
Random Time Division Multiplexing Based MIMO Radar Processing with Tensor Completion Approach
Abstract
:1. Introduction
2. Signal Model
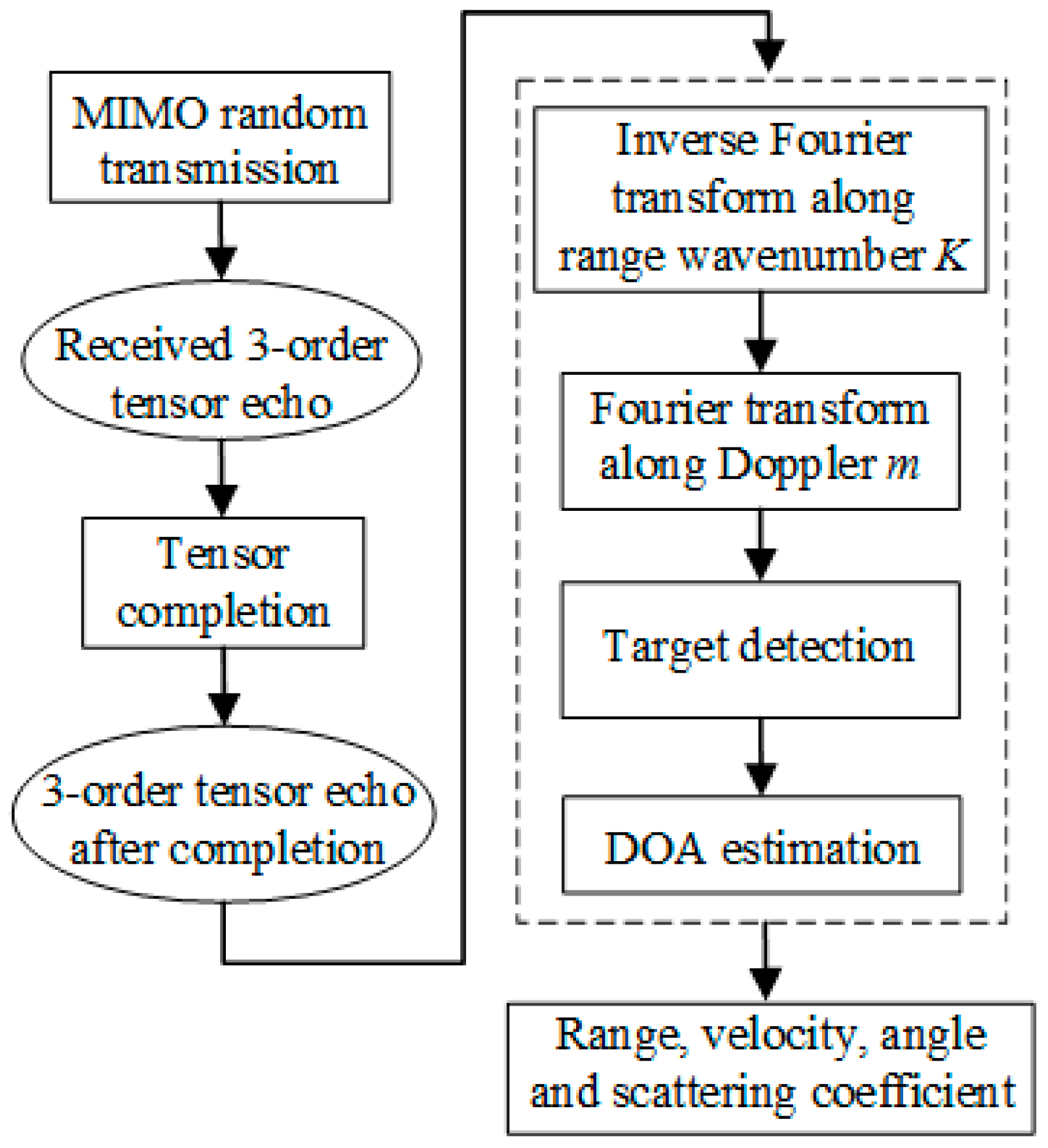
3. Random TDM MIMO Signal Processing with Tensor Completion
4. Performance Simulation and Analysis
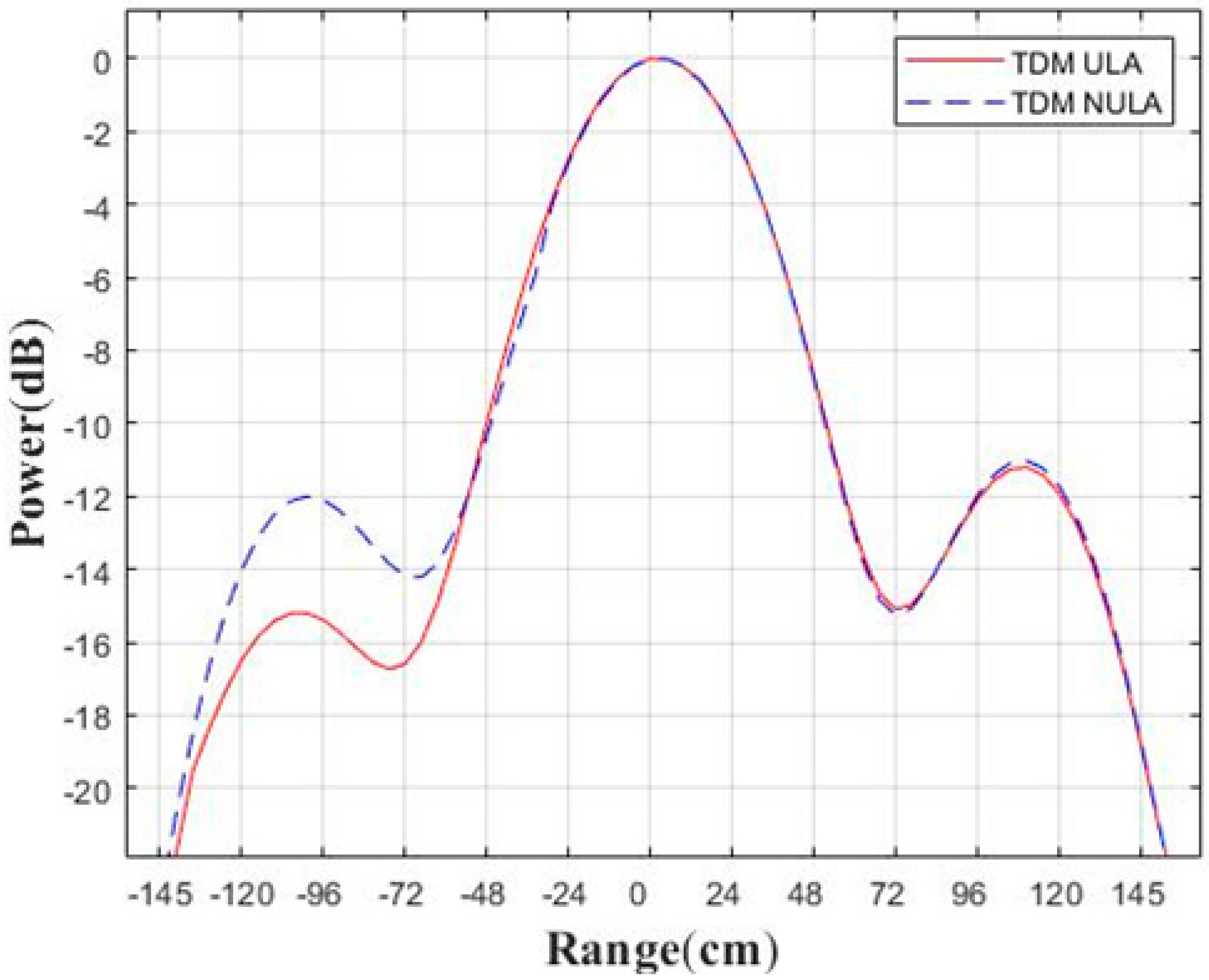
4.1. Random TDM MIMO Radar Simulation
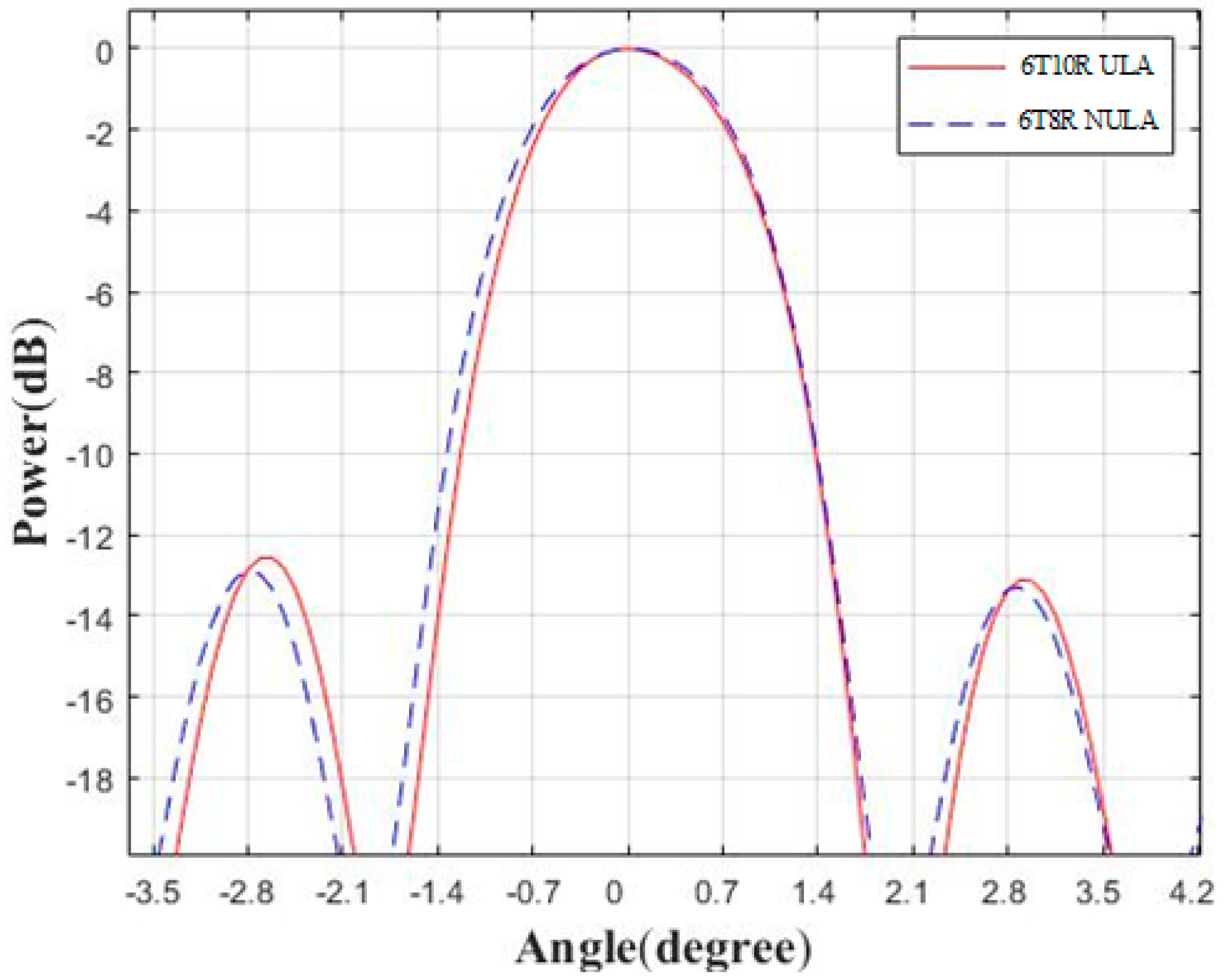
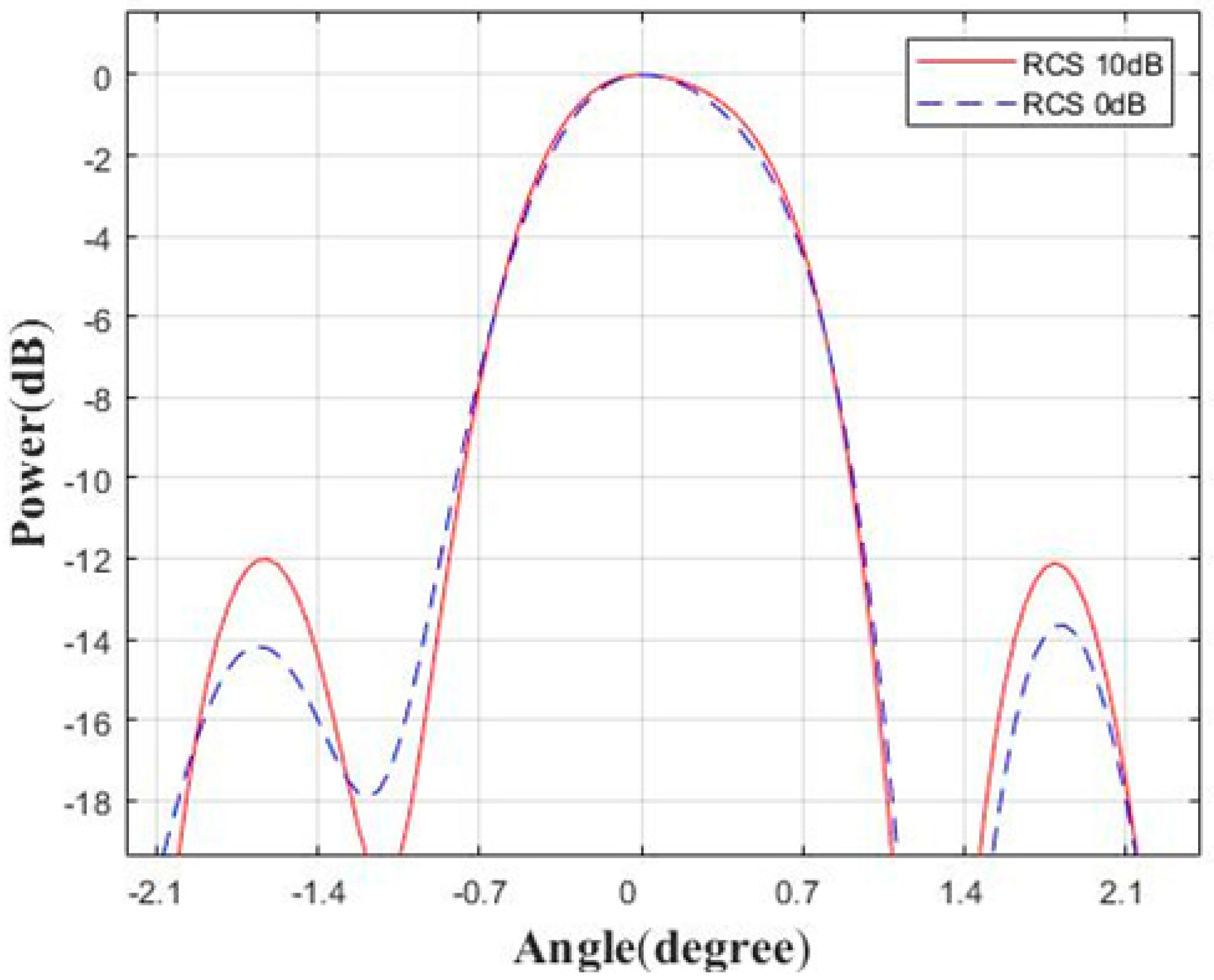
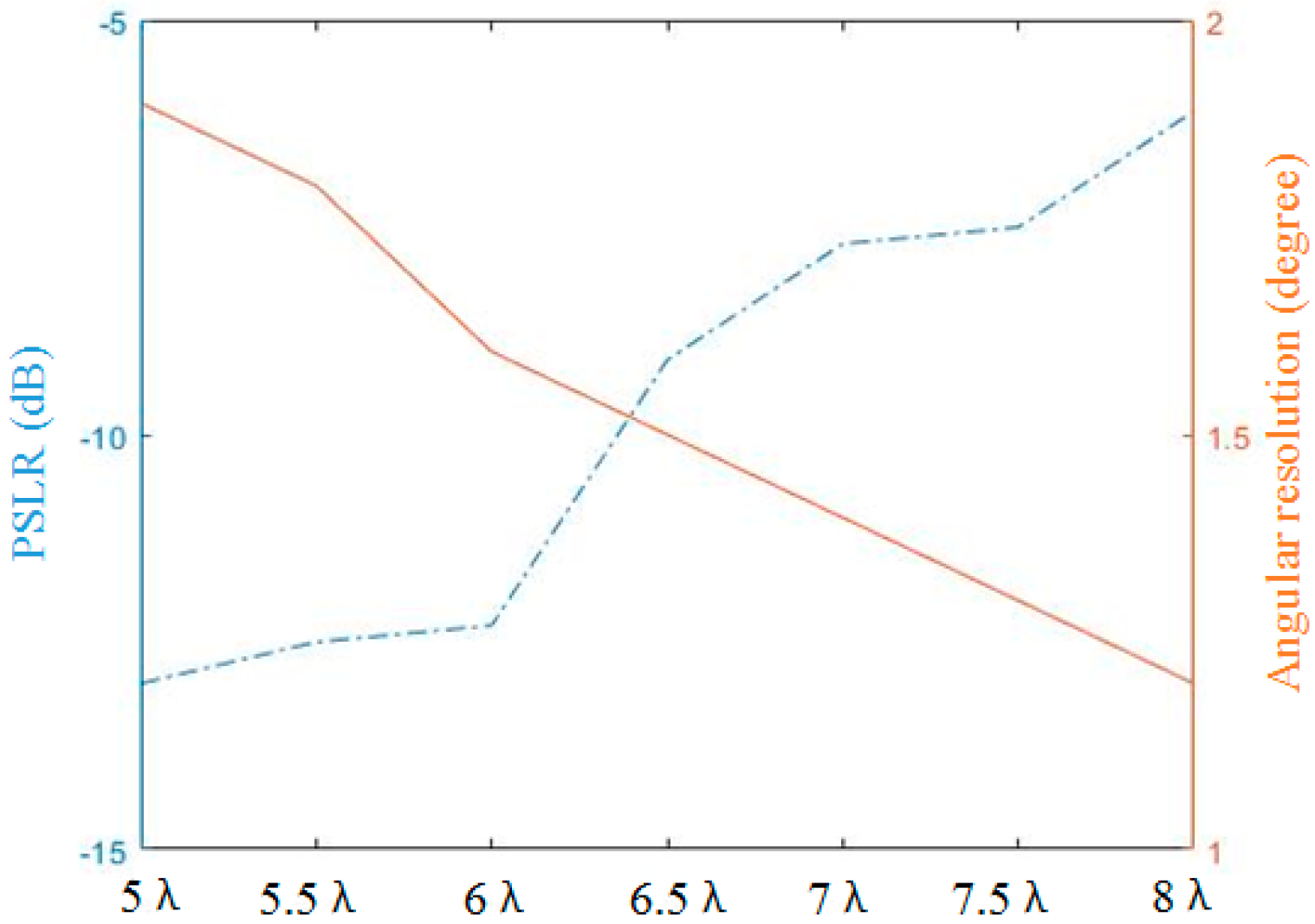
4.2. Performance Analysis of Angular Resolution Improvement
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Miralles, E.; Multerer, T.; Ganis, A.; Schoenlinner, B.; Prechtel, U.; Meusling, A.; Mietzner, J.; Weckerle, C.; Esteban, H.; Vossiek, M.; et al. Multifunctional and compact 3D FMCW MIMO radar system with rectangular array for medium-range applications. IEEE Aerosp. Electron. Syst. Mag. 2018, 33, 46–54. [Google Scholar] [CrossRef]
- Engels, F.; Heidenreich, P.; Wintermantel, M.; Stacker, L.; Al Kadi, M.; Zoubir, A.M. Automotive Radar Signal Processing: Research Directions and Practical Challenges. IEEE J. Sel. Top. Signal Process. 2021, 15, 865–878. [Google Scholar] [CrossRef]
- Baral, A.B.; Torlak, M. Joint Doppler Frequency and Direction of Arrival Estimation for TDM MIMO Automotive Radars. IEEE J. Sel. Top. Signal Process. 2021, 15, 980–995. [Google Scholar] [CrossRef]
- Belfiori, F.; van Rossum, W.; Hoogeboom, P. Random transmission scheme approach for a FMCW TDMA coherent MIMO radar. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 178–183. [Google Scholar] [CrossRef]
- Hu, X.; Li, Y.; Lu, M.; Wang, Y.; Yang, X. A Multi-Carrier-Frequency Random-Transmission Chirp Sequence for TDM MIMO Automotive Radar. IEEE Trans. Veh. Technol. 2019, 68, 3672–3685. [Google Scholar] [CrossRef]
- Longman, O.; Bilik, I. Spectral Radon–Fourier Transform for Automotive Radar Applications. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 1046–1056. [Google Scholar] [CrossRef]
- Ma, J.; Zhang, J.; Yang, Z.; Qiu, T. Off-Grid DOA Estimation Using Sparse Bayesian Learning for MIMO Radar under Impulsive Noise. Sensors 2022, 22, 6268. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Petropulu, A.P.; Poor, H.V. MIMO Radar for Advanced Driver-Assistance Systems and Autonomous Driving: Advantages and Challenges. IEEE Signal Process. Mag. 2020, 37, 98–117. [Google Scholar] [CrossRef]
- Schindler, D.; Schweizer, B.; Knill, C.; Hasch, J.; Waldschmidt, C. An Integrated Stepped-Carrier OFDM MIMO Radar Utilizing a Novel Fast Frequency Step Generator for Automotive Applications. IEEE Trans. Microw. Theory Tech. 2019, 67, 4559–4569. [Google Scholar] [CrossRef]
- Lin, Y.-C.; Lee, T.-S.; Pan, Y.-H.; Lin, K.-H. Low-Complexity High-Resolution Parameter Estimation for Automotive MIMO Radars. IEEE Access 2020, 8, 16127–16138. [Google Scholar] [CrossRef]
- Overdevest, J.; Jansen, F.; Uysal, F.; Yarovoy, A. Doppler Influence on Waveform Orthogonality in 79 GHz MIMO Phase-Coded Automotive Radar. IEEE Trans. Veh. Technol. 2020, 69, 16–25. [Google Scholar] [CrossRef]
- Liu, T.; Sun, J.; Li, Q.; Hao, Z.; Wang, G. Low Correlation Interference OFDM-NLFM Waveform Design for MIMO Radar Based on Alternating Optimization. Sensors 2021, 21, 7704. [Google Scholar] [CrossRef] [PubMed]
- Bialer, O.; Jonas, A.; Tirer, T. Code Optimization for Fast Chirp FMCW Automotive MIMO Radar. IEEE Trans. Veh. Technol. 2021, 70, 7582–7593. [Google Scholar] [CrossRef]
- Bose, A.; Tang, B.; Soltanalian, M.; Li, J. Mutual Interference Mitigation for Multiple Connected Automotive Radar Systems. IEEE Trans. Veh. Technol. 2021, 70, 11062–11066. [Google Scholar] [CrossRef]
- Zhou, S.; Liu, H.; Wang, X.; Cao, Y. MIMO radar range-angular-doppler sidelobe suppression using random space-time coding. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2047–2060. [Google Scholar] [CrossRef]
- Harter, M.; Hildebrandt, J.; Ziroff, A.; Zwick, T. Self-Calibration of a 3-D-Digital Beamforming Radar System for Automotive Applications With Installation Behind Automotive Covers. IEEE Trans. Microw. Theory Tech. 2016, 64, 2994–3000. [Google Scholar] [CrossRef]
- Schmid, C.M.; Feger, R.; Wagner, C.; Stelzer, A. Design of a linear non-uniform antenna array for a 77-GHz MIMO FMCW radar. In Proceedings of the 2009 IEEE MTT-S International Microwave Workshop on Wireless Sensing, Local Positioning, and RFID, Cavtat, Croatia, 24–25 September 2009; pp. 1–4. [Google Scholar] [CrossRef]
- Rossi, M.; Haimovich, A.M.; Eldar, Y.C. Spatial Compressive Sensing for MIMO Radar. IEEE Trans. Signal Process. 2014, 62, 419–430. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, Y.D. 4D Automotive Radar Sensing for Autonomous Vehicles: A Sparsity-Oriented Approach. IEEE J. Sel. Top. Signal Process. 2021, 15, 879–891. [Google Scholar] [CrossRef]
- Ying, J.; Lu, H.; Wei, Q.; Cai, J.-F.; Guo, D.; Wu, J.; Chen, Z.; Qu, X. Hankel Matrix Nuclear Norm Regularized Tensor Completion for $N$-dimensional Exponential Signals. IEEE Trans. Signal Process. 2017, 65, 3702–3717. [Google Scholar] [CrossRef]
- Santra, A.; Ganis, A.R.; Mietzner, J.; Ziegler, V. Towards Adaptive MIMO Radar—Receiver Processing for Orthogonally Coded FMCW Waveforms. In Proceedings of the 2019 International Radar Conference (RADAR), Toulon, France, 23–27 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, T.; Liao, G.; Li, Y.; Gu, T.; Zhang, T.; Chen, C. A Time-domain strip-map processing scheme for FMCW imaging. In Proceedings of the 2021 CIE International Conference on Radar (Radar), Haikou, China, 15–19 December 2021; pp. 228–231. [Google Scholar] [CrossRef]
- Wang, R.; Loffeld, O.; Nies, H.; Knedlik, S.; Hagelen, M.; Essen, H. Focus FMCW SAR Data Using the Wavenumber Domain Algorithm. IEEE Trans. Geosci. Remote Sens. 2010, 48, 2109–2118. [Google Scholar] [CrossRef]
- Kolda, T.; Bader, B.W. Tensor Decompositions and Applications. SIAM Rev. 2009, 51, 455–500. [Google Scholar] [CrossRef]
- Kolda, T.G. Multilinear Operators for Higher-Order Decompositions; Report No. SAND2006-2081; Sandia National Laboratories: Livermore, CA, USA, 2006. [CrossRef]
- Schipper, T.; Fortuny-Guasch, J.; Tarchi, D.; Reichardt, L.; Zwick, T. RCS measurement results for automotive related objects at 23–27 GHz. In Proceedings of the 5th European Conference on Antennas and Propagation (EUCAP), Rome, Italy, 11–15 April 2011; pp. 683–686. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Carrier frequency | f0 = 77 GHz |
| Pulse width | Tp = 50 us |
| Transmitted bandwidth | 300 MHz |
| Sampling frequency | 10 MHz |
| Number of transmitting antennas | 6 |
| Number of receiving antennas | 8 |
| Angular Resolution | PSLR | |||
|---|---|---|---|---|
| Transmitting Antenna Interval | TDM–NULA | TDM–ULA | TDM–NULA | TDM–ULA |
| 5λ | 1.9° | 1.9° | −13.0 dB | −13.0 dB |
| 5.5λ | 1.8° | 1.7° | −12.5 dB | −14.0 dB |
| 6λ | 1.6° | 1.6° | −12.3 dB | −14.0 dB |
| 6.5λ | 1.5° | 1.4° | −9.1 dB | −14.0 dB |
| 7λ | 1.4° | 1.3° | −7.7 dB | −14.0 dB |
| 7.5λ | 1.3° | 1.2° | −7.5 dB | −14.0 dB |
| 8λ | 1.2° | 1.1° | −6.1 dB | −14.0 dB |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Qiao, Y.; Li, G.; Li, W.; Tian, Q. Random Time Division Multiplexing Based MIMO Radar Processing with Tensor Completion Approach. Sensors 2023, 23, 4756. https://doi.org/10.3390/s23104756
Zhang Y, Qiao Y, Li G, Li W, Tian Q. Random Time Division Multiplexing Based MIMO Radar Processing with Tensor Completion Approach. Sensors. 2023; 23(10):4756. https://doi.org/10.3390/s23104756
Chicago/Turabian StyleZhang, Yuan, Yixue Qiao, Gang Li, Wei Li, and Qing Tian. 2023. "Random Time Division Multiplexing Based MIMO Radar Processing with Tensor Completion Approach" Sensors 23, no. 10: 4756. https://doi.org/10.3390/s23104756