
Pulse Broadening Effects on Ranging Performance of a Laser Altimeter with Return-to-Zero Pseudorandom Noise Code Modulation


Abstract
:1. Introduction
2. Detection Models of RZPN Laser Altimeter
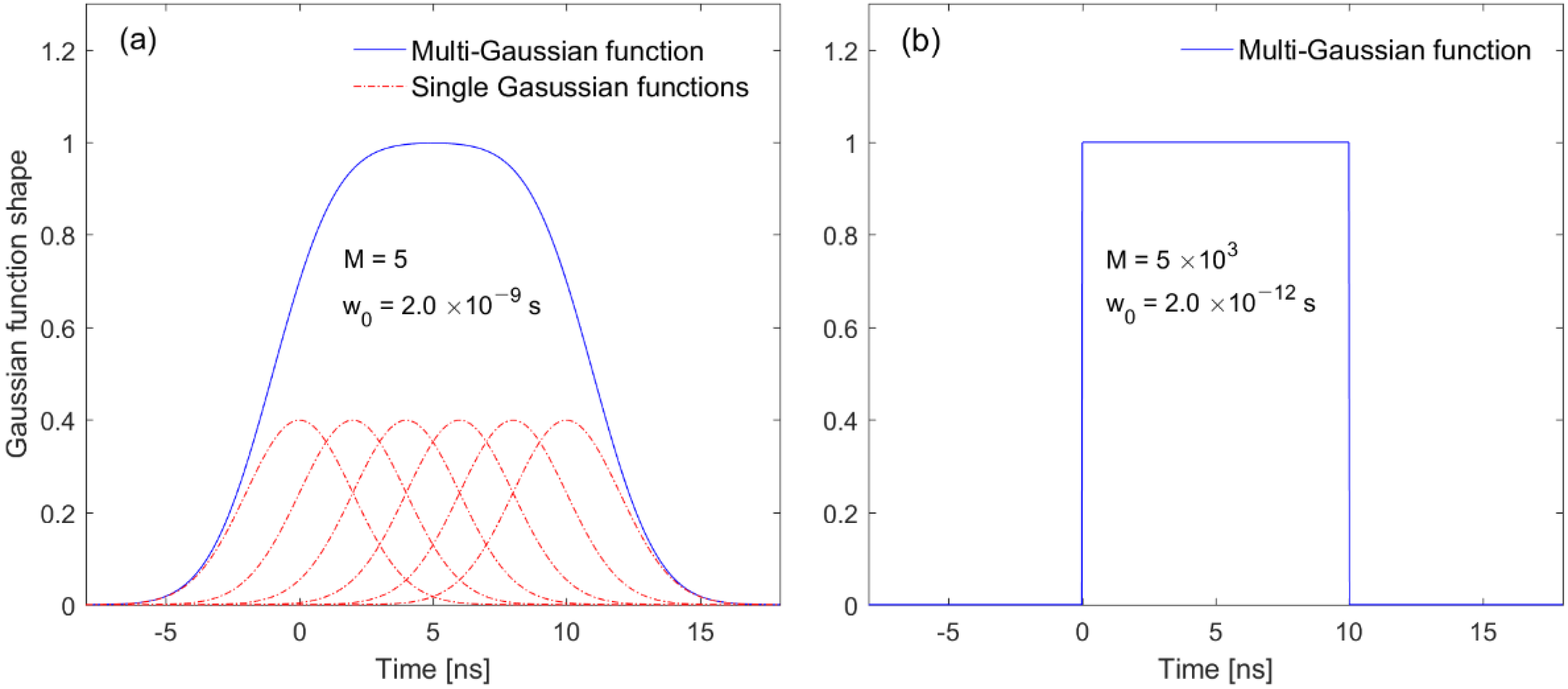
2.1. Flat-Topped Multi-Gaussian Beam
2.2. Laser Altimeter with the RZPN Code Modulation Technique
2.3. Received Waveform Models
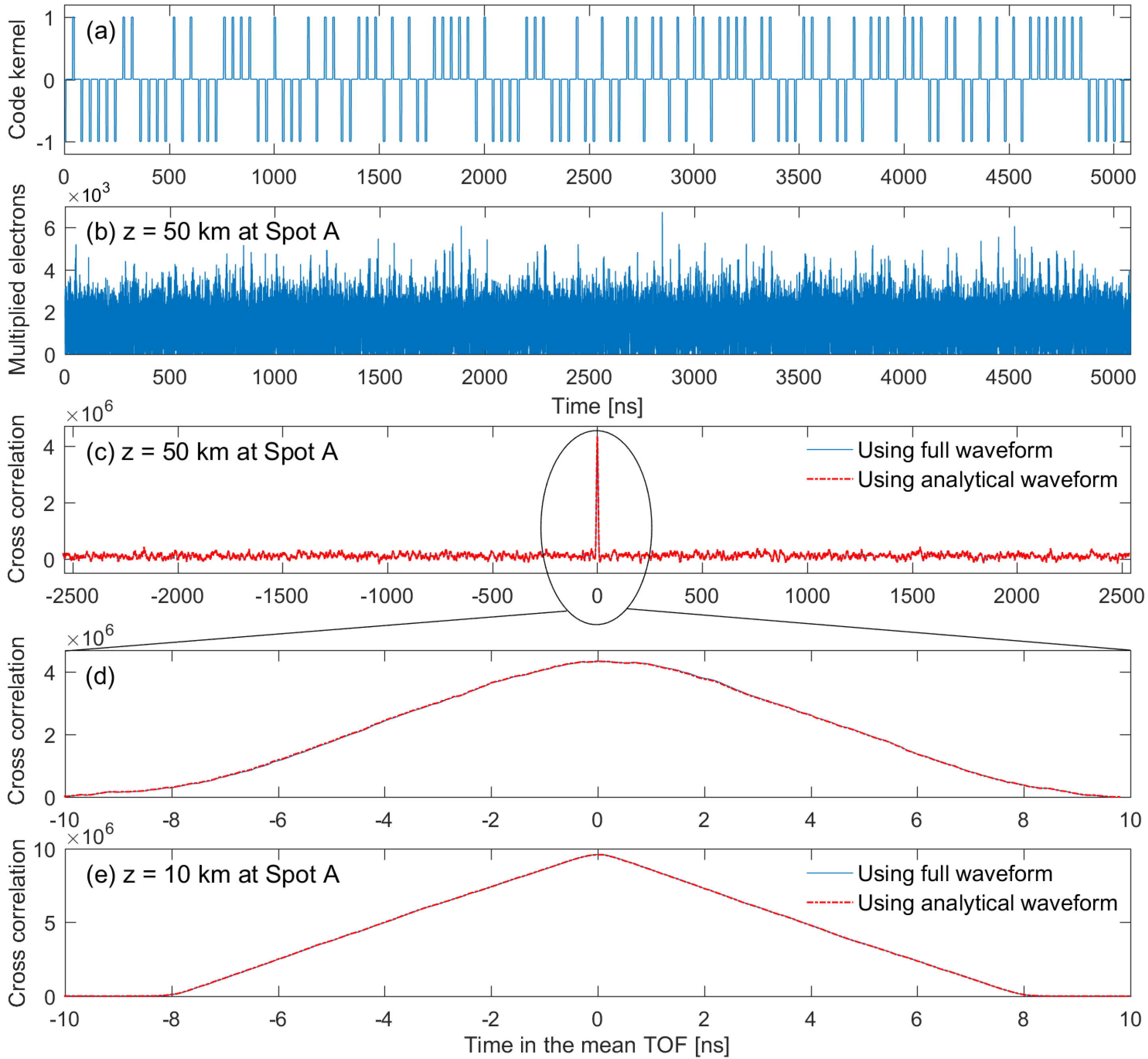
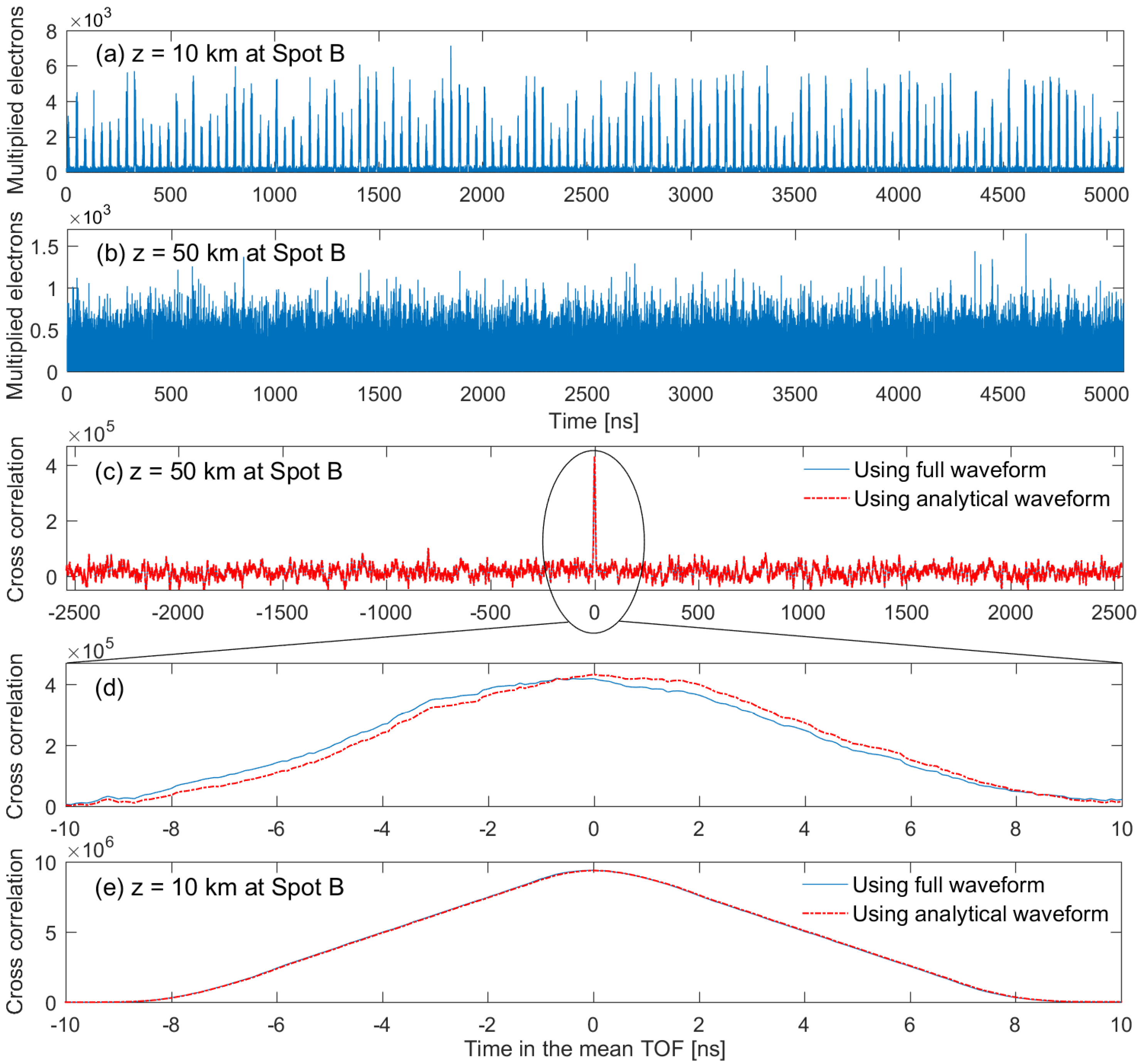
2.4. Cross-Correlation
3. Performance Metrics
3.1. Signal-to-Noise Ratio
3.2. Detection Probability
4. Numerical Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Lim, H.C.; Neumann, G.A.; Choi, M.H.; Yu, S.Y.; Bang, S.C.; Ka, N.H.; Park, J.U.; Choi, M.S.; Park, E. Baseline Design and Performance Analysis of Laser Altimeter for Korean Lunar Orbiter. J. Astron. Space Sci. 2016, 33, 211–219. [Google Scholar] [CrossRef]
- Sun, X.; Abshire, J.B.; McGarry, J.F.; Neumann, G.A.; Smith, J.C.; Cavanaugh, J.F.; Smith, D.J.; Zwally, H.J.; Smith, D.E.; Zuber, M.T. Space Lidar Developed at the NASA Goddard Space Flight Center—The First 20 Years. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1660–1675. [Google Scholar] [CrossRef]
- Sun, X.; Abshire, J.B.; Krainak, M.A.; Hasselbrack, W.B. Photon counting pseudorandom noise code laser altimeters. In Proceedings of the SPIE Advanced Photon Counting Techniques II, Boston, MA, USA, 9–11 September 2007; Volume 6771. [Google Scholar]
- Guilhot, D.; Ribes-Pleguezuelo, P. Laser Technology in Photonic Applications for Space. Instruments 2019, 3, 50. [Google Scholar] [CrossRef] [Green Version]
- Takeuchi, N.; Sugimoto, N.; Baba, H.; Sakurai, K. Random modulation cw lidar. Appl. Opt. 1983, 22, 1382–1386. [Google Scholar] [CrossRef] [PubMed]
- Takeuchi, N.; Baba, H.; Sakurai, K.; Ueno, T. Diode-laser random-modulation cw lidar. Appl. Opt. 1986, 25, 63–67. [Google Scholar] [CrossRef] [PubMed]
- Machol, J.L. Comparison of the pseudorandom noise code and pulsed direct-detection lidar for atmospheric probing. Appl. Opt. 1997, 36, 6021–6023. [Google Scholar] [CrossRef] [PubMed]
- Matthey, R.; Mitev, V. Pseudo-random noise-continuous-wave laser radar for surface and cloud measurements. Opt. Lasers Eng. 2005, 43, 557–571. [Google Scholar] [CrossRef]
- Yang, F.; Zhang, X.; He, Y.; Chen, W. High speed pseudorandom modulation fiber laser ranging system. Chin. Opt. Lett. 2014, 12, 79–82. [Google Scholar] [CrossRef] [Green Version]
- Ardanuy, A.; Comerón, A. Compact lidar system using laser diode, binary continuous wave power modulation, and an avalanche photodiode-based receiver controlled by a digital signal processor. Opt. Eng. 2018, 57, 044104. [Google Scholar] [CrossRef]
- Quatrevalet, M.; Ai, X.; Perez-Serrano, A.; Adamiec, P.; Barbero, J.; Fix, A.; Tijero, J.M.G.; Esquivias, I.; Rarity, J.G.; Ehret, G. Atmospheric CO2 Sensing with a Random Modulation Continuous Wave Integrated Path Differential Absorption Lidar. IEEE J. Sel. Top. Quantum Electron. 2017, 23, 157–167. [Google Scholar] [CrossRef]
- Li, F.; Li, T.; Fang, X.; Tian, B.; Dou, X. Pseudo-random modulation continuous-wave lidar for the measurements of mesopause region sodium density. Opt. Express 2021, 29, 1932–1944. [Google Scholar] [CrossRef] [PubMed]
- Biswas, A.; Hemmati, H.; Lesh, J.R. High data-rate laser transmitters for free-space laser communications. In Proceedings of the SPIE Free-Space Laser Communication Technologies, San Jose, CA, USA, 27 January–2 February 1999; Volume 3615. [Google Scholar]
- Engin, D.; Litvinovitch, V.; Kimpel, F.; Puffenberger, K.; Dang, X.; Fouron, J.-L.; Martin, N.; Storm, M.; Gupta, S.; Utano, R. Highly reliable and efficient 1.5um-fiber-MOPA-based, high-power laser transmitter for space communication. In Proceedings of the SPIE Laser Technology for Defense and Security, Baltimore, MD, USA, 5–9 May 2014; Volume 9081. [Google Scholar]
- Kingbury, R.W.; Caplan, D.O.; Cahoy, K.L. Compact optical transmitters for CubeSat free-space optical communications. In Proceedings of the SPIE Free-Space Laser Communications and Atmospheric Propagation, San Francisco, CA, USA, 13–18 February 2015; Volume 9354. [Google Scholar]
- Rose, T.S.; Rowen, D.W.; LaLumondiere, S.D.; Werner, N.I.; Linares, R.; Faler, A.C.; Wicker, J.M.; Coffman, C.M.; Maul, G.A.; Chien, D.H.; et al. Optical communications downlink from a low-earth orbiting 1.5U CubeSat. Opt. Express 2019, 27, 24382–24392. [Google Scholar] [CrossRef] [PubMed]
- Matthey, R.; Mitev, V. Computer model study of pseudo-random noise modulation continuous-wave (PRN-cw) Backscatter Lidar. In Proceedings of the SPIE Lidar and Atmospheric Sensing, Munich, Germany, 19–23 June 1995; Volume 2505. [Google Scholar]
- Rogalski, A. HgCdTe infrared detector material: History, status and outlook. Rep. Prog. Phys. 2005, 68, 2267–2336. [Google Scholar] [CrossRef] [Green Version]
- Sun, X.; Abshire, J.B.; Beck, J.D.; Mitra, P.; Reiff, K.; Yang, G. HgCdTe avalanche photodiode detectors for airborne and spaceborne lidar at infrared wavelengths. Opt. Express 2017, 25, 16589–16602. [Google Scholar] [CrossRef] [PubMed]
- Rothman, J.; Bleuet, P.; Abergel, J.; Gout, S.; Lasfargues, G. HgCdTe APDs detector developments at CEA/Leti for atmospheric lidar and free space optical communications. In Proceedings of the SPIE International Conference on Space Optics, Chania, Greece, 9–12 October 2018; Volume 11180. [Google Scholar]
- Norman, D.M.; Gardner, C.S. Satellite laser ranging using pseudonoise code modulated laser diodes. Appl. Opt. 1988, 27, 3650–3655. [Google Scholar] [CrossRef]
- Lim, H.C.; Sung, K.P.; Choi, M.; Park, J.U.; Choi, C.S.; Bang, S.C.; Choi, Y.J.; Moon, H.K. Evaluation of a Laser Altimeter using the Pseudo-Random Noise Modulation Technique for Apophis Mission. J. Astron. Space Sci. 2021, 38, 165–173. [Google Scholar]
- Esteban, J.J.; Garcia, A.F.; Eichholz, J.; Peinado, A.M.; Bykov, I.; Heinzel, G.; Danzmann, K. Ranging and phase measurement for LISA. J. Phys. Conf. Ser. 2010, 228, 012045. [Google Scholar] [CrossRef]
- Sun, X.; Abshire, J.B. Modified PN Code Laser Modulation Technique for Laser Measurements. In Proceedings of the SPIE Free-Space Laser Communication Technologies, San Jose, CA, USA, 27 January–2 February 2009; Volume 7199. [Google Scholar]
- Sun, X.; Cremons, D.R.; Mazarico, E.; Yang, G.; Abshire, J.B.; Smith, D.E.; Zuber, M.T.; Storm, M.; Martin, N.; Hwang, J.; et al. Small All-Range Lidar for Asteroid and Comet Core Missions. Sensors 2021, 21, 3081. [Google Scholar] [CrossRef]
- Cremons, D.R.; Sun, X.; Abshire, J.B.; Mazarico, E. Small PN-Code Lidar for Asteroid and Comet Missions—Receiver Processing and Performance Simulations. Remote Sens. 2021, 12, 2282. [Google Scholar] [CrossRef]
- Gardner, C.S. Target signatures for laser altimeters: An analysis. Appl. Opt. 1982, 21, 448–453. [Google Scholar] [CrossRef]
- Tsai, B.M.; Gardner, C.S. Remote sensing of sea state using laser altimeters. Appl. Opt. 1982, 21, 3932–3940. [Google Scholar] [CrossRef] [PubMed]
- Gardner, C.S. Ranging performance of satellite laser altimeters. IEEE Trans. Geosci. Remote Sens. 1992, 30, 1061–1072. [Google Scholar] [CrossRef] [Green Version]
- Abshire, J.B.; Sun, X.; Afzal, R.S. Mars orbiter laser altimeter: Receiver model and performance analysis. Appl. Opt. 2000, 39, 2449–2460. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gunderson, K.; Thomas, N. BELA receiver performance modeling over the BepiColombo mission lifetime. Planet. Space Sci. 2010, 58, 309–318. [Google Scholar] [CrossRef]
- Wagner, W.; Ullrich, A.; Ducic, V.; Melzer, T.; Studnicka, N. Gaussian decomposition and calibration of a novel small-footprint full-waveform digitizing airborne laser scanner. ISPRS J. Photogramm. Remote Sens. 2006, 60, 100–112. [Google Scholar] [CrossRef]
- Hofton, M.A.; Minster, J.B.; Blair, B. Decomposition of Laser Altimeter Waveforms. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1989–1996. [Google Scholar] [CrossRef]
- Mallet, C.; Bretar, F. Full-waveform topographic LiDAR: State-of-the-art. ISPRS J. Photogramm. Remote Sens. 2009, 64, 1–16. [Google Scholar] [CrossRef]
- Lim, H.-C.; Zhang, Z.-P.; Sung, K.-P.; Park, J.U.; Kim, S.; Choi, C.-S.; Choi, M. Modeling and Analysis of an Echo Laser Pulse Waveform for the Orientation Determination of Space Debris. Remote Sens. 2020, 12, 1659. [Google Scholar] [CrossRef]
- Tovar, A.A. Propagation of flat-topped multi-Gaussian laser beams. J. Opt. Soc. Am. A 2001, 18, 1897–1904. [Google Scholar] [CrossRef]
- Gao, Y.; Zhu, B.; Liu, D.; Lin, Z. Propagation of flat-topped multi-Gaussian beams through a double-lens system with apertures. Opt. Express 2009, 17, 12753–12766. [Google Scholar] [CrossRef]
- Gori, F. Flattened Gaussian beams. Opt. Commun. 1994, 107, 335–341. [Google Scholar] [CrossRef]
- Santarsiero, M.; Borghi, R. Correspondence between super-Gaussian and flattened Gaussian beams. J. Opt. Soc. Am. A 1999, 16, 188–190. [Google Scholar] [CrossRef]
- MacWilliams, F.J.; Sloane, N.J.A. Pseudo-random sequences and arrays. Proc. IEEE 1976, 64, 1715–1729. [Google Scholar] [CrossRef]
- Abshire, J.B. Performance of OOK and Low-Order PPM Modulations in Optical Communications When Using APD-Based Receivers. IEEE Trans. Commun. 1984, 32, 1140–1143. [Google Scholar] [CrossRef]
- Müller, T.G.; Hasegawa, S.; Usui, F. (25143) Itokawa: The power of radiometric techniques for the interpretation of remote thermal observations in the light of the Hayabusa rendezvous results. Publ. Astron. Soc. Jpn. 2014, 66, 1–17. [Google Scholar] [CrossRef] [Green Version]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Description | Symbol | Value |
|---|---|---|
| Laser wavelength | 1550 nm | |
| Average laser power | 2 W | |
| Tx optical efficiency | 0.90 | |
| Effective Rx area | 78.5 cm2 | |
| Rx optical efficiency | 0.75 | |
| Beam divergence | 30 µrad | |
| Receiver FOV | 30 µrad | |
| Optical filter bandwidth | 10 nm | |
| APD quantum efficiency | 0.7 | |
| APD gain | 500 | |
| APD excess noise factor | 1.2 | |
| Bulk dark current | 0.2 pA |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, H.-C.; Park, J.U.; Choi, M.; Park, E.; Sung, K.-P.; Jo, J.H. Pulse Broadening Effects on Ranging Performance of a Laser Altimeter with Return-to-Zero Pseudorandom Noise Code Modulation. Sensors 2022, 22, 3293. https://doi.org/10.3390/s22093293
Lim H-C, Park JU, Choi M, Park E, Sung K-P, Jo JH. Pulse Broadening Effects on Ranging Performance of a Laser Altimeter with Return-to-Zero Pseudorandom Noise Code Modulation. Sensors. 2022; 22(9):3293. https://doi.org/10.3390/s22093293
Chicago/Turabian StyleLim, Hyung-Chul, Jong Uk Park, Mansoo Choi, Eunseo Park, Ki-Pyoung Sung, and Jung Hyun Jo. 2022. "Pulse Broadening Effects on Ranging Performance of a Laser Altimeter with Return-to-Zero Pseudorandom Noise Code Modulation" Sensors 22, no. 9: 3293. https://doi.org/10.3390/s22093293
APA StyleLim, H. -C., Park, J. U., Choi, M., Park, E., Sung, K. -P., & Jo, J. H. (2022). Pulse Broadening Effects on Ranging Performance of a Laser Altimeter with Return-to-Zero Pseudorandom Noise Code Modulation. Sensors, 22(9), 3293. https://doi.org/10.3390/s22093293