
Hallway Gait Monitoring System Using an In-Package Integrated Dielectric Lens Paired with a mm-Wave Radar

 ,
,  , ,
, ,
Abstract
:1. Introduction
- A reliable stand-alone hallway gait assessment system, which is of great significance for building an affordable everyday gait monitoring system.
- An innovative method, including the choice of the package-friendly lens and inclusion as part of the package design to be paired with a commercially available radar that could remove/mitigate multipath signals and extract gait parameters in such a cluttered environment in the hallway.
- Implementing a fast and easy-to-implement gait extraction algorithm to extract spatiotemporal gait parameters at each single gait cycle, such as speed, step points, step length, stride length and step count, using only one FMCW radar sensor.
2. Hallway Gait Monitoring System
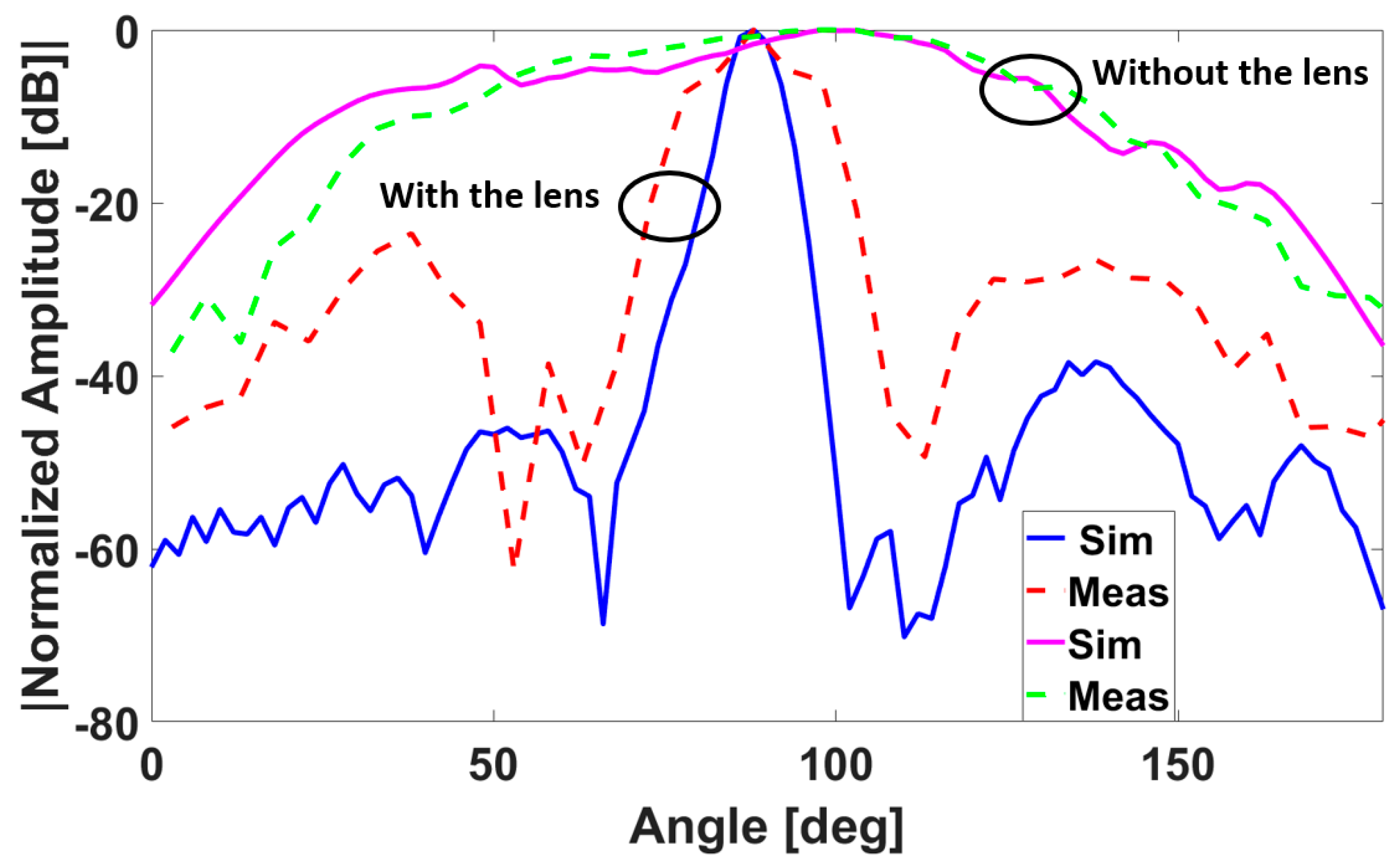
2.1. Lens Design for Hallway Gait Monitoring System
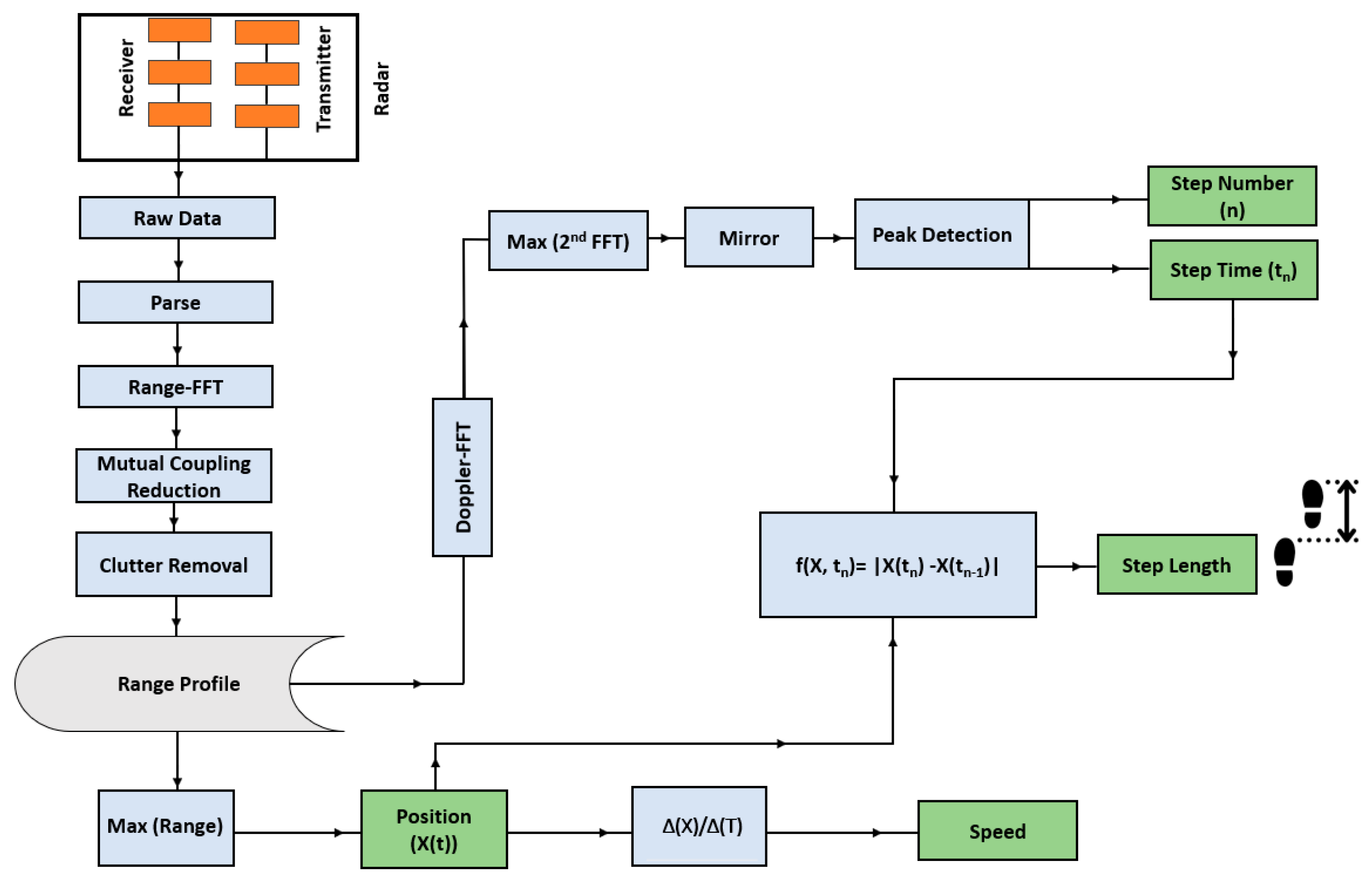
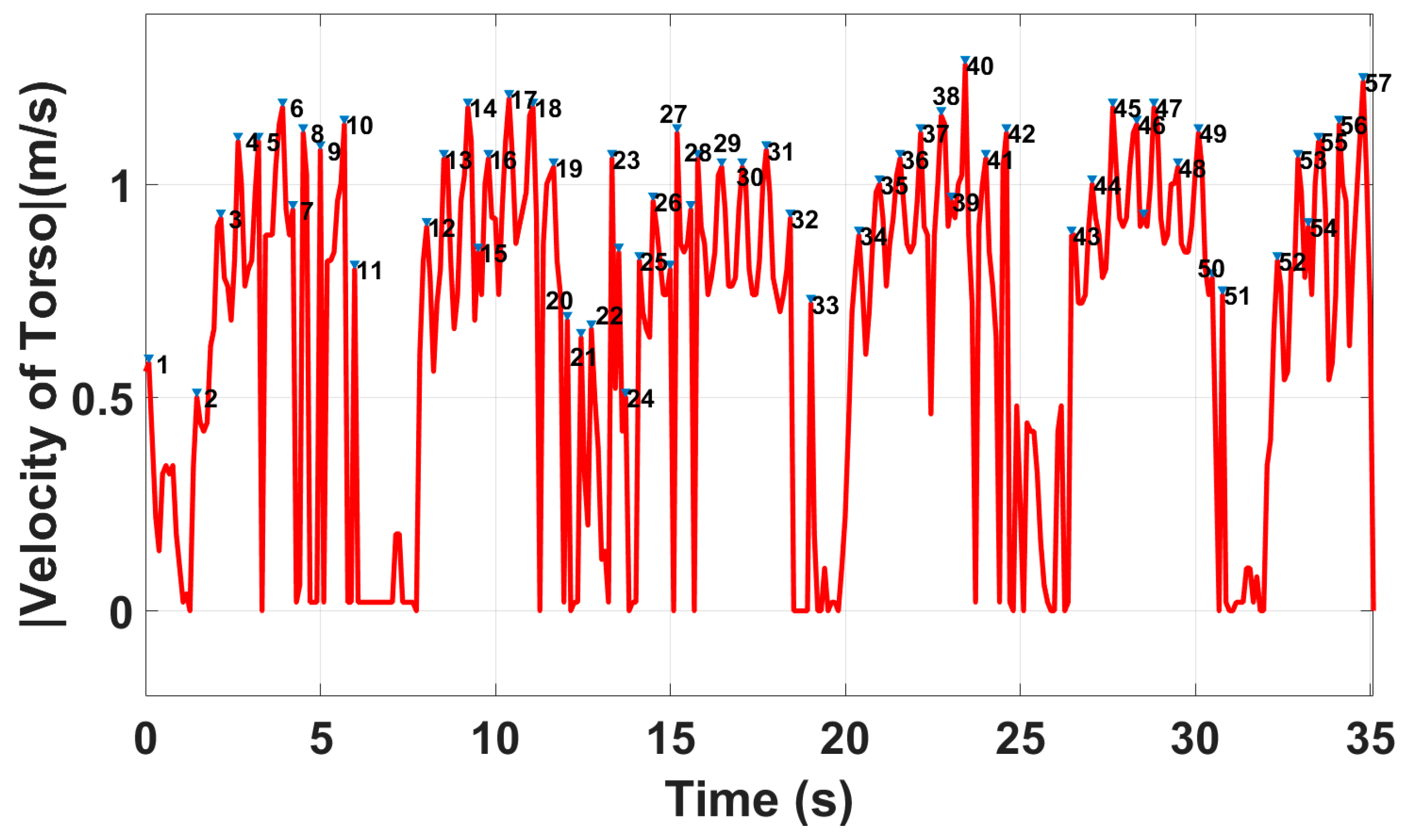
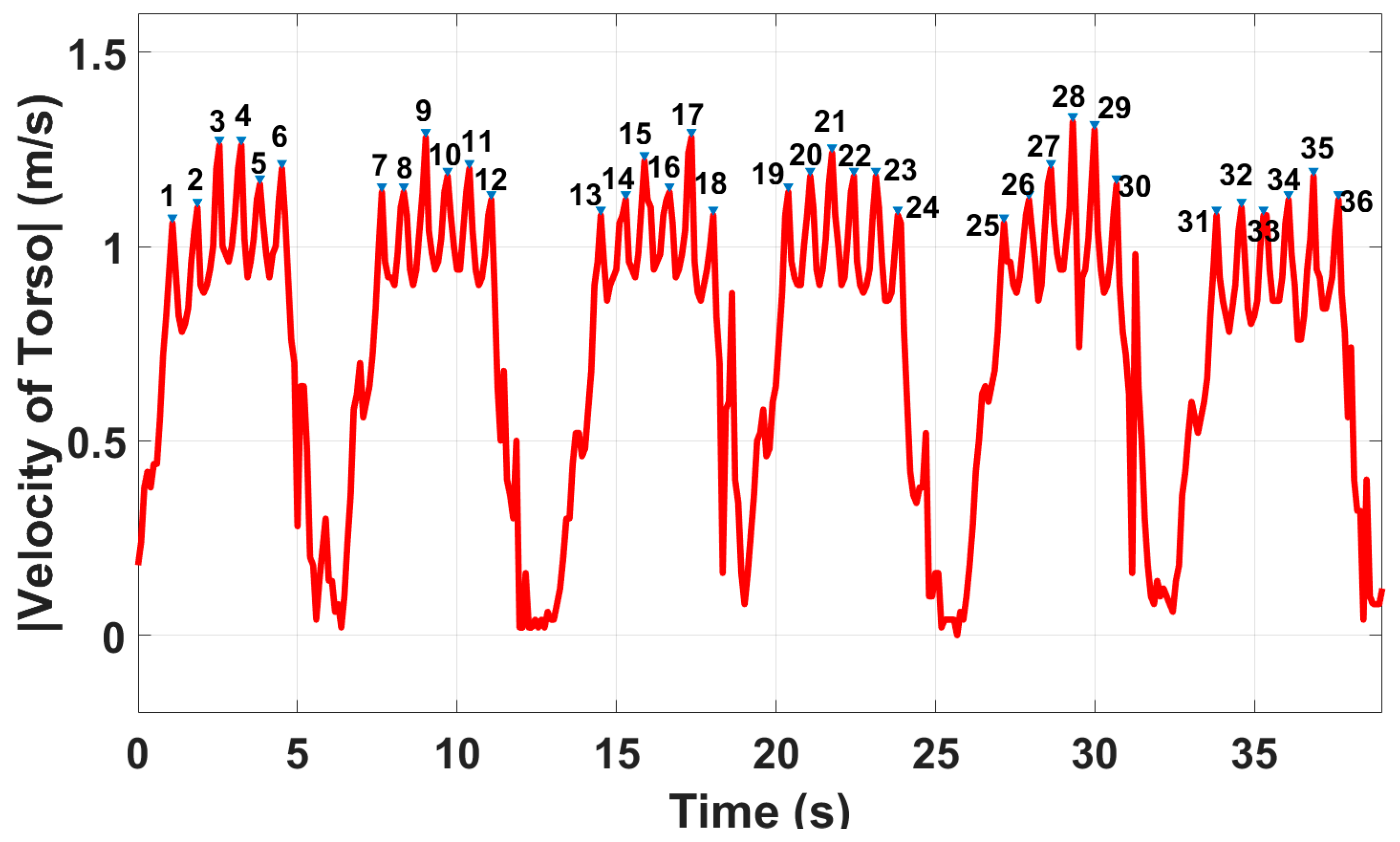
2.2. Gait Extraction Algorithm
3. Experimental Results
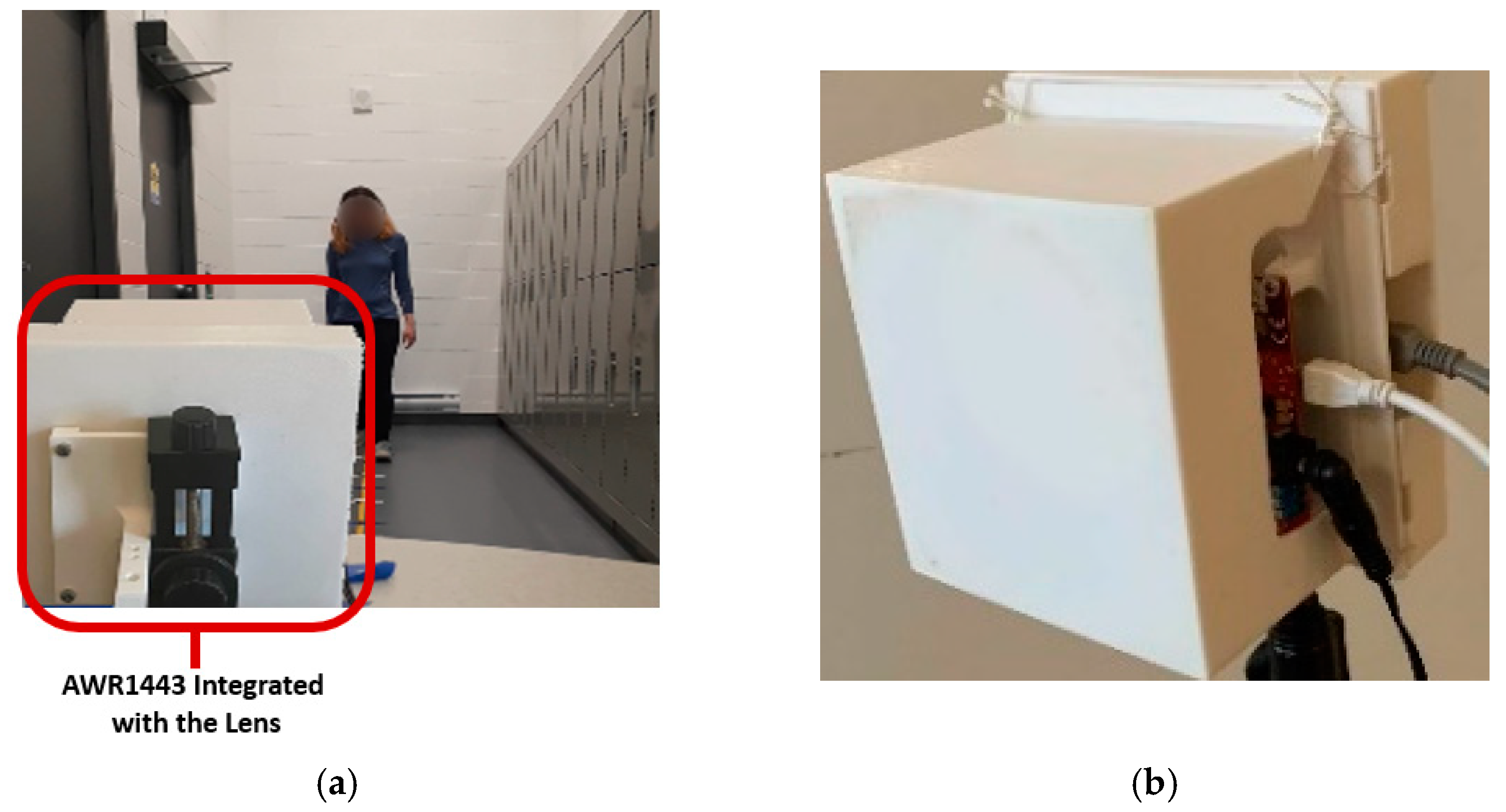
3.1. Experimental Results in a Hallway Environment
3.2. Experimental Results in a Clutter-Free Area
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Wu, C.; Zhang, F.; Hu, Y.; Liu, K.J.R. GaitWay: Monitoring and Recognizing Gait Speed Through the Walls. IEEE Trans. Mob. Comput. 2021, 20, 2186–2199. [Google Scholar] [CrossRef]
- Sabatini, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Assessment of Walking Features from Foot Inertial Sensing. IEEE Trans. Biomed. Eng. 2005, 52, 486–494. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Perry, J.; Burnfield, J.M. Gait Analysis: Normal and Pathological Function. J. Sport. Sci. Med. 2010, 9, 353. [Google Scholar] [CrossRef]
- Webster, K.E.; Wittwer, J.E.; Feller, J.A. Validity of the GAITRite® walkway system for the measurement of averaged and individual step parameters of gait. Gait Posture 2005, 22, 317–321. [Google Scholar] [CrossRef] [PubMed]
- Pfister, A.; West, A.M.; Bronner, S.; Noah, J.A. Comparative abilities of Microsoft Kinect and Vicon 3D motion capture for gait analysis. J. Med. Eng. Technol. 2014, 38, 274–280. [Google Scholar] [CrossRef]
- Watson, B.J.; Salmoni, A.W.; Zecevic, A.A. Falls in an acute care hospital as reported in the adverse event management system. J. Hosp. Adm. 2015, 4, 84. [Google Scholar] [CrossRef] [Green Version]
- Diraco, G.; Leone, A.; Siciliano, P. A Radar-Based Smart Sensor for Unobtrusive Elderly Monitoring in Ambient Assisted Living Applications. Biosensors 2017, 7, 55. [Google Scholar] [CrossRef] [Green Version]
- Postolache, O.; Pereira, J.D.; Viegas, V.; Girao, P.S. Gait Rehabilitation Assessment Based on Microwave Doppler Radars Embedded in Walkers. In Proceedings of the 2015 IEEE International Symposium on Medical Measurements and Applications, MeMeA 2015—Proceedings, Torino, Italy, 7–9 May 2015; pp. 208–213. [Google Scholar] [CrossRef]
- Alshamaa, D.; Chkeir, A.; Soubra, R.; Mourad-Chehade, F. Measurement of Gait Speed using a Doppler Radar: Influence of Acceleration and Deceleration Zones. In Proceedings of the SAS 2019—2019 IEEE Sensors Applications Symposium, Sophia Antipolis, France, 11–13 March 2019. [Google Scholar] [CrossRef]
- Tahmoush, D.; Silvious, J. Radar Micro-Doppler for Long range Front-View Gait Recognition. In Proceedings of the IEEE 3rd International Conference on Biometrics: Theory, Applications and Systems (BTAS 2009), Washington, DC, USA, 28–30 September 2009. [Google Scholar] [CrossRef]
- Abedi, H.; Boger, J.; Morita, P.P.; Wong, A.; Shaker, G. Hallway Gait Monitoring Using Novel Radar Signal Processing and Unsupervised Learning. IEEE Sens. J. 2022, 22, 15133–15145. [Google Scholar] [CrossRef]
- Tahmoush, D.; Silvious, J. Gait Variations in Human Micro-Doppler. Int. J. Electron. Telecommun. 2011, 57, 23–28. [Google Scholar] [CrossRef]
- Yardibi, T.; Cuddihy, P.; Genc, S.; Bufi, C.; Skubic, M.; Rantz, M.; Liu, L.; Phillips, C. Gait Characterization via Pulse-Doppler Radar. In Proceedings of the 2011 IEEE International Conference on Pervasive Computing and Communications Workshops (PERCOM Workshops 2011), Seattle, WA, USA, 21–25 March 2011; pp. 662–667. [Google Scholar] [CrossRef]
- Seifert, A.K.; Amin, M.G.; Zoubir, A.M. Detection of Gait Asymmetry using Indoor Doppler Radar. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019. [Google Scholar]
- Fei, L.; Binke, H.; Hang, Z.; Hao, D. Human Gait Recognition using Micro-Doppler Features. In Proceedings of the 2012 5th Global Symposium on Millimeter-Waves (GSMM 2012), Harbin, China, 27–30 May 2012; pp. 326–329. [Google Scholar] [CrossRef]
- Palmer, J.W.; Bing, K.F.; Sharma, A.C.; Perkins, J.B. Exploitation of Radar Doppler Signatures for Gait Analysis. In Proceedings of the 2012 Conference Record of the Forty Sixth Asilomar Conference on Signals, Systems and Computers (ASILOMAR), Pacific Grove, CA, USA, 4–7 November 2012; Volume 30332, pp. 629–632. [Google Scholar] [CrossRef]
- Karabacak, C.; Gurbuz, S.Z.; Gurbuz, A.C.; Guldogan, M.B.; Hendeby, G.; Gustafsson, F. Knowledge Exploitation for Human Micro-Doppler Classification. IEEE Geosci. Remote Sens. Lett. 2015, 12, 2125–2129. [Google Scholar] [CrossRef] [Green Version]
- Boutte, D.; Radzicki, V.R.; Gumley, M.; Hunt, S.; Taylor, P.; Hunt, A. A Multistatic Doppler Radar System with Application to Aeroecology. In Proceedings of the 2017 IEEE Radar Conference (RadarConf 2017), Seattle, WA, USA, 8–12 May 2017; pp. 47–51. [Google Scholar] [CrossRef]
- Seifert, A.-K.; Grimmer, M.; Zoubir, A.M. Doppler Radar for the Extraction of Biomechanical Parameters in Gait Analysis. IEEE J. Biomed. Health Inform. 2021, 25, 547–558. [Google Scholar] [CrossRef]
- Abedi, H.; Ansariyan, A.; Morita, P.P.; Boger, J.; Wong, A.; Shaker, G. Sequential Deep Learning for In-Home Activity Monitoring Using mm-Wave FMCW Radar. In Proceedings of the 2021 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, APS/URSI 2021—Proceedings, Singapore, 4–10 December 2021; pp. 1499–1500. [Google Scholar] [CrossRef]
- Abedi, H.; Ansariyan, A.; Morita, P.P.; Wong, A.; Boger, J.; Shaker, G. AI-Powered Non-Contact In-Home Gait Monitoring and Activity Recognition System Based on mm-Wave FMCW Radar and Cloud Computing. arXiv 2022, arXiv:2208.05905. [Google Scholar]
- Abedi, H.; Morita, P.P.; Boger, J.; Wong, A.; Shaker, G. In-Package Integrated Dielectric Lens Paired with a MIMO mm-Wave Radar for Corridor Gait Monitoring. In Proceedings of the 2021 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, APS/URSI 2021—Proceedings, Singapore, 4–10 December 2021; pp. 1795–1796. [Google Scholar] [CrossRef]
- Abedi, H.; Shaker, G. Low-Cost 3D printed Dielectric Hyperbolic Lens Antenna for Beam Focusing and Steering of a 79 GHz MIMO Radar. In Proceedings of the 2020 IEEE International Symposium on Antennas and Propagation and North American Radio Science Meeting, IEEECONF 2020—Proceedings, Quebec, QC, Canada, 5–10 July 2020; pp. 1543–1544. [Google Scholar] [CrossRef]
- Abedi, H.; Magnier, C.; Boger, J.; Wong, A. Integration of Random Forests and MM-Wave FMCW Radar Technology for Gait Recognition. J. Comput. Vis. Imaging Syst. 2019, 5, 2. [Google Scholar] [CrossRef]
- Abedi, H.; Ansariyan, A.; Lehman, C.; Morita, P.P.; Boger, J.; Wong, A.; Shaker, G. Non-Visual and Contactless Wellness Monitoring for Long Term Care Facilities Using mm-Wave Radar Sensors. In Proceedings of the 2022 IEEE Sensors, Dallas, TX, USA, 30 October–2 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Abedi, H.; Shaker, G.; Boger, J.; Morita, P.; Wong, A. Use of Millimeter Wave FMCW Radar to Capture Gait Parameters. Am. J. Biomed. Sci. Res. 2019, 6, 2019–2025. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, C.A.; Lima, E.B.; Costa, J.R. Dielectric Lens Antennas; Springer Science+Business Media: Berlin, Germany, 2015. [Google Scholar] [CrossRef] [Green Version]
- Abedi, H.; Luo, S.; Mazumdar, V.; Riad, M.M.Y.R.; Shaker, G. AI-Powered In-Vehicle Passenger Monitoring Using Low-Cost mm-Wave Radar. IEEE Access 2021, 10, 18998–19012. [Google Scholar] [CrossRef]
- Omer, A.E.; Gigoyan, S.; Shaker, G.; Safavi-Naeini, S. WGM-Based Sensing of Characterized Glucose- Aqueous Solutions at mm-Waves. IEEE Access 2020, 8, 38809–38825. [Google Scholar] [CrossRef]
- Ansys HFSS | 3D High-Frequency Simulation Software. Available online: https://www.ansys.com/products/electronics/ansys-hfss (accessed on 20 February 2019).
- Murari, A.; Singh, K.N. Lund and Browder chart—Modified versus original: A comparative study. Acute Crit. Care 2019, 34, 276–281. [Google Scholar] [CrossRef] [Green Version]
- Bogin, B.; Varela-Silva, M.I. Leg Length, Body Proportion, and Health: A Review with a Note on Beauty. Int. J. Environ. Res. Public Health 2010, 7, 1047–1075. [Google Scholar] [CrossRef] [Green Version]
- Seifert, A.-K.; Zoubir, A.M.; Amin, M.G. Radar-Based Human Gait Recognition in Cane-Assisted Walks. In Proceedings of the 2017 IEEE Radar Conference (RadarConf 2017), Seattle, WA, USA, 8–12 May 2017; pp. 1428–1433. [Google Scholar] [CrossRef]
- Chen, V.; Li, F.; Ho, S.-S.; Wechsler, H. Micro-doppler effect in radar: Phenomenon, model, and simulation study. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 2–21. [Google Scholar] [CrossRef]
- Morita, P.P.; Rocha, A.S.; Shaker, G.; Lee, D.; Wei, J.; Fong, B.; Thatte, A.; Karimi, A.; Xu, L.; Ma, A.; et al. Comparative Analysis of Gait Speed Estimation Using Wideband and Narrowband Radars, Thermal Camera, and Motion Tracking Suit Technologies. J. Healthc. Inform. Res. 2020, 4, 215–237. [Google Scholar] [CrossRef]
- Perera, S.; Mody, S.H.; Woodman, R.C.; Studenski, S.A. Meaningful Change and Respon-siveness in Common Physical Performance Measures in Older Adults. J. Am. Geriatr. Soc. 2006, 54, 743–749. [Google Scholar] [CrossRef] [PubMed]
- Saho, K.; Fujimoto, M.; Masugi, M.; Chou, L.-S. Gait Classification of Young Adults, Elderly Non-Fallers, and Elderly Fallers Using Micro-Doppler Radar Signals: Simulation Study. IEEE Sens. J. 2017, 17, 2320–2321. [Google Scholar] [CrossRef]
- KSaho, K.; Uemura, K.; Sugano, K.; Matsumoto, M. Using Micro-Doppler Radar to Measure Gait Features Associated with Cognitive Functions in Elderly Adults. IEEE Access 2019, 7, 24122–24131. [Google Scholar] [CrossRef]
- Wang, F.; Skubic, M.; Rantz, M.; Cuddihy, P.E. Quantitative Gait Measurement with Pulse-Doppler Radar for Passive In-Home Gait Assessment. IEEE Trans. Biomed. Eng. 2014, 61, 2434–2443. [Google Scholar] [CrossRef] [Green Version]
- Morita, P.P.; Rocha, A.S.; Shaker, G.; Lee, D.; Wei, J.; Fong, B.; Thatte, A.; Karimi, A.-H.; Xu, L.L.; Ma, A.; et al. Comparison of Gait Speed Estimation of Multiple Sensor-Based Technologie. In Proceedings of the International Symposium on Human Factors and Ergonomics in Health Care, Chicago, IL, USA, 24–27 March 2019; Volume 8, pp. 135–139. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristic | Characteristic Description | Specification |
|---|---|---|
| Start Frequency | The frequency of the radar signal will start at | 77 GHz |
| Frequency Slope | The slope at which the frequency of the radar is increasing. | 60 MHz/μs |
| Idle Time | The time between the previous chirp finishing and the frequency ramp starting | 250 μs |
| Transmit Start Time | The time within the chirp where the transmitter is turned on | 98 Μs |
| ADC Start Time | The time when the ADC starts sampling | 10 μs |
| ADC Samples | The number of samples the ADC takes | 64 |
| ADC Sample Rate | The rate at which the ADC takes samples | 2200 Ksps |
| Ramp End Time | The time when the frequency ramps finished | 60 μs |
| Chirps/frame | The number of chirps per frame | 256 |
| Bandwidth | The difference between the maximum and the minimum frequency | 3600 MHz |
| Speed (m/s) | Step Count | Step Length (cm) | |
|---|---|---|---|
| Reference Value | 0.87 | 36 | 70.0 |
| Radar W/O the lens | 2.10 | 57 | 90.3 |
| Radar W/the lens | 0.83 | 36 | 68.6 |
| Average error for four participants (W/the lens) | 0.013 | +1.25 | −2.33 |
| Reference | Reported Error for Speed | Number of Radars | Type of Environment | Extracted Parameters | Radar Type and Other Required Devices |
|---|---|---|---|---|---|
| [37] | Not reported | 1 | Low clutter | mean walking speed, maximum leg velocity, maximum leg velocity, mean leg velocity in swing and stance phase, degree of variation of leg velocity in swing and stance phase, | Micro-Doppler |
| [38] | For 1.1. m/s walk (foot velocity error): 0.06 m/s to 0.17 m/s | 2 | Low clutter | Stride time, stance time, flight time, step time, cadence, stride length, step length, maximal foot velocity, maximal ankle velocity, maximal knee velocity, time instant of maximal knee velocity: | Continuous waves and treadmill |
| [39] | 0.144 m/s | 2 | Low clutter | Foot velocity, torso velocity, step time | pulse-Doppler |
| [40] | For 10 GHz: slow walk: 0.4 m/s and normal walk: 0.14 m/s For 24 GHz: 0.5 m/s and normal walk: 0.06 m/s | 1 | Low clutter | Walking speed | 10 GHz pulse-Doppler 24 GHz FMCW |
| [11] | 0.0040 m/s to 0.043 m/s | 1 | High clutter | At each gait cycle: walking speed, maximum velocity of the torso, step length, number of steps, step points, step time, step count | FMCW radar |
| This work | 0.0038 m/s to 0.045 m/s | 1 | High clutter | At each gait cycle: walking speed, maximum velocity of the torso, step length, number of steps, step points, step time, step count | FMCW radar paired with a hyperbolic lens |
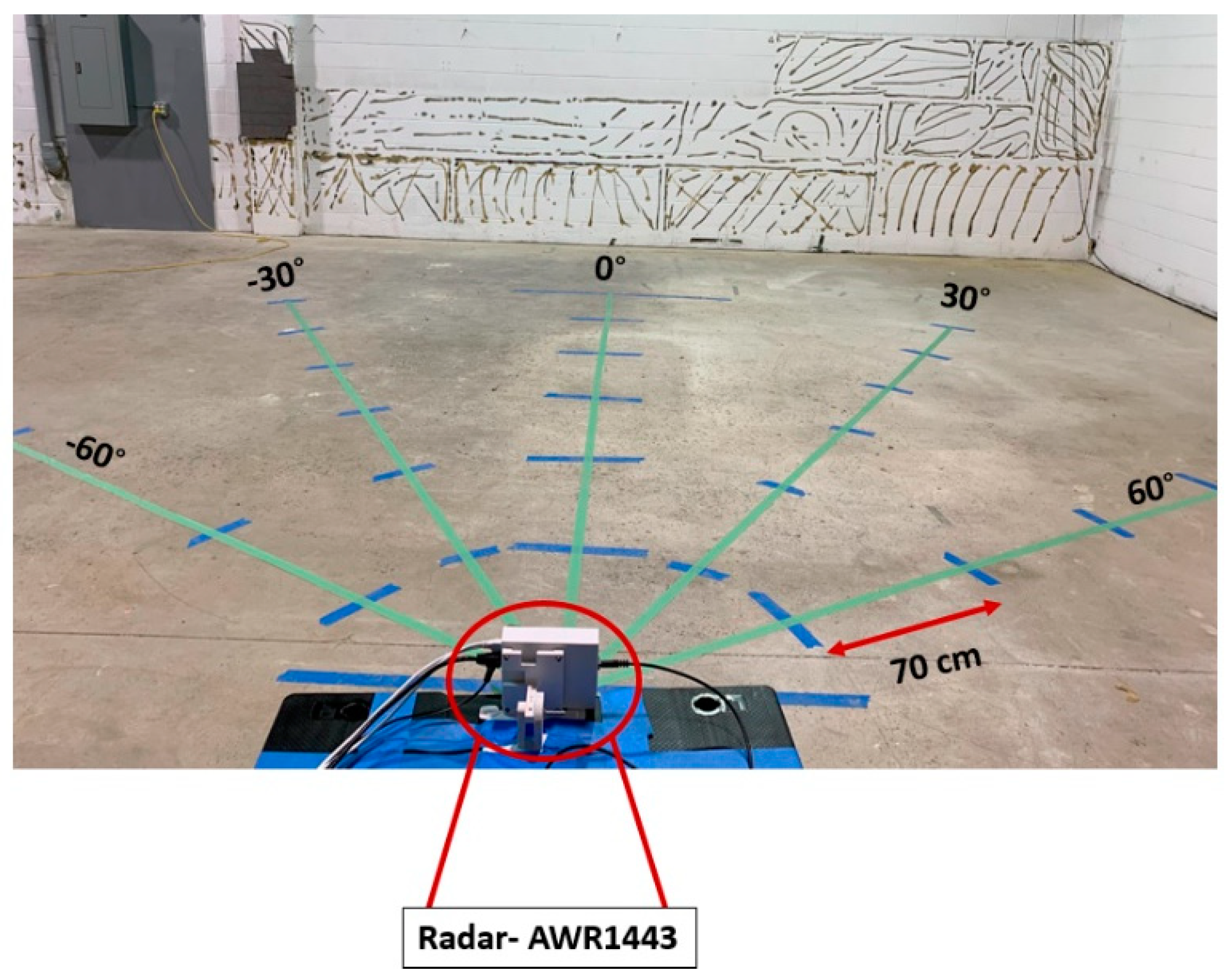
| Direction of Walking | Step Count | Step Length (cm) | Speed (m/s) Radar | Speed (m/s) Stopwatch |
|---|---|---|---|---|
| −60° | 35 | 65.80 | 0.96 | 0.91 |
| −30° | 36 | 68.01 | 0.86 | 0.90 |
| 0° | 36 | 69.10 | 0.95 | 0.96 |
| 30° | 36 | 68.57 | 0.94 | 0.98 |
| 60° | 33 | 65.06 | 0.95 | 0.96 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abedi, H.; Boger, J.; Morita, P.P.; Wong, A.; Shaker, G. Hallway Gait Monitoring System Using an In-Package Integrated Dielectric Lens Paired with a mm-Wave Radar. Sensors 2023, 23, 71. https://doi.org/10.3390/s23010071
Abedi H, Boger J, Morita PP, Wong A, Shaker G. Hallway Gait Monitoring System Using an In-Package Integrated Dielectric Lens Paired with a mm-Wave Radar. Sensors. 2023; 23(1):71. https://doi.org/10.3390/s23010071
Chicago/Turabian StyleAbedi, Hajar, Jennifer Boger, Plinio Pelegrini Morita, Alexander Wong, and George Shaker. 2023. "Hallway Gait Monitoring System Using an In-Package Integrated Dielectric Lens Paired with a mm-Wave Radar" Sensors 23, no. 1: 71. https://doi.org/10.3390/s23010071