
Multi-Sonar Distributed Fusion for Target Detection and Tracking in Marine Environment

 , , ,
, , ,
Abstract
:1. Introduction
- Propose a novel multiple forward prediction-integrated equivalent measurement fusion (MFP-IEMF) algorithm to fuse the multi-lag OOSTs with track origin uncertainty in an optimal manner, which is applicable in both synchronous and asynchronous multi-sonar fusion systems.
- Recursively calculate the probability of target existence as a track quality measure to detect marine targets.
- Propose a random central track initialization technique to timely detect the randomly born marine target.
2. Problem Statement
2.1. Target Model
2.2. Sonar Model
2.3. Challenge
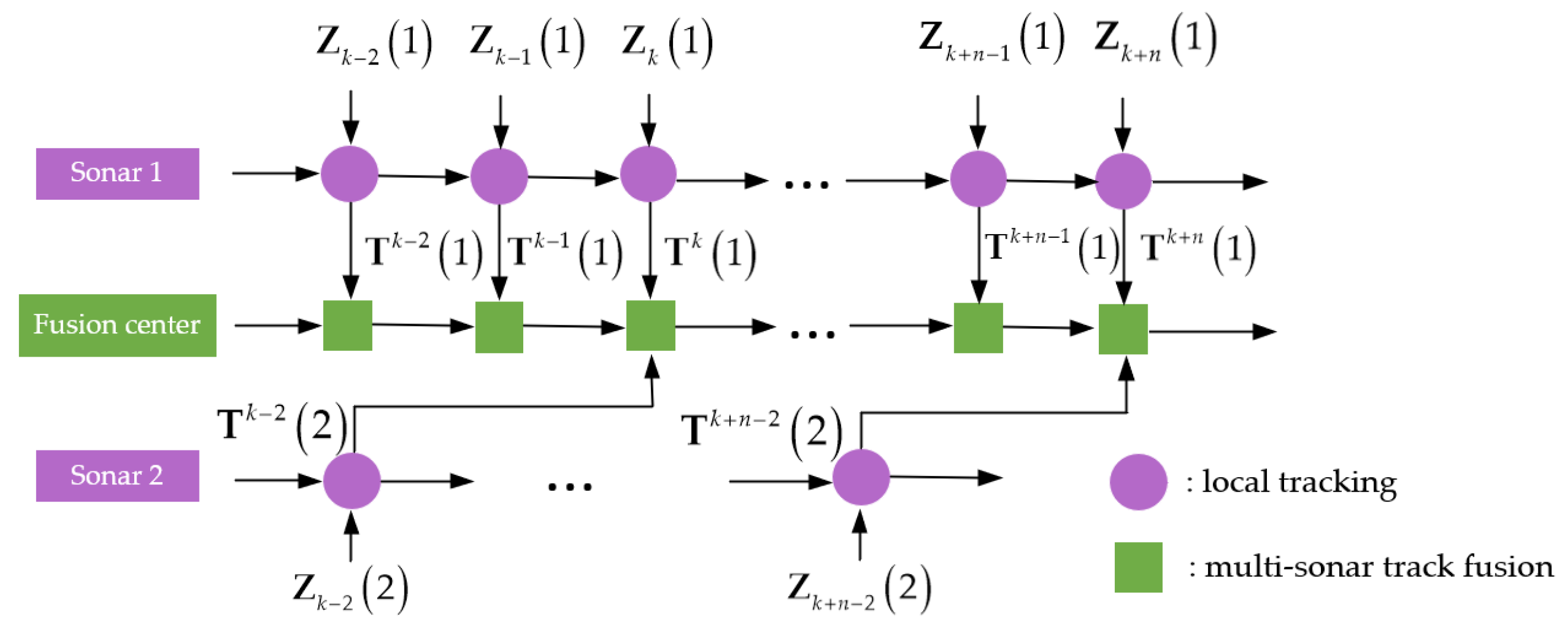
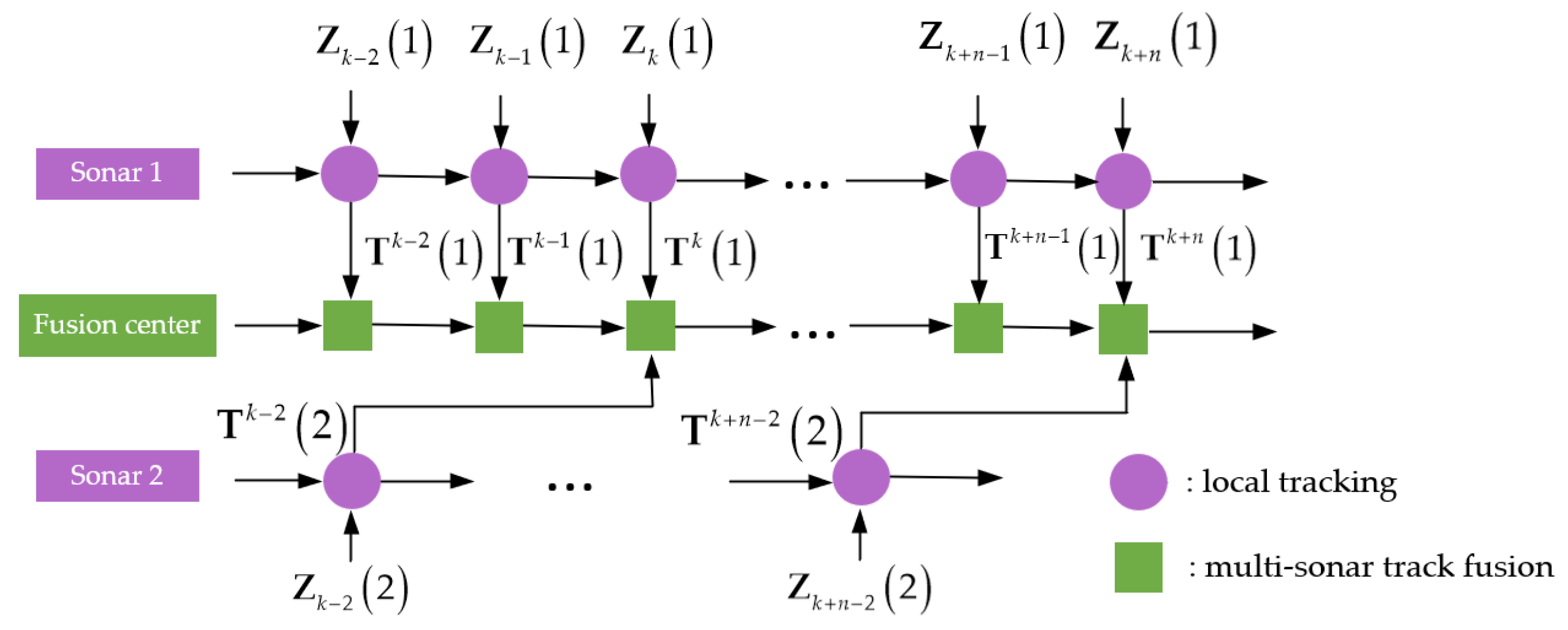
3. Multi-Sonar OOSTs Fusion with Track Origin Uncertainty
3.1. Framework of the Proposed MFP-IEMF Method
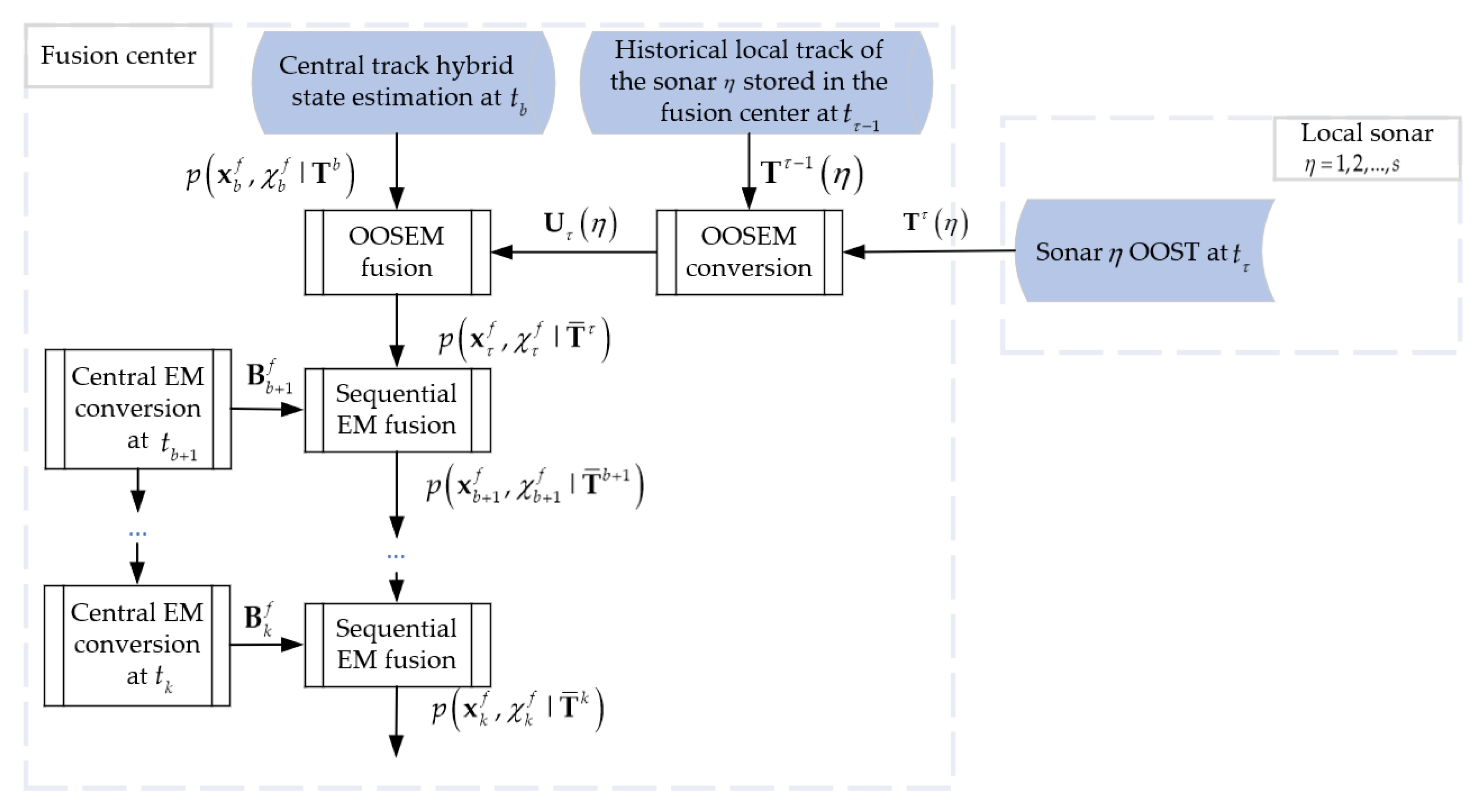
3.2. Synchronous OOSTs Fusion
3.2.1. Out-Of-Sequence Equivalent Measurement Conversion
3.2.2. Data Sorting
3.2.3. Fusion with OOSEMs
- 1.
- Gating technique
- 2.
- Hybrid state estimation
3.2.4. Central Equivalent Measurement Conversion
3.2.5. Sequential Fusion with Central Equivalent Measurement
3.3. Asynchronous OOSTs Fusion
4. Implementation Consideration
4.1. Marine Target Detection Strategy
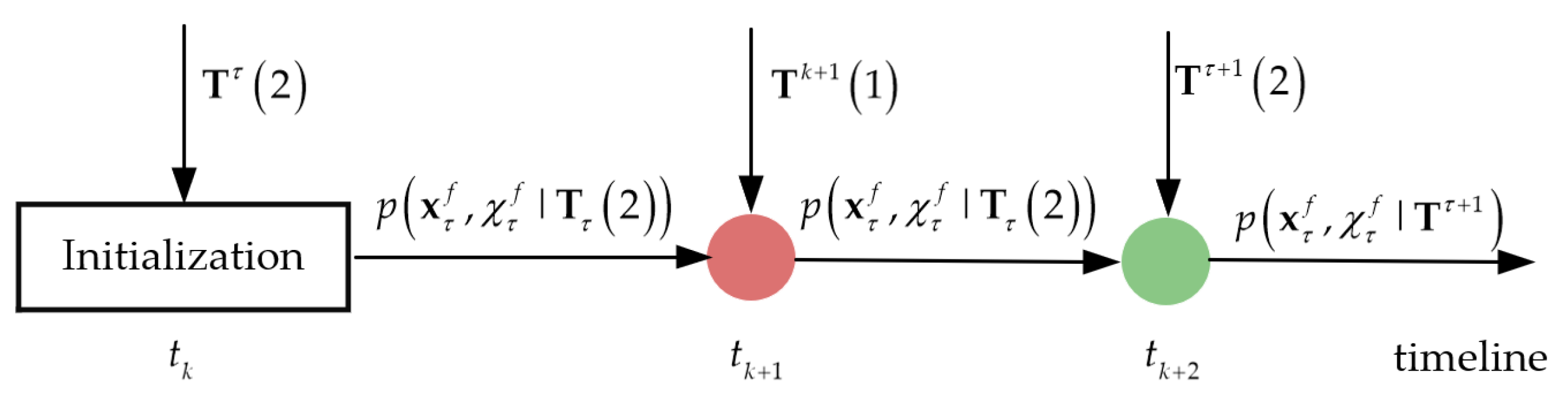
4.2. Random Central Track Initialization Technique
5. Simulation Validation and Analysis
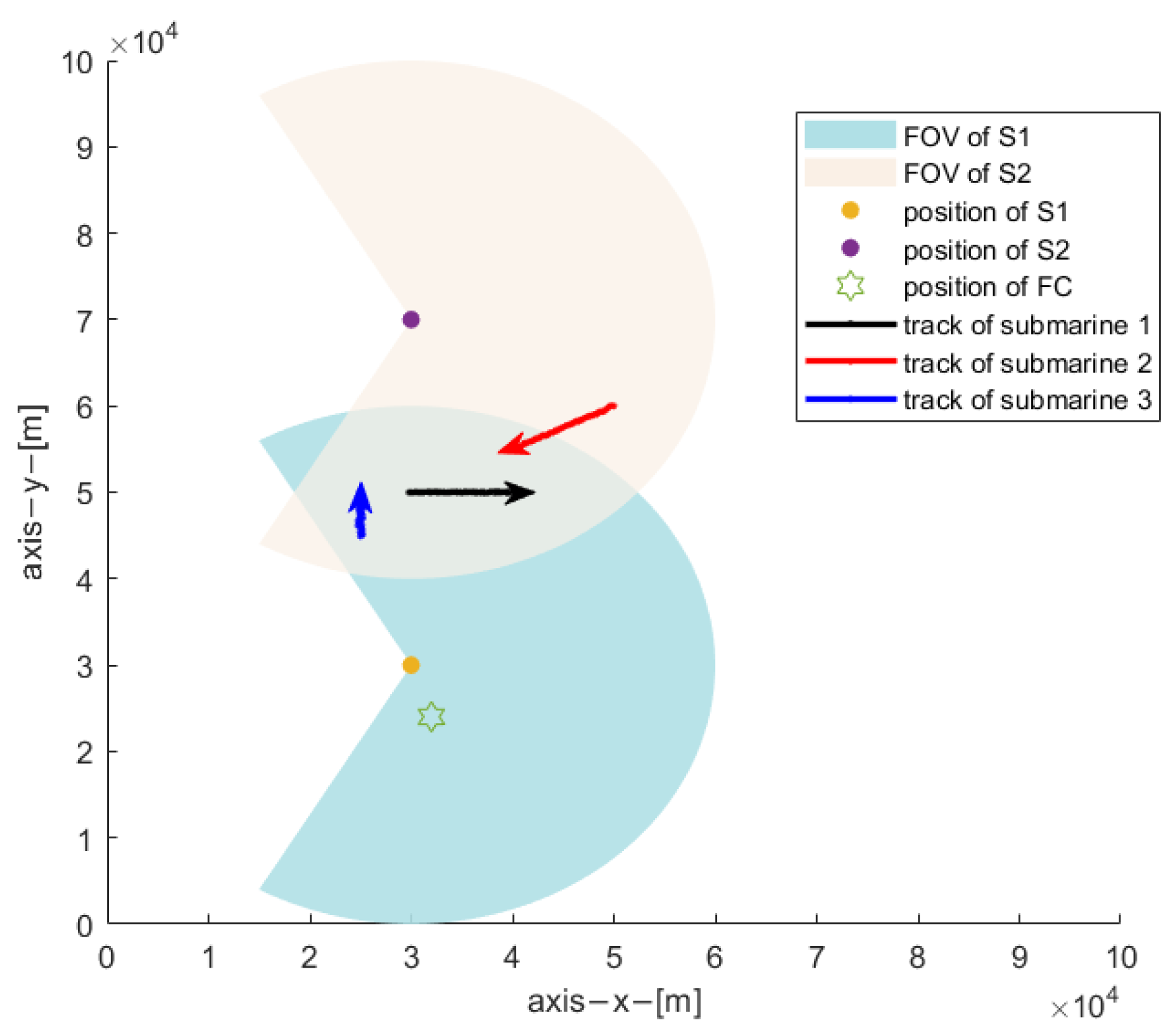
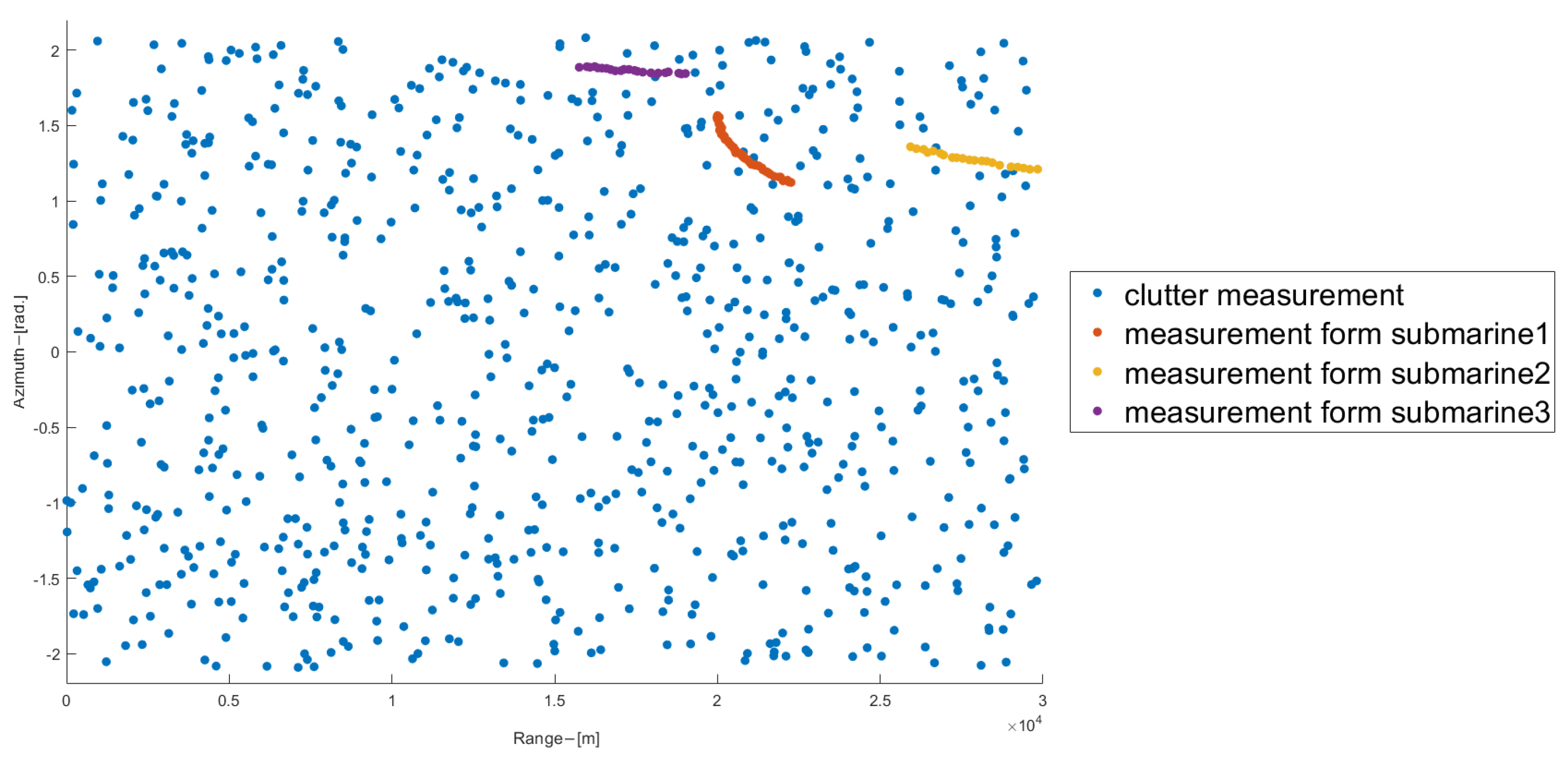
5.1. Simulation Setup
5.2. Simulation Results and Analysis
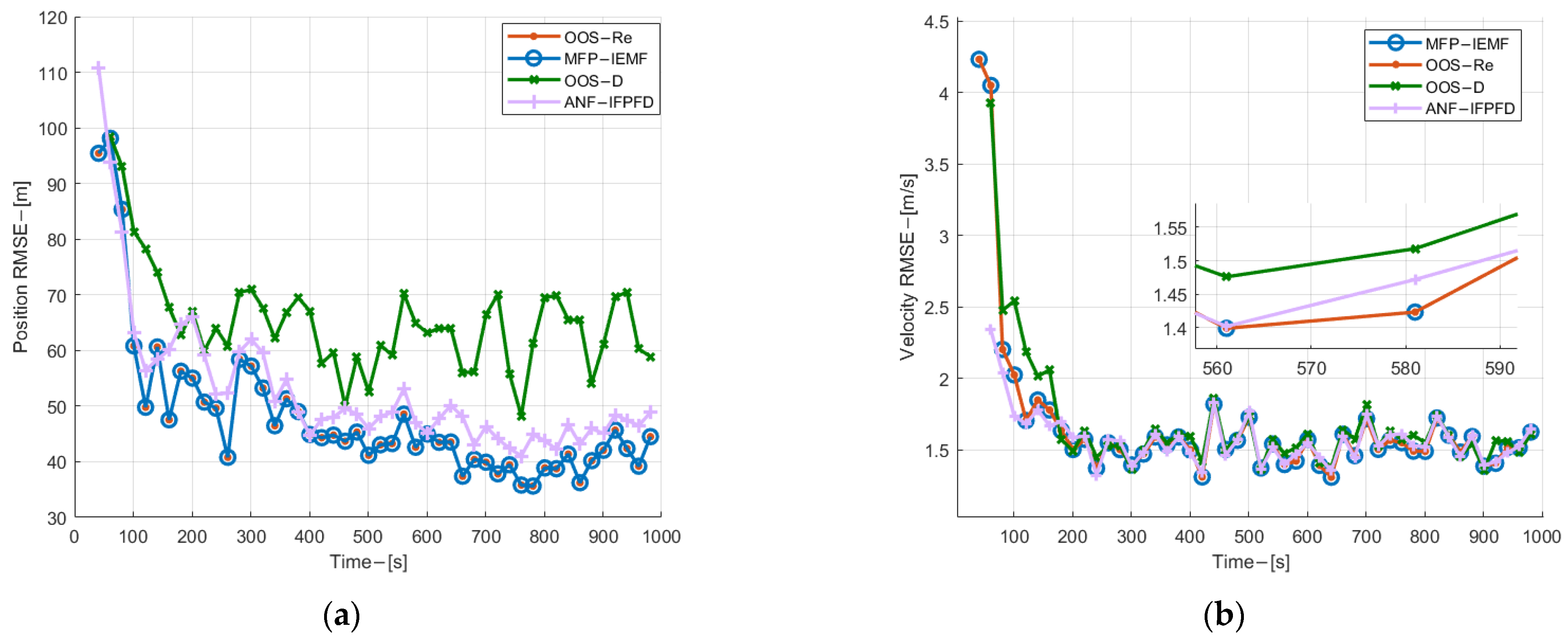
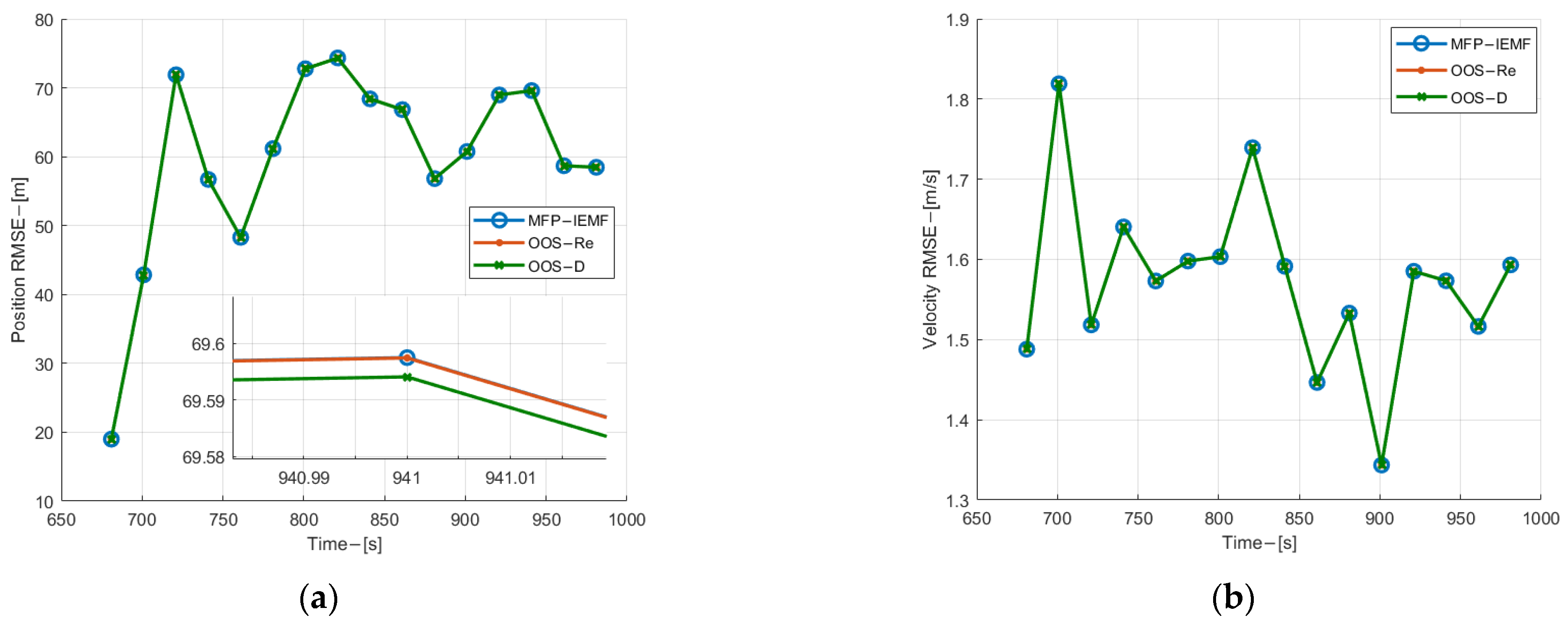
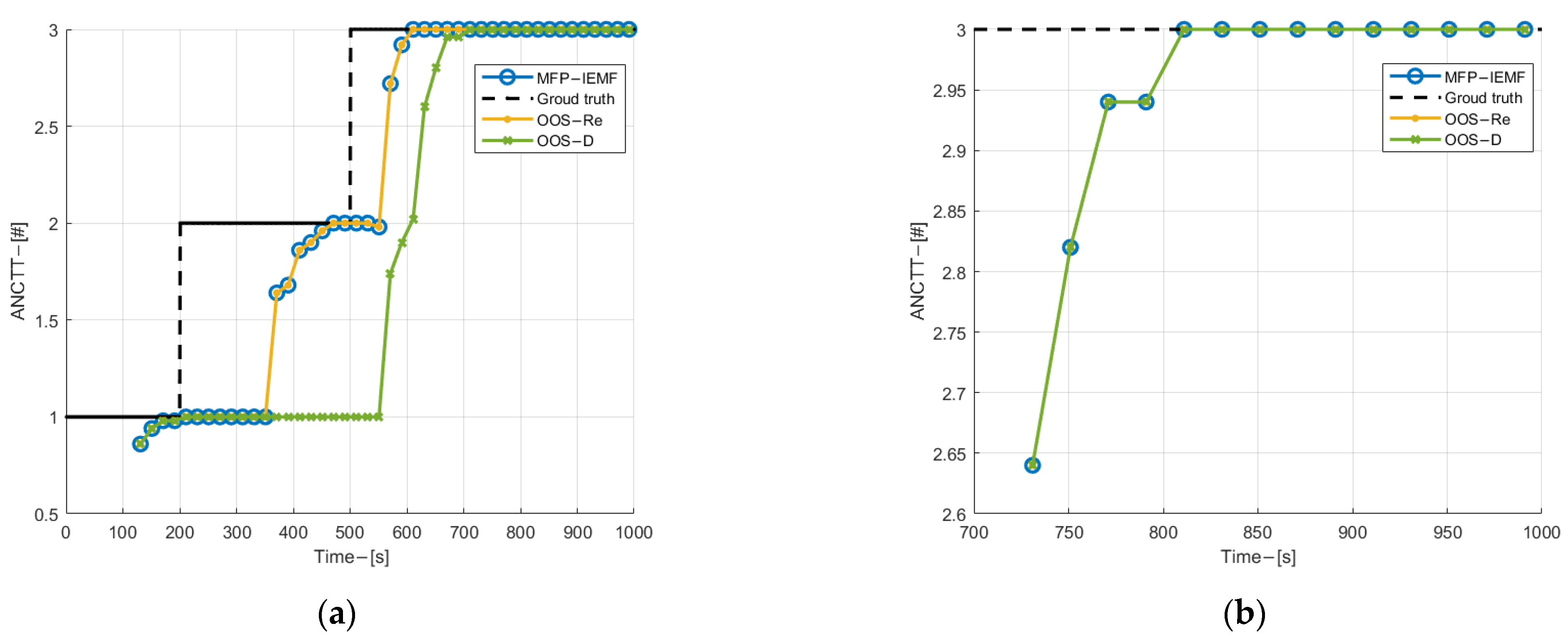
5.2.1. Fundamental Case Study
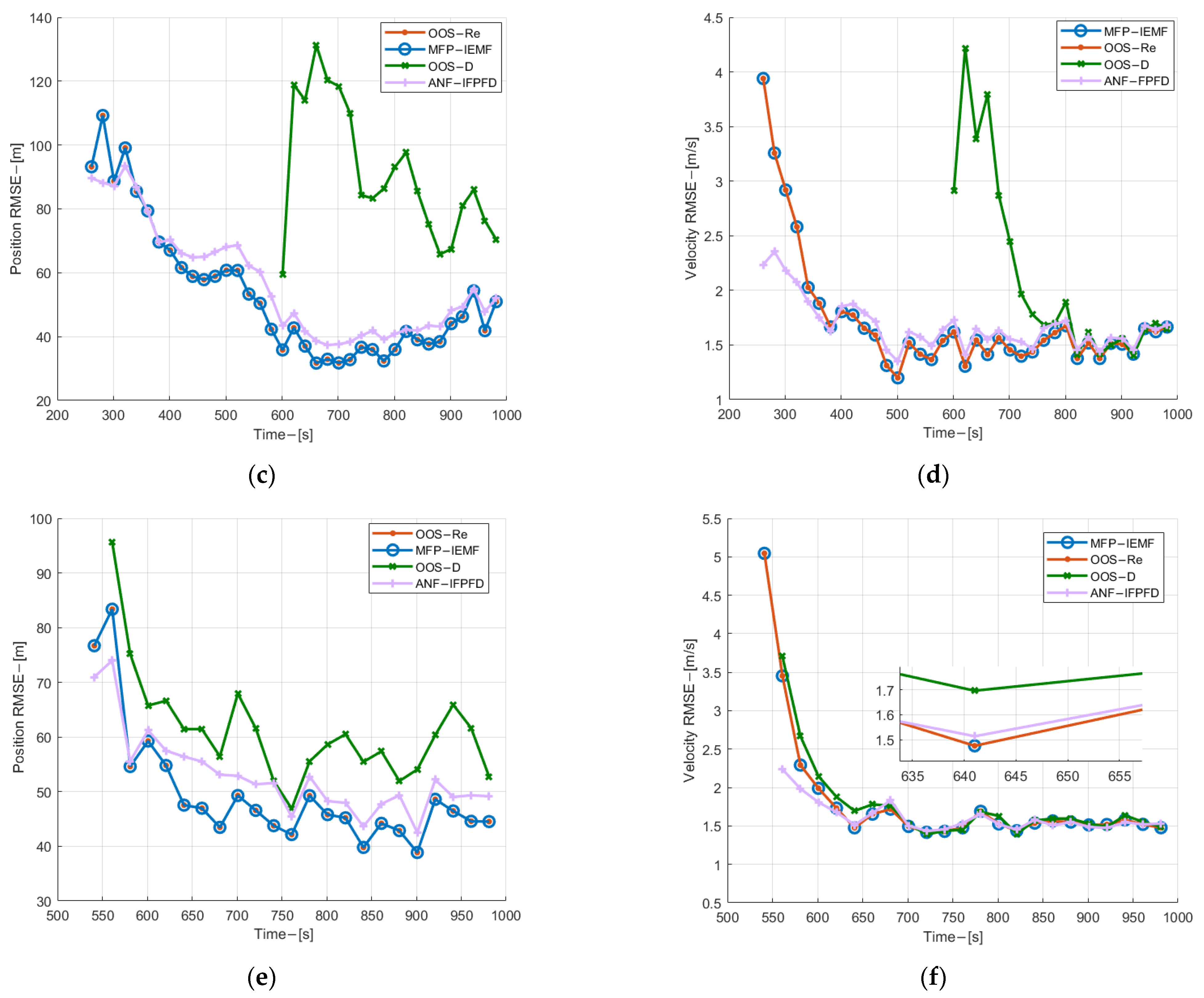
5.2.2. Case Study on Different Delay Steps
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Liu, Y.; Xu, S.; Zhu, T.; Wang, T. Application of Multi-Source Data Fusion Method in Updating Topography and Estimating Sedimentation of the Reservoir. Water 2020, 12, 3057. [Google Scholar] [CrossRef]
- Gaida, T.C.; Mohammadloo, T.H.; Snellen, M.; Simons, D.G. Mapping the seabed and shallow subsurface with multi-frequency multibeam echosounders. Remote Sens. 2020, 12, 52. [Google Scholar] [CrossRef] [Green Version]
- Tsao, S.L.; Tian, W.M.; Shen, C.Y.; Chen, T.Y. Benthic fish behavior characterization with a mechanically scanned imaging sonar. Aquac. Eng. 2019, 84, 1–11. [Google Scholar] [CrossRef]
- Maki, T.; Horimoto, H.; Ishihara, T.; Kofuji, K. Tracking a sea turtle by an AUV with a multibeam imaging sonar: Toward robotic observation of marine life. Int. J. Control. Autom. Syst. 2020, 18, 597–604. [Google Scholar] [CrossRef]
- Luo, X.B.; Xu, D.M.; Hu, J.J.; Hu, X.M. Application research of 3d imaging sonar system in salvage process. Appl. Mech. Mater. 2014, 643, 279–282. [Google Scholar]
- Reggiannini, M.; Salvetti, O. Seafloor analysis and understanding for underwater archeology. J. Cult. Herit. 2017, 24, 147–156. [Google Scholar] [CrossRef]
- Lu, S.; Chen, Y.; Chen, F.; Ding, F.; Li, R. Cognitive Continuous Tracking Algorithm for Centralized Multistatic Sonar Systems. In Proceedings of the 2021 OES China Ocean Acoustics (COA), Harbin, China, 14–17 July 2021. [Google Scholar]
- Liu, X.; Kang, F.J.; Zhang, L.F. The research of multi-sonar data fusion in naval fleet. Fire Control. Command. Control. 2007, 32, 40–43. [Google Scholar]
- Van Vossen, R.; Beerens, S.; van der Spek, E. Anti-submarine warfare with continuously active sonar. Sea Technol. 2011, 52, 33. [Google Scholar]
- Meyer, F.; Hinz, S.; Laika, A.; Weihing, D.; Bamler, R. Performance analysis of the TerraSAR-X Traffic monitoring concept. ISPRS J. Photogramm. Remote Sens. 2006, 61, 225–242. [Google Scholar] [CrossRef]
- Koyama, C.N.; Gokon, H.; Jimbo, M.; Koshimura, S.; Sato, M. Disaster debris estimation using high-resolution polarimetric stereo-SAR. ISPRS J. Photogramm. Remote Sens. 2016, 120, 84–98. [Google Scholar] [CrossRef] [Green Version]
- Petit, M.; Stretta, J.-M.; Farrugio, H.; Wadsworth, A. Synthetic aperture radar imaging of sea surface life and fishing activities. Geosci. Remote Sens. IEEE Trans. 1992, 30, 1085–1089. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Zhang, X.; Liu, C.; Shi, J.; Wei, S.; Ahmad, I.; Zhan, X.; Zhou, Y.; Pan, D.; Li, J.; et al. Balance learning for ship detection from synthetic aperture radar remote sensing imagery. ISPRS J. Photogramm. Remote Sens. 2021, 182, 190–207. [Google Scholar] [CrossRef]
- Xie, P.; Kang, F.; Wang, S. Research for Underwater Target Tracking by Using Multi-Sonar. In Proceedings of the 2010 3rd International Congress on Image and Signal Processing, Yantai, China, 16–18 October 2010. [Google Scholar]
- Coraluppi, S.; Carthel, C. Distributed tracking in multistatic sonar. IEEE Trans. Aerosp. Electron. Syst. 2005, 41, 1138–1147. [Google Scholar] [CrossRef]
- Ullah, I.; Song, T.L.; Kirubarajan, T. Active vehicle protection using angle and time-to-go information from high-resolution infrared sensors. Opt. Eng. 2015, 54, 053110. [Google Scholar] [CrossRef]
- Pao, L.Y. Centralized multisensor fusion algorithms for tracking applications. Control. Eng. Pract. 1994, 2, 875–887. [Google Scholar] [CrossRef]
- Bakr, M.A.; Lee, S. Distributed multisensor data fusion under unknown correlation and data inconsistency. Sensors 2017, 17, 2472. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Seget, K.; Schulz, A.; Heute, U. Multi-Hypothesis Tracking and Fusion Techniques for Multistatic Active Sonar Systems. In Proceedings of the 2010 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010. [Google Scholar]
- Berntorp, K.; Robertsson, A. Rao–Blackwellized particle filters with out-of-sequence measurement processing. IEEE Trans. Signal Processing 2014, 62, 6454–6467. [Google Scholar] [CrossRef] [Green Version]
- Ullah, I.; Qureshi, M.B.; Khan, U.; Memon, S.A.; Shi, Y.; Peng, D. Multisensor-based target-tracking algorithm with out-of-sequence-measurements in cluttered environments. Sensors 2018, 18, 4043. [Google Scholar] [CrossRef] [Green Version]
- Bar-Shalom, Y. Update with out-of-sequence measurements in tracking: Exact solution. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 769–777. [Google Scholar] [CrossRef]
- Mallick, M.; Coraluppi, S.; Carthel, C. Advances in Asynchronous and Decentralized Estimation. In Proceedings of the 2001 IEEE Aerospace Conference Proceedings, Big Sky, MT, USA, 10–17 March 2001. [Google Scholar]
- Bar-Shalom, Y.; Mallick, M.; Chen, H.; Washburn, R. One-Step Solution for the General out-of-Sequence-Measurement Problem in Tracking. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 9–16 March 2002. [Google Scholar]
- Rheaume, F.; Benaskeur, A.R. Forward Prediction-Based Approach to Target-Tracking with out-of-Sequence Measurements. In Proceedings of the 2008 47th IEEE Conference on Decision and Control, Cancun, Mexico, 9–11 December 2008. [Google Scholar]
- Challa, S.; Evans, R.J.; Wang, X. A Bayesian solution and its approximations to out-of-sequence measurement problems. Inf. Fusion 2003, 4, 185–199. [Google Scholar] [CrossRef]
- Shi, Y.; Choi, J.W.; Xu, L.; Kim, H.J.; Ullah, I.; Khan, U. Distributed Target Tracking in Challenging Environments Using Multiple Asynchronous Bearing-Only Sensors. Sensors 2020, 20, 2671. [Google Scholar] [CrossRef] [PubMed]
- Challa, S.; Legg, J.A. Track-to-Track Fusion of out-of-Sequence Tracks. In Proceedings of the International Conference on Information Fusion, Annapolis, MD, USA, 8–11 July 2002. [Google Scholar]
- Mallick, M.; Schmidt, S.; Pao, L.Y.; Chang, K.C. Out-of-Sequence Track Filtering Using the Decorrelated Pseudo-Measurement Approach. In Proceedings of the Signal and Data Processing of Small Targets 2004, Orlando, FL, USA, 12–16 April 2004. [Google Scholar]
- Novoselsky, A.; Sklarz, S.E.; Dorfan, M. Track to Track Fusion Using out-of-Sequence Track Information. In Proceedings of the 2007 10th International Conference on Information Fusion, Quebec, QC, Canada, 9–12 July 2007. [Google Scholar]
- Tian, X.; Bar-Shalom, Y. On Algorithms for Asynchronous Track-to-Track Fusion. In Proceedings of the 2010 13th International Conference on Information Fusion, Edinburgh, UK, 26–29 July 2010. [Google Scholar]
- Duraisamy, B.; Schwarz, T. Track to Track Fusion Incorporating out of Sequence Track Based on Information Matrix Fusion. In Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015. [Google Scholar]
- Shi, Y.; Ullah, I.; Song, T.L.; Choi, J.W. Multisensor distributed out-of-sequence-tracks fusion with track origin uncertainty. Aerosp. Sci. Technol. 2020, 106, 106226. [Google Scholar] [CrossRef]
- Blackman, S.; Popoli, R. Design and Analysis of Modern Tracking Systems; Artech House: Norwood, MA, USA, 1999. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MFP-IEMF | ANF-IFPFD | OOS-D | OOS-Re | |
|---|---|---|---|---|
| Averaged fusion time per experiment (s) | 11.7958 | 11.3148 | 10.8183 | 1014.2796 |
| Real-time or delayed fusion | real-time | real-time | real-time | delayed |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, R.; Li, T.; Memon, I.; Shi, Y.; Ullah, I.; Memon, S.A. Multi-Sonar Distributed Fusion for Target Detection and Tracking in Marine Environment. Sensors 2022, 22, 3335. https://doi.org/10.3390/s22093335
Chen R, Li T, Memon I, Shi Y, Ullah I, Memon SA. Multi-Sonar Distributed Fusion for Target Detection and Tracking in Marine Environment. Sensors. 2022; 22(9):3335. https://doi.org/10.3390/s22093335
Chicago/Turabian StyleChen, Roujie, Tingting Li, Imran Memon, Yifang Shi, Ihsan Ullah, and Sufyan Ali Memon. 2022. "Multi-Sonar Distributed Fusion for Target Detection and Tracking in Marine Environment" Sensors 22, no. 9: 3335. https://doi.org/10.3390/s22093335
APA StyleChen, R., Li, T., Memon, I., Shi, Y., Ullah, I., & Memon, S. A. (2022). Multi-Sonar Distributed Fusion for Target Detection and Tracking in Marine Environment. Sensors, 22(9), 3335. https://doi.org/10.3390/s22093335