
Unmanned Aerial Vehicle for Laser Based Biomedical Sensor Development and Examination of Device Trajectory


Abstract
:1. Introduction
- BCIs have been successfully incorporated into numerous areas of the world, with successful outcomes;
- Biomedical sensors have been evolving fast for the past few decades and BCIs are proving to be a very important tool for that;
- During the state of an emergency for elderly patients, it is mandatory to attend and provide medication at the earliest to the relevant person, for which UAVs can be utilized effectively;
- Considering the development of biomedical sensor for the targeted patients, a UAV is planned to be designed that can aid in the remote monitoring and first aid to the said individuals;
- The quadcopter designed in this work has presented a highly stable operation, which is mandatory for the supply of medical equipment from the hospital to the patient.
2. Related Work
3. Hardware Considerations
3.1. FRAME
3.2. Selection of Brush-Less DC (BLDC) Motor
- High effectiveness with noiseless tasks;
- Better speed versus torque attributes; and
- Quite high speed and longer life.
3.3. Electronic Speed Controller (ESC)
3.4. Power Input
3.5. Propellers
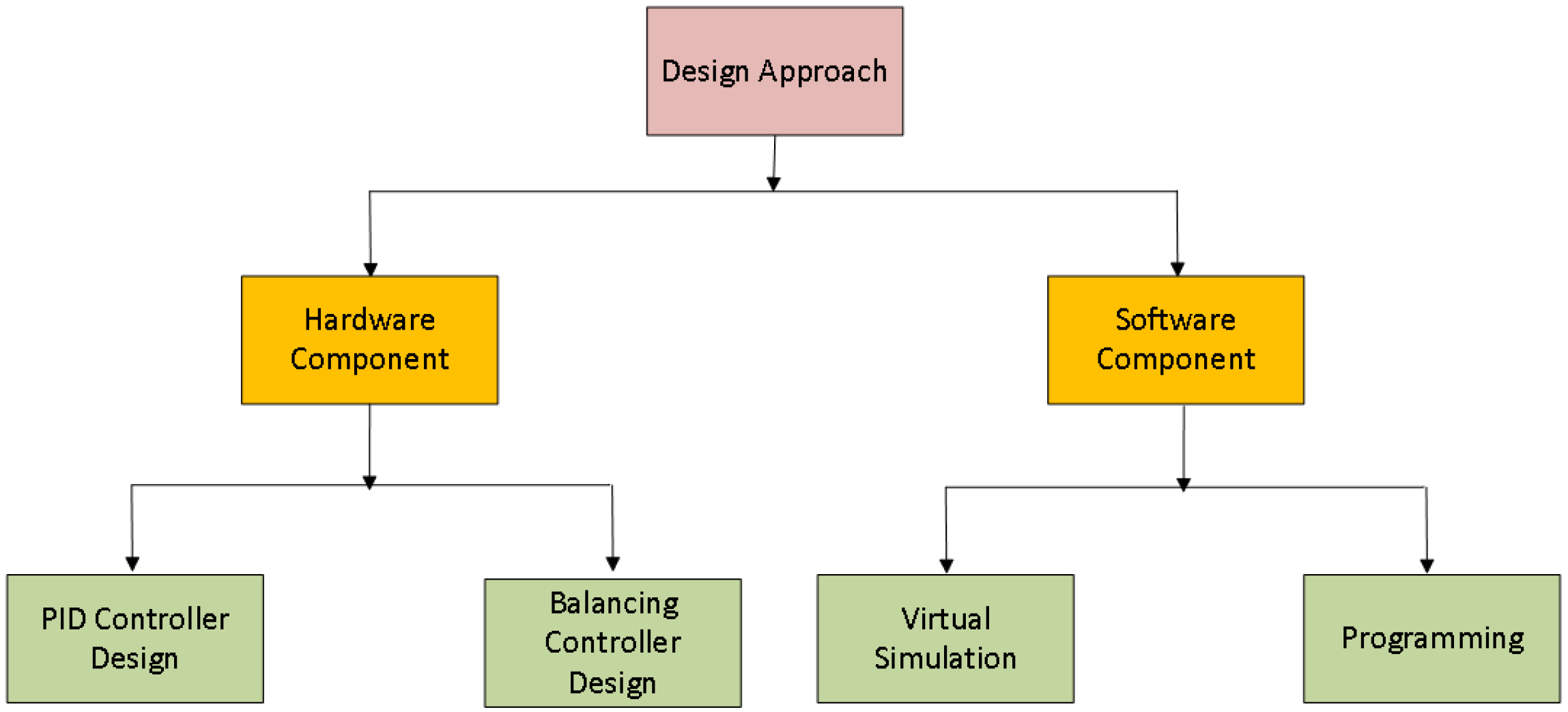
4. Design Methodology
4.1. Flowchart
4.2. Mathematical Modelling of Quad-Copter Dynamics
4.3. Brushless Dc Motor Model
5. Experimental Results
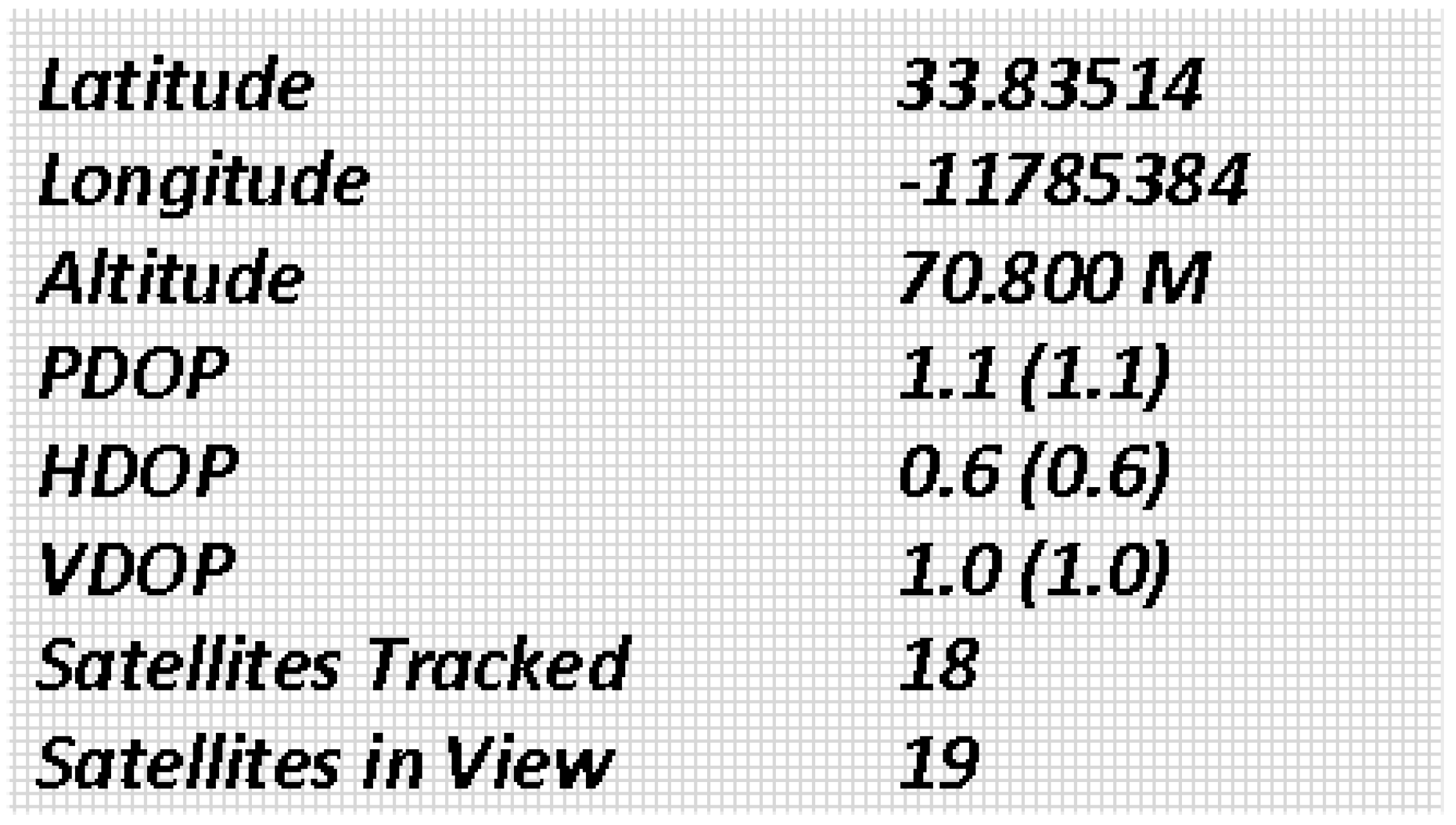
5.1. GPS Simulations
| Algorithm 1: Divide and conquer |
|
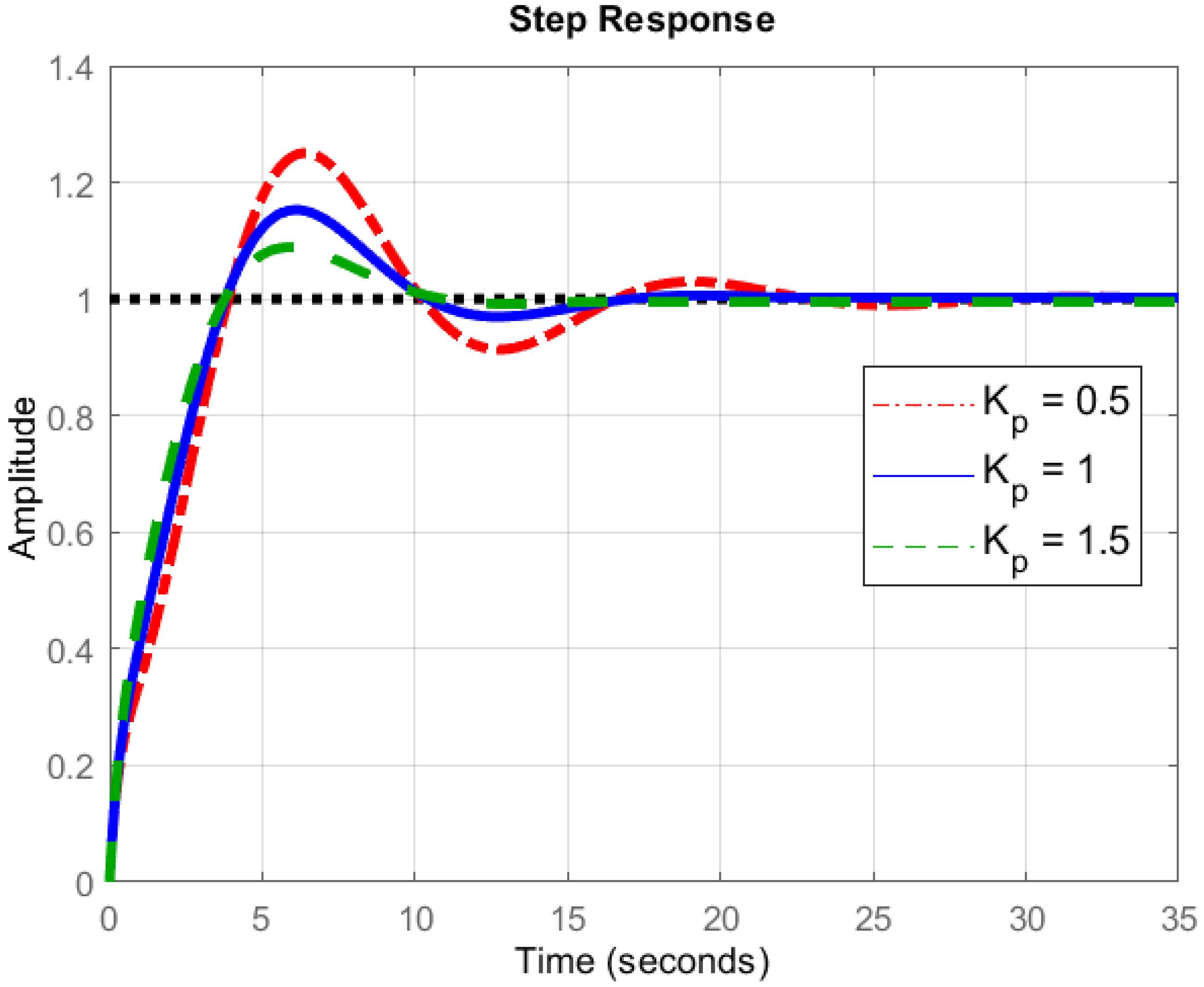
5.2. Proportional (P), Integral (I) and Derivative (D) Controller
5.2.1. Proportional Controller
5.2.2. Integral Controller
5.2.3. Derivative Controller
5.3. Trajectory of the Quad-Copter
- With the help of the vehicle’s camera, a device can be detected by the vehicle using RF-ID tag on the object. This means that the object can be picked up from the hospital’s store where it is located in a certain shelf, and transported to the patient in need;
- To test the efficiency of the drone’s activity, we place the central location of the drone within 300 m of the hospital’s store (at furthest);
- The medicines which have to be transported from the hospital to the patients come in various forms, and are sensitive to environmental variations. At this stage, the vehicle is used to transport only solid medicines and devices, as per recommendations of the physicians of the concerned hospital;
- Afterwards, the positions of the patients were set at random distances (displacements) from the hospital’s store, with the furthest one being at 1.5 km;
- The maximum weight which the vehicle can lift is 1.5 kg. The maximum speed without any load is 25 km/h, and that with the maximum weight aboard is 21.5 km/h;
- To carry out the experiments, specific permission was obtained from the local authority, as well as the hospital administration on weekends, as the work was not possible otherwise [43];
- The weather conditions need to be taken into consideration beforehand. Each measurement was taken on a sunny day, with maximum wind speed of 8 km/h, atmospheric pressure under 1025 hPa, precipitation under 0.5 cm, humidity under under 65%, and visibility under 10.35 km.
- In Figure 11, simulation results show resemblance with the theoretical ones, as well as the trajectory of the quad-copter. As soon as the device takes off, we see that the error between the simulation and trajectory is less than 1.75%, which increases to a maximum of 2.25% at two occasions, efficiently comparable to the nearest results [21]. First, it is the occasion when the device has consumed about one-third of the travel time. This might be due to the sudden increase in the wind speed at that moment. A similar moment is observed when the device is about to reach the destination. On average, the error value along the ordinate is 1.17%, which is acceptable for a quad-copter in similar designs [15,21].
- Regarding Figure 13, a similar trend is observed for the motion of the device along z-axis. The fluctuations in the trajectory are slightly more than those along the y-axis. This is mainly because of two reasons. First, the device is equipped with a sensor that checks its motion along y-axis, but not along the z-axis. After consultation with the local vendors, we could not find a particular solution at that moment. Second, when the air moves along any direction, it has an effect on the motion of the device. This matter was discussed with two pilots of helicopters, who agreed with our stance that the weight of this machine is much smaller than that of a normal helicopter, and this can have an effect on the motion along the z-axis. In addition, they said that this would supposedly not affect any objects loaded on the machine, unless they cross the weight limit of our quad-copter. The average error is found to be 1.28%, which is comparable to recent works on quad-copters with different applications [6,22].
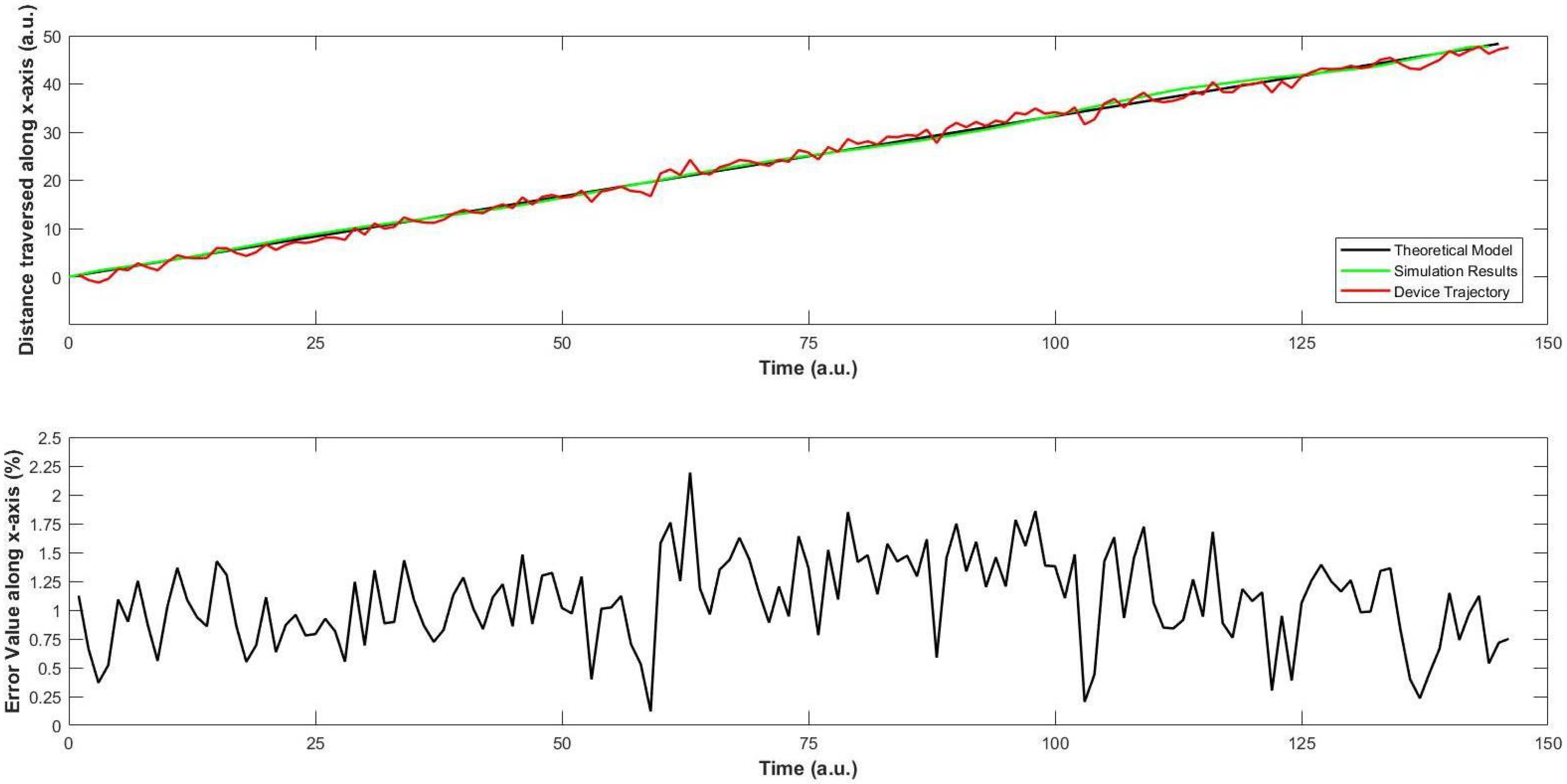
- Afterwards, the motion of the quad-copter along the x-axis is recorded and compared with the simulation results in Figure 12. When the device travels about half of its distance, some fluctuations are seen in this trajectory which can be interpreted as follows. The quad-copter leaves the store inside the hospital and flies over the ground along its way to the destination which is about half-way. On account of the open area, the air speed is slightly higher as there is less congestion. This again acts as a slight resistance for the device, on its way. Therefore, the device experiences some fluctuations at this point. The average error in the value is 1.04%, which is slightly less than for the y- and z-axes, and no correlated results could be found at this level [9,11].
- As per the trajectory profile of the device, it is important to note the stability during its movement. At this moment, it is observed that the overall results are within tolerable limits that are the primary focus of the biomedical application. For BCI to further accelerate its progress, the size of the device is important, as discussed in [8,9]. This becomes crucial as the medication becomes sensitive, which is not found in [15]. Although it is successful in imaging issues, the approach in [19] needs to be verified in different weather conditions, streamlining the identical repercussions. This becomes more interesting as there has been a focus on testing and implementation of BCI in virtual environments [21], and much remains to be done for the practical scenario, as we have approached here, with positive prospects in the future. This requires a deep investigation of the device in various dimensions on a continuous basis with BCI, an approach that has been attempted for the first time hitherto.
- In this manner, our focus in this work was to implement the controller for better control of the quadcopter that can be used to implement the real brain signals as in the literature [11,15,16,17,22]. The target is to implement it in a biomedical sensor for which various technical aspects have been investigated. The characteristics of the controller were discussed in detail for smooth functioning with the real brain signals that can aid in the prospective design of the said scheme in the future.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rezeika, A.; Benda, M.; Stawicki, P.; Gembler, F.; Saboor, A.; Volosyak, I. Brain–Computer Interface Spellers: A Review. Brain Sci. 2018, 8, 57. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gu, Z.; Chen, Z.; Zhang, J.; Zhang, X.; Yu, Z.L. An Online Interactive Paradigm for P300 Brain-Computer Interface Speller. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 152–161. [Google Scholar] [CrossRef] [PubMed]
- Akram, F.; Han, S.M.; Kim, T.-S. An efficient word typing P300-BCI system using a modified T9 interface and random forest classifier. Comput. Biol. Med. 2015, 56, 30–36. [Google Scholar] [CrossRef] [PubMed]
- Khan, M.J.; Hong, M.J.; Hong, K.-S. Decoding of four movement directions using hybrid NIRS-EEG brain-computer interface. Front. Hum. Neurosci. 2014, 8, 244. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Pan, J.; Wang, F.; Yu, Z. A hybrid BCI system combining P300 and SSVEP and its application to wheelchair control. IEEE Trans. Biomed. Eng. 2013, 60, 3156–3166. [Google Scholar]
- Galána, F.; Nuttin, M.; Lew, E.; Ferrez, P.W.; Vanacker, G.; Philips, J.; Millánad, J.D.R. A brain-actuated wheelchair: Asynchronous and non-invasive Brain-computer interfaces for continuous control of robots. Clin. Neurophysiol. 2008, 119, 2159–2169. [Google Scholar] [CrossRef] [Green Version]
- Hochberg, L.R.; Serruya, M.D.; Friehs, G.M.; Mukand, J.A.; Saleh, M.; Caplan, A.H.; Branner, A.; Chen, D.; Penn, R.D.; Donoghue, J. Neuronal ensemble control of prosthetic devices by a human with tetraplegia. Nature 2006, 442, 164–171. [Google Scholar] [CrossRef]
- Lenhardt, A. A Brain-Computer Interface for Robotic Arm Control. 2011. Available online: http://pub.uni-bielefeld.de/publication/2529157 (accessed on 15 March 2022).
- Daly, J.J.; Wolpaw, J.R. Brain–computer interfaces in neurological rehabilitation. Lancet Neurol. 2008, 7, 1032–1043. [Google Scholar] [CrossRef]
- Masud, U.; Baig, M.I.; Akram, F.; Kim, T.-S. A P300 brain computer interface based intelligent home control system using a random forest classifier. In Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence, SSCI 2017, Honolulu, HI, USA, 27 November–1 December 2017. [Google Scholar]
- Edlinger, G.; Holzner, C.; Guger, C.; Groenegress, C.; Slater, M. Brain-computer interfaces for goal orientated control of a virtual smart home environment. In Proceedings of the 2009 4th International IEEE/EMBS Conference on Neural Engineering, Antalya, Turkey, 29 April–2 May 2009; pp. 463–465. [Google Scholar]
- Finke, A.; Lenhardt, A.; Ritter, H. The MindGame: A P300-based brain-computer interface game. Neural Netw. 2009, 22, 1329–1333. [Google Scholar] [CrossRef]
- Marshall, D.; Coyle, D.; Wilson, S.; Callaghan, M. Games, Gameplay, and BCI: The State of the Art. IEEE Trans. Comput. Intell. AI Games 2013, 5, 82–99. [Google Scholar] [CrossRef]
- Khan, M.J.; Hong, K.S. Hybrid EEG-FNIRS-based eight-command decoding for BCI: Application to quadcopter control. Front. Neurorobot. 2017, 11, 6. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lafleur, K.; Cassady, K.; Doud, A.; Shades, K.; Rogin, E.; He, B. Quadcopter control in three-dimensional space using a noninvasive motor imagery-based brain-computer interface. J. Neural Eng. 2013, 10, 4. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Naseer, N.; Hong, K.-S. fNIRS-based brain-computer interfaces: A review Frontiers in Human. Neuroscience 2015, 9, 1–15. [Google Scholar] [CrossRef] [Green Version]
- Hong, K.S.; Ghafoor, U.; Khan, M.J. Brain–machine interfaces using functional near-infrared spectroscopy: A review. Artif Life Robot. 2020, 25, 204–218. [Google Scholar] [CrossRef]
- Nicolas-Alonso, L.F.; Gomez-Gil, J. Brain Computer Interfaces, a Review. Sensors 2012, 12, 1211–1279. [Google Scholar] [CrossRef]
- Duan, X.; Xie, S.; Xie, X.; Meng, Y.; Xu, Z. Quadcopter Flight Control Using a Non-invasive Multi-Modal Brain Computer Interface. Front. Neurorobot. 2019, 13, 23. [Google Scholar] [CrossRef]
- Masud, U.; Saeed, T.; Malaikah, H.M.; Islam, F.U.; Abbas, G. Smart Assistive System for Visually Impaired People Obstruction Avoidance through Object Detection and Classification. IEEE Access 2022, 10, 13428–13441. [Google Scholar] [CrossRef]
- Dumitrescu, C.; Costea, I.-M.; Semenescu, A. Using Brain-Computer Interface to Control a Virtual Drone Using Non-Invasive Motor Imagery and Machine Learning. Appl. Sci. 2021, 11, 11876. [Google Scholar] [CrossRef]
- Chamola, V.; Vineet, A.; Nayyar, A.; Hossain, E. Brain-Computer Interface-Based Humanoid Control: A Review. Sensors 2020, 20, 3620. [Google Scholar] [CrossRef]
- Hong, K.-S.; Khan, M.J. Hybrid Brain–Computer Interface Techniques for Improved Classification Accuracy and Increased Number of Commands: A Review. Front. Neurorobot. 2017, 11, 35. [Google Scholar] [CrossRef] [Green Version]
- Akram, F.; Han, H.; Kim, T. A P300-Based Word Typing Brain Computer Interface System Using a Smart Dictionary and Random Forest Classifier. In Proceedings of the ICCGI 2013, The Eighth International Multi-Conference on Computing in the Global Information Technology, Nice, France, 21 July–26 July 2013; pp. 106–109. [Google Scholar]
- Nawaz, H.; Niazi, A.U.; Tahir, A.; Ahmad, N.; Masud, U.; Althobaiti, T.; Alotaibi, A.A.; Ramzan, N. Co-circularly Polarized Planar Antenna with Highly Decoupled Ports for S-Band Full Duplex Applications. IEEE Access 2022, 10, 16101–16110. [Google Scholar] [CrossRef]
- Amin, F.; Choi, G.S. Hotspots Analysis Using Cyber-Physical-Social System for a Smart City. IEEE Access 2020, 8, 122197–122209. [Google Scholar] [CrossRef]
- Amin, F.; Ahmad, A.; Sang Choi, G. Towards Trust and Friendliness Approaches in the Social Internet of Things. Appl. Sci. 2019, 9, 166. [Google Scholar] [CrossRef] [Green Version]
- Kohno, H.; Kubo, T. mKast is dispensable for normal development and sexual maturation of the male European honeybee. Sci. Rep. 2018, 8, 11877. [Google Scholar] [CrossRef]
- Daugela, I.; Suziedelyte Visockiene, J.; Kumpiene, J.; Suzdalev, I. Measurements of Flammable Gas Concentration in Landfill Areas with a Low-Cost Sensor. Energies 2021, 14, 3967. [Google Scholar] [CrossRef]
- The Best Drones for 2020. Available online: https://www.pcmag.com/picks/the-best-drones (accessed on 24 October 2020).
- Arturo Urquizo. Available online: http://commons.wikimedia.org/wiki/File:PID.svg (accessed on 27 October 2020).
- Araki, M. PID Control. Available online: http://www.eolss.net/ebooks/Sample%20Chapters/C18/E6-43-03-03.pdf (accessed on 21 September 2020).
- Alrayes, Z.O.; Gadalla, M. Development of a Flexible Framework Multi-Design Optimization Scheme for a Hand Launched Fuel Cell-Powered UAV. Energies 2021, 14, 2951. [Google Scholar] [CrossRef]
- Burke, P.J. Demonstration and application of diffusive and ballistic wave propagation for drone-to-ground and drone-to-drone wireless communications. Sci. Rep. 2020, 10, 14782. [Google Scholar] [CrossRef]
- Bindemann, M.; Fysh, M.C.; Sage, S.S.K.; Douglas, K.; Tummon, H.M. Person identification from aerial footage by a remote-controlled drone. Sci. Rep. 2017, 7, 13629. [Google Scholar] [CrossRef] [Green Version]
- Omand, D. The Security Impact of Drones: Challenges and Opportunities. Birmingham Policy Commission. Available online: http://www.birmingham.ac.uk/Documents/research/policycommission/remote-warfare/final-report-october-2014.pdf (accessed on 5 January 2022).
- Camber, R. Take Off for Police Drones Air Force: Remote-Controlled ‘Flying Squad’ to Chase Criminals and Hunt for Missing People. Daily Mail, 2017. Available online: http://www.dailymail.co.uk/news/article-4329714/Remote-controlled-flying-squad-chase-criminals.html(accessed on 22 October 2020).
- Masud, U. Investigations on Highly Sensitive Optical Semiconductor Laser Based Sensorics for Medical and Environmental Applications: The Nanonose; Kassel University Press: Kassel, Germany, 2015; ISBN 3862195554. [Google Scholar]
- Floreano, D.; Wood, R. Science, technology and the future of small autonomous drones. Nature 2015, 521, 460–466. [Google Scholar] [CrossRef] [Green Version]
- Škrinjar, J.P.; Škorput, P.; Furdić, M. Application of Unmanned Aerial Vehicles in Logistic Processes. In New Technologies, Development and Application; NT 2018; Lecture Notes in Networks and Systems; Karabegović, I., Ed.; Springer: Cham, Switzerland, 2019; Volume 42. [Google Scholar] [CrossRef]
- Mehrer, M.; Moreno, S.; Hartman, D.; Landis, K.; Kim, J. Quadcopter Dynamic Modeling and Simulation. MATLAB and Simulink. Student Design Challenge. 2014. Available online: https://de.mathworks.com/academia/student-challenge/spring-2014.html (accessed on 6 January 2022).
- Gyula Mester Aleksander Rodic. The modeling and simulation of an autonomous quad-rotor microcopter in a virtual outdoor scenario. Acta Polytech. Hung. 2011, 8, 107–124. [Google Scholar]
- Harik, E.H.C.; Guérin, F.; Guinand, F.; Brethé, J.; Pelvillain, H. Towards an autonomous warehouse inventory scheme. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence, Athens, Greece, 6–9 December 2016. [Google Scholar]
- Masud, U.; Baig, M.I. Investigation of Cavity Length and Mode Spacing Effects in Dual-Mode Sensor. IEEE Sens. J. 2018, 18, 2737–2743. [Google Scholar] [CrossRef]
- Pakistani Tech Company Develops Drones to Plant Thousands of Trees in a Day. Available online: https://propakistani.pk/2020/10/23/pakistani-tech-company-develops-drones-to-plant-thousands-of-trees-in-a-day/?fbclid=IwAR0Hvnkkz8CtDM168It33Abh3VMJA6onCJwHYH4DmahFVhUMxiFXK4lgGos (accessed on 24 October 2020).
- Masud, U.; Ali, M.; Ikram, M. Calibration and stability of highly sensitive fibre based laser through relative intensity noise. Phys. Scr. 2020, 95, 055505. [Google Scholar] [CrossRef]
- Masud, U.; Jeribi, F.; Zeeshan, A.; Tahir, A.; Ali, M. Highly Sensitive Microsensor Based on Absorption Spectroscopy: Design Considerations for Optical Receiver. IEEE Access 2020, 8, 100212–100225. [Google Scholar] [CrossRef]
- Usman, M.; Mudassar, A.; Farhan, Q.; Ahmed, Z.; Momna, I. Dual mode spectroscopic biomedical sensor: Technical considerations for the wireless testbed. Phys. Scr. 2020, 95, 105206. [Google Scholar]
- Han, S.S.; Ghafoor, U.; Saeed, T.; Elahi, H.; Masud, U.; Kumar, L.; Selvaraj, J.; Ahmad, M.S. Silicon Particles/Black Paint Coating for Performance Enhancement of Solar Absorbers. Energies 2021, 14, 7140. [Google Scholar] [CrossRef]
- Butt, O.M.; Saeed, T.; Elahi, H.; Masud, U.; Ghafoor, U.; Che, H.S.; Rahim, N.A.; Ahmad, M.S. A Predictive Approach to Optimize a HHO Generator Coupled with Solar PV as a Standalone System. Sustainability 2021, 13, 12110. [Google Scholar] [CrossRef]
- Kim, Y.K.; Wang, H.; Mahmud, M.S. 9—Wearable body sensor network for health care applications. In Woodhead Publishing Series in Textiles, Smart Textiles and their Applications; Koncar, V., Ed.; Woodhead Publishing: Cambridge, UK, 2016; pp. 161–184. ISBN 9780081005743. [Google Scholar] [CrossRef]
- Bradke, B.S.; Miller, T.A.; Everman, B. Photoplethysmography behind the Ear Outperforms Electrocardiogram for Cardiovascular Monitoring in Dynamic Environments. Sensors 2021, 21, 4543. [Google Scholar] [CrossRef]
- Batista, A.D.; Silva, W.R.; Mizaikoff, B. Molecularly imprinted materials for biomedical sensing. Med. Devices Sens. 2021, 4, e10166. [Google Scholar] [CrossRef]
- Zhou, G.; Wang, Y.; Cui, L. Biomedical Sensor, Device and Measurement Systems, Advances in Bioengineering, Pier Andrea Serra; Intech Open: Rijeka, Croatia, 2015. [Google Scholar] [CrossRef] [Green Version]
- Masud, U.; Jeribi, F.; Alhameed, M.; Akram, F.; Tahir, A.; Naudhani, M.Y. Two-Mode Biomedical Sensor Build-up: Characterization of Optical Amplifier. CMC-Comput. Mater. Contin. 2022, 70, 5487–5489. [Google Scholar] [CrossRef]
- Harsányi, G. Sensors in biomedical applications. Sens. Rev. 2001, 21, 4. [Google Scholar] [CrossRef]
- Wang, P.; Liu, Q. Biomedical Sensors and Measurement; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar] [CrossRef]
- Maza, I.; Caballero, F.; Capitán, J.; Martínez-de-Dios, J.R.; Ollero, A. Experimental results in multi-UAV coordination for disaster management and civil security applications. J. Intell. Rob. Syst. 2011, 61, 563–585. [Google Scholar] [CrossRef]
- Kim, M.; Matson, E.T. A cost-optimization model in multi-agent system routing for drone delivery. In Highlights of Practical Applications of Cyber-Physical Multi-Agent Systems, PAAMS 2017; Communications in Computer and Information Science; Springer: Cham, Switzerland, 2017; p. 722. [Google Scholar]
- Masud, U.; Jeribi, F.; Alhameed, M.; Tahir, A.; Javaid, Q.; Akram, F. Traffic Congestion Avoidance System Using Foreground Estimation and Cascade Classifier. IEEE Access 2020, 8, 178859–178869. [Google Scholar] [CrossRef]
- The Top 100 Drone Companies to Watch in 2020. Available online: https://uavcoach.com/drone-companies/ (accessed on 21 July 2020).
- Unmanned Systems Technology. Available online: https://www.unmannedsystemstechnology.com/supplier-directory/ (accessed on 17 September 2020).
- On Line Store of Saravana Electronics. Available online: http://www.alselectro.com/frame-f450.html (accessed on 13 January 2020).
- Zeeshan, A.; Masud, U.; Saeed, T.; Hobiny, A. On the effects of chemical reaction on controlled heat and mass transfer in magnetized non-Newtonian biofluid through a long rectangular tunnel. J. Therm. Anal. Calorim. 2021, 143, 2637–2646. [Google Scholar] [CrossRef]
- Hassan, M.; Faisal, A.; Bhatti, M.M. Interaction of aluminum oxide nanoparticles with flow of polyvinyl alcohol solutions base nanofluids over a wedge. Appl. Nanosci. 2018, 8, 53–60. [Google Scholar] [CrossRef] [Green Version]
- Ellahi, R.; Hassan, M.; Zeeshan, A. Study of natural convection MHD nanofluid by means of single and multi-walled carbon nanotubes suspended in a salt-water solution. IEEE Trans. Nanotechnol. 2015, 14, 726–734. [Google Scholar] [CrossRef]
- Sheikholeslami, M.; Ellahi, R.; Ashorynejad, H.; Domairry, G.; Hayat, T. Effects of heat transfer in flow of nanofluids over a permeable stretching wall in a porous medium. J. Comput. Theor. Nanosci. 2014, 11, 486–496. [Google Scholar] [CrossRef]
- Barzkar, A.; Ghassemi, M. Electric Power Systems in More and All Electric Aircraft: A Review. IEEE Access 2020, 8, 169314–169332. [Google Scholar] [CrossRef]
- Naus, K.; Szymak, P.; Piskur, P.; Niedziela, M.; Nowak, A. Methodology for the Correction of the Spatial Orientation Angles of the Unmanned Aerial Vehicle Using Real Time GNSS, a Shoreline Image and an Electronic Navigational Chart. Energies 2021, 14, 2810. [Google Scholar] [CrossRef]
- What is DSHOT ESC Protocol. Available online: https://oscarliang.com/dshot/ (accessed on 18 September 2020).
- Marco, M.; Kris, S. Design and Implementation of an Electronic Speed Controller for Brushless DC Motors. Ph.D. Thesis, Malta College of Arts, Science & Technology, Paola, Malta, 2017. [Google Scholar] [CrossRef]
- Dixit, K.R.; Krishna, P.P.; Antony, R. Design and development of H frame quadcopter for control system with obstacle detection using ultrasound sensors. In Proceedings of the 2017 International Conference on Circuits, Controls, and Communications (CCUBE), Bangalore, India, 15–16 December 2017; pp. 100–104. [Google Scholar] [CrossRef]
- Vedder, B.; Eriksson, H.; Skarin, D.; Vinter, J.; Jonsson, M. Towards Collision Avoidance for Commodity Hardware Quadcopters with Ultrasound Localization. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS) Denver Marriott Tech Center Denver, Denver, CO, USA, 9–12 June 2015. [Google Scholar]
- Koumaras, H.; Makropoulos, G.; Batistatos, M.; Kolometsos, S.; Gogos, A.; Xilouris, G.; Sarlas, A.; Kourtis, M.-A. 5G-Enabled UAVs with Command and Control Software Component at the Edge for Supporting Energy Efficient Opportunistic Networks. Energies 2021, 14, 1480. [Google Scholar] [CrossRef]
- Electronic Speed Controller Reference Design for Drones. Available online: https://eepower.com/new-industry-products/electronic-speed-controller-reference-design-for-drones/# (accessed on 12 September 2020).
- Nugraha, A.T.; Agustinah, T. Quadcopter path following control design using output feedback with command generator tracker LOS based at square path. J. Phys. Conf. Ser. 2018, 947, 012074. [Google Scholar] [CrossRef]
- Scher, C.L.; Griffoul, E.; Cannon, C.H. Drone-based photogrammetry for the construction of high-resolution models of individual trees. Trees 2019, 33, 1385–1397. [Google Scholar] [CrossRef] [Green Version]
- Quadcopter Dynamics and Simulation. Available online: https://andrew.gibiansky.com/blog/physics/quadcopter-dynamics/ (accessed on 12 September 2018).
- Pérez Gordillo, A.M.; Villegas Santos, J.S.; Lo Mejia, O.D.; Suárez Collazos, L.J.; Escobar, J.A. Numerical and Experimental Estimation of the Efficiency of a Quadcopter Rotor Operating at Hover. Energies 2019, 12, 261. [Google Scholar] [CrossRef] [Green Version]
- Adafruit Ultimate GPS. Available online: https://learn.adafruit.com/adafruit-ultimate-gps (accessed on 12 September 2021).
- Cormen, T.H.; Leiserson, C.E.; Rivest, R.L.; Stein, C. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2009; ISBN 978-0-262-53305-8. [Google Scholar]
- Levitin, A.V. Introduction to the Design and Analysis of Algorithms; Addison Wesley: Reading, MA, USA, 2002. [Google Scholar]
- Xiang, C.; Wang, X.; Ma, Y.; Xu, B. Practical Modeling and Comprehensive System Identification of a BLDC Motor. Math. Probl. Eng. 2015, 2015, 879581. [Google Scholar] [CrossRef] [Green Version]
- Mondal, S.; Mitra, A.; Chattopadhyay, M. Mathematical modeling and simulation of Brushless DC motor with ideal Back EMF for a precision speed control. In Proceedings of the 2015 IEEE International Conference on Electrical, Computer and Communication Technologies (ICECCT), Coimbatore, India, 5–7 March 2015; pp. 1–5. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
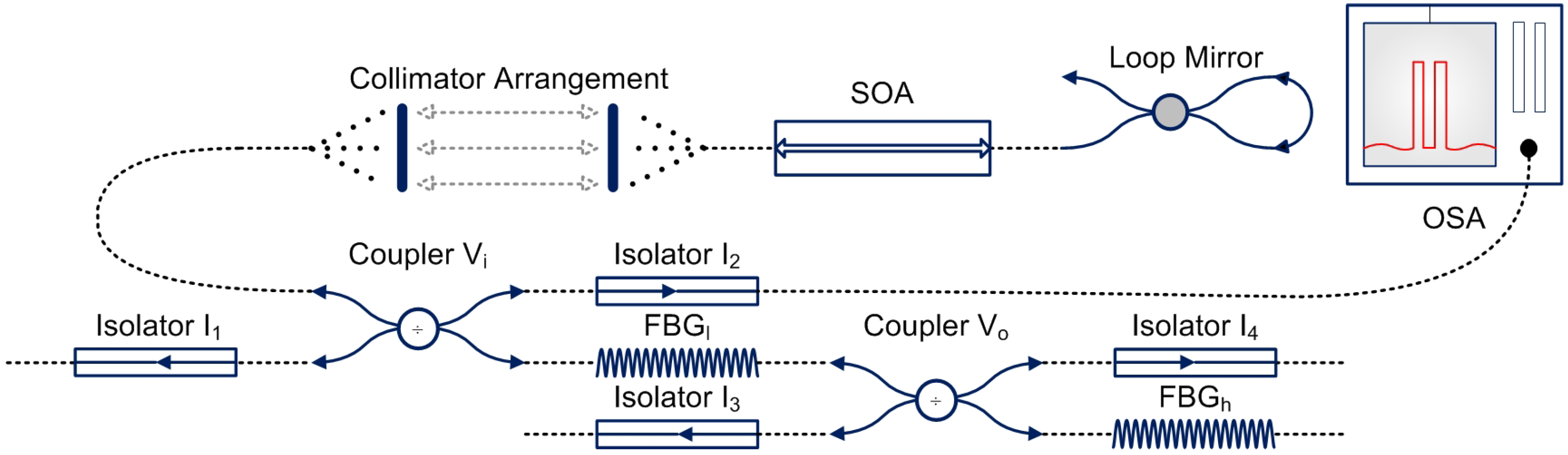
| VCi/VC1 | Variable Coupler corresponding to the inner cavity |
| VCo/VC2 | Variable Coupler corresponding to the outer cavity |
| SOA | Semiconductor Optical Amplifier |
| OSA | Optical Spectrum Analyzer |
| Mi/M1 | Mode corresponding to the inner cavity |
| Mo/M2 | Mode corresponding to the outer cavity |
| UAV | Unmanned Air Vehicle |
| ESC | Electronic Speed Controller |
| BLDC | Brushless Direct Current |
| BEC | Battery Elimination Circuit |
| Li-Po | Lithium Polymer |
| Roll | |
| Pitch | |
| Yaw | |
| Back Electromotive Force | |
| Electromagnetic Torque | |
| Torque due to rotational acceleration of motor | |
| Torque generated due to velocity of the motor | |
| Torque due to mechanical load across motor | |
| Torque constant | |
| J | Inertia of constant |
| Coefficient for Proportional term | |
| Coefficient for Integral term | |
| Coefficient for Derivative term |
| No. | Parameter | Description |
|---|---|---|
| 1 | Satellites | 22 tracking, 66 searching |
| 2 | Patch Antenna Size | 15 mm × 15 mm × 4 mm |
| 3 | Update rate | 1 to 10 Hz |
| 4 | Position Accuracy | 1.8 m |
| 5 | Velocity Accuracy | 0.1 m/s |
| 6 | Warm/cold start | 34 s |
| 7 | Acquisition sensitivity | −145 dBm |
| 8 | Tracking sensitivity | −165 dBm |
| 9 | Maximum Velocity | 515 m/s |
| 10 | Input Voltage range | 3.0–5.5 V DC |
| 11 | Current drawn during navigation | 25 mA tracking, 20 mA |
| 12 | Output | NMEA 0183, 9600 baud default |
| 13 | Feature | Multi-path detection and compensation |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Masud, U.; Saeed, T.; Akram, F.; Malaikah, H.; Akbar, A. Unmanned Aerial Vehicle for Laser Based Biomedical Sensor Development and Examination of Device Trajectory. Sensors 2022, 22, 3413. https://doi.org/10.3390/s22093413
Masud U, Saeed T, Akram F, Malaikah H, Akbar A. Unmanned Aerial Vehicle for Laser Based Biomedical Sensor Development and Examination of Device Trajectory. Sensors. 2022; 22(9):3413. https://doi.org/10.3390/s22093413
Chicago/Turabian StyleMasud, Usman, Tareq Saeed, Faraz Akram, Hunida Malaikah, and Altaf Akbar. 2022. "Unmanned Aerial Vehicle for Laser Based Biomedical Sensor Development and Examination of Device Trajectory" Sensors 22, no. 9: 3413. https://doi.org/10.3390/s22093413
APA StyleMasud, U., Saeed, T., Akram, F., Malaikah, H., & Akbar, A. (2022). Unmanned Aerial Vehicle for Laser Based Biomedical Sensor Development and Examination of Device Trajectory. Sensors, 22(9), 3413. https://doi.org/10.3390/s22093413