
Near Ground Pathloss Propagation Model Using Adaptive Neuro Fuzzy Inference System for Wireless Sensor Network Communication in Forest, Jungle and Open Dirt Road Environments

 , ,
, ,
Abstract
:1. Introduction
- Build the WSN node for the measurement experiment (LoRa radio transceiver).
- Measure the radio signal strength at jungle, forest, and open dirt road environments.
- Input those measurements into the designed ANFIS engine as the data training input.
- Build a new semi deterministic pathloss propagation model that is more accurate for jungle, forest, and open dirt road environments.
- Validate the model using RMSE and MAE against benchmark models.
2. Models, Materials, and Methods
2.1. Related Pathloss Propagation Models
2.1.1. Okumura-Hata Model
- = Pathloss propagation model created by Okumura Hata.
- = Frequency carrier in MHz.
- ht = Antenna transmitter height in meters.hr = Antenna receiver height in meters.
- = Distance between transmitter and receiver in Km.
2.1.2. Optimized FITU-R Model for Near Ground Forest (Optimized FITU-R NGF) Model
- = Pathloss propagation using FITU-R model.
- = Frequency carrier in GHz.
- ht = Antenna transmitter height in meters.
- hr = Antenna receiver height in meters.= Distance between transmitter and receiver in meters.
- A, B, C = Least squared error fit from measured data, which is 0.48, 0.43, 0.13.
2.1.3. ITU-R Maximum Attenuation and Free Space Pathloss (ITU-R MA FSPL) Model
- = Maximum excess attenuation in dB; in Salameh result was 38.
- R = R is the initial slope of the attenuation curve; in Salameh result was 0.9 db/m.
- = Distance between transmitter and receiver in Km.
- = Frequency carrier in MHz.
2.2. Measurement Equipment
2.3. Measurement Environment
2.4. Adaptive Neuro Fuzzy Inference System Method
- i = every node in Fuzzy ANFIS architecture.
- x = is the input to node i.
- A, B = is the linguistic label (such as small, large, etc.).
- = is the parameter set.
- = is the firing strength of node.
- = is the normalized firing strength of node.
- = is the parameter set.
- = is error measure which is the sum of squared errors.
- = is m component from P output target vector.
- = is m component from actual output vector that has been produced by P input vector.
- S = shows the set of nodes whose output depends on α.
- η = is a learning rate.
- k = is the step size of length of each gradient transition in the parametric space.
- = Input variable such as frequency, bandwidth, spreading factor, range, and others.
- a = Defines the width of the membership function input.
- = Defines the shape of the curve on either side of the midland.
- = Defines the center point of the membership function.
- = Constant Output Level generated automatically by ANFIS.
3. Results and Discussion
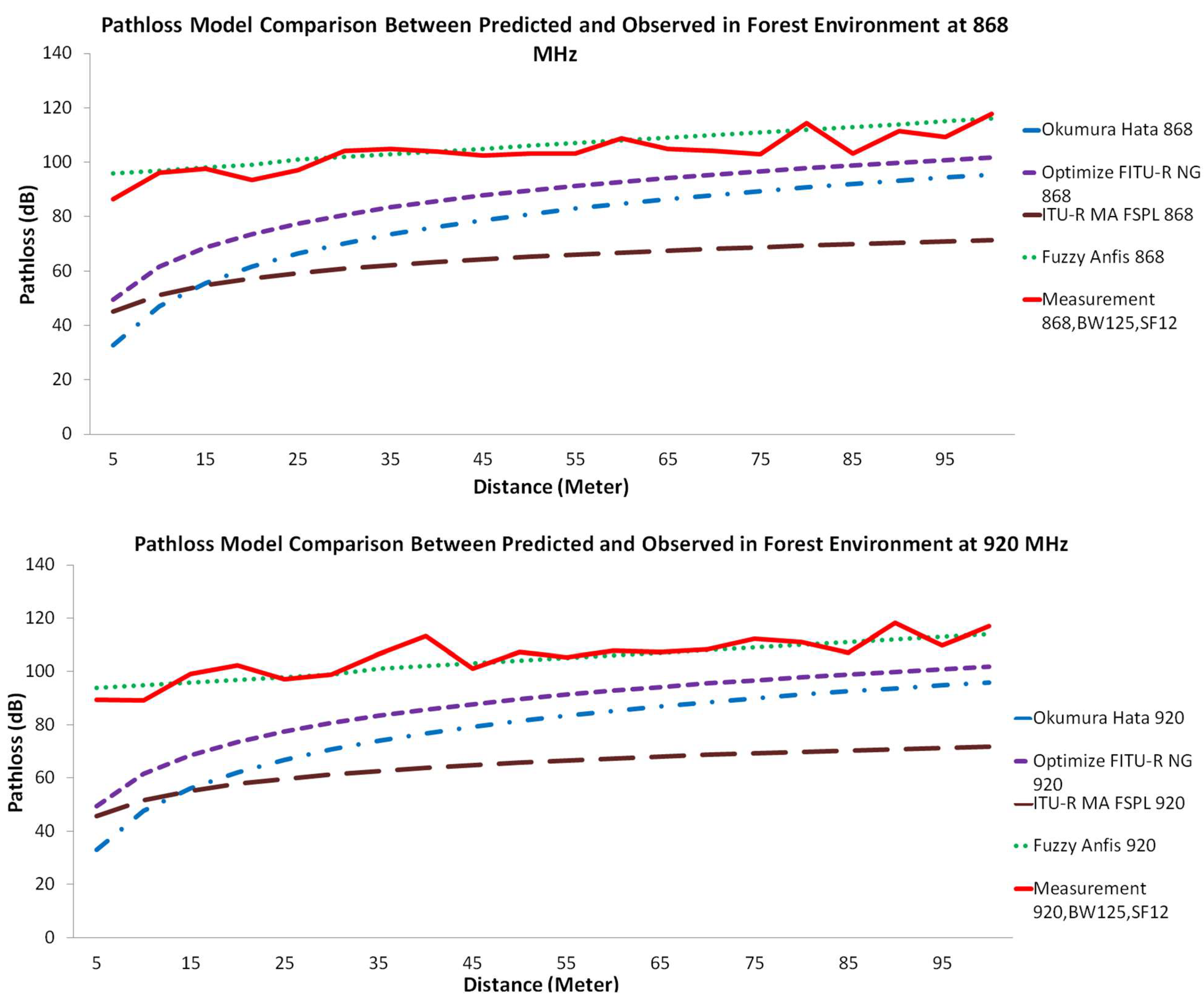
- Obstacle loss due to the vegetation environment that obstructed the signal. As stated by Salameh, “direct ray is the major contributor to the received signal by the receiver which is located near the ground of the forest. The implication here is that the ground reflected ray in this environment is negligible, since the forest ground is covered with shrubs that can absorb the wave” [37].
- Obstacle loss due to the Fresnel zone that was caused by low antenna height. Because our measurement was placed with an antenna height of less than 30 cm, this Fresnel zone acted as an obstacle according to Adi and Kitagawa. They stated that the Fresnel zone area is influenced by antenna height: the higher the value of the antenna height, the greater the percentage of the Fresnel zone clearance [55]. They further state that the lower frequency causes a bigger Fresnel zone; thus, it is no wonder that the measurement on 433 MHz generated a lower RSSI signal compared to 868 MHz and 920 MHz.
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- ITU-T Y.2221; Requirements for Support of Ubiquitous Sensor Network (USN) Applications and Services in the NGN Environment. ITU-T Recommendation: Geneva, Switzerland, 2010; p. 32.
- Del-Valle-Soto, C.; Mex-Perera, C.; Nolazco-Flores, J.A.; Velázquez, R.; Rossa-Sierra, A. Wireless sensor network energy model and its use in the optimization of routing protocols. Energies 2020, 13, 728. [Google Scholar] [CrossRef] [Green Version]
- Sharmin, N.; Karmaker, A.; Lambert, W.L.; Alam, M.S.; Shawkat, M.S.T.S.A. Minimizing the energy hole problem in wireless sensor networks: A wedge merging approach. Sensors 2020, 20, 277. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, J.; Zhong, Z.; Du, B.; Gutesa, S.; Kim, K. Low-cost and energy-saving wireless sensor network for real-time urban mobility monitoring system. J. Sensors 2015, 2015, 685756. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Li, S.; Chan, S.H.G.; He, J. WIANI: Wireless infrastructure and Ad-hoc network integration. IEEE Int. Conf. Commun. 2005, 5, 3623–3627. [Google Scholar] [CrossRef] [Green Version]
- Hefeeda, M.; Bagheri, M. Wireless sensor networks for early detection of forest fires. In Proceedings of the 2007 IEEE Internatonal Conference on Mobile Adhoc and Sensor Systems, MASS, Pisa, Italy, 8–11 October 2007. [Google Scholar] [CrossRef] [Green Version]
- Jamil, M.S.; Jamil, M.A.; Mazhar, A.; Ikram, A.; Ahmed, A.; Munawar, U. Smart Environment Monitoring System by Employing Wireless Sensor Networks on Vehicles for Pollution Free Smart Cities. Proc. Procedia Eng. 2015, 107, 480–484. [Google Scholar] [CrossRef] [Green Version]
- Sohail, M.; Khan, S.; Ahmad, R.; Singh, D.; Lloret, J. Game theoretic solution for power management in iot-based wireless sensor networks. Sensors 2019, 19, 3835. [Google Scholar] [CrossRef] [Green Version]
- Azmi, N.; Kamarudin, L.M.; Mahmuddin, M.; Zakaria, A.; Shakaff, A.Y.M.; Khatun, S.; Kamarudin, K.; Morshed, M.N. Interference issues and mitigation method in WSN 2.4GHz ISM band: A survey. In Proceedings of the 2014 2nd International Conference on Electronic Design (ICED), Penang, Malaysia, 19–21 August 2014. [Google Scholar] [CrossRef]
- Yun, Y.; Xia, Y. Maximizing the lifetime of wireless sensor networks with mobile sink in delay-tolerant applications. IEEE Trans. Mob. Comput. 2010, 9, 1308–1318. [Google Scholar] [CrossRef]
- Akbas, A.; Yildiz, H.U.; Tavli, B.; Uludag, S. Joint Optimization of Transmission Power Level and Packet Size for WSN Lifetime Maximization. IEEE Sens. J. 2016, 16, 5084–5094. [Google Scholar] [CrossRef]
- Uthra, R.A.; Raja, S.V.K. QoS routing in wireless sensor networks-A survey. ACM Comput. Surv. 2012, 45, 1–12. [Google Scholar] [CrossRef]
- Wahab, A.; Mustika, F.A.; Bahaweres, R.B.; Setiawan, D.; Alaydrus, M. Energy efficiency and loss of transmission data on Wireless Sensor Network with obstacle. In Proceedings of the 2016 10th International Conference on Telecommunication Systems Services and Applications (TSSA), Denpasar, Indonesia, 6–7 October 2017. [Google Scholar] [CrossRef]
- Bria, R.; Wahab, A.; Alaydrus, M. Energy Efficiency Analysis of TEEN Routing Protocol with Isolated Nodes. In Proceedings of the 2019 Fourth International Conference on Informatics and Computing (ICIC), Semarang, Indonesia, 16–17 October 2019. [Google Scholar] [CrossRef]
- Lukachan, G.; Labrador, M.A. SELAR: Scalable Energy-efficient Location Aided Routing protocol for wireless sensor networks. In Proceedings of the 29th Annual IEEE International Conference on Local Computer Networks, Tampa, FL, USA, 16–18 November 2004; pp. 694–695. [Google Scholar] [CrossRef]
- Yildiz, H.U.; Kurt, S.; Tavli, B. The impact of near-ground path loss modeling on wireless sensor network lifetime. In Proceedings of the 2014 IEEE Military Communications Conference, Baltimore, MD, USA, 6–8 October 2014; pp. 1114–1119. [Google Scholar] [CrossRef]
- Tang, W.; Ma, X.; Wei, J.; Wang, Z. Measurement and analysis of near-ground propagation models under different terrains for wireless sensor networks. Sensors 2019, 19, 1901. [Google Scholar] [CrossRef] [Green Version]
- Celaya-Echarri, M.; Azpilicueta, L.; Lopez-Iturri, P.; Picallo, I.; Aguirre, E.; Astrain, J.J.; Villadangos, J.; Falcone, F. Radio wave propagation and wsn deployment in complex utility tunnel environments. Sensors 2020, 20, 6710. [Google Scholar] [CrossRef] [PubMed]
- Olasupo, T.O.; Otero, C.E.; Otero, L.D.; Olasupo, K.O.; Kostanic, I. Path Loss Models for Low-Power, Low-Data Rate Sensor Nodes for Smart Car Parking Systems. IEEE Trans. Intell. Transp. Syst. 2018, 19, 1774–1783. [Google Scholar] [CrossRef]
- Khairunnniza-Bejo, S.; Ramli, N.H.; Muharam, F.M. Wireless sensor network (WSN) applications in plantation canopy areas: A review. Asian J. Sci. Res. 2018, 11, 151–161. [Google Scholar] [CrossRef]
- Faruk, N.; Popoola, S.I.; Surajudeen-Bakinde, N.T.; Oloyede, A.A.; Abdulkarim, A.; Olawoyin, L.A.; Ali, M.; Calafate, C.T.; Atayero, A.A. Path Loss Predictions in the VHF and UHF Bands within Urban Environments: Experimental Investigation of Empirical, Heuristics and Geospatial Models. IEEE Access 2019, 7, 77293–77307. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communications: Principles and Practice; Subsequent; Prentice Hall: Hoboken, NJ, USA, 2001. [Google Scholar]
- Chowdhury, M.M.J.; Sadi, S.H.; Sabuj, S.R. An Analytical Study of Single and Two-slope Model in Wireless Sensor Networks. In Proceedings of the 2018 IEEE International Conference on Advanced Networks and Telecommunications Systems (ANTS), Indore, India, 16–19 December 2018. [Google Scholar] [CrossRef]
- Hasan, M.Z.; Wan, T.C. Optimized quality of service for real-time wireless sensor networks using a partitioning multipath routing approach. J. Comput. Networks Commun. 2013, 2013, 497157. [Google Scholar] [CrossRef]
- Suroso, D.J.; Arifin, M.; Cherntanomwong, P. Distance-based Indoor Localization using Empirical Path Loss Model and RSSI in Wireless Sensor Networks. J. Robot. Control 2020, 1, 199–207. [Google Scholar] [CrossRef]
- Greenberg, E.; Klodzh, E. Comparison of deterministic, empirical and physical propagation models in urban environments. In Proceedings of the 2015 IEEE International Conference on Microwaves, Communications, Antennas and Electronic Systems (COMCAS), Tel Aviv, Israel, 2–4 November 2015. [Google Scholar] [CrossRef]
- He, R.; Gong, Y.; Bai, W.; Li, Y.; Wang, X. Random Forests Based Path Loss Prediction in Mobile Communication Systems. In Proceedings of the 2020 IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020. [Google Scholar] [CrossRef]
- Mao, K.; Ning, B.; Zhu, Q.; Ye, X.; Li, H.; Song, M.; Hua, B. ML-based delay–angle-joint path loss prediction for UAV mmWave channels. Wirel. Networks 2021, 1–13. [Google Scholar] [CrossRef]
- Umair, M.Y.; Ramana, K.V.; Dongkai, Y. An enhanced K-Nearest Neighbor algorithm for indoor positioning systems in a WLAN. In Proceedings of the 2014 IEEE Computers, Communications and IT Applications Conference, Beijing, China, 20–22 October 2014. [Google Scholar] [CrossRef]
- Moraitis, N.; Tsipi, L.; Vouyioukas, D.; Gkioni, A.; Louvros, S. Performance evaluation of machine learning methods for path loss prediction in rural environment at 3.7 GHz. Wirel. Networks 2021, 37, 4169–4188. [Google Scholar] [CrossRef]
- Zhang, Y.; Wen, J.; Yang, G.; He, Z.; Wang, J. Path loss prediction based on machine learning: Principle, method, and data expansion. Appl. Sci. 2019, 9, 1908. [Google Scholar] [CrossRef] [Green Version]
- Sotiroudis, S.P.; Goudos, S.K.; Siakavara, K. Neural Networks and Random Forests: A Comparison Regarding Prediction of Propagation Path Loss for NB-IoT Networks. In Proceedings of the 2019 8th International Conference on Modern Circuits and Systems Technologies (MOCAST), Thessaloniki, Greece, 13–15 May 2019. [Google Scholar] [CrossRef]
- Jang, J.S.R. ANFIS: Adaptive-Network-Based Fuzzy Inference System. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Cruz, H.A.O.; Nascimento, R.N.A.; Araujo, J.P.L.; Pelaes, E.G.; Cavalcante, G.P.S. Methodologies for path loss prediction in LTE-1.8 GHz networks using neuro-fuzzy and ANN. In Proceedings of the 2017 SBMO/IEEE MTT-S International Microwave and Optoelectronics Conference (IMOC), Aguas de Lindoia, Brazil, 27–30 August 2017. [Google Scholar] [CrossRef]
- Hata, M. Empirical Formula for Propagation Loss in Land Mobile Radio Services. IEEE Trans. Veh. Technol. 1980, 29, 317–325. [Google Scholar] [CrossRef]
- Meng, Y.S.; Member, S.; Lee, Y.H.; Ng, B.C.; Member, S. Empirical Near Ground Path Loss Modeling in a Forest at VHF and UHF Bands. IEEE Trans. Antennas Propag. 2009, 57, 1461–1468. [Google Scholar] [CrossRef]
- Al Salameh, M.S.H. Vegetation Attenuation Combined with Propagation Models versus Path Loss Measurements in Forest Areas. In World Symposium on Web Application and Networking-International Conference on Network Technologies and Communication Systems; Jordan University of Science and Technology: Irbid, Jordan, 2014. [Google Scholar]
- Catini, A.; Papale, L.; Capuano, R.; Pasqualetti, V.; Di Giuseppe, D.; Brizzolara, S.; Tonutti, P.; Di Natale, C. Development of a sensor node for remote monitoring of plants. Sensors 2019, 19, 4865. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Visconti, P.; de Fazio, R.; Velázquez, R.; Del-Valle-soto, C.; Giannoccaro, N.I. Development of sensors-based agri-food traceability system remotely managed by a software platform for optimized farm management. Sensors 2020, 20, 3632. [Google Scholar] [CrossRef]
- Waghmare, P.; Chaure, P.; Chandgude, M.; Chaudhari, A. Survey on: Home automation systems. In Proceedings of the 2017 International Conference on Trends in Electronics and Informatics (ICEI), Tirunelveli, India, 11–12 May 2017. [Google Scholar] [CrossRef]
- Lavric, A.; Popa, V. Internet of Things and LoRaTM Low-Power Wide-Area Networks: A survey. In Proceedings of the 2017 International Symposium on Signals, Circuits and Systems (ISSCS), Iasi, Romania, 13–14 July 2017. [Google Scholar] [CrossRef]
- Turmudzi, M.; Rakhmatsyah, A.; Wardana, A.A. Analysis of Spreading Factor Variations on LoRa in Rural Areas. In Proceedings of the 2019 International Conference on ICT for Smart Society (ICISS), Bandung, Indonesia, 19–20 November 2019. [Google Scholar] [CrossRef]
- Sendra, S.; García, L.; Lloret, J.; Bosch, I.; Vega-Rodríguez, R. LoRaWAN network for fire monitoring in rural environments. Electronics 2020, 9, 531. [Google Scholar] [CrossRef] [Green Version]
- Iswanto, I.; Ahmad, I. Second-order integral fuzzy logic control based rocket tracking control. J. Robot. Control 2021, 2, 594–604. [Google Scholar] [CrossRef]
- Adriansyah, A.; Gunardi, Y.; Badaruddin, B.; Ihsanto, E. Goal-seeking Behavior-based Mobile Robot Using Particle Swarm Fuzzy Controller. Telecommun. Comput. Electron. Control. 2015, 13, 528. [Google Scholar] [CrossRef] [Green Version]
- Kristiyono, R.; Wiyono, W. Autotuning Fuzzy PID Controller for Speed Control of BLDC Motor. J. Robot. Control 2021, 2, 400–407. [Google Scholar] [CrossRef]
- AlKhlidi, B.; Abdulsadda, A.T.; Al Bakri, A. Optimal Robotic Path Planning Using Intlligents Search Algorithms. J. Robot. Control 2021, 2, 519–526. [Google Scholar] [CrossRef]
- Lin, Z.; Cui, C.; Wu, G. Dynamic modeling and torque feedforward based optimal fuzzy pd control of a high-speed parallel manipulator. J. Robot. Control 2021, 2, 527–538. [Google Scholar] [CrossRef]
- Sahloul, S.; Ben Halima Abid, D.; Rekik, C. An hybridization of global-local methods for autonomous mobile robot navigation in partially-known environments. J. Robot. Control 2021, 2, 221–233. [Google Scholar] [CrossRef]
- Jang, J.-S.R.; Sun, C.-T.; Mizutani, E. Neuro-Fuzzy and Soft Computing-A Computational Approach to Learning and Machine Intelligence; Prentice Hall: Hoboken, NJ, USA, 1997. [Google Scholar]
- Zadeh, L.A. The Concept of a Linguistic Variable and its Application to Approximate Reasoning. Inf. Sci. 1975, 8, 199–249. [Google Scholar] [CrossRef]
- Yusof, N.; Bahiah, N.; Shahizan, M.; Chun, Y. A Concise Fuzzy Rule Base to Reason Student Performance Based on Rough-Fuzzy Approach. In Fuzzy Inference System—Theory and Applications; IntechOpen: London, UK, 2012; Available online: https://www.intechopen.com/chapters/36629 (accessed on 1 March 2022). [CrossRef]
- Yeom, C.U.; Kwak, K.C. Adaptive neuro-fuzzy inference system predictor with an incremental tree structure based on a context-based fuzzy clustering approach. Appl. Sci. 2020, 10, 8495. [Google Scholar] [CrossRef]
- Savage, D.N.; Ndzi, A.; Seville, E.V.; Austin, J. Radio wave propagation through vegetation: Factors influencing signal attenuation. Radio Sci. 2003, 38, 1–9. [Google Scholar] [CrossRef]
- Adi, P.D.P.; Kitagawa, A. Performance evaluation of E32 long range radio frequency 915 MHz based on internet of things and micro sensors data. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 38–49. [Google Scholar] [CrossRef] [Green Version]
- Chrysikos, T.; Kotsopoulos, S.; Babulak, E. A Generic method for the reliable calculation of large-scale fading in an obstacle-dense propagation environment. In Integrated Models for Information Communication Systems and Networks: Design and Development; IGI Global: Hershey, PA, USA, 2013; pp. 256–277. [Google Scholar] [CrossRef] [Green Version]
- Surajudeen-Bakinde, N.T.; Faruk, N.; Popoola, S.I.; Salman, M.A.; Oloyede, A.A.; Olawoyin, L.A.; Calafate, C.T. Path loss predictions for multi-transmitter radio propagation in VHF bands using Adaptive Neuro-Fuzzy Inference System. Eng. Sci. Technol. Int. J. 2018, 21, 679–691. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency | 433, 868, 920 MHz |
| Bandwidth | 125, 250, 500 KHz |
| Spreading Factor | 7–12 |
| Antenna Gain | 0 dBi |
| Tx-power | 20 dbm |
| Measurement Parameter | RSSI |
| Measurement | Propagation Model | ||||
|---|---|---|---|---|---|
| Environment | Frequency | Okumura-Hata | Optimized FITU-R NG | ITU-R MA FSPL | Fuzzy ANFIS |
| Forest | 433 MHz | 12.28 | 8.57 | 15.49 | 1.30 |
| 868 MHz | 6.32 | 4.08 | 9.58 | 1.46 | |
| 920 MHz | 6.67 | 4.55 | 15.79 | 1.23 | |
| Jungle | 433 MHz | 11.97 | 8.18 | 15.28 | 1.11 |
| 868 MHz | 6.45 | 4.16 | 9.82 | 1.91 | |
| 920 MHz | 7.20 | 5.03 | 16.35 | 1.06 | |
| Open Dirt Road | 433 MHz | 22.77 | 10.56 | 22.29 | 0.88 |
| 868 MHz | 16.22 | 5.99 | 15.49 | 0.98 | |
| 920 MHz | 17.48 | 7.40 | 16.72 | 1.66 | |
| Measurement | Propagation Model | ||||
|---|---|---|---|---|---|
| Environment | Frequency | Okumura Hata | Optimized FITU-R NG | ITU-R MA FSPL | Fuzzy ANFIS |
| Forest | 433 MHz | 51.44 | 36.11 | 65.02 | 3.05 |
| 868 MHz | 26.12 | 16.89 | 39.94 | 3.80 | |
| 920 MHz | 28.20 | 19.45 | 42.02 | 3.30 | |
| Jungle | 433 MHz | 50.98 | 30.98 | 60.31 | 3.35 |
| 868 MHz | 29.16 | 15.00 | 38.48 | 5.13 | |
| 920 MHz | 32.59 | 18.90 | 41.89 | 3.10 | |
| Open Dirt Road | 433 MHz | 46.48 | 24.54 | 57.86 | 1.61 |
| 868 MHz | 40.80 | 14.84 | 42.33 | 2.31 | |
| 920 MHz | 43.63 | 18.07 | 45.07 | 4.05 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hakim, G.P.N.; Habaebi, M.H.; Toha, S.F.; Islam, M.R.; Yusoff, S.H.B.; Adesta, E.Y.T.; Anzum, R. Near Ground Pathloss Propagation Model Using Adaptive Neuro Fuzzy Inference System for Wireless Sensor Network Communication in Forest, Jungle and Open Dirt Road Environments. Sensors 2022, 22, 3267. https://doi.org/10.3390/s22093267
Hakim GPN, Habaebi MH, Toha SF, Islam MR, Yusoff SHB, Adesta EYT, Anzum R. Near Ground Pathloss Propagation Model Using Adaptive Neuro Fuzzy Inference System for Wireless Sensor Network Communication in Forest, Jungle and Open Dirt Road Environments. Sensors. 2022; 22(9):3267. https://doi.org/10.3390/s22093267
Chicago/Turabian StyleHakim, Galang P. N., Mohamed Hadi Habaebi, Siti Fauziah Toha, Mohamed Rafiqul Islam, Siti Hajar Binti Yusoff, Erry Yulian Triblas Adesta, and Rabeya Anzum. 2022. "Near Ground Pathloss Propagation Model Using Adaptive Neuro Fuzzy Inference System for Wireless Sensor Network Communication in Forest, Jungle and Open Dirt Road Environments" Sensors 22, no. 9: 3267. https://doi.org/10.3390/s22093267
APA StyleHakim, G. P. N., Habaebi, M. H., Toha, S. F., Islam, M. R., Yusoff, S. H. B., Adesta, E. Y. T., & Anzum, R. (2022). Near Ground Pathloss Propagation Model Using Adaptive Neuro Fuzzy Inference System for Wireless Sensor Network Communication in Forest, Jungle and Open Dirt Road Environments. Sensors, 22(9), 3267. https://doi.org/10.3390/s22093267