1. Introduction
The altitude measurement during a flight is the most crucial information for achieving flight safety [
1]. Altitude is usually measured by three different measurement principles, by measuring the change in static atmospheric pressure (barometric altimeter), by propagation and reflection of radio waves emitted towards the ground (radio altimeter) or the newest principle, by satellite navigation systems (GPS altitude) [
2,
3,
4,
5]. The radio altimeter is a device which has been used in aviation for instantaneous altitude measurement for almost eighty years [
6,
7]. These devices have developed and obtained the usual accuracy of ±30 cm. Information of the so-called real (actual) altitude above the terrain, or runway, is crucial for a lot of aircraft systems, like Auto Flight systems (Automatic Flight Guidance and Control Systems, Stick pusher/shaker, Flight Director, Thrust reversers, Autothrottle, Flight Controls, Flight Envelope Protection Systems), anticollision systems (Ground Proximity Warning Systems—GPWS, Traffic Collision Avoidance Systems—TCAS, Windshear detection, Tail strike prevention), and assistance aircraft systems (height above ground shown on Primary Flight Display, Take-off guidance systems, Engine and wing anti-icing systems) [
5,
6,
7].
The FMCW (Frequency Modulated Constant Wave) radio altimeters are the most used radio altimeters in aviation [
7,
8]. They use the harmonic, high-frequency, frequency-modulated signal to measure the aircraft’s height above the earth’s surface. When compared to the other sources of actual flight altitude information, the radio altimeter is the most accurate one, and its information is used in many crucial aircraft systems [
7,
8]. The measured height is usually in the range of 0 m to 750 m—depending on the type of aircraft on which the radio altimeter is installed and used. Radio altimeters are mainly used at low flight altitudes and in the final stages of flight, usually during the most dangerous landing guidance and the landing process or in the hovering phase or approach of the helicopter [
9,
10].
Altitude measurements by radio altimeters are affected by several measurement inaccuracies, which were discussed in [
11,
12]. Some of these inaccuracies cannot be influenced and are fixed by the circuit design of the radio altimeter. However, others can be quantified and their overall effect on the accuracy of height measurements calculated [
12,
13]. One of the measurement errors, which cannot be altered, is the radio altimeter dynamic error. This error is constant (t ≈ 0.5 s) during all operations and is caused by the measurement method and its internal circuitry.
The present research focuses on the error of the radio altimeter with frequency modulation, which is created due to the influence of the Doppler effect during the aircraft’s descent or ascend. This error arises because when the aircraft is descending (or ascending), the value of the difference frequency, which carries information about the real flight height, changes by the value of the Doppler frequency [
14,
15]. This will result in a frequency shift of the evaluated signals, and the error of measuring the real (instantaneous) height measured with some radio altimeters may exceed the tolerated value [
16,
17,
18,
19,
20]. This Doppler frequency value represents the increase in the frequency of the received signal over the transmitted signal if the aircraft is descending and the decrease in frequency if the aircraft is climbing. This phenomenon can be used to determine the prognosis of the aircraft/helicopter/unmanned aerial vehicle (UAV) radio altitude loss—the potential impact to the terrain. In the material and methods chapter, we describe the phenomenon of Doppler shift creation and how it affects the difference frequency creation, as it is the main principle of how the FMCW radio altimeter measures height. In the main section, the hypothesis of using the Doppler shift for predicting altitude loss is discussed together with an analysis of flight and laboratory experiments. The results are discussed in the fourth chapter.
2. Materials and Methods
The radio altimeter principle is that its transmitter (HFG-5 in
Figure 1) produces a high-frequency, frequency-modulated signal u
v(t), which is radiated towards the earth’s surface via the transmitting antenna.
One of the three most common functions is used as the modulation frequency (the waveforms of which are shown in
Figure 2) [
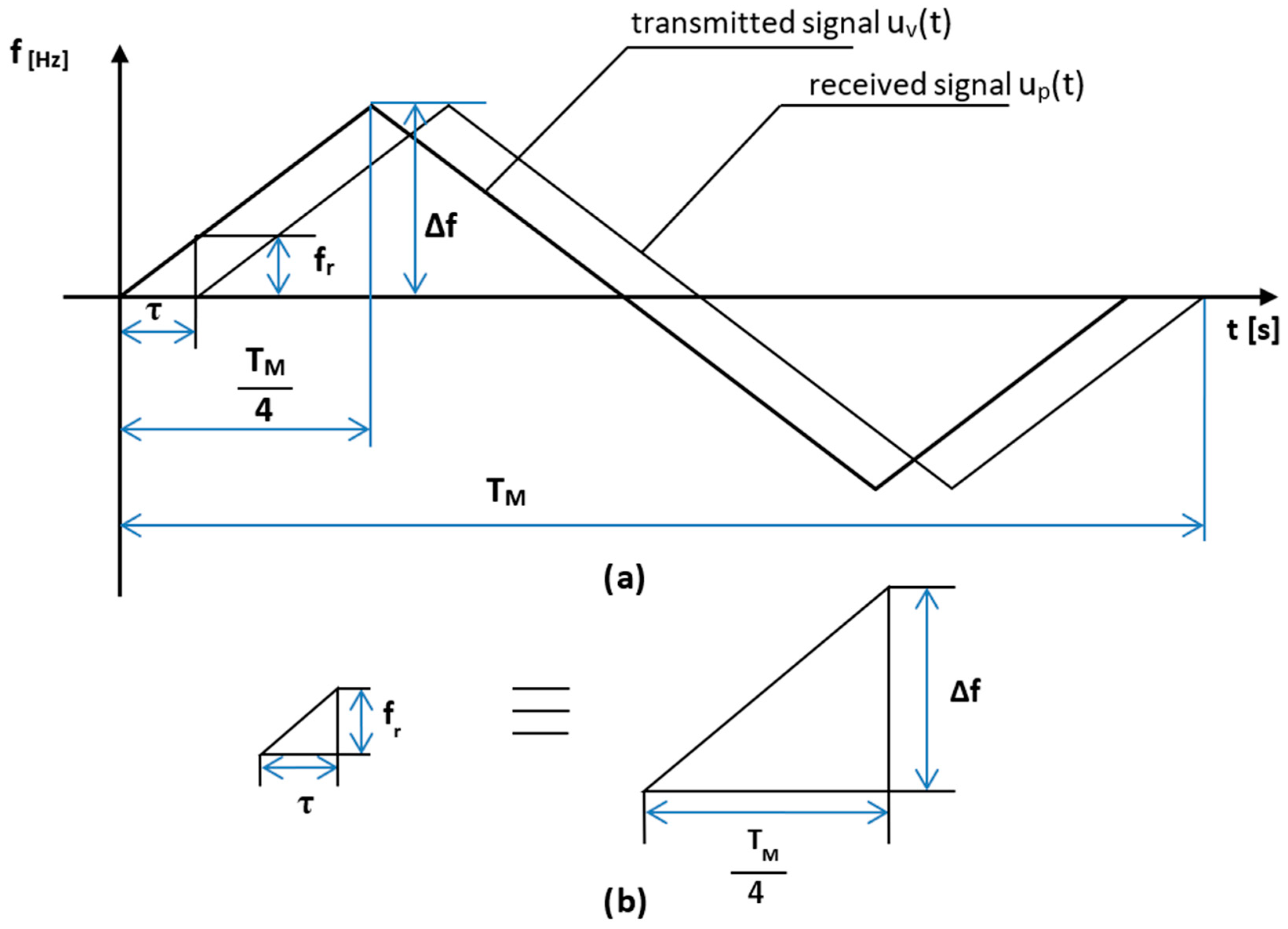
7]. In our case, the radio altimeter uses a symmetric sawtooth modulating signal. As a result, the course of the signal reflected from the ground is the same as the course of the transmitted signal (
Figure 3a), only it is delayed by the time required for the signal to propagate to the ground and back, which is expressed by Equation (1):
where:
τ—is the time delay of the received signal,
H—is the flight altitude of the aircraft,
c—is the propagation speed of electromagnetic waves.
We use a radio altimeter with a symmetric sawtooth modulation signal course for this research.
The reflected signal from the earth’s surface up(t) and received signal by the receiving antenna is fed into a balanced mixer, where the direct signal uv(t) from the transmitter is fed simultaneously. As a result of the reflected signal being time-delayed, the frequency of the direct signal at any instant is different from the frequency of the reflected signal.
At the output of the balanced mixer, after the separation of unwanted components, a differential signal
ur(
t) arises, whose frequency
fr is expressed by Equation (2):
where:
fr—is the difference frequency,
fv(t)—is the transmitted frequency,
fp(t)—is the frequency of the received signal.
The absolute value is applied in Equation (2) for a physical reason—the frequency is always positive.
It can be seen from the time courses (
Figure 3a) that the size of the difference frequency, which depends on the time delay of the reflected signal, is constant for the most significant part of the modulation period, with the amplitude not changing and can be expressed by the following Equation (3):
where:
fr—is the difference frequency,
Δf—is the frequency lift,
fM—is the modulation frequency,
H—is the flight altitude of the aircraft,
c—is the propagation speed of electromagnetic waves.
The time period τ, in which the difference frequency fr is not constant, is called the phase rotation band—at the middle point of this band, the function fr(t) is equal to zero.
Equation (3) is the fundamental equation of a radio altimeter with frequency modulation and constant modulation period. This equation is valid only in cases when it is possible to neglect the influence of the band rotation of the phase of the difference signal
ur(
t) and if we can consider that relationship (4) will be valid for the entire duration of the modulation period.
This condition is met only at low altitudes (approximately 2000 m). Due to this, these radio altimeters are named low-altitude radio altimeters [
21,
22].
2.1. Generation of (Height) Impulses in a Radio Altimeter with Frequency Modulation
The signal ur(t) from the balanced mixer is amplified by a difference signal amplifier and fed to the evaluation circuit, where the magnitude of the difference frequency is evaluated, corresponding to the aircraft’s actual flight height.
The basic equation of a radio altimeter with frequency modulation and a constant modulation period (3) is derived from the course of the modulation period while using the similarity of triangles (
Figure 3b) representing the course of change in the value of the frequency of the transmitted signal over time.
If it is true that ΔABC ≡ ΔDEF, then the Equation (5) is:
where:
fr—is the difference frequency,
τ—is the time delay of the received signal,
Δf—is the frequency lift,
TM—is the modulation period.
When Equation (1) applies, and at the same time, then Equation (6) expresses the value of the modulation period (TM):
where:
TM—is the modulation period,
fM—is the modulation frequency.
At the same time, the equation is (7):
fr—is the difference frequency,
c—is the propagation speed of electromagnetic waves,
Δf—is the frequency lift,
H—is the flight altitude of the aircraft,
fM—is the modulation frequency.
The final form of the fundamental equation of the radio altimeter can be derived from these relationships (3)–(7).
The current radio altimeters use frequency meters as evaluation circuits, which are implemented as spectrum analyzers or as analogue or digital meters with direct or indirect differential frequency measurement. In terms of simplicity of operation and reliability, evaluation circuits with direct measurement of the difference frequency are most often used. The principle of their function consists of counting impulses, which are shaped from the difference signal u
r(t) throughout the duration of the modulation period T
M (
Figure 4).
As can be seen in
Figure 4, the low-frequency difference signal u
r(t) is fed to a two-way limiter after filtering and necessary amplification. Double-sided constraints provide greater fault tolerance. The limit thresholds u
1 and u
2 are usually chosen, as shown in
Figure 4a. The two-way limited signal in the form of voltage impulses u
rob(t) (
Figure 4b) proceeds to the derivative circuit. The voltage peaks (
Figure 4c) that we get at its output go to the DC rectifier to filter negative voltage peaks. As a result, the positive derivative impulses u
di(t) (
Figure 4d) have the same frequency as the difference signal frequency.
The obtained voltage impulses feed either a classical integrator, as is the case with older types of radio altimeters with analogue output, or a decade counter, which is used in more modern radio altimeters. The output is a DC voltage u
int(t) (
Figure 4e), which is proportional to the number of voltage impulses.
In addition to the mentioned circuit, which forms the height measurement channel, the radio altimeter also contains other auxiliary circuits, such as the circuit for signaling the selected value of the dangerous height, the radio altimeter status self-checking circuit, the radio altimeter testing circuit, and more. However, these circuits do not affect the height measurement itself and, for this reason, will not be discussed further.
2.2. Doppler Effect in Radio Altimeters with Frequency Modulation
In this subsection, the problem of radio altimeter error with frequency modulation, created by the influence of the Doppler effect during the aircraft’s descent in landing mode, is briefly discussed. When the aircraft/helicopter/UAV is descending, the value of the difference frequency, which carries information about the height, changes by the value of the Doppler frequency. This will result in a frequency shift of the evaluated signals. In the case of an increase in the frequency of the received signal compared to the transmitted signal, the aircraft is descending. In the opposite case, i.e., when the frequency of the received signal decreases compared to the transmitted signal, the aircraft is climbing.
To explain the frequency shift due to the Doppler effect of the radio altimeter transmitter signal during its reception, we assume that the aircraft descends at a vertical speed vv. The electromagnetic wave of the radio altimeter transmitter signal is emitted with a frequency
fv(
t) and falls on the earth’s surface with a frequency shift
(t), which is expressed by Equation (7):
where:
fv(t)—is the transmitted frequency,
(t)—is the transmitted frequency, impacting on the earth’s surface, with a frequency shift,
C—is the propagation speed of electromagnetic waves,
vv—is the vertical speed of the aircraft.
Assume that the signal source is moving towards the ground and the observer is standing stationary on the ground. The signal is emitted perpendicular to the earth’s surface, and the vertical component of the aircraft’s speed during descent corresponds to the radial component of the propagating signal—this can be assumed due to the very low speed of the aircraft compared to the speed of propagation of electromagnetic waves. This fact is influenced by the layout of the antennas on the fuselage.
After the signal reflects off the earth’s surface, the earth becomes the secondary source of the signal, and the receiving antenna represents the observer. As the aircraft descends, this corresponds to the case where the observer approaches the source, and the received frequency is given by the Equation (9):
where:
(t)—is the received frequency,
(t)—is the transmitted frequency, falling on the earth’s surface, with a frequency shift,
c—is the propagation speed of electromagnetic waves,
vv—is the vertical speed of the aircraft.
Modifying Equation (9) by adding from Equation (8), results in Equation (10):
where:
(t)—is the received frequency,
fv(t)—is the transmitted frequency,
c—is the propagation speed of electromagnetic waves,
vv—is the vertical speed of the aircraft.
This expression (10) represents the Doppler effect. Therefore, the difference between the frequency of the received and transmitted signals is the Doppler frequency
fD, which can be expressed as Equation (11):
where:
fD—is the Doppler frequency,
fv(t)—is the transmitted frequency,
(t)—is the received frequency,
c—is the propagation speed of electromagnetic waves,
vv—is the vertical speed of the aircraft.
Assuming that
vv <<
c, Equation (11) can be written simply as Equation (12):
where:
fD—is the Doppler frequency,
fv(t)—is the transmitted frequency,
c—is the propagation speed of electromagnetic waves,
vv—is the vertical speed of the aircraft.
This Doppler frequency value represents the increase in the transmitted signal frequency if the aircraft is descending and the decrease in signal if the aircraft is climbing (
Figure 5). For simplicity, we set (13):
where:
fv(t)—is the transmitted frequency,
f0—is the middle frequency of the carrier signal.
In such a case, a difference in frequency arises with the inclusion of the Doppler frequency, which is expressed by the Equation (14):
where:
frD—is the difference frequency, including the Doppler frequency,
fr—is the difference frequency,
fD—is the Doppler frequency,
fM—is the modulation frequency,
c—is the propagation speed of electromagnetic waves,
Δf—is the frequency lift,
H—is the flight altitude of the aircraft,
vv—is the vertical speed of the aircraft,
f0—is the middle frequency of the carrier signal.
Figure 5 shows that if the frequency modulation has the shape of a symmetrical saw, then in one half-period of the modulation frequency, the difference frequency increases due to the Doppler frequency and decreases in the other half-period. The lower panel in
Figure 5 shows that during modulation with a symmetrical saw, the negative influence of the Doppler frequency does not manifest itself because the mean value of the difference frequency does not change during one modulation period. It will not be reflected in altimeters that use a symmetrical saw in modulation—for example, the altimeters RV-5, RV-15, KRA-405, or RV-UM. Altitude measurement by radio altimeters is generally affected by several measurement inaccuracies (methodological error, instability error of frequency modulation parameters, dynamic error, instrument error, Doppler effect error, radio altimeter parameter fluctuation error, displacement error, error due to external conditions and parasitic modulation error). The total measurement error of the radio altimeter we were examining (RV-5) is ± 0.75 m (which represents 100% inaccuracy). The methodological error has the largest share in this inaccuracy (70%); frequency modulation parameter instability error is next (20%); an aircraft/helicopter flight dynamics error of 6% and remaining measurement errors such as parasitic modulation or Doppler shift error represent the remaining 4%. Data for such a statistical evaluation were obtained through many years of research by the authors in the field of radio altimeters [
11,
12,
13,
14].
3. Potential Use of the Doppler Effect for Prediction of the Altitude Loss
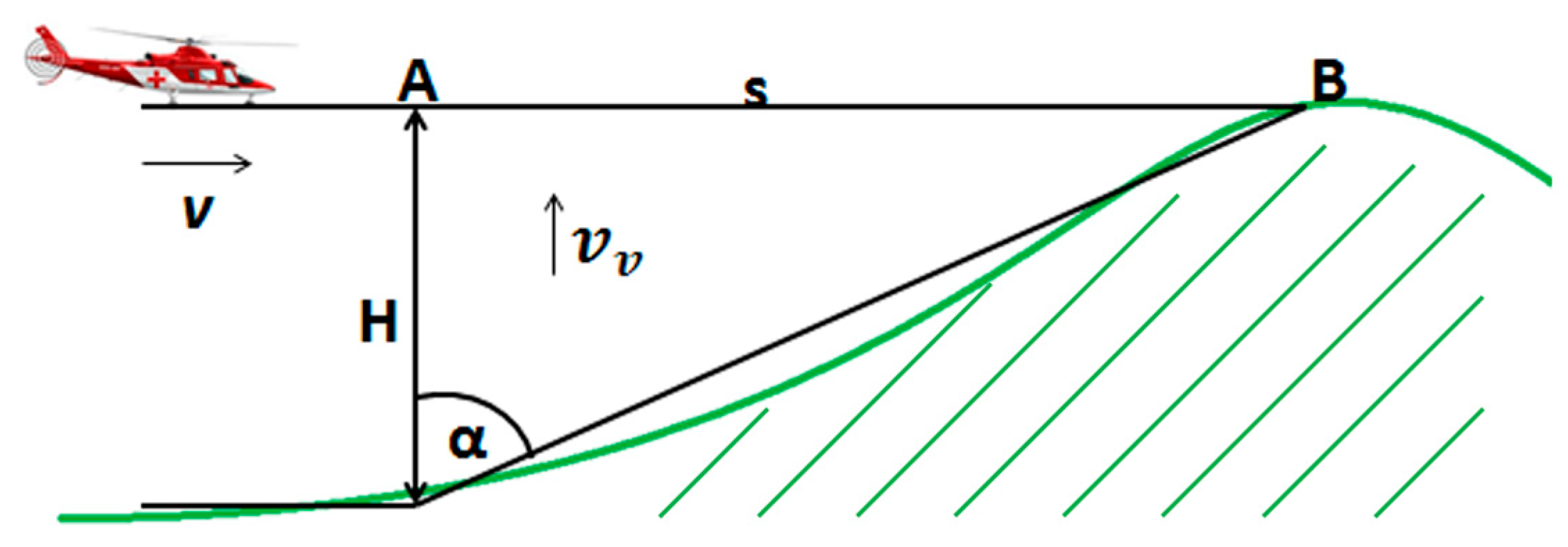
In this hypothesis, let us assume that the aircraft/helicopter/UAV, equipped with the FMCW radio altimeter, with a symmetric sawtooth modulation signal, constantly flies on one flight level at a height H above the terrain. Furthermore, let us also assume that the terrain begins to rise towards the flying aircraft from a certain point A (
Figure 6).
The loss of the aircraft altitude occurs at point
B, at time
t when the aircraft passes the flight path
s, so (Equation (15)):
where:
t—is the time to the potential collision with the terrain,
s—is the flight path of the aircraft,
v—is the flight-speed of the aircraft,
α—is the angle of attack of the terrain.
When the terrain is coming up to the aircraft, the Doppler frequency (
fD) is shaped, which is proportional to the vertical component of the velocity
vv. According to
Figure 5, the vertical component of the velocity is determined by Equation (16):
where:
vv—is the vertical speed of the aircraft,
v—is the flight-speed of the aircraft,
α—is the angle of attack of the terrain.
Substituting Equation (16) into Equation (15), results in Equation (17) for determining the time, which represents the ratio between the flight height of the aircraft and the vertical component of the velocity:
where:
t—is the time to the potential collision with the terrain,
H—is the flight altitude of the aircraft,
vv—is the vertical speed of the aircraft.
The flight height of the aircraft H is evaluated by a conventional radio altimeter and given by the difference frequency fr value. A radio altimeter converts the measured value of the difference frequency fr proportional to height into a voltage UH proportional to height.
The vertical component of the velocity
vv corresponds to the value of the Doppler frequency
fD. To determine the dangerous time, it is necessary to convert the value of the Doppler frequency
fD, proportional to the vertical component of the velocity, into the voltage
UD, which is proportional to the vertical component of the velocity. The state when these two voltages reach a certain ratio determines the dangerous time that remains until the aircraft collides with the terrain. It is expressed by Equation (18):
where:
t—is the time to the potential collision with the terrain,
H—is the flight altitude of the aircraft,
vv—is the vertical speed of the aircraft,
fr—is the difference frequency,
fD—is the Doppler frequency,
UH—is the voltage proportional to the flight altitude of the aircraft,
UD—is the voltage proportional to the vertical component of the aircraft’s flight-speed.
This hypothesis was patented by the authors and creates the theoretical background for using the former Doppler shift error, which affects the measurement of radio altitude by the FMCW radio altimeter, as a source of information for potential altitude loss leading to dangerous flight scenarios [
23]. To get an answer to this hypothesis, the authors’ team conducted a series of experiments, which are discussed in the following sections and subsections.
3.1. Flight Experiment
The real flight experiment with a similar scenario, as shown in
Figure 6, was conducted to assess if the initial hypothesis was correct. The authors wanted to confirm that the emergence of the Doppler frequency increment to the difference frequency will occur and could be successfully evaluated [
14]. For understandable reasons, the helicopter flew by at a set height just above the top of the hill. A recording device was connected to the radio altimeter, recording the difference frequency course during the experiment. Spectral analysis of the recorded difference signal proved that the frequency proportional to the flight height also contains the Doppler frequency—
Figure 7 (
;
). Based on the flight parameters, the Doppler frequency can be calculated and compared with the data obtained from the spectral analysis of the difference signal. To determine the value of the Doppler frequency
fD, it is, therefore, necessary to determine the value of the vertical component of the velocity
vv.
The helicopter flight-speed during the experiment was 150 kmh
−1. The value corresponds to the horizontal component of the velocity v = 41.67 ms
−1. Then, using the function tan of the known value of the angle β and the horizontal component of the velocity v, the vertical component of the velocity
vv can be calculated (Equations (19) and (20)).
where:
vv—is the vertical speed of the aircraft,
v—is the flight-speed of the aircraft,
β—is the steepness of the hill.
The calculated value of the vertical component of the velocity is
vv = 30.84 m·s
–1. By introducing the value into Equation (20), it is possible to calculate the Doppler frequency
fD. At the same time, the value of the carrier frequency of the RV-5 radio altimeter on which the experiment was performed is (
) Hz.
where:
fD—is the Doppler frequency,
f0—is the middle frequency of the carrier signal,
vv—is the vertical speed of the aircraft,
c—is the propagation speed of electromagnetic waves.
The calculated value of the Doppler frequency (fD) of 905 Hz is practically identical to the measured value of the Doppler frequency (fD) of 930 Hz and the difference is due to possible inaccuracies in calculations and errors during recording and the measurement itself.
This flight experiment showed us that the Doppler effect causing the Doppler frequency shift is measurable and can be evaluated [
14]. This success led us to try to reproduce the flight experiment in laboratory conditions and to design a simpler way to detect and measure the Doppler effect of the radio altimeter by the microcontroller.
3.2. Simulation of Dynamic Height Change
The initial measurement (using the depolarization panel through electromagnetic waves) of discrete height values in indoor laboratory conditions with the RV-5 radio altimeter was successful and well documented in [
11,
12]. Subsequently, they also proved to be successful measurements of dynamic height change in indoor laboratory conditions in the same assembly of the measuring chain [
11,
12]. The success of the measurement relates to a new method, using a patented depolarization panel, through which the reflections of electromagnetic waves from surrounding obstacles in the interior laboratory environment were significantly suppressed. The only disadvantage of this dynamic height change was the low speed of movement that could be achieved in the laboratory’s interior. Therefore, the laboratory measurements were moved from the interior to the exterior, where it was planned to use a car’s movement for the simulation of a dynamic change in height. In this type of measurement, it was assumed that if the parasitic reflections of the radio altimeter transmitted high frequency (HF) carrier signal were eliminated in the interior using the depolarization panel, the parasitic reflections in the exterior would also be eliminated (which was also confirmed in the exterior measurements) [
11,
24,
25].
We proceeded to the installation of a radio altimeter antenna system on the car (
Figure 8a) and the radio altimeter stand was installed into the interior together with all necessary equipment, like DC and AC power sources and computer with respective programs (
Figure 8b,c). The car’s speed was provided by its speed sensor, and the actual value was read through the OBD diagnostics port. Signals, which were measured and thus crucial for this evaluation, were the modulation signal and the difference frequency signal. They were measured by a National Instruments USB DAQ 6216 device. Signals were picked up from SB-5 (self-check control block for modulation signal) and MB-5 (measurement block for difference signal).
At first, we measured the difference frequency signal
fr at the output of the preamplifier of difference frequency signal (
Figure 9b). However, the signal was in its “raw” form, affected by different types of noises and the shape of the respective impulses was insufficient. Therefore, we decided to use the radio altimeter’s own filtering and shaping circuits, and we connected them to the output where the signals are conditioned (
Figure 9c).
The RV-5 type radio altimeter, which is the object of our research, uses several approaches to filter unwanted influences and stabilize the output information about the radio height. The first approach is the presence of so-called bandpass and bandstop filters, which create a total of four frequency characteristics. The RV-5 radio altimeter works with a frequency-modulated standing wave. A difference frequency is created by comparing the direct and reflected signal in the mixer, which can take values from 0 kHz to 150 kHz. The range of 0 kHz to 150 kHz corresponds to the range of 0 m to 750 m in height. To avoid the effect of coupling between antennas, intermodulations and multiple reflections from the ground, the following filters were used, which created a total of five frequency characteristics of the radio altimeter:
In the range of very low altitudes (0–25 m), the first bandpass filter works 0–5 kHz, which filters all higher frequencies above 5 kHz.
In the range of low heights (25–50 m), a second bandpass filter works, which filters frequencies up to 5 kHz and above 10 kHz.
In the range of medium heights (50–150 m), a third bandpass filter works, which filters frequencies up to 10 kHz and above 30 kHz.
In the range of high altitudes (150–250 m), a fourth bandpass filter works, which filters frequencies up to 30 kHz and from 50 kHz.
In the range of very high altitudes (250–750 m), a fifth bandpass filter works, which filters frequencies up to 50 kHz and above 160 kHz.
High-frequency and low-frequency filters were also included in the circuits of the radio altimeter, specifically in the circuit of the differential frequency amplifier, together with circuits for switching frequency characteristics.
In the measurement block, there is a noise separator circuit (
Figure 9c), the task of which is to shape the high impulses in such a way that during their subsequent integration into a direct current voltage, there is no erroneous evaluation of the impulses arising during the rotation of the phase of the high-frequency signal. Because measuring and evaluating only the Doppler frequency increase/decrease is complex and requires very precise timing, we decided to try a different approach. As part of testing the hypothesis and method, we decided to work with the evaluation of the difference in the number of impulses within the positive and negative part of one modulation period, which is reported as an error in height measurement due to the Doppler effect and causes the mentioned difference in the number of impulses. Thanks to the filters and the internal circuit solution of the radio altimeter, which has a stabilized modulation frequency, transmitter frequency, as well as circuits for automatic control and constant fine-tuning of the so-called constant of the radio altimeter, we could always rely on the entire number of height impulses taken from the radio altimeter measurement block.
With the radio altimeter mounted on the car, it was possible to simulate the dynamic change in the height of both types—the imaginary rise or descent of the aircraft/helicopter/UAV by approaching or retreating to the depolarization panel. In this way, it was possible to observe the emergence of a positive and a negative Doppler increase/decrease in frequency.
According to the hypothesis and mathematics in previous sections, the Doppler effect in radio altimeter circuits causes a frequency shift of the differential signal (
Figure 5 and
Figure 7). A positive or negative increment of the frequency difference makes it possible to determine whether the aircraft/helicopter/UAV is moving towards the earth’s surface—descending, or on the contrary, whether it is moving away—climbing. The magnitude of the frequency shift refers to the vertical component of the speed of this climb or descent.
After simulations of dynamic height changes using the car, it was necessary to analyze the measured data and reliably prove the presence of the Doppler frequency. The measured data were evaluated using the Matlab environment, for which a set of commands was designed (script), which divided the data of the measured difference frequency in the rhythm of the modulation frequency into positive and negative half-periods. Then we counted the number of impulses within the positive and negative half-periods, and finally evaluated whether this number of impulses within one period of the modulation signal was the same or different. This is because the Doppler shift will cause a difference in the number of impulses when comparing the positive and negative half of one modulation period (
Figure 10). When there is a positive Doppler frequency shift, the number of impulses will be higher in the positive half of the modulation period. When moving away from the depolarization panel, the Doppler shift will cause negative frequency, so the number of impulses in the first half of the modulation period will be lower than the number of impulses in the negative half period of the modulation signal [
26,
27,
28].
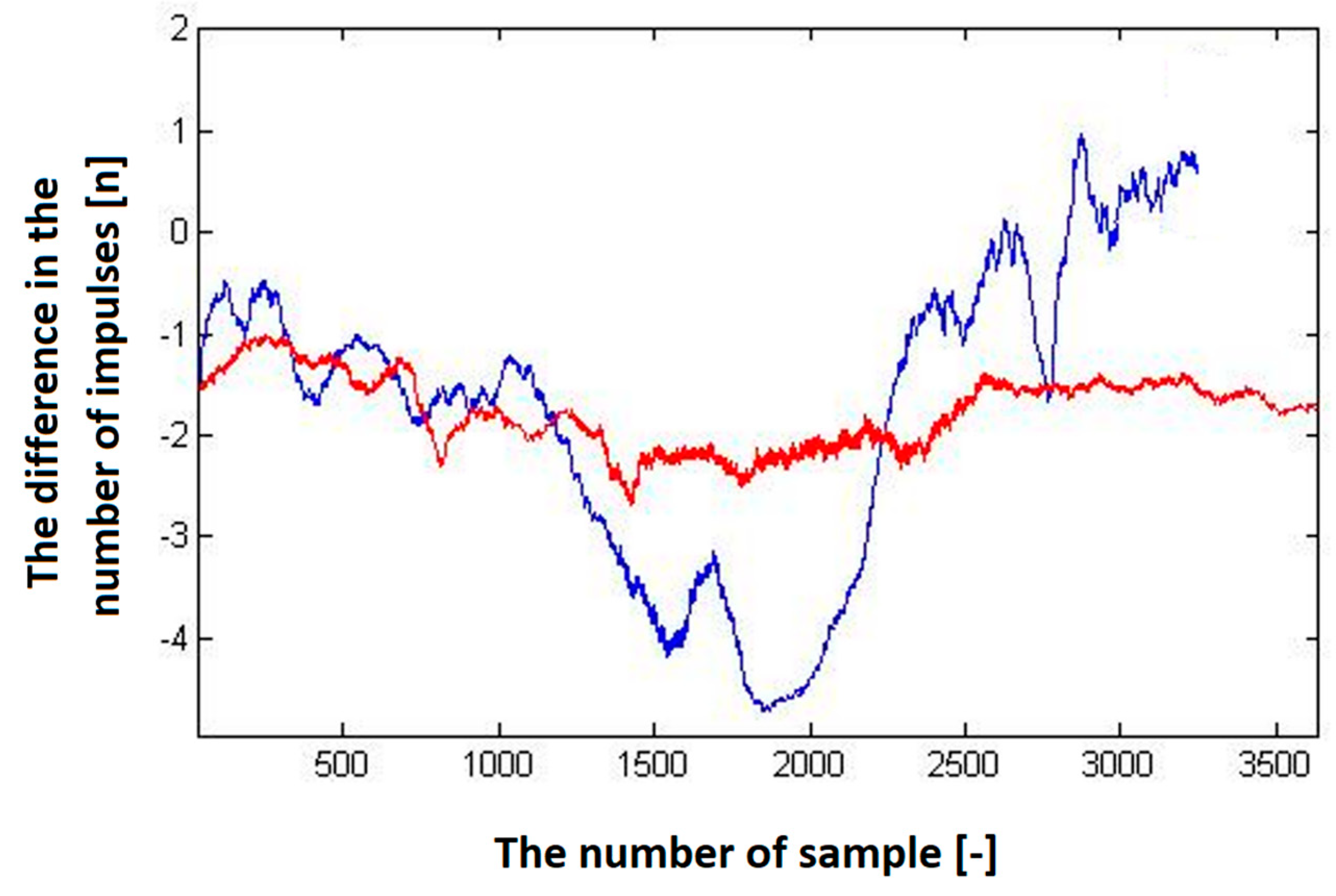
Several sets of measurements were performed with different speeds of movement of the car and alternating directions of movement (heading to the depolarization panel or moving away from the depolarization panel). To evaluate the presence of this imbalance in the number of impulses in half periods representing the modulating signal, we have decided to plot this difference in the following graphs to see if there will be an observable dependency, which could also be quantified. The resulting impulse difference from control measurements was plotted in the following graphs (
Figure 11 and
Figure 12).
The program’s final step was to plot the graphical dependence of the difference in the number of impulses over time. The previous graphs (
Figure 11 and
Figure 12), showed that the hypothesis was fulfilled. Therefore, with the increasing speed of the approach of the passenger car equipped with a radio altimeter towards the imaginary obstacle, the negative difference in the number of impulses increased proportionally to the speed. In addition, when the vehicle moved in the opposite direction from the panel, this difference in the number of impulses moved from the negative to the positive region. Consequently, the polarity of the difference in the number of impulses determines whether we are approaching or moving away from the obstacle [
29].
4. Implementation
Based on the results of previous experiments, we concluded that the simplest way of evaluating the occurrence of the Doppler frequency in radio altimeter circuits during a dynamic height change is to count the change in the number of impulses within the positive and negative half-period during one period of the modulation signal. This evaluation required creating a circuit that would divide the difference signal into sections of positive and negative half-periods in the rhythm of the modulation frequency. Subsequently, it would read the number of impulses in the thus-divided signal with two independent counters. The available technical solution used a programmable board equipped with a processor, converters, and various additional circuits—that is, a microcontroller.
Considering the available technical possibilities and our experience, the mbed Microcontroller (NXP LPC 17680) was chosen. This microcontroller uses an ARM Cortex M3 microprocessor operating at a clock frequency of 96 MHz. It has 512 KB of flash memory and 64 KB of RAM. It communicates with the environment using several buses, namely Ethernet, CAN, SPI, I2C or the USB. In addition, it contains a built-in A/D converter with a resolution of 12 bits.
The disadvantages of using a microcontroller include the necessary limitation of the level of input signals, which cannot exceed the level of 3.3 Volts; otherwise, the microcontroller circuits would be damaged. Moreover, the microcontroller with an integrated counter cannot process a negative polarity signal, so it was necessary to adjust the measuring chain, including the RV-5 stand (
Figure 13).
Reducing the level of the difference and modulation signal so that it does not exceed the amplitude of +3.3 V could be achieved simply by using a resistor divider with Zener diode. The difference signal changes its amplitude in the range of 0 V to +18 V; therefore, with the help of a resistor divider, this amplitude was reduced so that it did not exceed +2.8 V.
In the case of the modulating signal, the adjustment required several steps. First, the modulation signal was fed to the LM358N operational amplifier, where the input voltage was compared to zero potential. The output from the comparator was fed to a resistive divider so that the amplitude of the resulting signal did not exceed the range from 0 V to +3 V, and then this output was grounded via a semiconductor diode. This ensured that a negative polarity signal did not reach the microcontroller’s input. Subsequently, a program was designed, the task of which, similarly to the Matlab script, was to divide the difference signal in the rhythm of the modulation frequency into positive and negative half-periods, count the number of impulses within the positive and negative half-periods, and then subtract the number of impulses in the positive half-period from the number of impulses.
Data extraction from the microcontroller was performed using the serial monitor program (
Figure 14) with an integrated serial monitor. The first column (from the left) indicates the number of impulses in the positive half-period. The second column indicates the number of impulses in the negative half-period. The third column shows the sum of the number of impulses in the positive and negative half-periods, and the last, fourth column shows the difference in the number of impulses.
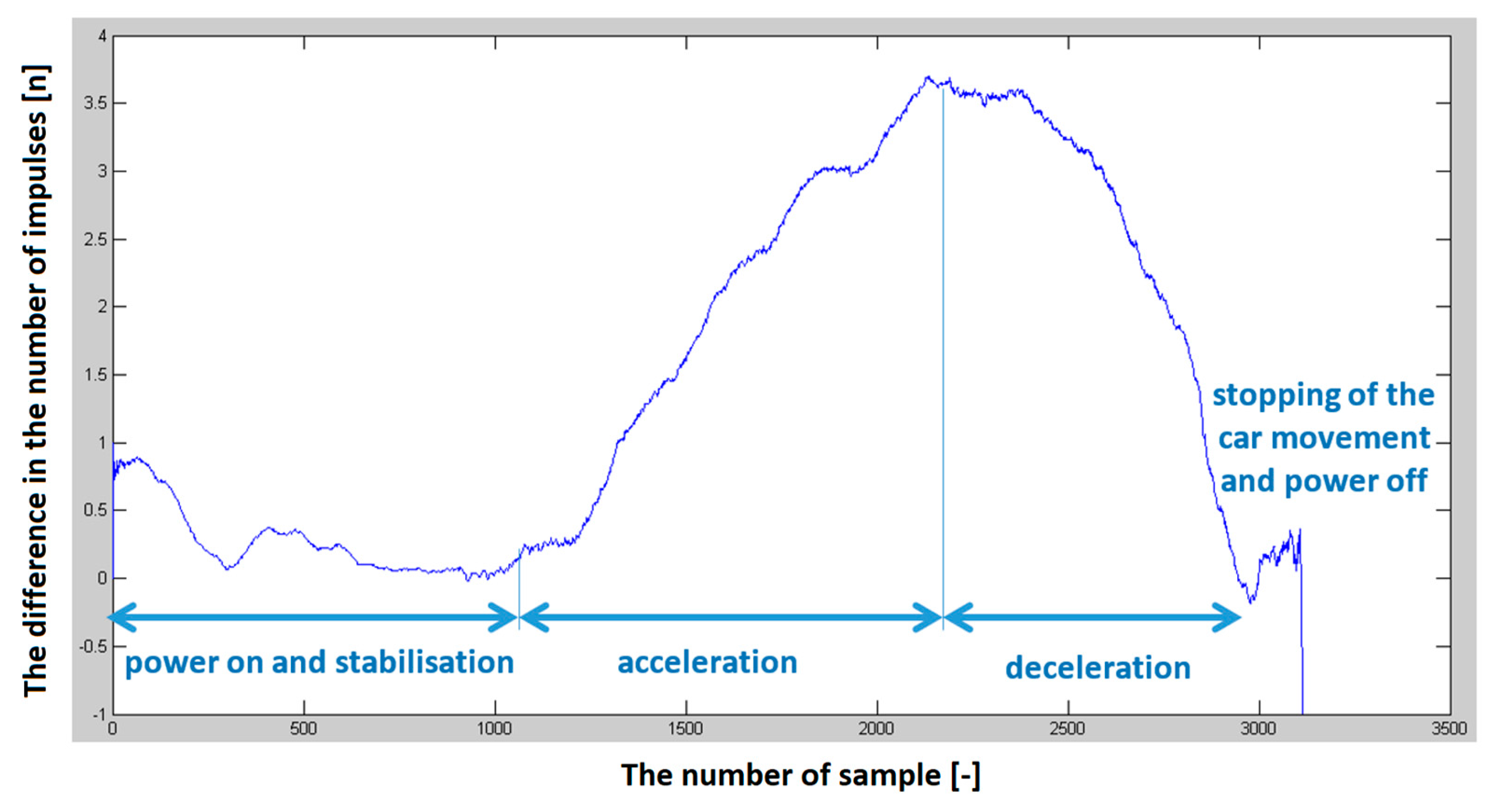
After testing the microcontroller and a series of programs, another verification measurement was carried out using the car. An approach towards the panel was performed at a constant low speed of approximately 30 kmh
−1. This verified the functionality of the entire connection and data collection system, and at the same time, reference data were measured for comparison. Subsequently, the measurement was performed in full acceleration mode, avoiding the panel, and then stopping. The measured data’s graphic evaluation is in
Figure 15.
After this verification, the function of the microcontroller was expanded to include signaling. First, only a simple function was added, which monitored the difference in the number of impulses. If this difference exceeds a preset value in three consecutive cases, the reading will stop, and the inscription “CAUTION” will be displayed on the screen. The program modified this way was loaded into the microcontroller, and a control measurement was carried out with a passenger car. After the successfully performed measurement, when the signaling functioned as expected, it was necessary to move on to the next step, which was to activate the chosen pin of the microcontroller when the given condition was met so that, for example, it lit up the LED diode (signal bulb) for a defined time. This modification was again tested using the car. Through this series of adjustments and verification measurements, a simple device capable of signaling the influence of the Doppler frequency on the difference in the number of impulses within one modulation period was obtained.
However, for the design of a simple “anti-collision system”, this preparation had to be suitably modified and supplemented with other functions and conditions. This is because such a system would signal any height change in the terrain below the aircraft/helicopter/UAV. It was necessary to consider defining a condition that would clearly define the flight height changes, and at the same time, a difference in the number of impulses within one modulation period arises due to the Doppler effect.
The solution was to create a ratio between the sum of the impulses and the difference in the number of impulses. The sum of the number of impulses represents information about the actual flight height. And the difference in the number of impulses about the presence and size of the Doppler frequency. This ratio determines the time when the actual flight height will be zero, i.e., an imaginary impact (loss of radio altitude) with a terrain obstacle will occur. This condition was subsequently incorporated into the microcontroller program.
Another condition incorporated into the program was the setting of the so-called dead band, i.e., the program monitored the total number of impulses and stored this value in the cache memory. Afterwards, it compared this value with the reference value, which was set to the level of 160 impulses, while this number of impulses corresponds to a difference frequency of 50 kHz. This frequency corresponds to a height of 100 m. This condition established that the circuit will not signal danger if the measured height is above 100 m. Suppose the number of impulses falls below the preset value. In that case, the Doppler frequency monitoring circuit is activated—a difference in the number of impulses within the half-period of the modulation signal is created. This difference in the number of impulses is then proportional to the number of all impulses.
After defining the mentioned conditions in the program and then uploading the program to the microcontroller, the test measurement with the car was started according to the proven scenario. After a thorough analysis of the experiment scenario, the approach speeds to the depolarization panel were determined at 30 kmh−1, 40 kmh−1, 60 kmh−1, 70 kmh−1, 80 kmh−1 and 90 kmh−1. Based on previously conditions and previously measured data, the ratio of the number of all impulses to the number of differential impulses was set in the microcontroller program. Therefore, the signaling is triggered when the height falls below 100 m and is triggered if the difference in the number of impulses is more than 4. The trigger was set to start signalization of danger 3 to 5 s before the radio altitude loss (simulated impact with the obstacle).
The first test was carried out at a speed of 30 kmh−1 when the correctness of the connection and assembly of the entire measuring assembly and the stand were verified. It was monitored whether the radio altimeter would correctly display the simulated height during the entire route, whether the data recording would function reliably and whether false signaling would not occur.
The second test was carried out at a speed of 30 kmh
−1, the difference in the number of impulses was constant with the value of −1 impulses (
Figure 16).
At an approach speed of 40 kmh
−1, the difference in the number of impulses began to reach the value of −2 impulses (
Figure 17). At an approach speed of 60 kmh
−1, the difference in the number of impulses began to exceed the value of −2 impulses (
Figure 18). At a speed of 70 kmh
−1, the difference in the number of impulses already exceeded the limit of the difference of −3 impulses and was approaching the limit of the difference of −4 impulses. From the progress so far, the dependence of the change in the number of impulses due to the Doppler effect on the speed of approaching the panel is linear. We have also performed a set of measurements (10 times at each approach speed) to evaluate the results and the method. The average value of the difference in the number of impulses is shown in
Table 1.
After a series of previous attempts, the final phase of the experiment was reached, when signaling was expected to start. At a speed of 85 kmh−1, the signaling turned on approximately 70 meters from the depolarization panel and lasted less than 3 seconds, precisely during the time when the microcontroller evaluated that the predetermined conditions were met.
The graphic evaluation (
Figure 19) shows that the difference in the number of impulses exceeded the set limit of at least −4 impulses and even approached the limit of a difference of up to −5 impulses.
During experiments, the question of which speed range of movement of the aircraft/helicopter/UAV this method will be meaningful and purposeful for was raised. The entire consideration will be based on
Table 2. Each measured value of the speed of a moving vehicle can be assigned the number of evaluated impulses “N” of the difference frequency “
fr” in both half-periods of the modulation frequency
fM, (column e). The speed of the vehicle moving along the road in [km·h
−1] (column c) represents, in our case, the vertical component of the speed of the flying vehicle over the terrain. The measured value of the vehicle speed [km·h
−1] is therefore converted to the vertical component of the speed in [m·s
−1] (column d). Then, using relationship (20), each speed (column d) can be converted to a Doppler frequency value (column f).
Each vertical velocity component created by an approaching or receding terrain relief can be assigned the value of the cruising speed of an imaginary vehicle flying in a horizontal plane. However, the speed’s vertical component is determined by the aircraft/helicopter/UAV’s horizontal cruising speed and the steepness of the terrain obstacle (hill). From Equations (18) and (19), the ratio between the aircraft’s/helicopter’s/UAV‘s forward speed and the vertical component of the speed when flying uphill can be determined. The steepness of the relief of this hill represents a statistically optimal shape; therefore, according to the value of the angle of attack “tanβ = 0.74”, all values of the cruise speed (column b) of
Table 2 were recalculated. By experimental measurement and calculation, the values in rows 3 to 8 of the given table were defined. Because the dependence of the Doppler frequency generation is linear, the remaining values of lines 1–3 and 9–18 in
Table 2 were defined only by calculation.
From
Table 2, it is evident that the smallest cruising speed (54 kmh
−1) of the aircraft over the terrain that defines the vertical component of the speed (11.11 ms
−1) at which an additional measurable Doppler frequency (326 Hz) is created, is defined in line 4 (
Table 2). Adequate values measured and calculated from an experiment on a real helicopter flying over real terrain are given in line 11 (
Table 2).
The analyzed scenarios and radio altimeter principle is considered for small aircraft flying with a minimum speed of approximately 100 km·h−1. In this case, the method should work reliably.
5. Conclusions
Radio altimeters are nowadays used in most aircraft and helicopters to obtain information about actual altitude (real) above the terrain. This information is useful and even crucial for a group of aircraft (avionic) systems, like auto-flight and anti-collision systems. The growing market with UAVs also creates space for the use of radio altimeters in this category of aircraft.
The radio altitude measurement accuracy is usually ± 30 cm on the most commonly used devices. This altitude measurement is affected by several negative factors, some of which could be solved or affected by signal filtration or additional internal circuitry or by a change of principle of operation. One of these factors is the Doppler shift effect, which occurs when there is a dynamic change in altitude (climb or descend). This Doppler frequency shift represents only a 4% share in the total inaccuracy of measurement, so in general, this error could be omitted. However, the authors’s team had an idea that this generally known measurement error could possibly be transformed into useful information.
For the solving of the initial hypothesis, that the Doppler shift error could be a carrier of useful information, a set of experiments was performed. The initial one was the flight experiment, which demonstrated the capability of measurement of Doppler shift in difference frequency signals. According to this, we created the mathematical theory of how it affects the creation of differential frequency. Because flight experiments are expensive, we were forced to find another solution for the simulation of dynamic altitude change of the radio altimeter.
The experiment with the depolarization panel demonstrated the applicability of the method of simulating dynamic height changes using a car and simultaneously confirmed the validity of the initially established hypothesis—that the Doppler shift of radio altimeter differential signal could be used as a source of information for the potential loss of radio altitude. The differential signal of the radio altimeter demonstrably contains (in the case of a dynamic change in height) a Doppler frequency shift, which can be used after correct detection to signal an imminent collision with an obstacle. The experiment also verified the functionality of a simple additional circuit based on a microcontroller, which was able to record the presence of the Doppler effect in the circuits of the radio altimeter and trigger signaling based on preset conditions. Furthermore, the microcontroller did not issue incorrect (false) warnings during experiments.
By adding a relatively small circuit to the original radio altimeter, without significant intervention in its design, its original functions can be significantly expanded with a new function. This predictive warning warns the crew during the flight of the danger of a possible collision with an obstacle. In this article, we showed that transforming one of the height measurement errors into a substantial advantage to increase the safety of flights and air traffic is possible. However, the method presented in this article is not final and needs to be thoroughly examined.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}