
Transient Detection of Rotor Asymmetries in Squirrel-Cage Induction Motors Using a Model-Based Tacholess Order Tracking

 , , , and
, , , and
Abstract
:1. Introduction
2. Observer Design from a Reduced Amount of Information
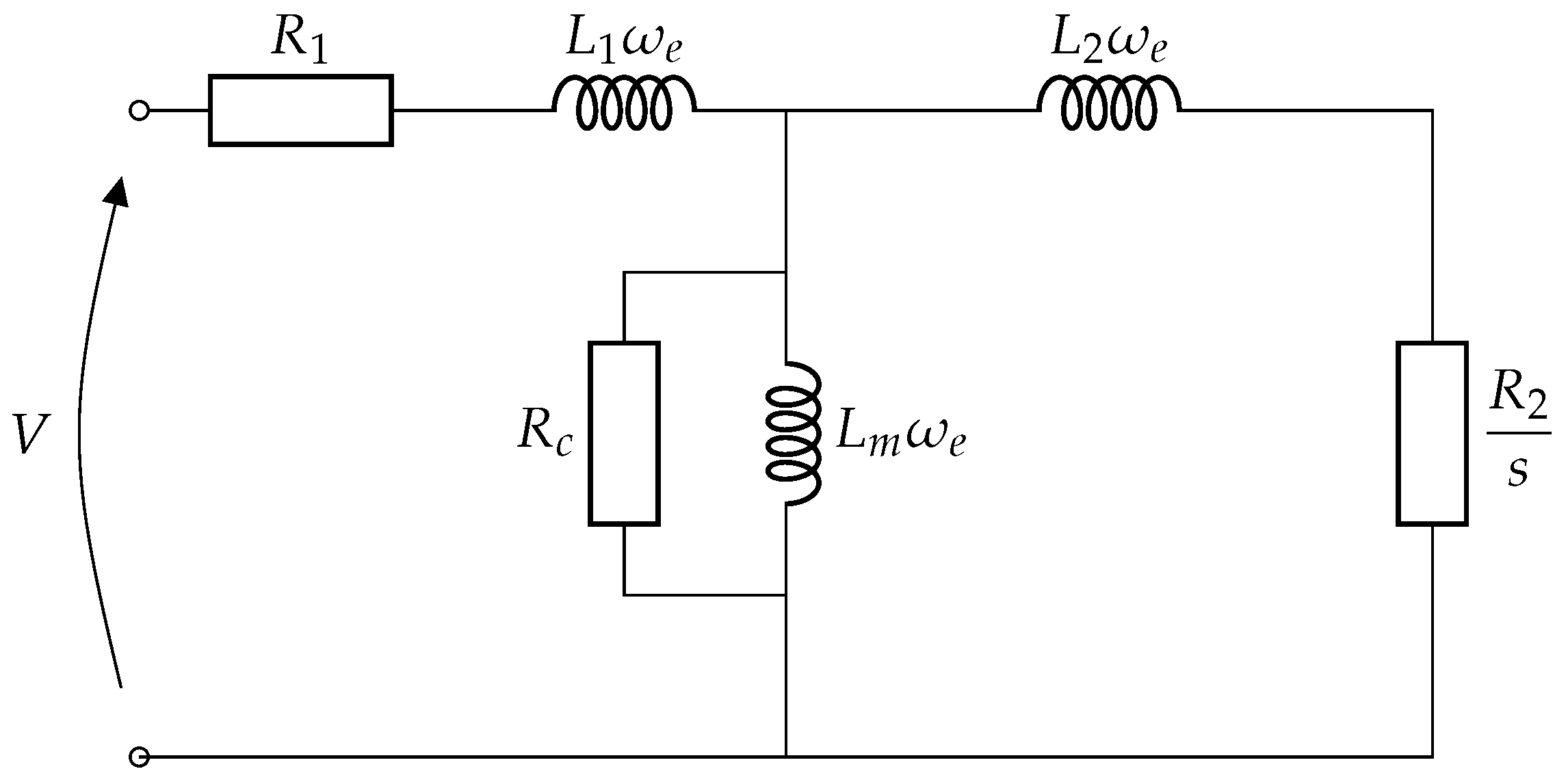
2.1. Model Estimation in Steady State
- : supply electrical angular frequency;
- : stator winding resistance;
- : leakage inductance of a stator winding;
- : resistance modeling iron losses;
- : magnetizing inductance;
- : resistance of an equivalent rotor winding transferred to the stator;
- : leakage inductance of a rotor winding transferred to the stator;
- : synchronism frequency with and p the number of pole pairs.
- The motor nameplate (NP), which provides the mechanical power , the line voltage , the current , the frequency , the speed , the power factor , the torque and the nominal efficiency of the machine;
- Additional manufacturer data such as the maximum torque , the starting torque and the starting current , the motor code and class in the NEMA standard (National Electrical Manufacturers Association), and additional operating points for power factor and efficiency (100%, 50%, and 25% of load).
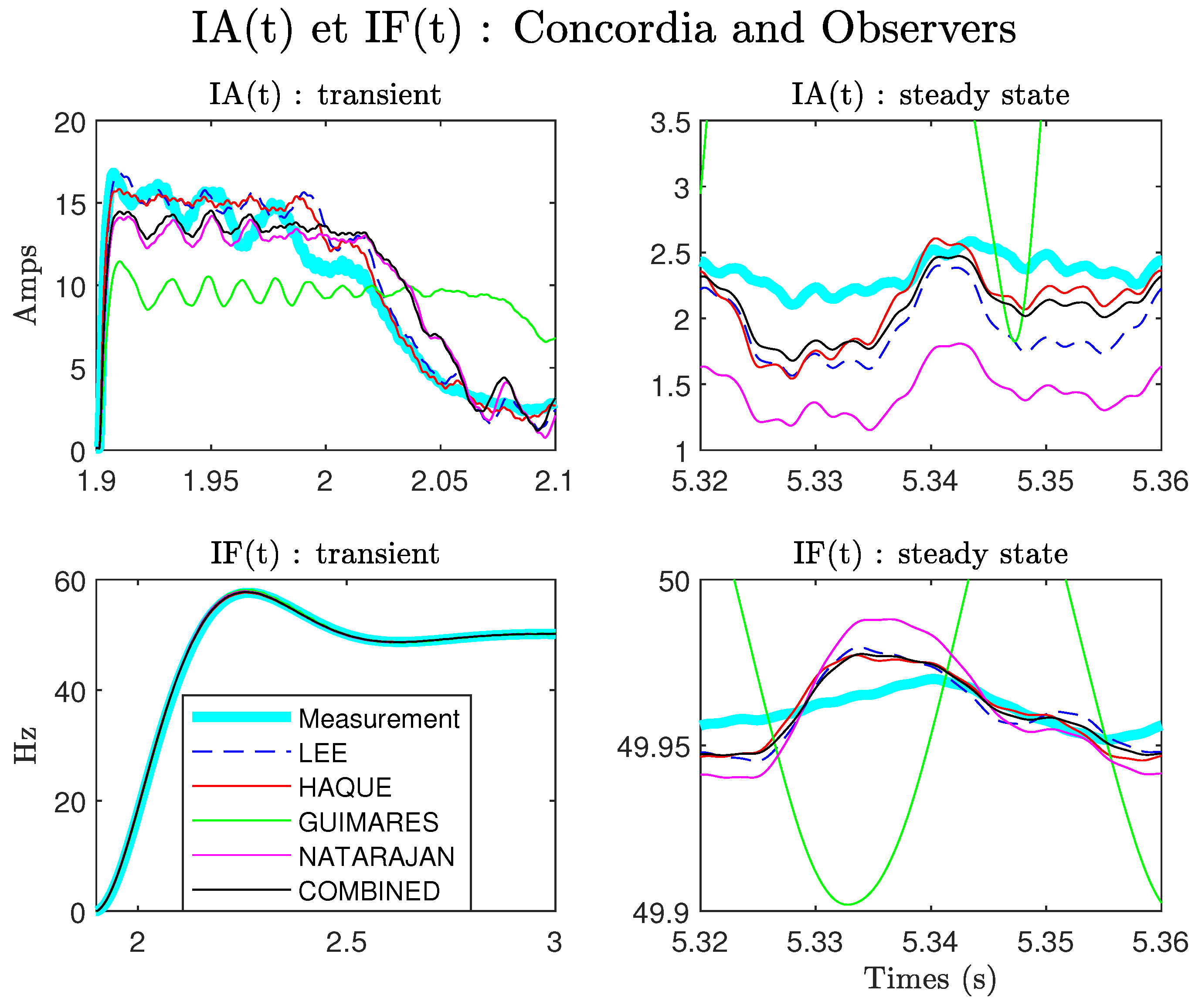
- estimation with the Guimarães method;
- estimation with the Natarajan-Misra method;
- , estimation with Haque’s method;
- , estimation with Amaral’s method;
- constant losses estimation with the Lee method.
2.2. From Steady State to Dynamic Model
- , , : stator voltages, currents and fluxes;
- , : rotor currents and fluxes;
- : stator resistance;
- : rotor resistance;
- : cyclic stator inductance;
- : rotor cyclic inductance;
- : , maximum mutual inductance between a stator phase and a rotor phase;
- : mechanical angular frequency;
- : angular frequency of the frame in which the equations are expressed.
- : the frame is fixed on the field rotating at the synchronism angular frequency. This frame is commonly called Park’s frame and is used in vector control. In this frame of reference, the electric and magnetic quantities are continuous.
- : the frame is set on stator phase {a}. This frame is commonly called the Concordia frame and is often used in observer synthesis. In this frame, the electrical and magnetic quantities are sinusoidal.
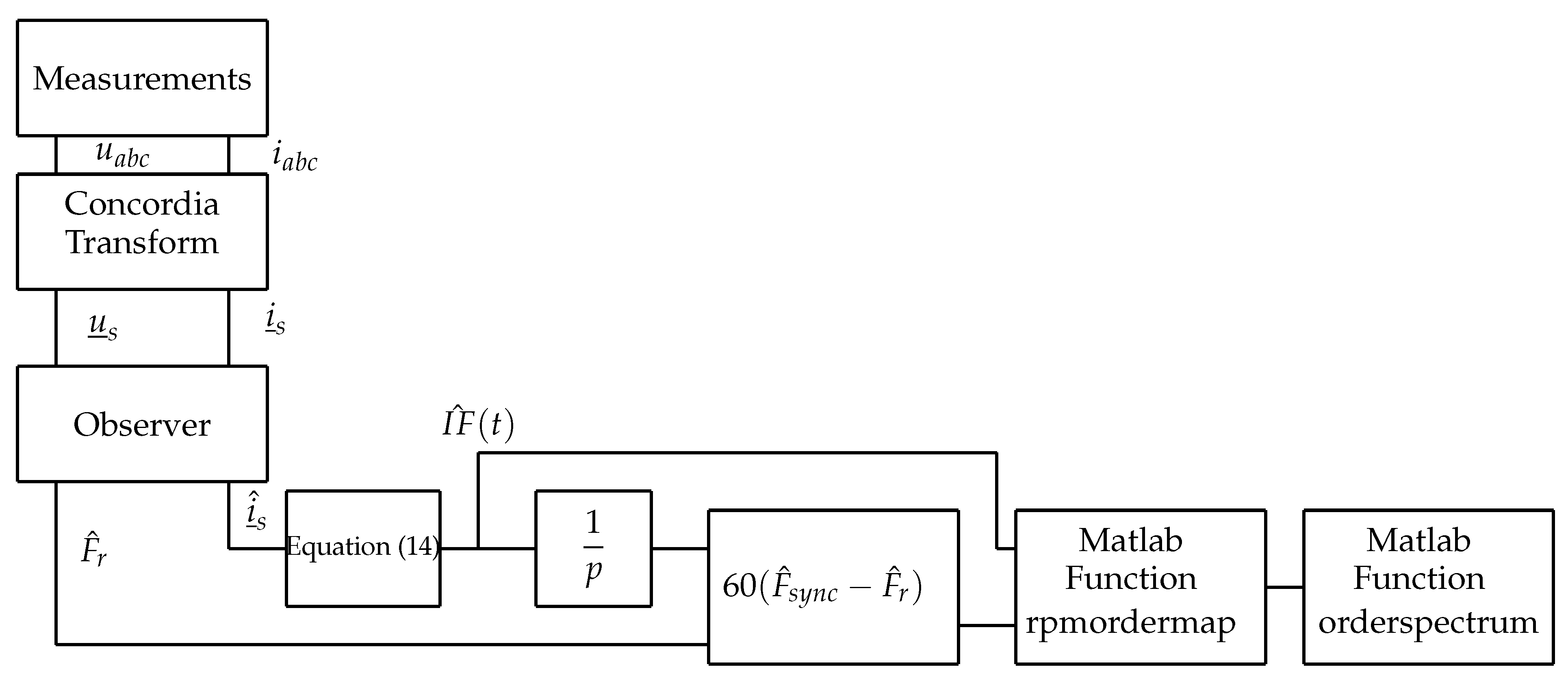
2.3. Adaptive Observer
- ,
- : leakage coefficient;
- : rotor time constant;
- : mechanical motor angular frequency.
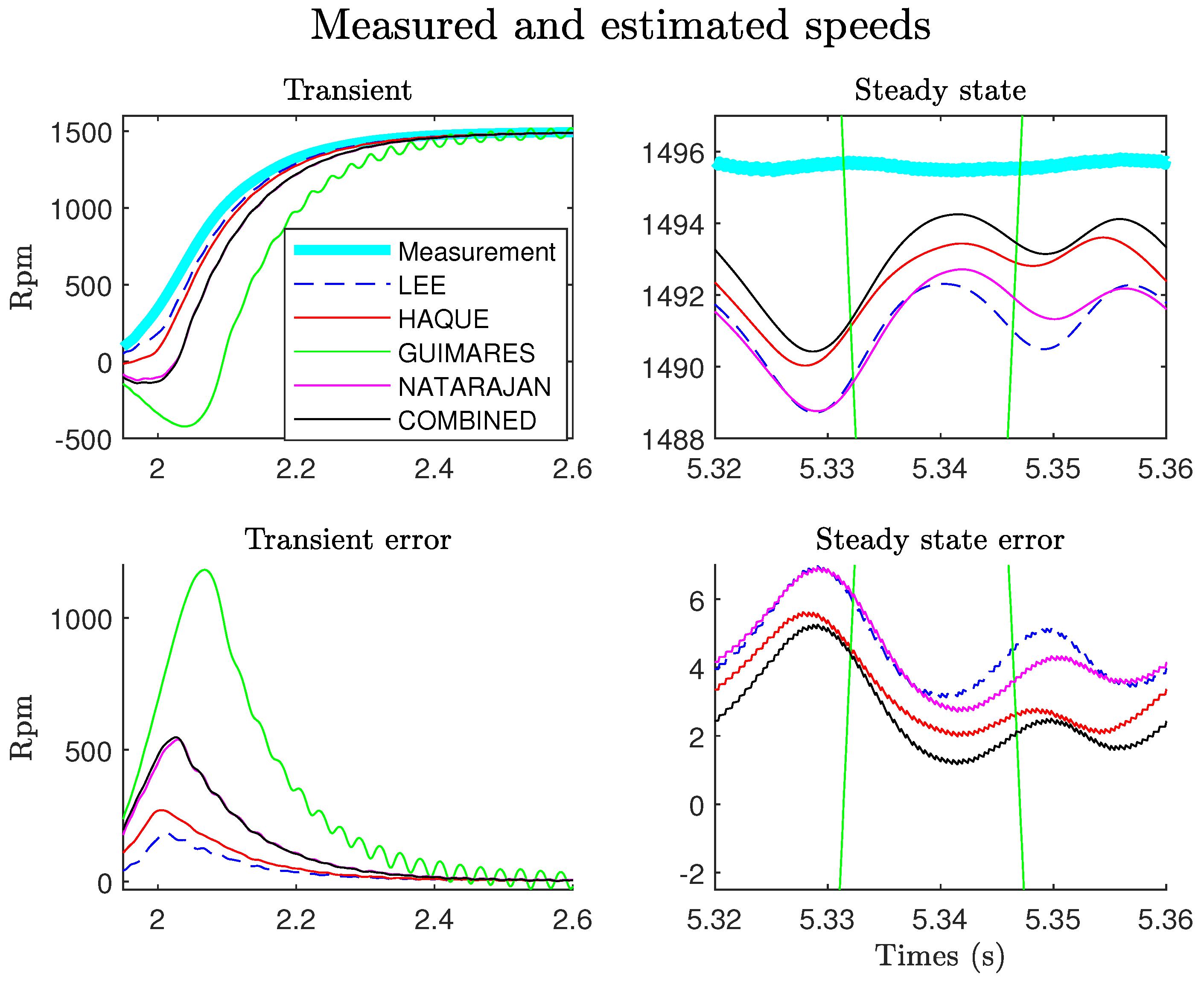
2.4. Experimental Model Selection
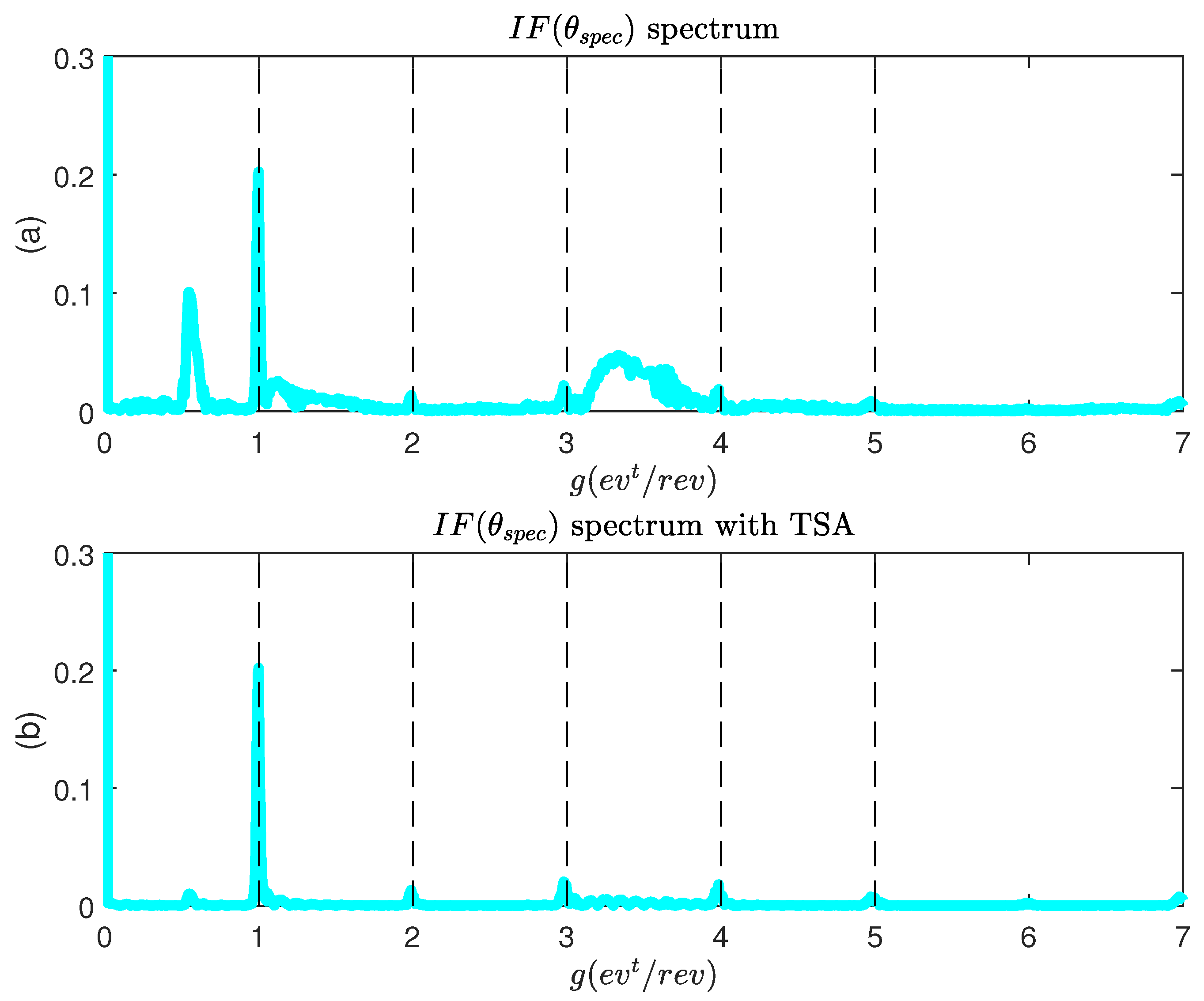
3. Specific Angular Re-Sampling for Rotor Asymmetry Monitoring
3.1. Angular Re-Sampling with Mechanical Position
3.2. Design of a Specific Angle for Fault Monitoring
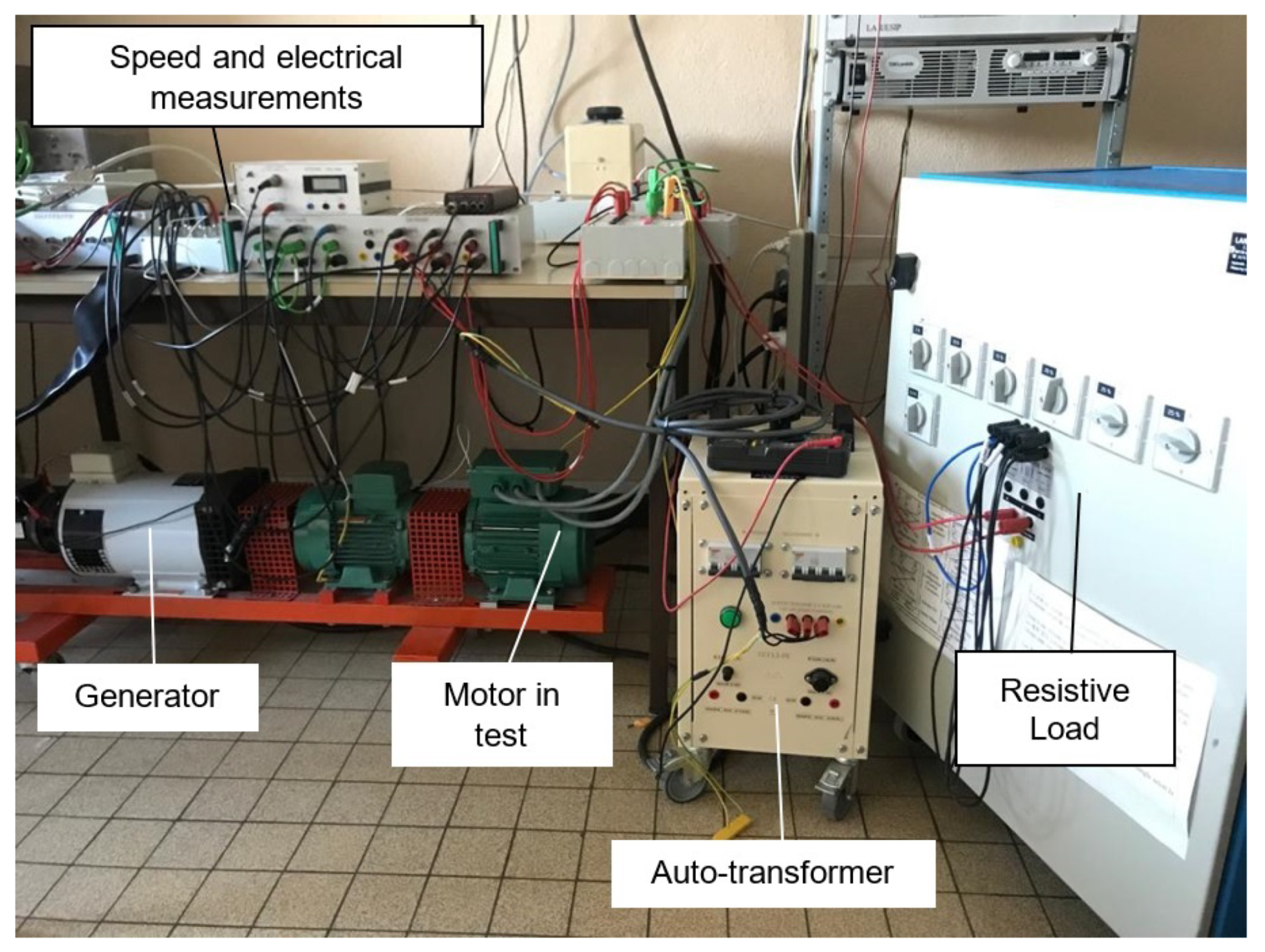
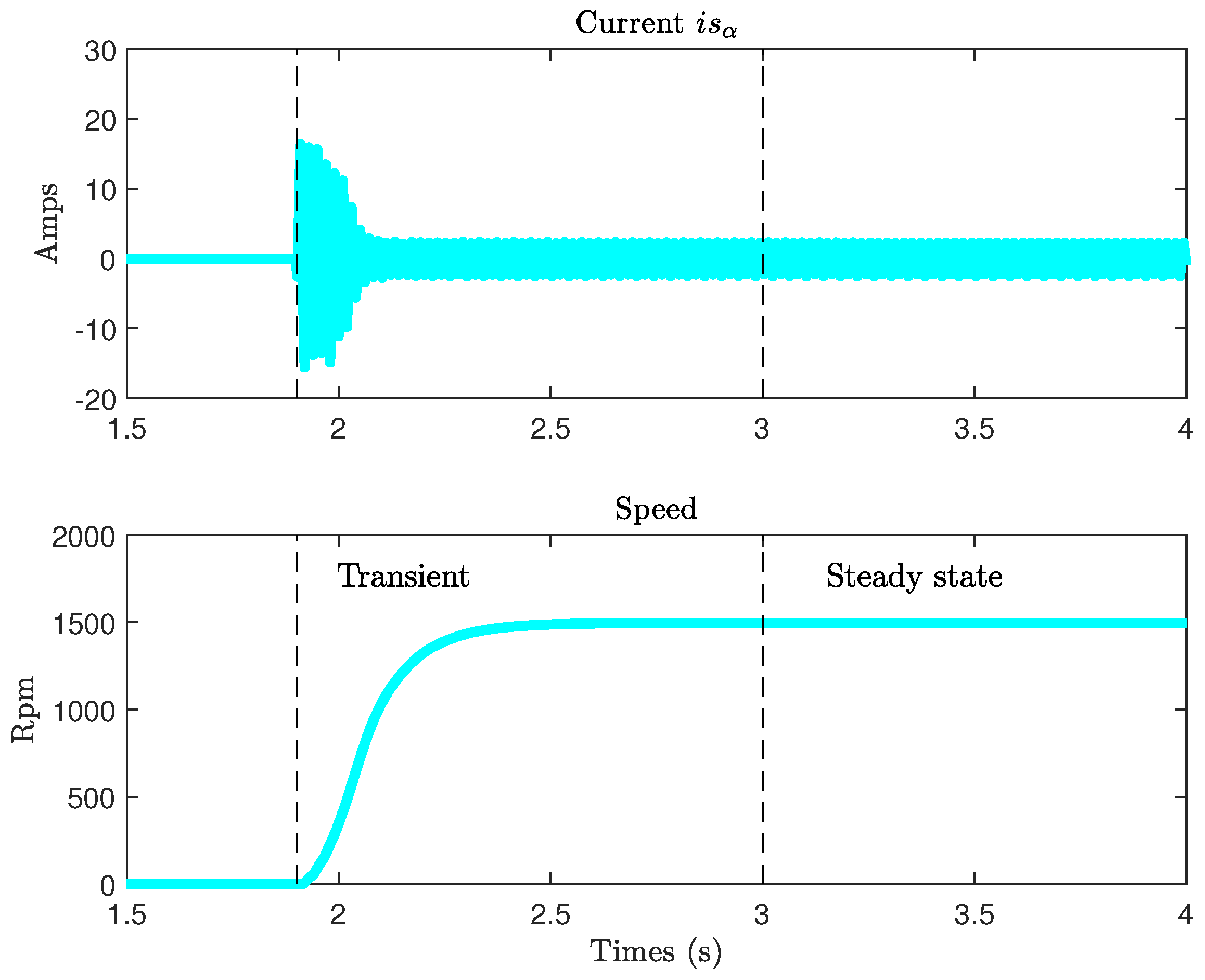
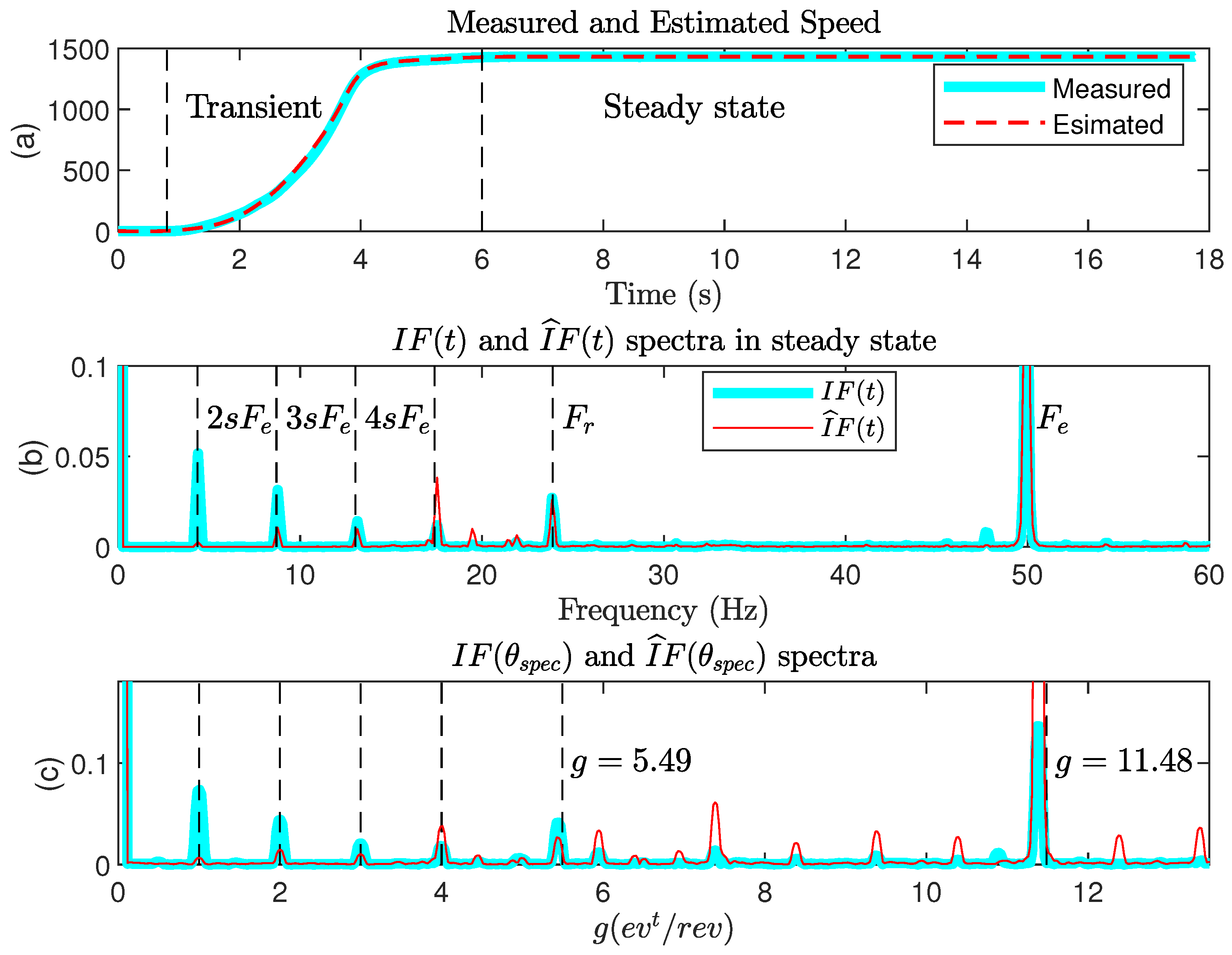
4. Experimental Results
- the signal to be analyzed: .
- the time sampling frequency: kHz.
- the motor speed expressed in rpm: we adapt this function to use it with our specific angle by entering the speed . This choice corresponds to choosing a reference frame rotating at the frequency of the rotor currents.
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Riera-Guasp, M.; Antonino-Daviu, J.; Pineda-Sanchez, M.; Puche-Panadero, R.; Perez-Cruz, J. A General Approach for the Transient Detection of Slip-Dependent Fault Components Based on the Discrete Wavelet Transform. IEEE Trans. Ind. Electron. 2008, 55, 4167–4180. [Google Scholar] [CrossRef]
- Lin, J.; Zhao, M. A review and strategy for the diagnosis of speed-varying machinery. In Proceedings of the 2014 International Conference on Prognostics and Health Management, Zhangjiajhe, China, 24–27 August 2014; pp. 1–9. [Google Scholar]
- Qiao, W.; Lu, D. A Survey on Wind Turbine Condition Monitoring and Fault Diagnosis—Part II: Signals and Signal Processing Methods. IEEE Trans. Ind. Electron. 2015, 62, 6546–6557. [Google Scholar] [CrossRef]
- Fernandez-Cavero, V.; Morinigo-Sotelo, D.; Duque-Perez, O.; Pons-Llinares, J. Fault detection in inverter-fed induction motors in transient regime: State of the art. In Proceedings of the 2015 IEEE 10th International Symposium on Diagnostics for Electrical Machines, Power Electronics and Drives (SDEMPED), Guarda, Portugal, 1–4 September 2015. [Google Scholar] [CrossRef]
- Antonino-Daviu, J. Electrical Monitoring under Transient Conditions: A New Paradigm in Electric Motors Predictive Maintenance. Appl. Sci. 2020, 10, 6137. [Google Scholar] [CrossRef]
- Sapena-Bano, A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Roger-Folch, J.; Riera-Guasp, M. Harmonic Order Tracking Analysis: A Novel Method for Fault Diagnosis in Induction Machines. IEEE Trans. Energy Convers. 2015, 30, 833–841. [Google Scholar] [CrossRef] [Green Version]
- Sapena-Bano, A.; Burriel-Valencia, J.; Pineda-Sanchez, M.; Puche-Panadero, R.; Riera-Guasp, M. The Harmonic Order Tracking Analysis Method for the Fault Diagnosis in Induction Motors Under Time-Varying Conditions. IEEE Trans. Energy Convers. 2017, 32, 244–256. [Google Scholar] [CrossRef] [Green Version]
- Akar, M. Detection of a static eccentricity fault in a closed loop driven induction motor by using the angular domain order tracking analysis method. Mech. Syst. Signal Process. 2013, 34, 173–182. [Google Scholar] [CrossRef]
- Lu, S.; Yan, R.; Liu, Y.; Wang, Q. Tacholess Speed Estimation in Order Tracking: A Review with Application to Rotating Machine Fault Diagnosis. IEEE Trans. Instrum. Meas. 2019, 68, 2315–2332. [Google Scholar] [CrossRef]
- Holtz, J. Speed estimation and sensorless control of AC drives. In Proceedings of the IECON ’93—19th Annual Conference of IEEE Industrial Electronics, Maui, HI, USA, 15–19 November 1993; Volume 2, pp. 649–654. [Google Scholar] [CrossRef]
- Elloumi, M.; Ben-Brahim, L.; Al-Hamadi, M. Survey of speed sensorless controls for IM drives. In Proceedings of the 24th Annual Conference of the IEEE Industrial Electronics Society (Cat. No.98CH36200), Aachen, Germany, 31 August–4 September 1998; Volume 2, pp. 1018–1023. [Google Scholar] [CrossRef]
- Randall, R.B. A History of Cepstrum Analysis and Its Application to Mechanical Problems. Mech. Syst. Signal Process. 2017, 97, 3–19. [Google Scholar] [CrossRef]
- Bodson, M.; Chiasson, J. A comparison of sensorless speed estimation methods for induction motor control. In Proceedings of the 2002 American Control Conference (IEEE Cat. No.CH37301), Anchorage, AK, USA, 8–10 May 2002. [Google Scholar] [CrossRef]
- Gallegos, M.A.; Alvarez, R.; Nunez, C.A. A survey on speed estimation for ensorless control of induction motors. In Proceedings of the 2006 IEEE International Power Electronics Congress, Puebla, Mexico, 16–18 October 2006; pp. 1–6. [Google Scholar] [CrossRef]
- Holtz, J. Sensorless Control of Induction Machines—With or without Signal Injection? IEEE Trans. Ind. Electron. 2006, 53, 7–30. [Google Scholar] [CrossRef] [Green Version]
- Kubota, H.; Matsuse, K.; Nakano, T. DSP-based speed adaptive flux observer of induction motor. IEEE Trans. Ind. Appl. 1993, 29, 344–348. [Google Scholar] [CrossRef]
- Hinkkanen, M.; Luomi, J. Stabilization of Regenerating-Mode Operation in Sensorless Induction Motor Drives by Full-Order Flux Observer Design. IEEE Trans. Ind. Electron. 2004, 51, 1318–1328. [Google Scholar] [CrossRef] [Green Version]
- Korzonek, M.; Tarchala, G.; Orlowska-Kowalska, T. A review on MRAS-type speed estimators for reliable and efficient induction motor drives. ISA Trans. 2019, 93, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Orlowska-Kowalska, T.; Korzonek, M.; Tarchala, G. Performance Analysis of Speed-Sensorless Induction Motor Drive Using Discrete Current-Error Based MRAS Estimators. Energies 2020, 13, 2595. [Google Scholar] [CrossRef]
- Toliyat, H.; Levi, E.; Raina, M. A review of RFO induction motor parameter estimation techniques. IEEE Trans. Energy Convers. 2003, 18, 271–283. [Google Scholar] [CrossRef]
- Odhano, S.A.; Pescetto, P.; Awan, H.A.A.; Hinkkanen, M.; Pellegrino, G.; Bojoi, R. Parameter Identification and Self-Commissioning in AC Motor Drives: A Technology Status Review. IEEE Trans. Power Electron. 2019, 34, 3603–3614. [Google Scholar] [CrossRef] [Green Version]
- Tang, J.; Yang, Y.; Blaabjerg, F.; Chen, J.; Diao, L.; Liu, Z. Parameter Identification of Inverter-Fed Induction Motors: A Review. Energies 2018, 11, 2194. [Google Scholar] [CrossRef] [Green Version]
- Natarajan, R.; Misra, V. Parameter estimation of induction motors using a spreadsheet program on a personal computer. Electr. Power Syst. Res. 1989, 16, 157–164. [Google Scholar] [CrossRef]
- Haque, M.H. Determination of NEMA Design Induction Motor Parameters from Manufacturer Data. IEEE Trans. Energy Convers. 2008, 23, 997–1004. [Google Scholar] [CrossRef]
- Lee, K.; Frank, S.; Sen, P.K.; Polese, L.G.; Alahmad, M.; Waters, C. Estimation of induction motor equivalent circuit parameters from nameplate data. In Proceedings of the 2012 North American Power Symposium (NAPS), Champaign, IL, USA, 9–11 September 2012. [Google Scholar] [CrossRef]
- Guimaraes, J.M.C.; Bernardes, J.V.; Hermeto, A.E.; Bortoni, E.C. Determination of three-phase induction motors model parameters from catalog information. In Proceedings of the 2014 IEEE PES General Meeting/Conference & Exposition, National Harbor, MD, USA, 27–31 July 2014. [Google Scholar] [CrossRef]
- Wengerkievicz, C.A.; Elias, R.D.; Batistela, N.J.; Sadowski, N.; Kuo-Peng, P.; Lima, S.C.; Silva, P.A.; Beltrame, A.Y. Estimation of Three-Phase Induction Motor Equivalent Circuit Parameters from Manufacturer Catalog Data. J. Microwaves Optoelectron. Electromagn. Appl. 2017, 16, 90–107. [Google Scholar] [CrossRef] [Green Version]
- Amaral, G.F.V.; Baccarini, J.M.R.; Coelho, F.C.R.; Rabelo, L.M. A High Precision Method for Induction Machine Parameters Estimation From Manufacturer Data. IEEE Trans. Energy Convers. 2021, 36, 1226–1233. [Google Scholar] [CrossRef]
- Bachir, S.; Tnani, S.; Trigeassou, J.C.; Champenois, G. Diagnosis by parameter estimation of stator and rotor faults occurring in induction machines. IEEE Trans. Ind. Electron. 2006, 53, 963–973. [Google Scholar] [CrossRef]
- Blough, J. Improving the Analysis of Orerating Data on Rotative Automotive Components. Ph.D. Thesis, University of Cincinnati, Cincinnati, OH, USA, 1998. [Google Scholar]
- Thomson, W.; Culbert, I. Current Signature Analysis for Condition Monitoring of Cage Induction Motors: Industrial Application and Case Histories; IEEE Press: Piscataway, NJ, USA, 2017. [Google Scholar]
- Benbouzid, M. Bibliography on induction motors faults detection and diagnosis. IEEE Trans. Energy Convers. 1999, 14, 1065–1074. [Google Scholar] [CrossRef]
- El Bouchikhi, E.H.; Choqueuse, V.; Benbouzid, M.; Antonino-Daviu, J.A. Stator current demodulation for induction machine rotor faults diagnosis. In Proceedings of the 2014 First International Conference on Green Energy ICGE 2014, Sfax, Tunisia, 25–27 March 2014; pp. 176–181. [Google Scholar] [CrossRef] [Green Version]
- Bechhoefer, E.; Kingsley, M. A Review of Time Synchronous Average Algorithms. In Proceedings of the Annual Conference of the PHM Society, San Diego, CA, USA, 27 September–1 October 2009. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | NP | Torque | Current | NEMA | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 100 | 75 | 50 | 100 | 75 | 50 | CODE | CLASS | |||||
| Natarajan-Misra [23] | * | * | * | * | * | * | * | * | * | * | ||
| Lee [25] | * | * | * | * | ||||||||
| Haque [24] | * | * | * | * | * | * | * | |||||
| Guimarães [26] | * | * | * | * | * | * | * | * | * | * | ||
| Amaral [28] | * | * | * | * | * | * | * | * | ||||
| Method | ||||||
|---|---|---|---|---|---|---|
| Lee | 10.06 | 6.26 | 4.96 | 9.39 | 978.82 | 179.38 |
| Haque | 12.99 | 4.83 | 5.16 | 7.25 | 1619.1 | 153.76 |
| Guimarães | 13.18 | 3.23 | 4.05 | 31.88 | 1778.3 | 181.04 |
| Natarajan | 12.67 | 7.70 | 4.55 | 11.55 | 3985.43 | 232.96 |
| Amaral | 13.16 | 7.60 | 4.06 | 11.35 | 5289.16 | 160.96 |
| COMBINED | 13.18 | 7.60 | 4.55 | 11.35 | 1619.1 | 153.76 |
| Angular Domain | |||
|---|---|---|---|
| Name | Variable | Expression | Unit |
| Sampling period | - | rd | |
| Sampling frequency | Ev/rev | ||
| Number of samples | - | - | |
| FFT domain | Ev/rev | ||
| FFT resolution | Ev/rev | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Etien, E.; Doget, T.; Rambault, L.; Cauet, S.; Sakout, A.; Moreau, S. Transient Detection of Rotor Asymmetries in Squirrel-Cage Induction Motors Using a Model-Based Tacholess Order Tracking. Sensors 2022, 22, 3371. https://doi.org/10.3390/s22093371
Etien E, Doget T, Rambault L, Cauet S, Sakout A, Moreau S. Transient Detection of Rotor Asymmetries in Squirrel-Cage Induction Motors Using a Model-Based Tacholess Order Tracking. Sensors. 2022; 22(9):3371. https://doi.org/10.3390/s22093371
Chicago/Turabian StyleEtien, Erik, Thierry Doget, Laurent Rambault, Sebastien Cauet, Anas Sakout, and Sandrine Moreau. 2022. "Transient Detection of Rotor Asymmetries in Squirrel-Cage Induction Motors Using a Model-Based Tacholess Order Tracking" Sensors 22, no. 9: 3371. https://doi.org/10.3390/s22093371