4.1. Verification of Disdrometer Data
Disdrometer data were used as ground truth and to calibrate the
-
R relationship in Equation (
1). Hence, some verification in the TLPM dataset was necessary. A comparison between rainfall intensity values given by Equation (
2) and the ones returned by the TLPM (not reported here) highlights that the agreement is usually good. The velocity of raindrops measured by the TLPM has been compared with Maitra and Gibbins’ formula for the terminal velocity of raindrops [
34], which extrapolates the classic exponential model due to Atlas and Ulbrich to small particle sizes.
Figure 4 shows the 2D histogram of raindrop diameter and terminal velocity for a moderate event and an heavy rainfall event. The best fit from data are close to Maitra and Gibbins’ formula. The TLPM curve sits slightly above the model at small diameter values during the heavy rainfall event in
Figure 4b. Indeed, it has been shown that at high rainfall intensities, small raindrops may fall with larger velocities than would be expected from their diameters [
35]. Please note that the calculation of
in Equation (
5) needs raindrop velocity data. To that end, we used the values measured by TLPM. Particle counts corresponding to velocity values lying at least 30% below the Maitra and Gibbins curve or at least 200% above it were discarded.
Last, we compared DIS and RG rainfall estimates, specifically CAG and SPR data; the sensors are located 1.36 km apart and are at the same altitude. The scatterplot of 1 h rainfall depth for all the events in the database is shown in
Figure 5. The agreement is fairly good.
4.2. Optimization of k and Coefficients
The
-
R pairs calculated from 1 min TLPM data through Equations (
2) and (
5) were fitted to the power-law model in Equation (
1). The process was repeated for every event in the database and for every TLPM to check for any dependence of the
and
coefficients on the location or on the event. The results are reported in
Table 4. The specific attenuation
was calculated at 18.8 GHz with vertical polarization and assuming an horizontal path. The power-law fit exhibits CV values usually within 20% for the 15 different events. The Pearson correlation coefficient (not shown) is always larger than 0.90. The dependence on the location was quantified through the
indicator of Equation (
7) sampling the rainfall axis between 0.2 and 200 mm h
−1 (last column of the table). When three TLPM are available, a more general expression of Equation (
7) is used, considering three sets of
R values instead of two. The dependence of the
-
R relationship on the location is rather limited (
usually within
). Best fits at different frequencies in the Ka band (17–23 GHz) return similar numbers. Results in the Ku band (where only CML 10 operates) are slightly worse. Finally, power-law best fits from aggregation of TLPM data highlight differences from one event to another at small rainfall intensities.
is within 30% if restricted to the interval 5–200 mm h
−1.
Figure 6 shows the best fit power-law curve on log-log axes, putting together all the events and all the disdrometers (black line), and the ITU-R curve (red line) [
28]. The
-
R pairs derived from 1 min disdrometer counts are shown as well in three different colors. The RMSE and CV values of the best fit are 0.5 mm h
−1 and 20%, respectively. Best fits over individual TLPM (not shown) highlight small differences among them (
is less than 6%). On the other hand, there is a non-negligible departure from the ITU-R model. The latter returns smaller values of
R at given
values than the best fit based on local data. At 1 mm h
−1, the difference is 40%, at 10 mm h
−1 it is 20%, and it decreases below 10% beyond about 25 mm h
−1. In this work, we used the best fit relationship in
Figure 6 obtained from all the disdrometer data (same for all the events).
4.3. Comparison between CML and RG
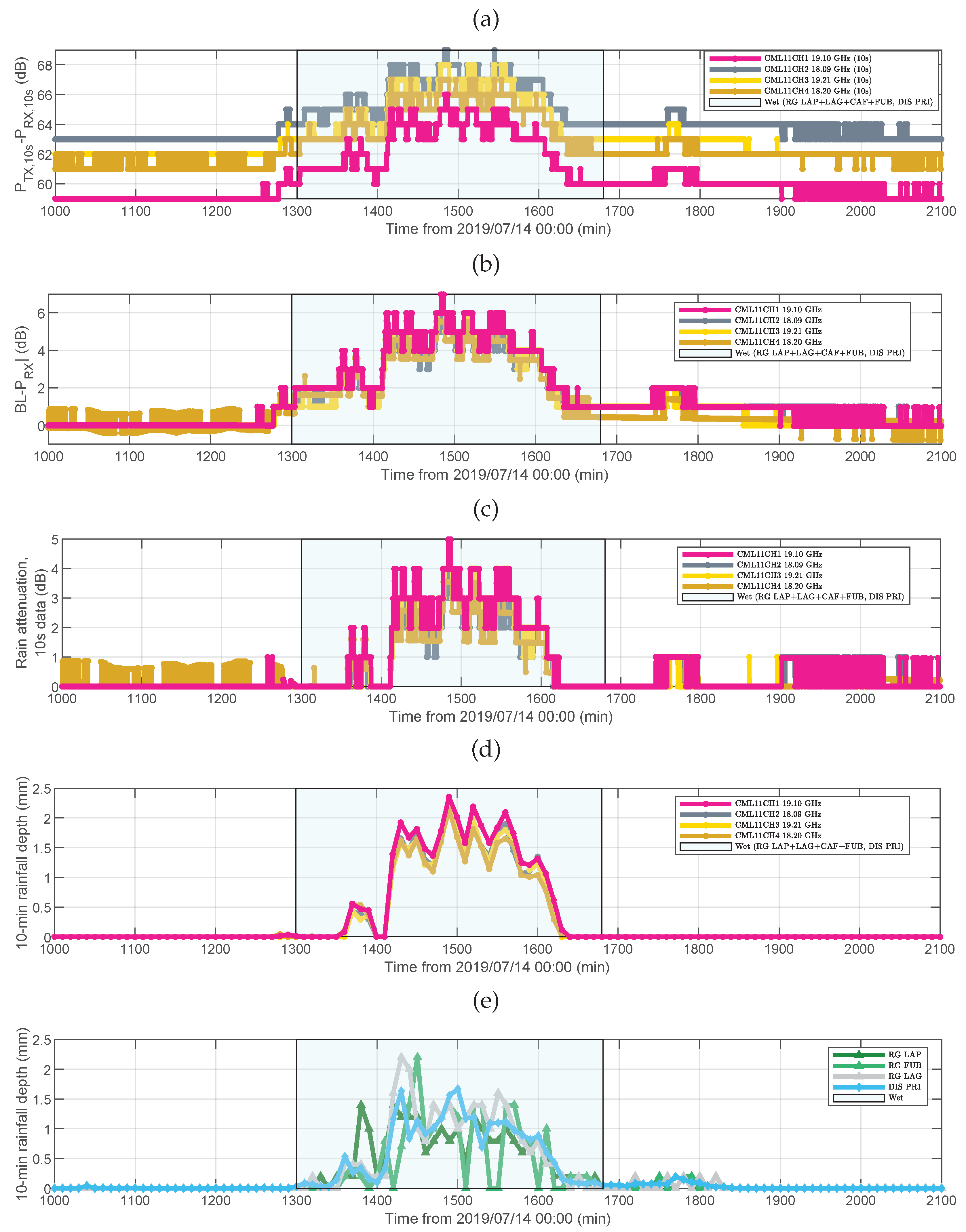
Figure 7 reports an example of the basic steps of CML data processing and the comparison with RG+DIS data for the moderate rainfall event of 14–15 July 2019. In
Figure 7a is the difference between TSL and RSL (i.e., raw data) for the four frequency channels of CML 11. In
Figure 7b is total signal attenuation in the presence of rain, which has been obtained as the difference between the baseline level (BL), i.e., the RSL in clear-sky conditions, and the current RSL value. In
Figure 7c is rain attenuation, i.e., the value in
Figure 7b after subtraction of the attenuation component due to wet antennas, and
Figure 7d shows the estimated rainfall depth. Non-zero values outside the time intervals identified as wet were dumped to zero. Finally
Figure 7e has the rainfall depth measured by the four rainfall sensors surrounding CML 11. Please note in
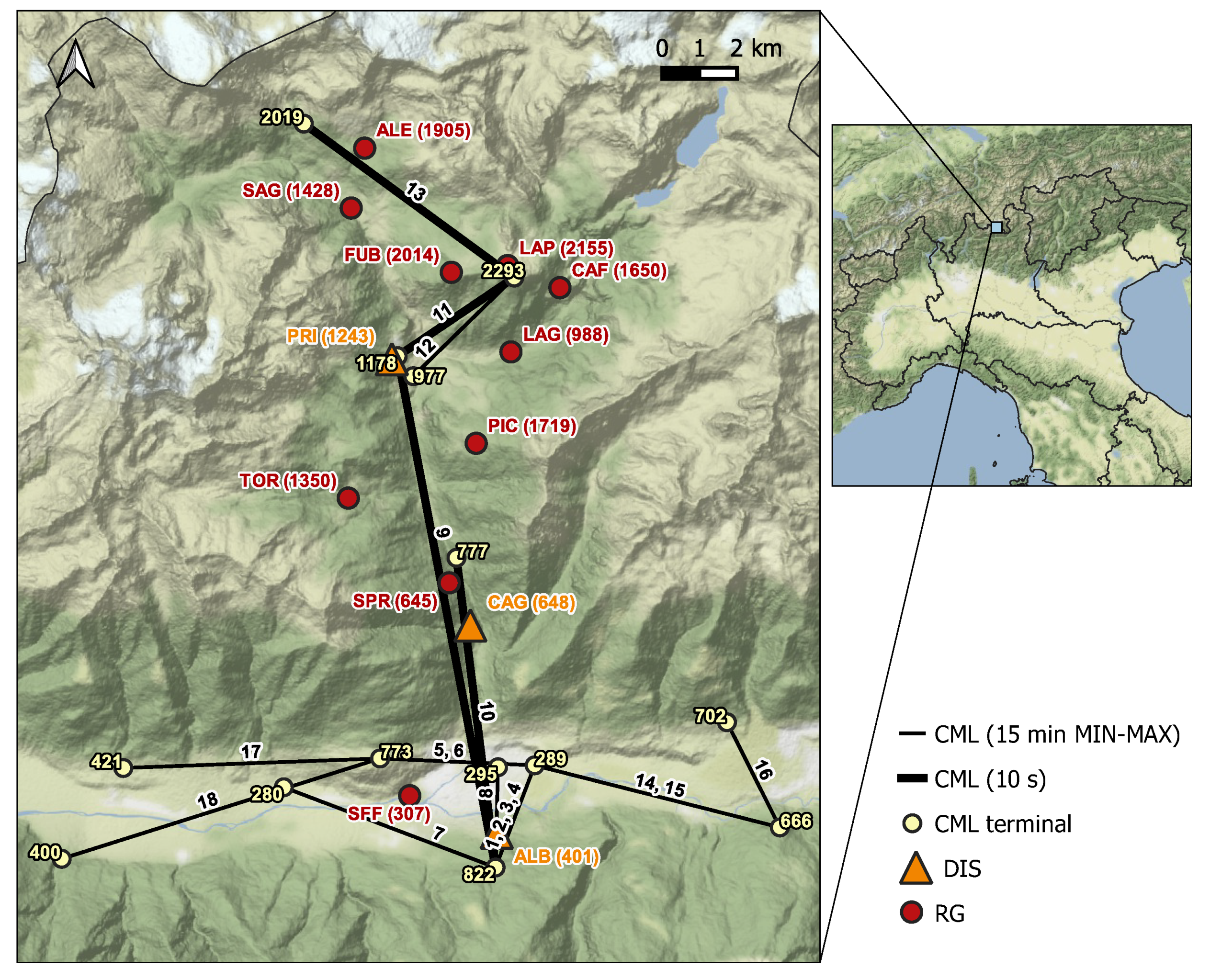
Figure 7a the difference in TSL-RSL among the channels even when it is not raining, that is, when the atmospheric attenuation across the channel is small. This means that such a difference is not only contributed by the propagation channel but also by the system itself (e.g., transmitting and receiving chain). When the RSL is subtracted from the BL, the four time series tend to overlap. The propagation path of CML 11 runs through the Valmalenco valley from SW to NE. There are two sensors (PRI and LAP) close to its terminals, while FUB and LAG are located midway through the path, on the mountain chests surrounding the valley. The time series obtained from CML data look very correlated with the occurrence of rain as detected by RG+DIS.
Figure 7a,b shows that the RSL starts dropping (i.e., attenuation increases) when the RG+DIS detect rain, and the RSL returns to the initial level much after rain has ceased. This additional loss is much likely due to wet antennas. A wet antenna loss up to about 2 dB is visible during the initial transient.
Let us now assess the performance of CML as rainfall sensors over the entire dataset of events listed in previous
Table 3. Rainfall occurrence and rainfall depth were evaluated over 10 min time intervals, i.e., the shortest available integration time, which is lower bounded by the RG dataset. The following
Table 5 shows the occurrences of rain during the observation period, i.e., the number of 10 min slots flagged as wet according to the RG+DIS associated with every CML (column 3). The percentage of wet slots goes from 15 to 23% of the valid slots. After filtering out the wet slots corresponding to rainfall intensities less than
(see
Section 3.4), a majority of samples were discarded in the cases of CML 10, 11, and 13, along with most of them in the case of the 14 km link transmitting at Ku band. If we further discard highly inhomogeneous rainfall conditions setting a 0.5 threshold on the indicator
in Equation (
9), the population is drastically reduced. Indeed, rainfall in Valmalenco valley is very often patchy, especially in the Northern part of it, where orographic effects are important. Moreover, the paths of both CML 11 and 13 run between two mountain chests surrounding the valley, hence amplifying the above effects.
The contingency table shown as a barplot graph in
Figure 8 is an indicator of how dry/wet slot classification based on CML data is good as compared with the classification based on RG+DIS.
Figure 8a considers all the valid data (column 2 of
Table 5), whereas in
Figure 8b, only data corresponding to rainfall values above
are retained, according to the procedure outlined in
Section 3.4. True positives in the figure are wet slots as identified by both the CML-based algorithm and the associated RG+DIS. Results in
Figure 8b are good: the sensitivity, i.e., the ability to correctly identify wet slots, is above 90%. The specificity, i.e., the ability to reject false negatives (i.e., dry slots), is close to 100% everywhere due to the filtering process.
Figure 9 shows the scatterplots of 10 min rainfall depth gathered from individual CML against the average of the RG+DIS set associated to each CML, calculated as in
Section 3.4. The data points drawn in the figure include all the wet slots (column 3 of
Table 5). On the other hand, best fits were obtained only from the data points above
(column 4 of
Table 5). The scatterplots highlight different patterns. CML 9 and 10 underestimate the rainfall depth with respect to RG+DIS. CML 9 is the longest link in the area; hence, the probability of inhomogeneous rainfall across its path is rather high. Even though the procedure proposed in
Section 3.4 produces a RG+DIS-based rainfall estimate that approximates a path-averaged measurement, the few sensors available (six across a 14 km path) and their position (only three of them are within 1 km of its path) may explain the above discrepancy. CML 10 and 13 are shorter (8.4 and 7.0 km, respectively) and rather well covered by rainfall sensors (four and five, respectively). Even though for CML 13, the values of
indicate the presence of patchy rainfall most of the time, there is very good agreement with RG+DIS. In the case of CML 10, there are fairly uniform rain conditions along the path during 141 time slots (that is about 24 rainy hours). However, if we restrict the best fit only to the above data, there is not a significant increase in the slope of the best fit line. This circumstance may suggest that the algorithm of rainfall depth estimate over a path based on RG+DIS works fairly well. CML 11 shows a very large overestimate, which is not easy to justify. The overestimate is rather independent of the rainfall depth; i.e., the coefficients of the best fit are similar when we select only specific rainfall depth intervals.
There are a few reasons that may explain the above discrepancies. First of all, it is known that rainfall exhibits very irregular patterns (both in time and in space) in a mountain climate. More accurate results would be probably achieved by using the
R-
best fits on an event basis, rather than an average relationship. Moreover, the algorithm for CML validation by RG+DIS in
Section 3.4 could be improved by correcting RG and DIS measurements with the altitude to account for the vertical structure of rainfall. On the other hand, spatially inhomogeneous precipitation is not expected to produce large errors in the estimate of the average rainfall depth obtained by inversion of the non-linear Equation (
1), at least in the frequency bands of the CML in Valmalenco (Ka and Ku bands), as the exponent
of the power-law best fit is very close to 1. We simulated this effect using simple patterns of uniform rainfall along a fraction of the link path and no-rainfall elsewhere. We got negligible differences between the average rainfall intensity over the path and the estimated average from inversion of Equation (
1). Wet antenna attenuation was estimated by inspection of the RSL patterns, as shown in the example in
Figure 7, rather than by a well-settled procedure, and we did not attempt to discriminate cases where only one of the terminals was affected. A bias in the estimate of wet antenna attenuation would affect rainfall intensity. In fact, by elemental mathematics, we get
where
is a (constant) error on the estimate of attenuation
and
is the estimated rainfall intensity. Equation (
10) holds in case
. For instance, with
at 18.80 GHz,
dB and
dB, we get
. The percent difference between
and
R decreases if
A (i.e.,
R) increases. Finally, we can not rule out issues due to the CML network, such as errors or biases in power measurements, errors in RSL encoding (e.g., the available RSL value may differ from the instantaneous or quasi-instantaneous signal level), or again, errors on the metadata provided by the mobile company (e.g., the actual operational frequency of CML).


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}