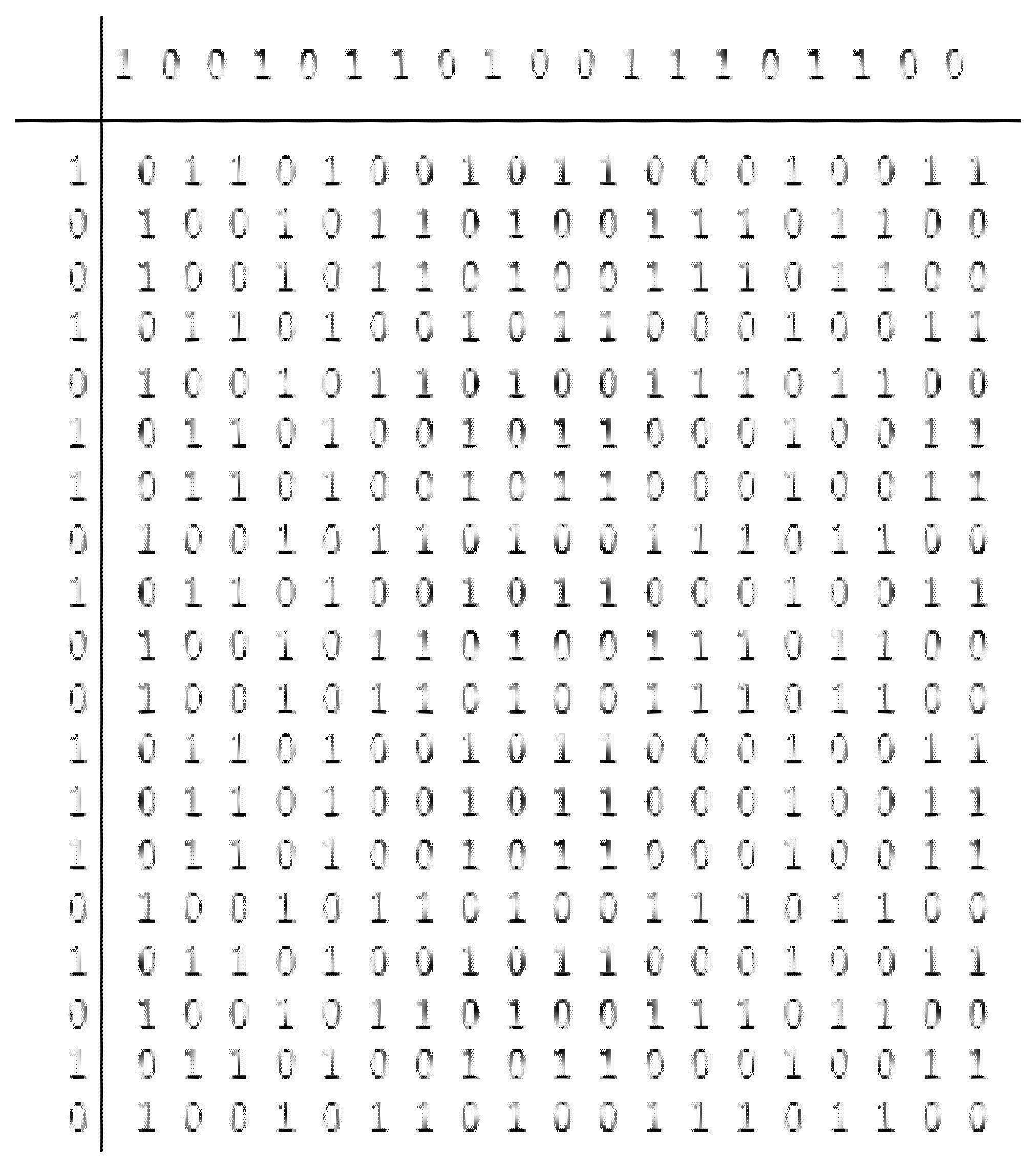
The remaining elements of the matrices are formulated by modulo two operations of row and Column and can be represented as
The matrix formed is represented in
Figure 1. From the figure, 19 × 19 matrix without considering the initial codes
(first row) and
(first column) is obtained.
To design the codes which are Doppler tolerant and with optimal autocorrelation and cross-correlation properties can be generated by performing various mathematical operations on the matrix such as
- a.
Concatenation of rows,
- b.
complement operation is performed on even terms,
- c.
if continuous series of three 1’s and 0’s occur in the sequence then the middle term is complemented and
The bits which are at the position of the sum of the power of 2 are complemented (i.e., multi-criteria creation of digital codes to test the target).
Note that one need not perform all the operations to obtain the sequence with good properties. The sequence obtained after performing each operation is tested and the sequence with the best properties (maybe after performing one operation, two operations, all the operations, or no operation) is selected.
Figure 2 shows the flow diagram of the proposed approach. The codes of different lengths (here 19-bit, 95-bit, and 190-bit codes) are generated from the above operations. The ambiguity, auto-correlation, and cross-correlation which are the optimal characteristic properties of static and moving target detection in a multi-target environment are observed using the mat-lab tool. For testing the sequence for auto and cross-correlation properties the 0’s of the sequence is replaced by −1 to obtain the actual length of the sequence and for the ambiguity function, this change is not necessary. The simulation parameters are shown in
Table 4.
The 19-bit code
and
are directly tested (without performing any mathematical operation) for the above properties and
shows better response, unlike
.
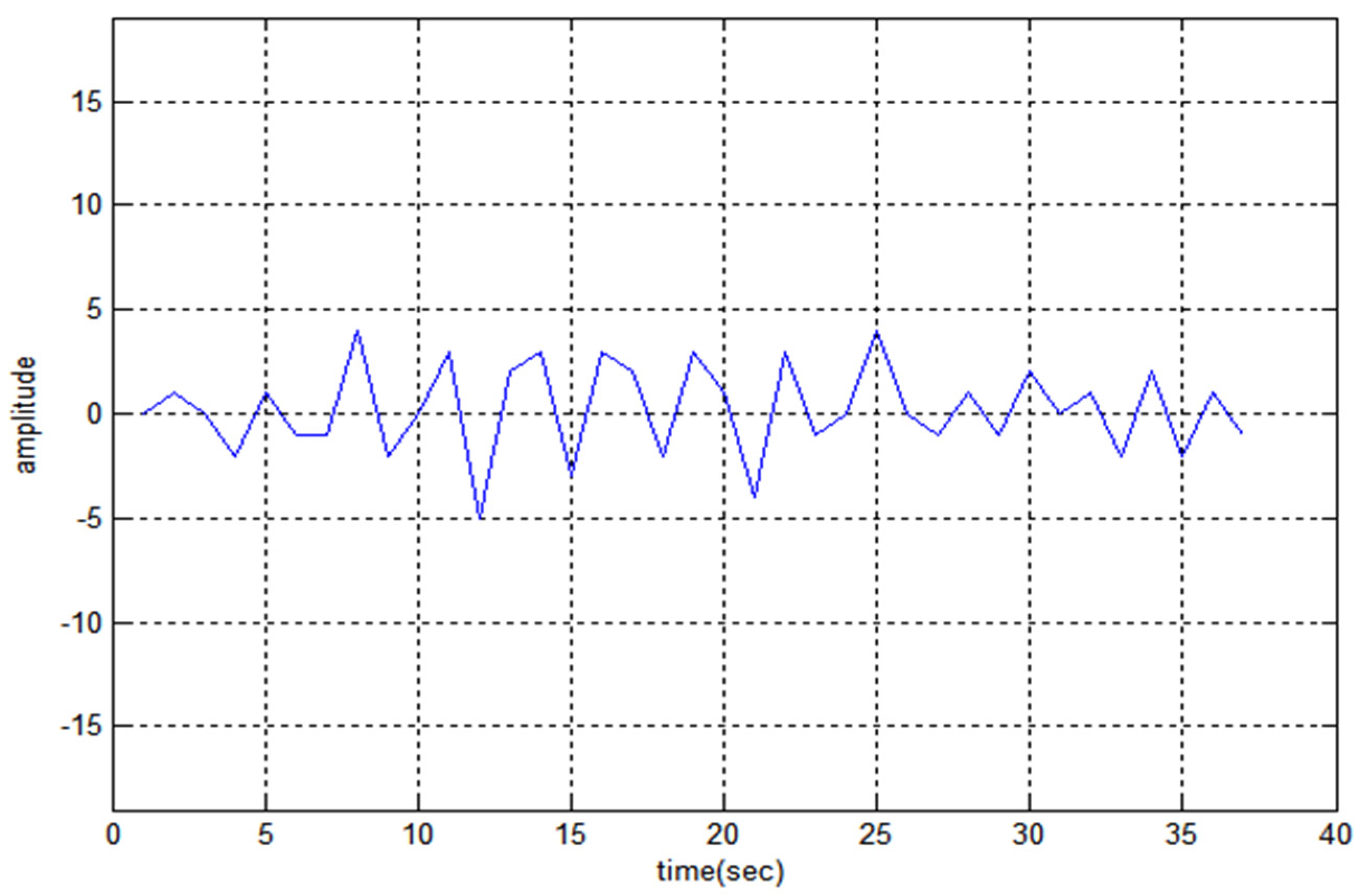
Figure 3,
Figure 4 and
Figure 5 depict the auto-correlation, cross-correlation, and Doppler tolerance of the code
.
From the graph, the side noise amplitude has the amplitude of 2 and the reduction ratio of peak to side-lobe
in dB can be calculated as [
27].
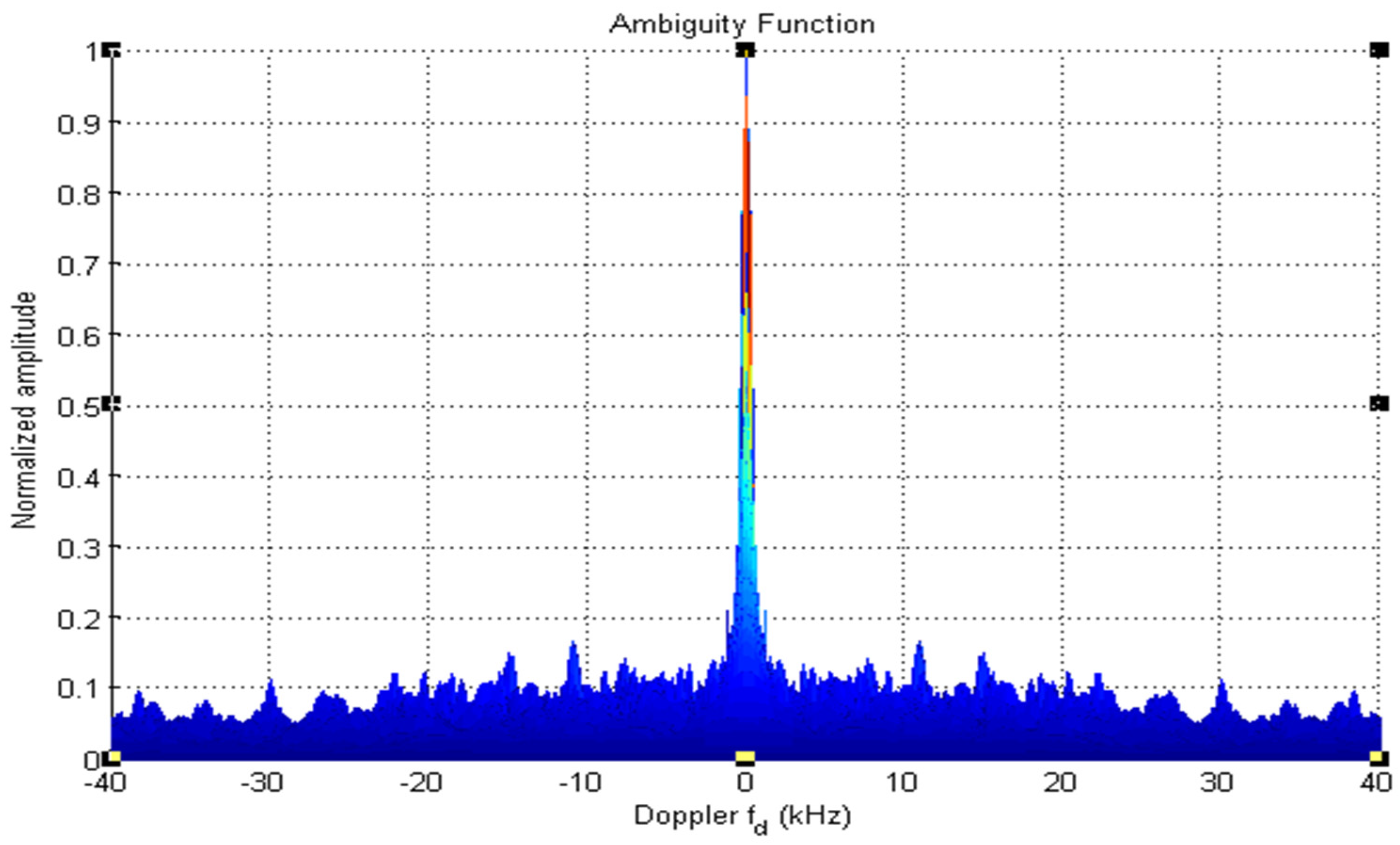
From
Figure 3 the maximum lobe for cross-correlation is 4, and
Figure 4 shows the ambiguity function of
code. It is observed that there are no clear windows below 0.2 (normalized amplitude which is considered as standard threshold value), the clear windows are present above 0.3 normalized value.
4. Generation of 95-Bit and 190-Bit Sequence
The 190-bit and 95-bit code is generated from the matrix of
Figure 1. Initially, the first row (
is eliminated to get the matrix of 19
20, however one can eliminate the first column (
) to get 20
19 and test the codes. The codes of length 190-bit and 95-bit are generated as represented in
Figure 6 and
Figure 7 respectively. The arrow in
Figure 6 represents the matrix division vertically into two parts termed the first half (
) and the second half (
) respectively to obtain the desired length of codes.
The sequence of 190-bit is obtained by concatenation of
(refer to
Figure 5). The mathematical operations performed on this 190-bit sequence respectively are (i) complementing even terms, (ii) complementing the middle bit if three continuous 0’s or 1’s occurs, and lastly (iii) complementing the bits present at the power of 2 positions. After performing all these operations the final code (F1) obtained can be represented as
The code obtained by concatenation of performs better than the codes obtained by concatenation of .
The sequence of 95-bit length is generated by horizontally dividing the first half (
) of the matrix equally as represented in
Figure 7. Let the two equal parts be
and
respectively.
Figure 8 shows the auto-correlation property of code F1 and the maximum noise lobe is 30 the
value is −16.03.
Figure 9 and
Figure 10 represent the cross-correlation and Doppler tolerance of sequence F1. The noise in
Figure 10 is below 0.2 (normalized amplitude) and after 24 kHz frequency, the noise is almost zero.
From
Figure 7 the generation of 95-bits is shown (concatenation of
and
), as the concatenation of
generates better properties than
. The 95-bit sequence (F2) tested in this paper is obtained by complementing the even terms of the code generated by concatenation of
.
Figure 11,
Figure 12 and
Figure 13 depict the auto-correlation, cross-correlation, and ambiguity of sequence F2. The value of
for F2 is −15.48. In
Figure 13 the noise amplitude is 0.2 at three frequencies and less than it for other frequencies with clear windows at 3–14 kHz, 16–21 kHz, and 24–38 kHz.
Figure 14 represents the noise peak (NP) versus the Doppler graph. It presents the comparative analysis of various existing approaches [
26,
27] with the proposed approach and it has been observed from the figure that the presented approach shows better performance with minimal side noise peaks when compared with the existing approaches as the presented approach obtained the digital codes with clear windows to detect the desired target in a multi-target environment.
Table 5 represents the length of the sequence and parameters achieved in terms of peak to side-lobe noise amplitude
in dB, cross-correlation noise amplitude, and clear windows at different Doppler’s.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}