
Mapping Understory Vegetation Density in Mediterranean Forests: Insights from Airborne and Terrestrial Laser Scanning Integration




Abstract
:1. Introduction
2. Materials and Methods
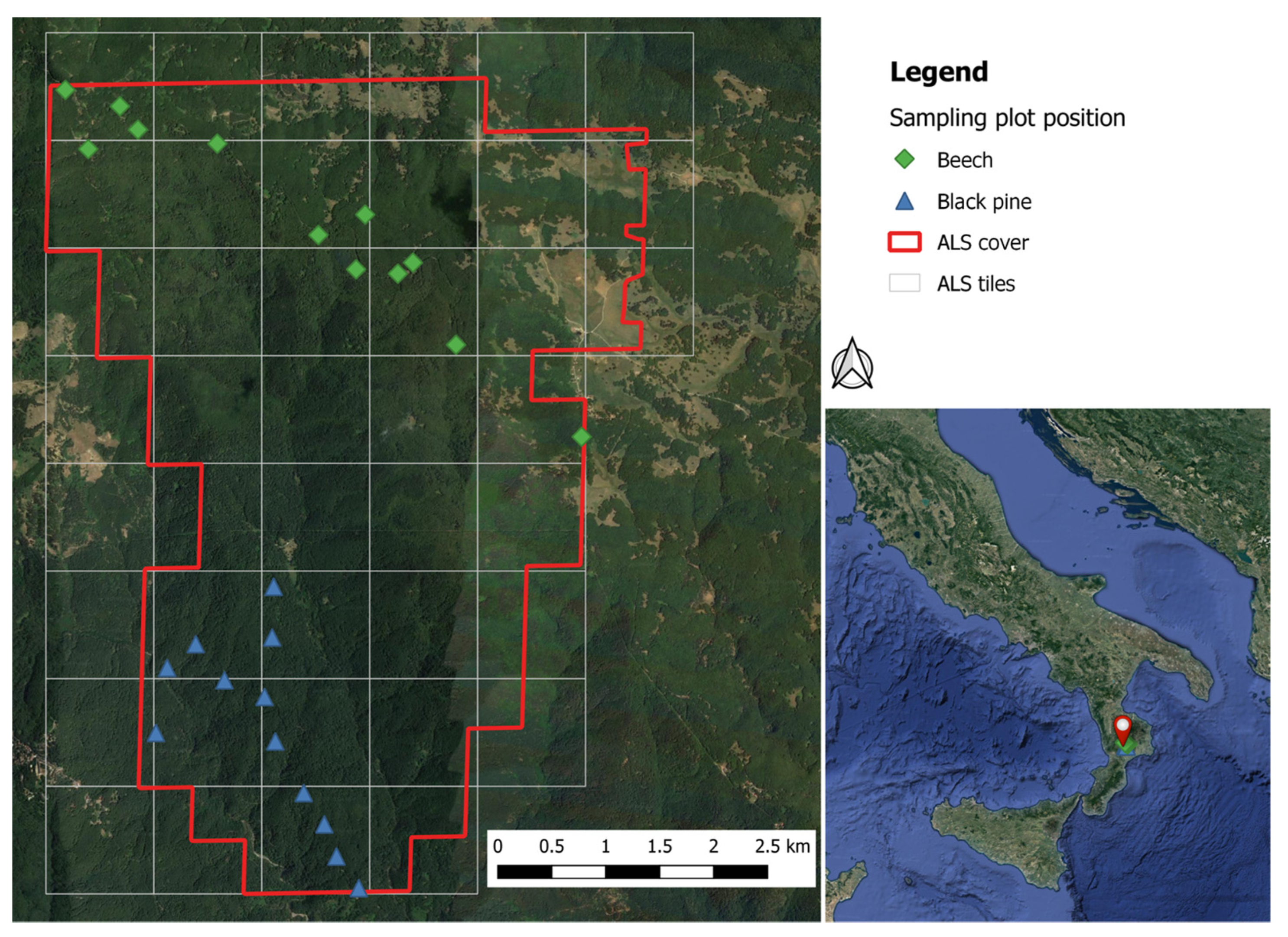
2.1. Study Site and Reference Data
2.2. Quantifying Understory Vegetation Densities using TLS Data
2.3. Modeling Understory Vegetation Density Using ALS Metrics
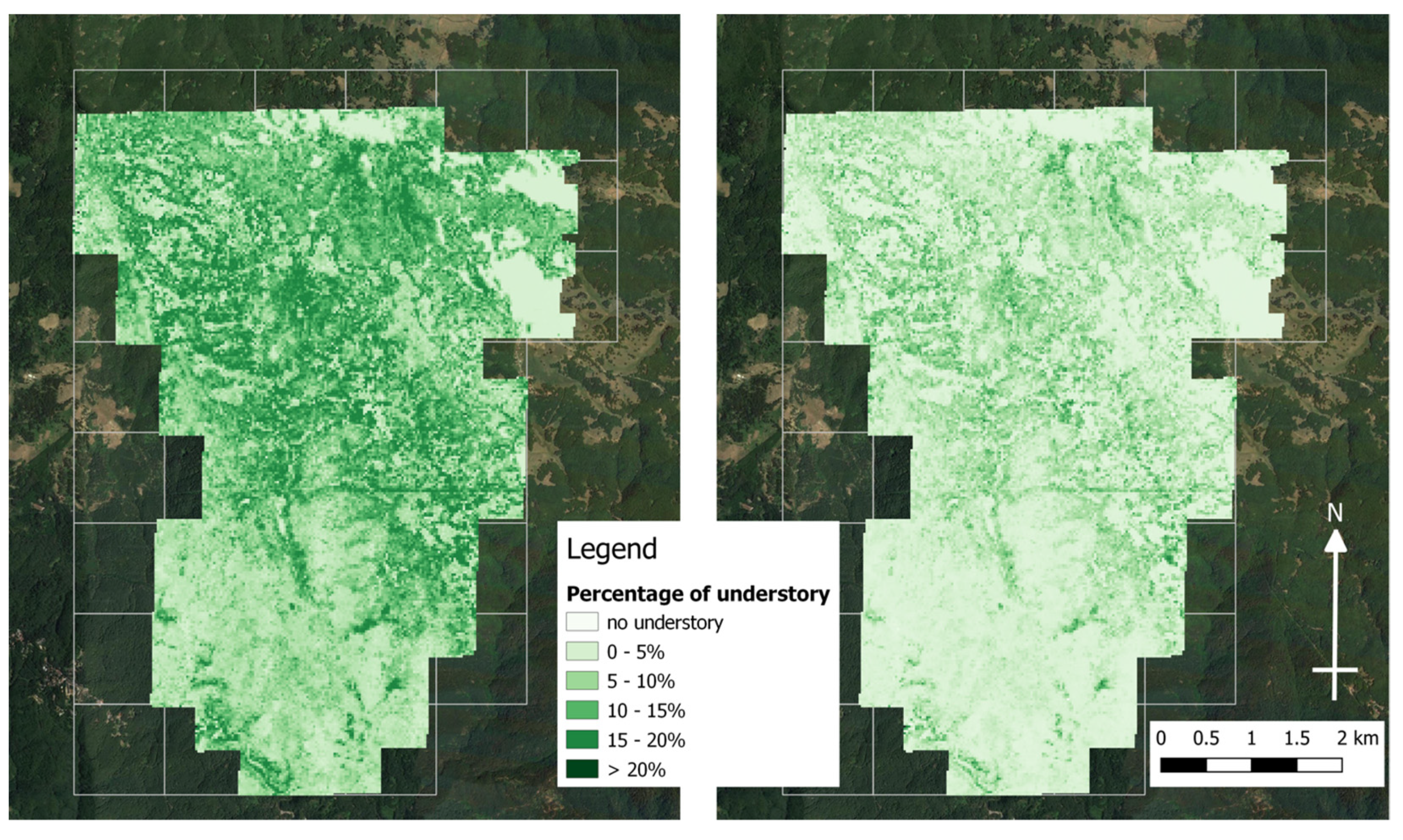
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Martinuzzi, S.; Vierling, L.A.; Gould, W.A.; Falkowski, M.J.; Evans, J.S.; Hudak, A.T.; Vierling, K.T. Mapping Snags and Understory Shrubs for a LiDAR-Based Assessment of Wildlife Habitat Suitability. Remote Sens. Environ. 2009, 113, 2533–2546. [Google Scholar] [CrossRef] [Green Version]
- Galluzzi, M.; Puletti, N.; Armanini, M.; Chirichella, R.; Mustoni, A. Mobile Laser Scanner Understory Characterization: An Exploratory Study on Hazel Grouse in Italian Alps. bioRxiv 2022. [Google Scholar] [CrossRef]
- Suchar, V.A.; Crookston, N.L. Understory Cover and Biomass Indices Predictions for Forest Ecosystems of the Northwestern United States. Ecol. Indic. 2010, 10, 602–609. [Google Scholar] [CrossRef]
- Estornell, J.; Ruiz, L.A.; Velázquez-Martí, B.; Fernández-Sarría, A. Estimation of Shrub Biomass by Airborne LiDAR Data in Small Forest Stands. For. Ecol. Manag. 2011, 262, 1697–1703. [Google Scholar] [CrossRef] [Green Version]
- Keane, R.E. Wildland Fuel Fundamentals and Applications; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; ISBN 978-3-319-09014-6. [Google Scholar]
- Wing, B.M.; Ritchie, M.W.; Boston, K.; Cohen, W.B.; Gitelman, A.; Olsen, M.J. Prediction of Understory Vegetation Cover with Airborne Lidar in an Interior Ponderosa Pine Forest. Remote Sens. Environ. 2012, 124, 730–741. [Google Scholar] [CrossRef]
- Ashcroft, M.B.; Gollan, J.R.; Ramp, D. Creating Vegetation Density Profiles for a Diverse Range of Ecological Habitats Using Terrestrial Laser Scanning. Methods Ecol. Evol. 2014, 5, 263–272. [Google Scholar] [CrossRef] [Green Version]
- McDermid, G.J.; Franklin, S.E.; LeDrew, E.F. Remote Sensing for Large-Area Habitat Mapping. Prog. Phys. Geogr. Earth Environ. 2005, 29, 449–474. [Google Scholar] [CrossRef]
- Campbell, M.J.; Dennison, P.E.; Hudak, A.T.; Parham, L.M.; Butler, B.W. Quantifying Understory Vegetation Density Using Small-Footprint Airborne Lidar. Remote Sens. Environ. 2018, 215, 330–342. [Google Scholar] [CrossRef]
- Disney, M. Terrestrial LiDAR: A Three-Dimensional Revolution in How We Look at Trees. New Phytol. 2019, 222, 1736–1741. [Google Scholar] [CrossRef] [Green Version]
- Grotti, M.; Calders, K.; Origo, N.; Puletti, N.; Alivernini, A.; Ferrara, C.; Chianucci, F. An Intensity, Image-Based Method to Estimate Gap Fraction, Canopy Openness and Effective Leaf Area Index from Phase-Shift Terrestrial Laser Scanning. Agric. For. Meteorol. 2020, 280, 107766. [Google Scholar] [CrossRef]
- Puletti, N.; Grotti, M.; Ferrara, C.; Chianucci, F. Lidar-Based Estimates of Aboveground Biomass through Ground, Aerial, and Satellite Observation: A Case Study in a Mediterranean Forest. J. Appl. Remote Sens. 2020, 14, 044501. [Google Scholar] [CrossRef]
- Puletti, N.; Galluzzi, M.; Grotti, M.; Ferrara, C. Characterizing Subcanopy Structure of Mediterranean Forests by Terrestrial Laser Scanning Data. Remote Sens. Appl. Soc. Environ. 2021, 24, 100620. [Google Scholar] [CrossRef]
- Puletti, N.; Grotti, M.; Masini, A.; Bracci, A.; Ferrara, C. Enhancing Wall-to-Wall Forest Structure Mapping through Detailed Co-Registration of Airborne and Terrestrial Laser Scanning Data in Mediterranean Forests. Ecol. Inform. 2022, 67, 101497. [Google Scholar] [CrossRef]
- Vierling, L.A.; Xu, Y.; Eitel, J.U.H.; Oldow, J.S. Shrub Characterization Using Terrestrial Laser Scanning and Implications for Airborne LiDAR Assessment. Can. J. Remote Sens. 2013, 38, 709–722. [Google Scholar] [CrossRef]
- Greaves, H.E.; Vierling, L.A.; Eitel, J.U.H.; Boelman, N.T.; Magney, T.S.; Prager, C.M.; Griffin, K.L. Estimating Aboveground Biomass and Leaf Area of Low-Stature Arctic Shrubs with Terrestrial LiDAR. Remote Sens. Environ. 2015, 164, 26–35. [Google Scholar] [CrossRef]
- Hopkinson, C.; Lovell, J.; Chasmer, L.; Jupp, D.; Kljun, N.; van Gorsel, E. Integrating Terrestrial and Airborne Lidar to Calibrate a 3D Canopy Model of Effective Leaf Area Index. Remote Sens. Environ. 2013, 136, 301–314. [Google Scholar] [CrossRef]
- Hancock, S.; Anderson, K.; Disney, M.; Gaston, K.J. Measurement of Fine-Spatial-Resolution 3D Vegetation Structure with Airborne Waveform Lidar: Calibration and Validation with Voxelised Terrestrial Lidar. Remote Sens. Environ. 2017, 188, 37–50. [Google Scholar] [CrossRef] [Green Version]
- Crespo-Peremarch, P.; Tompalski, P.; Coops, N.C.; Ruiz, L.Á. Characterizing Understory Vegetation in Mediterranean Forests Using Full-Waveform Airborne Laser Scanning Data. Remote Sens. Environ. 2018, 217, 400–413. [Google Scholar] [CrossRef]
- Puletti, N.; Grotti, M.; Ferrara, C.; Scalercio, S. Traditional and TLS-Based Forest Inventories of Beech and Pine Forests Located in Sila National Park: A Dataset. Data Brief 2021, 34, 106617. [Google Scholar] [CrossRef]
- Hauglin, M.; Gobakken, T.; Astrup, R.; Ene, L.; Næsset, E. Estimating Single-Tree Crown Biomass of Norway Spruce by Airborne Laser Scanning: A Comparison of Methods with and without the Use of Terrestrial Laser Scanning to Obtain the Ground Reference Data. Forests 2014, 5, 384–403. [Google Scholar] [CrossRef]
- Paris, C.; Kelbe, D.; van Aardt, J.; Bruzzone, L. A Precise Estimation of the 3D Structure of the Forest Based on the Fusion of Airborne and Terrestrial Lidar Data. In Proceedings of the 2015 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Milan, Italy, 26–31 July 2015; pp. 49–52. [Google Scholar]
- Yang, X.; Strahler, A.H.; Schaaf, C.B.; Jupp, D.L.B.; Yao, T.; Zhao, F.; Wang, Z.; Culvenor, D.S.; Newnham, G.J.; Lovell, J.L.; et al. Three-Dimensional Forest Reconstruction and Structural Parameter Retrievals Using a Terrestrial Full-Waveform Lidar Instrument (Echidna®). Remote Sens. Environ. 2013, 135, 36–51. [Google Scholar] [CrossRef]
- Giannetti, F.; Puletti, N.; Quatrini, V.; Travaglini, D.; Bottalico, F.; Corona, P.; Chirici, G. Integrating Terrestrial and Airborne Laser Scanning for the Assessment of Single-Tree Attributes in Mediterranean Forest Stands. Eur. J. Remote Sens. 2018, 51, 795–807. [Google Scholar] [CrossRef] [Green Version]
- Puletti, N. [Dataset] Parco Sila—Piedilista di Cavallettamento. 2019. Available online: https://zenodo.org/record/3575529 (accessed on 2 January 2023).
- de Conto, T.; Olofsson, K.; Grgens, E.B.; Rodriguez, L.C.E.; Almeida, G. Performance of Stem Denoising and Stem Modelling Algorithms on Single Tree Point Clouds from Terrestrial Laser Scanning. Comput. Electron. Agric. 2017, 143, 165–176. [Google Scholar] [CrossRef]
- Puletti, N. [Dataset] Sila National Park—3D Point Cloud Data. 2020. Available online: https://zenodo.org/record/3633629 (accessed on 2 January 2023).
- R Core Team. R: A Language and Environment for Statistical Computing; The R Foundation: Vienna, Austria, 2021. [Google Scholar]
- Roussel, J.-R.; Auty, D.; Coops, N.C.; Tompalski, P.; Goodbody, T.R.H.; Meador, A.S.; Bourdon, J.-F.; de Boissieu, F.; Achim, A. LidR: An R Package for Analysis of Airborne Laser Scanning (ALS) Data. Remote Sens. Environ. 2020, 251, 112061. [Google Scholar] [CrossRef]
- Blakey, R.V.; Law, B.S.; Kingsford, R.T.; Stoklosa, J. Terrestrial Laser Scanning Reveals Below-Canopy Bat Trait Relationships with Forest Structure. Remote Sens. Environ. 2017, 198, 40–51. [Google Scholar] [CrossRef]
- Cost Noel, D. Ecological Structure of Forest Vegetation. In Forest Resource Inventories: Proceedings of a Workshop; Department of Forest and Wood Sciences, Colorado State University: Fort Collins, CO, USA, 1979; pp. 29–37. [Google Scholar]
- Pearson, H.A.; Sternitzke, H.S. Forest-Range Inventory: A Multiple-Use Survey. J. Range Manag. 1974, 27, 404–407. [Google Scholar] [CrossRef]
- O’Brien, R.; Van Hooser, D.D.; United States Department of Agriculture, Forest Service. Understory Vegetation Inventory: An Efficient Procedure; (Forestry, Paper 47) Research Paper INT-323; U.S. Dept. of Agriculture, Forest Service, Intermountain Forest and Range Experiment Station: Ogden, UT, USA, 1983. [Google Scholar]
- Kükenbrink, D.; Marty, M.; Bösch, R.; Ginzler, C. Benchmarking Laser Scanning and Terrestrial Photogrammetry to Extract Forest Inventory Parameters in a Complex Temperate Forest. Int. J. Appl. Earth Obs. Geoinf. 2022, 113, 102999. [Google Scholar] [CrossRef]
- Puletti, N.; Grotti, M.; Ferrara, C.; Chianucci, F. Influence of Voxel Size and Point Cloud Density on Crown Cover Estimation in Poplar Plantations Using Terrestrial Laser Scanning. Ann. Silvic. Res. 2021, 46, 148–154. [Google Scholar] [CrossRef]
- Newnham, G.; Armston, J.; Muir, J.; Goodwin, N.; Culvenor, D.; Pueschel, P.; Nystrom, M.; Johansen, K. Evaluation of Terrestrial Laser Scanners for Measuring Vegetation Structure; CSIRO: Canberra, Australia, 2012. [Google Scholar] [CrossRef]
- Corona, P.; Ascoli, D.; Barbati, A.; Bovio, G.; Colangelo, G.; Elia, M.; Garfì, V.; Iovino, F.; Lafortezza, R.; Leone, V.; et al. Integrated Forest Management to Prevent Wildfires under Mediterranean Environments. Ann. Silvic. Res. 2015, 39, 1–22. [Google Scholar] [CrossRef]
- Chianucci, F.; Tattoni, C.; Ferrara, C.; Ciolli, M.; Brogi, R.; Zanni, M.; Apollonio, M.; Cutini, A. Evaluating Sampling Schemes for Quantifying Seed Production in Beech (Fagus Sylvatica) Forests Using Ground Quadrats. For. Ecol. Manag. 2021, 493, 119294. [Google Scholar] [CrossRef]
- Demol, M.; Verbeeck, H.; Gielen, B.; Armston, J.; Burt, A.; Disney, M.; Duncanson, L.; Hackenberg, J.; Kükenbrink, D.; Lau, A.; et al. Estimating Forest Above-Ground Biomass with Terrestrial Laser Scanning: Current Status and Future Directions. Methods Ecol. Evol. 2022, 13, 1628–1639. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ALS Metrics | Description | |
|---|---|---|
| Height-based (12 metrics) | Mean, relative mean, and standard deviation of heights (HMEAN, RHMEAN, SDH) | The mean and relative mean heights above the ground of all first returns |
| Coefficient of variation of height (HCV) | Coefficient of height variation of all first returns | |
| Skewness and kurtosis of height (HS, HK) | Skewness and kurtosis of the normalized heights of all first returns | |
| Mean and standard deviation of heights within three layers (HM1/3, HM2/3, HM3/3, SD1/3, SD2/3, SD3/3) | Mean and standard deviation of heights lower than 1/3, between 1/3 and 2/3, and higher than 2/3 of the maximum height | |
| Density-based (5 metrics) | Percentage of points over the ground (OGP) | The number of first returns classified as no-ground over the total first returns |
| Points total number (PTN) | Total number of first returns | |
| Percentage of points within three layers (PP1/3, PP2/3, PP3/3) | Percentage of points in three layers: Lower than 1/3, between 1/3 and 2/3, and higher than 2/3 |
| Lower Understory (LU) | ||||
| Adjusted-R² = 0.51; nRMSE = 20% | ||||
| Metric | Estimate | Std. Err. | t value | p-level |
| HM1/3 | 0.025 | 0.028 | 1.86 | 0.077 |
| SD1/3 | 0.029 | 0.013 | 1.17 | 0.253 |
| Upper Understory (UU) | ||||
| Adjusted-R² = 0.77; nRMSE = 13% | ||||
| Metric | Estimate | Std. Err. | t value | p-level |
| HM1/3 | 0.029 | 0.003 | 8.77 | < 0.001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ferrara, C.; Puletti, N.; Guasti, M.; Scotti, R. Mapping Understory Vegetation Density in Mediterranean Forests: Insights from Airborne and Terrestrial Laser Scanning Integration. Sensors 2023, 23, 511. https://doi.org/10.3390/s23010511
Ferrara C, Puletti N, Guasti M, Scotti R. Mapping Understory Vegetation Density in Mediterranean Forests: Insights from Airborne and Terrestrial Laser Scanning Integration. Sensors. 2023; 23(1):511. https://doi.org/10.3390/s23010511
Chicago/Turabian StyleFerrara, Carlotta, Nicola Puletti, Matteo Guasti, and Roberto Scotti. 2023. "Mapping Understory Vegetation Density in Mediterranean Forests: Insights from Airborne and Terrestrial Laser Scanning Integration" Sensors 23, no. 1: 511. https://doi.org/10.3390/s23010511