


Assessment of Three-Dimensional Kinematics of High- and Low-Calibre Hockey Skaters on Synthetic Ice Using Wearable Sensors

Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
2.2. Experiments
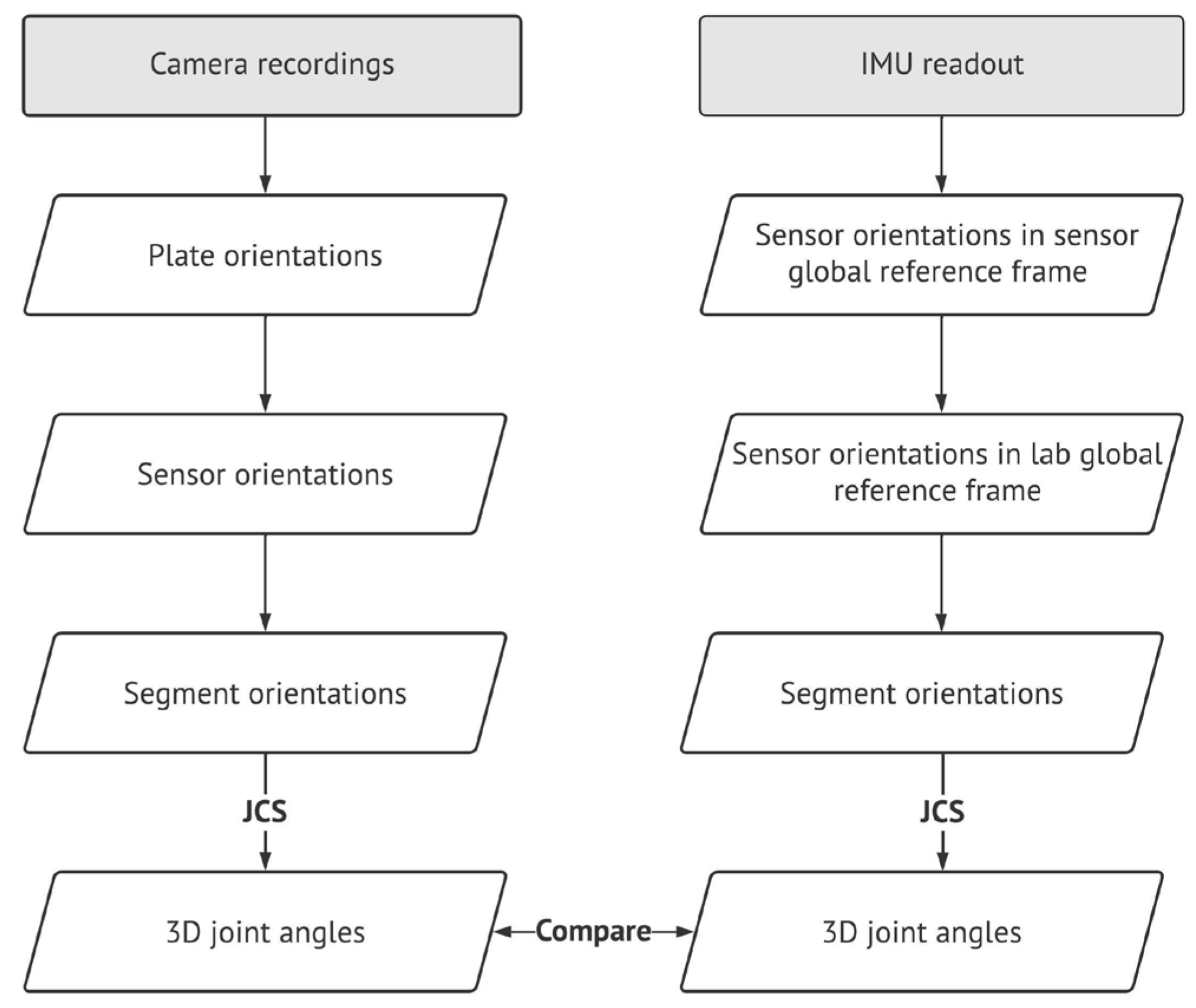
2.3. 3D Joint Angles Validation
- The RMS errors between IMU-based and camera recordings-based angles for each trial of all participants were calculated;
- The average of the RMS error was calculated over all trials of each participant;
- The computed average value for each participant is presented as boxplots for each 3D joint angle.
2.4. Calibre-Based Classification Analysis
- Each of the five trials of the participant was labelled according to the participant’s calibre;
- Three participants’ data (25% of the data) were randomly selected and added to the testing set, and the other participants’ data (75% of the data) were added to the training set;
- A KNN classification was trained for k = 1 to k = 15, and the sensitivity, specificity, precision, and accuracy of these classifiers were calculated for the testing set;
- Steps (1–3) were repeated 12 times so that each participant was added to the testing set three times;
- The average of all obtained sensitivity, specificity, precision, and accuracy for these repeated measures was calculated for each k.
3. Results
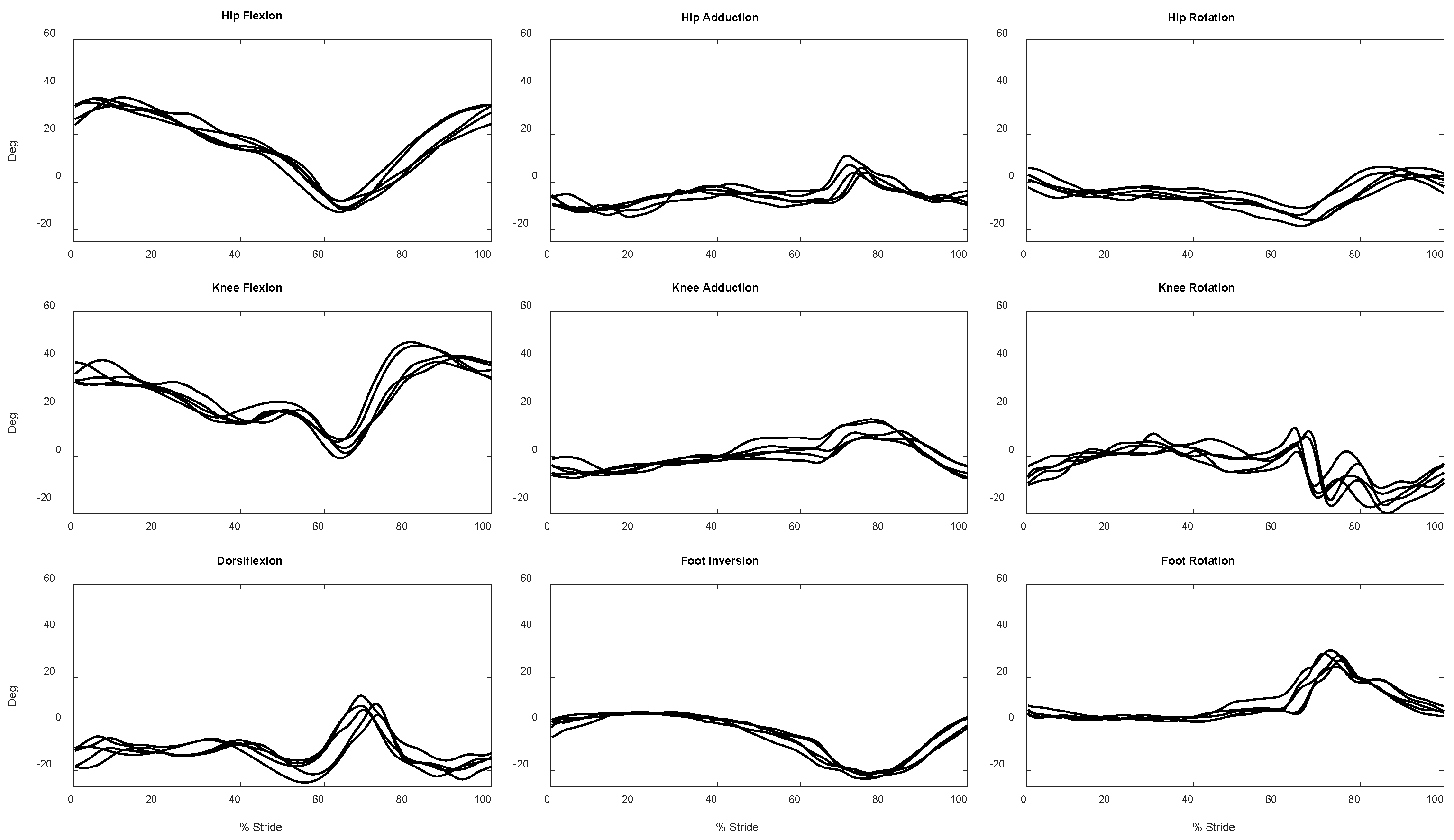
3.1. 3D Joint Angles Validation
3.2. Calibre-Based Classification Analysis
4. Discussion
- Lack of familiarity with skating on synthetic ice may have affected the skating patterns of the participants since most of the study’s participants, even high-calibre ones, had not had much experience with synthetic ice skating prior to the skating sessions.
- Skating on a shorter distance—here, a 14 m-distance—requires faster acceleration and deceleration than real ice skating [26], which could affect the skating patterns of the participants on the synthetic surfaces.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pearsall, D.J.; Turcotte, R.A.; Murphy, S.D. Biomechanics of Ice Hockey. Exerc. Sport Sci. 2000, 43, 675–692. [Google Scholar]
- Percival, L. The Hockey Handbook; McClelland & Stewart Limited: Toronto, ON, Canada, 1997. [Google Scholar]
- Mullen, A.J. A Biomechanical Comparison between Novice and Elite Ice Hockey Skaters. Master’s Thesis, McGill University, Montreal, QC, Canada, 1992. [Google Scholar]
- Upjohn, T.; Turcotte, R.; Pearsall, D.J.; Loh, J. Three-dimensional kinematics of the lower limbs during forward ice hockey skating. Sports Biomech. 2008, 7, 206–221. [Google Scholar] [CrossRef] [PubMed]
- Hellyer, M.R.; Alexander, M.J.; Glazebrook, C.M.; Leiter, J. Differences in Lower Body Kinematics during Forward Treadmill Skating Between Two Different Hockey Skate Designs. Int. J. Kinesiol. Sports Sci. 2016, 4, 1–16. [Google Scholar]
- Renaud, P.J.; Robbins, S.M.K.; Dixon, P.C.; Shell, J.R.; Turcotte, R.A.; Pearsall, D.J. Ice hockey skate starts: A comparison of high and low calibre skaters. Sports Eng. 2017, 20, 255–266. [Google Scholar] [CrossRef]
- Lafontaine, D. Three-dimensional kinematics of the knee and ankle joints for three consecutive push-offs during ice hockey skating starts. Sports Biomech. 2007, 6, 391–406. [Google Scholar] [CrossRef] [PubMed]
- Budarick, A. Ice Hockey Skating Mechanics: Transition from Start to Maximum Speed for Elite Male and Female Athletes; McGill University Libraries: Montreal, QC, Canada, 2017. [Google Scholar]
- Shell, J.R.; Robbins, S.M.K.; Dixon, P.C.; Renaud, P.J.; Turcotte, R.A.; Wu, T.; Pearsall, D.J. Skating start propulsion: Three-dimensional kinematic analysis of elite male and female ice hockey players. Sports Biomech. 2017, 16, 313–324. [Google Scholar] [CrossRef]
- Turcotte, R.A.; Pearsall, D.J.; Montgomery, D.L.; Lefebvre, R.; Ofir, D.; Loh, J.J. Comparison of Ice Versus Treadmill Skating—Plantar Force Distribution Patterns. In Safety in Ice Hockey: Fourth Volume; ASTM International: West Conshohocken, PA, USA, 2004. [Google Scholar]
- Chambers, R.; Gabbett, T.J.; Cole, M.H.; Beard, A. The Use of Wearable Microsensors to Quantify Sport-Specific Movements. Sports Med. 2015, 45, 1065–1081. [Google Scholar] [CrossRef]
- Hurst, H.T.; Swarén, M.; Hébert-Losier, K.; Ericsson, F.; Sinclair, J.; Atkins, S.; Holmberg, H.-C. GPS-Based Evaluation of Activity Profiles in Elite Downhill Mountain Biking and the Influence of Course Type. J. Sci. Cycl. 2013, 2, 25–32. [Google Scholar]
- Vickery, W.M.; Dascombe, B.J.; Baker, J.D.; Higham, D.G.; Spratford, W.A.; Duffield, R. Accuracy and Reliability of GPS Devices for Measurement of Sports-Specific Movement Patterns Related to Cricket, Tennis, and Field-Based Team Sports. J. Strength Cond. Res. 2014, 28, 1697–1705. [Google Scholar] [CrossRef]
- Loader, J.; Montgomery, P.G.; Williams, M.D.; Lorenzen, C.; Kemp, J. Classifying Training Drills Based on Movement Demands in Australian Football. Int. J. Sports Sci. Coach. 2012, 7, 57–67. [Google Scholar] [CrossRef] [Green Version]
- Boyd, L.J.; Ball, K.; Aughey, R.J. The Reliability of MinimaxX Accelerometers for Measuring Physical Activity in Australian Football. Int. J. Sports Physiol. Perform. 2011, 6, 311–321. [Google Scholar] [CrossRef] [PubMed]
- Stetter, B.; Buckeridge, E.; Von Tscharner, V.; Nigg, S.R.; Nigg, B.M. A Novel Approach to Determine Strides, Ice Contact, and Swing Phases During Ice Hockey Skating Using a Single Accelerometer. J. Appl. Biomech. 2016, 32, 101–106. [Google Scholar] [CrossRef] [PubMed]
- Stetter, B.J.; Buckeridge, E.; Nigg, S.R.; Sell, S.; Stein, T. Towards a wearable monitoring tool for in-field ice hockey skating performance analysis. Eur. J. Sport Sci. 2019, 19, 893–901. [Google Scholar] [CrossRef]
- Fathian, R.; Khandan, A.; Chiu, L.Z.F.; Rouhani, H. Assessment of countermovement jump with and without arm swing using a single inertial measurement unit. Sports Biomech. 2022, 21, 1–18. [Google Scholar] [CrossRef] [PubMed]
- Buckeridge, E.; LeVangie, M.C.; Stetter, B.; Nigg, S.R.; Nigg, B.M. An On-Ice Measurement Approach to Analyse the Biomechanics of Ice Hockey Skating. PLoS ONE 2015, 10, e0127324. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmadian, N.; Nazarahari, M.; Whittaker, J.L.; Rouhani, H. Quantification of Triple Single-Leg Hop Test Temporospatial Parameters: A Validated Method Using Body-Worn Sensors for Functional Evaluation after Knee Injury. Sensors 2020, 20, 3464. [Google Scholar] [CrossRef] [PubMed]
- Ahmadian, N.; Nazarahari, M.; Whittaker, J.L.; Rouhani, H. Instrumented triple single-leg hop test: A validated method for ambulatory measurement of ankle and knee angles using inertial sensors. Clin. Biomech. 2020, 80, 105134. [Google Scholar] [CrossRef]
- Seel, T.; Raisch, J.; Schauer, T. IMU-Based Joint Angle Measurement for Gait Analysis. Sensors 2014, 14, 6891–6909. [Google Scholar] [CrossRef] [Green Version]
- Khandan, A.; Fathian, R.; Carey, J.P.; Rouhani, H. Measurement of temporal and spatial parameters of ice hockey skating using a wearable system. Sci. Rep. 2022, 12, 22280. [Google Scholar] [CrossRef]
- Caitlin, M.; Mazurek, D.J.; Pearsall, P.J.; Renaud, S.M.R. Differences in Inter-Joint Coordination between High- and Low-Calibre Ice Hockey Players during Forward Skating. Sports Biomech. 2020, 19, 1–16. [Google Scholar]
- Robbins, S.M.; Renaud, P.J.; Pearsall, D.J. Principal component analysis identifies differences in ice hockey skating stride between high- and low-calibre players. Sports Biomech. 2018, 20, 131–149. [Google Scholar] [CrossRef] [PubMed]
- Stidwill, T.J.; Pearsall, D.; Turcotte, R. Comparison of skating kinetics and kinematics on ice and on a synthetic surface. Sports Biomech. 2010, 9, 57–64. [Google Scholar] [CrossRef] [PubMed]
- Paulich, M.; Schepers, M.; Rudigkeit, N.; Bellusci, G. Xsens MTw Awinda: Miniature Wireless Inertial-Magnetic Motion Tracker for Highly Accurate 3D Kinematic Applications; Xsens: Enschede, The Netherlands, 2018. [Google Scholar]
- Merriaux, P.; Dupuis, Y.; Boutteau, R.; Vasseur, P.; Savatier, X. A Study of Vicon System Positioning Performance. Sensors 2017, 17, 1591. [Google Scholar] [CrossRef] [PubMed]
- Cappozzo, A.; Catani, F.; Della Croce, U.; Leardini, A. Position and orientation in space of bones during movement: Anatomical frame definition and determination. Clin. Biomech. 1995, 10, 171–178. [Google Scholar] [CrossRef] [PubMed]
- Madgwick, S.O.H.; Harrison, A.J.L.; Vaidyanathan, R. Estimation of IMU and MARG orientation using a gradient descent algorithm. In Proceedings of the 2011 IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar]
- Nazarahari, M.; Rouhani, H. Sensor fusion algorithms for orientation tracking via magnetic and inertial measurement units: An experimental comparison survey. Inf. Fusion 2021, 76, 8–23. [Google Scholar] [CrossRef]
- Nazarahari, M.; Rouhani, H. 40 years of sensor fusion for orientation tracking via magnetic and inertial measurement units: Methods, lessons learned, and future challenges. Inf. Fusion 2021, 68, 67–84. [Google Scholar] [CrossRef]
- Nazarahari, M.; Noamani, A.; Ahmadian, N.; Rouhani, H. Sensor-to-body calibration procedure for clinical motion analysis of lower limb using magnetic and inertial measurement units. J. Biomech. 2019, 85, 224–229. [Google Scholar] [CrossRef]
- Nazarahari, M.; Rouhani, H. Semi-Automatic Sensor-to-Body Calibration of Inertial Sensors on Lower Limb Using Gait Recording. IEEE Sensors J. 2019, 19, 12465–12474. [Google Scholar] [CrossRef]
- Noamani, A.; Nazarahari, M.; Lewicke, J.; Vette, A.H.; Rouhani, H. Validity of using wearable inertial sensors for assessing the dynamics of standing balance. Med Eng. Phys. 2020, 77, 53–59. [Google Scholar] [CrossRef]
- Grood, E.S.; Suntay, W.J. A Joint Coordinate System for the Clinical Description of Three-Dimensional Motions: Application to the Knee. J. Biomech. Eng. 1983, 105, 136–144. [Google Scholar] [CrossRef]
- Poitras, I.; Dupuis, F.; Bielmann, M.; Campeau-Lecours, A.; Mercier, C.; Bouyer, L.; Roy, J.-S. Validity and Reliability of Wearable Sensors for Joint Angle Estimation: A Systematic Review. Sensors 2019, 19, 1555. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Khandan, A.; Fathian, R.; Carey, J.P.; Rouhani, H. Comparison of High- and Low-Calibre Ice Skaters Stride Time and Stride Length on a Synthetic Ice Surface. In Proceedings of the Canadian Society for Mechanical Engineering International Congress, Edmonton, AB, Canada, 5–8 June 2022. [Google Scholar]
- van Dongen, M.E.H.; Smeulders, D.M.J. Ice speed skating: Onset of lubrication by frictional heating. Eur. Lett. 2021, 134, 34005. [Google Scholar] [CrossRef]
- Jobse, H.; Schuurhof, R.; Cserep, F.; Schreurs, A.W.; De Koning, J.J. Measurement of Push-Off Force and Ice Friction during Speed Skating. Int. J. Sport Biomech. 1990, 6, 92–100. [Google Scholar] [CrossRef]
- Li, Z.; Li, G.; Qu, Y.; Wang, Y. Experimental Friction Coefficients between DUT-1 Synthetic Model Ice and Materials. In Proceedings of the Eleventh International Offshore and Polar Engineering Conference, Stavanger, Norway, 17–22 June 2001. [Google Scholar]
- Faul, F.; Erdfelder, E.; Lang, A.-G.; Buchner, A. G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Friedman Test (p-Value) |
|---|---|
| Dorsiflexion range * | 0.03 |
| Ankle adduction at the end of push-off instant | 0.80 |
| Hip flexion in initial contact instant | 0.67 |
| Hip adduction in push-off instant * | 0.03 |
| Hip adduction at initial contact instant | 0.15 |
| Dorsiflexion in push-off instant | 0.39 |
| Knee flexion in push-off instant * | 0.03 |
| Hip flexion average | 0.73 |
| The interquartile range of CoM 1 motion 2 in the body mediolateral plane | 0.23 |
| Range of CoM motion in the body’s mediolateral plane | 0.67 |
| The interquartile range of CoM 1 motion 2 in the body sagittal plane | 0.73 |
| Range of CoM motion in the body sagittal plane | 0.67 |
| K | Sensitivity (%) | Specificity (%) | Accuracy (%) | Precision (%) | |
|---|---|---|---|---|---|
| Using the selected features | 1 | 59 | 86 | 64 | 75 |
| 3 | 67 | 82 | 67 | 71 | |
| 5 | 60 | 72 | 58 | 69 | |
| 7 | 50 | 72 | 54 | 70 | |
| 9 | 46 | 70 | 51 | 70 | |
| 11 | 52 | 61 | 50 | 63 | |
| 13 | 50 | 61 | 47 | 59 | |
| 15 | 50 | 61 | 47 | 68 | |
| The three best features obtained from PCA | 1 | 71 | 58 | 58 | 71 |
| 3 | 61 | 60 | 55 | 68 | |
| 5 | 61 | 66 | 57 | 70 | |
| 7 | 54 | 68 | 54 | 69 | |
| 9 | 53 | 75 | 57 | 74 | |
| 11 | 48 | 73 | 53 | 69 | |
| 13 | 48 | 72 | 53 | 70 | |
| 15 | 46 | 78 | 55 | 74 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khandan, A.; Fathian, R.; Carey, J.P.; Rouhani, H. Assessment of Three-Dimensional Kinematics of High- and Low-Calibre Hockey Skaters on Synthetic Ice Using Wearable Sensors. Sensors 2023, 23, 334. https://doi.org/10.3390/s23010334
Khandan A, Fathian R, Carey JP, Rouhani H. Assessment of Three-Dimensional Kinematics of High- and Low-Calibre Hockey Skaters on Synthetic Ice Using Wearable Sensors. Sensors. 2023; 23(1):334. https://doi.org/10.3390/s23010334
Chicago/Turabian StyleKhandan, Aminreza, Ramin Fathian, Jason P. Carey, and Hossein Rouhani. 2023. "Assessment of Three-Dimensional Kinematics of High- and Low-Calibre Hockey Skaters on Synthetic Ice Using Wearable Sensors" Sensors 23, no. 1: 334. https://doi.org/10.3390/s23010334
APA StyleKhandan, A., Fathian, R., Carey, J. P., & Rouhani, H. (2023). Assessment of Three-Dimensional Kinematics of High- and Low-Calibre Hockey Skaters on Synthetic Ice Using Wearable Sensors. Sensors, 23(1), 334. https://doi.org/10.3390/s23010334