1. Introduction
We are surrounded by sensors that allow us to collect data in specific areas [
1]; these sensors are connected in networks to interact with other devices without human intervention, which is known as the Internet of Things (IoT) [
2]. Sensors that can communicate with other devices without human intervention are called smart sensors [
3] and are used in different areas, such as health, industry, engineering, and biology, to name a few. An example of a biological application is presented in [
4], in which sensors were employed to communicate with servers within a five-layer IoT architecture (sensing, communication, network, storage, and application), which was used for sheep monitoring. Sensors collected data on the location, posture, and behavior of the sheep with frequencies in the order of MHz and transmitted the data to be processed, saved, and viewed by the end user.
As in terrestrial environments, where smart sensors interact without human intervention, the same principle is applied in aquatic environments to determine the characteristics of the environment and monitor animals, people, plants, and objects in rivers and/or oceans, all using the paradigm known as the UIoT [
5]. The implementation of the UIoT paradigm can be beneficial in the context of autonomous underwater vehicles (AUVs) for data management in which provide a user interface for managing and organizing this data [
6] or in algorithms for data collection to improve data collection efficiency and overcome the limitations caused by node mobility [
7]. An example of an implementation of intelligent sensor communication in marine environments is provided in [
8], in which ocean water quality was monitored through a two-layer architecture (sensing and communication). Sensors collected temperature, dissolved oxygen, pH, and turbidity data from the water, which were sent to the cloud via Wi-Fi communication. Another example is presented in [
9], in which a five-layer architecture (sensing layer, communication layer, networking layer, fusion layer, and application layer) to record temperature, pH, and other types of data from sensors, which were transmitted to servers through underwater acoustic and/or optical communication for storage and analysis. Another example is presented in [
10], in which the authors analyzed the impact of waves on communication between a buoy and an antenna in cellular communication at MHz and GHz frequencies. Effects of wave interference on the quality and reliability of the communication link were observed. However, it is worth noting that implementing higher frequencies in aquatic environments can have negative consequences, including temporary damage to the auditory system or permanent damage to the nervous or auditory tissue of animals, as well as disorientation of migrating animals [
11,
12]. Therefore, it is essential to consider the potential environmental impact and harm to wildlife when deploying communication systems in aquatic environments. In [
13], an RFID communication system employed in saltwater was analyzed using frequencies of 134.5 kHz and 13.56 MHz. The study utilized two RFID readers, MRD2EVM operating at 134.2 kHz and Pepper Wireless C1 USB operating at 13.56 MHz. The readers were submerged in different types of water, and measurements of magnetic fields were taken at distances ranging from 0 to 10 cm. In [
14], marine corrosion was monitored using an RFID system. The study involved submerging RFID tag 28340, RFID tag mifare1 S50, and RFID reader/writer MFRC 522 in both fresh and saltwater. The aim was to assess the reading range of the RFID systems in each of the media. The results showed that long reading ranges were achieved in both fresh and saltwater at low frequencies. The authors of [
15] proposed a wireless communication system based on low-power magnetic induction for the transmission and retrieval of data from autonomous underwater vehicles (AUVs). The study involved mathematically characterizing the dynamics of the MI channel and deriving the available bandwidth based on the coupling coefficient between two coil antennas. The authors also developed a software-defined MI communication test bed system using MATLAB and USRP and verified its performance through simulations. The simulations conducted in the study yielded a transmission simulation distance of 0.81 m.
However, the works discussed above implemented signals with frequencies in the MHz or GHz range, which can have adverse effects on marine fauna. On the other hand, studies implementing signals in the kHz range are limited by the capabilities of RFID readers and magnetic induction design and focus solely on data reception underwater without considering subsequent data transmission to the Earth’s surface. To address these limitations, in this work, we propose a four-layer architecture comprising detection, communication, networking, and storage. Our focus is on characterizing the communication of smart sensors, considering two types of data reception. The first type involves the use of RFID technology with magnetic induction at a frequency of 125 kHz, enabling data reception in a saline marine environment between a mobile node and a static node at a known geographical location. We analyze the penetration depth of magnetic induction signals to determine the range of data reception between these nodes. The second type of data reception utilizes Wi-Fi technology to facilitate communication between static nodes and an antenna located on the Earth’s surface. The impact of ocean waves on data reception is analyzed using wave data recorded by the Laboratory of Coastal Engineering and Processes located at Sisal Beach, Yucatan, Mexico. Based on these data, the probability of data reception via line of sight between the antennas is calculated.
The research aims to validate the reception of data in a sensor network architecture in two distinct environments: a marine environment and an above-sea environment. In the marine environment, the data signals operate at frequencies in the order of kHz, specifically chosen to minimize any potential impact on marine fauna. On the other hand, in the above-sea environment, the data reception is affected by the presence of waves, which can potentially disrupt the reception of data signals. This contributes to the advancement of sensor network technology for marine and surface applications.
The contributions of this work are summarized as follows:
Validation of a sensor network architecture to be implemented in marine environments;
Validation of low-frequency data reception, which is useful in marine environments;
Verification of the viability of the two proposed types of communication in the smart sensor architecture.
By addressing these aspects, this research offers valuable insights into the design and implementation of a sensor network architecture for marine environments. The results presented herein validate the reception of data at low frequencies as a useful approach in marine environments and confirm the viability of the proposed communication methods for smart sensors in such environments.
The remainder of this paper is organized as follows. In
Section 2, the design of the proposed smart sensor architecture is described. In
Section 3, simulations of the communication between mobile nodes and the static node are described, and the penetration depth and LoS of the communication between the static nodes and the terrestrial antenna are analyzed, considering the environmental conditions. In
Section 4, we present and discuss the results. Finally, conclusions are drawn in
Section 5.
3. Results
MATLAB® software version 2022a was run on a Lenovo Ideapad Gaming 3 computer with an AMD Ryzen 5 processor 4000 series for different test scenarios, as described below.
In the first scenario, data reception between mobile and static nodes was analyzed. For this scenario, an RFID reader with an omnidirectional antenna placed at a known geographical point is considered; the RFID reader is submerged in water, while the other node is moving in the water, with another omnidirectional antenna containing the label (see
Figure 4; the green and orange dotted lines represent the reception of data between the mobile and static nodes). Analysis was carried out to determine whether the particles of the aquatic environment at the proposed frequency allow for the passage of a signal. This scenario was implemented using Algorithm 1, in which the penetration depth of frequencies ranging from 0 to 10 GHz is obtained, considering the characteristics of the environment with average conductivity values in the sea of
, the relative permittivity of 81, and relative permeability of 0.999991 [
24].
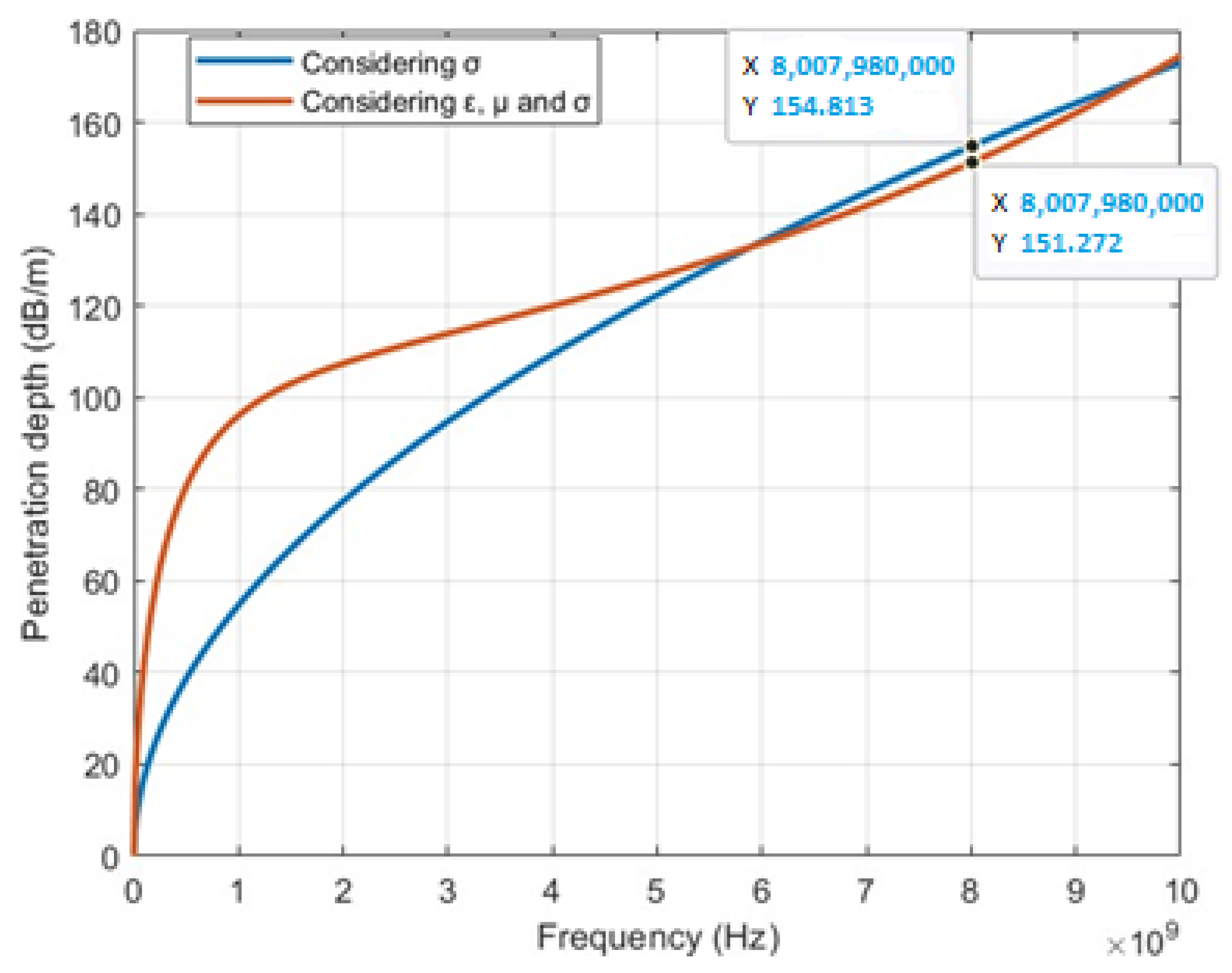
The depth of penetration is represented in
Figure 5 based on the implementation of Algorithm 1. The blue curve represents the depth of penetration when only the conductivity of the medium is considered, whereas the red curve represents the depth of penetration, taking into account the conductivity, permittivity, and permeability of the medium. For a frequency of 8.00798 GHz, considering only the conductivity, the penetration depth is
. However, when all three parameters (conductivity, permittivity, and permeability) are considered, the penetration depth is slightly reduced to
, suggesting that the additional factors of permittivity and permeability have a slight impact on the depth of penetration.
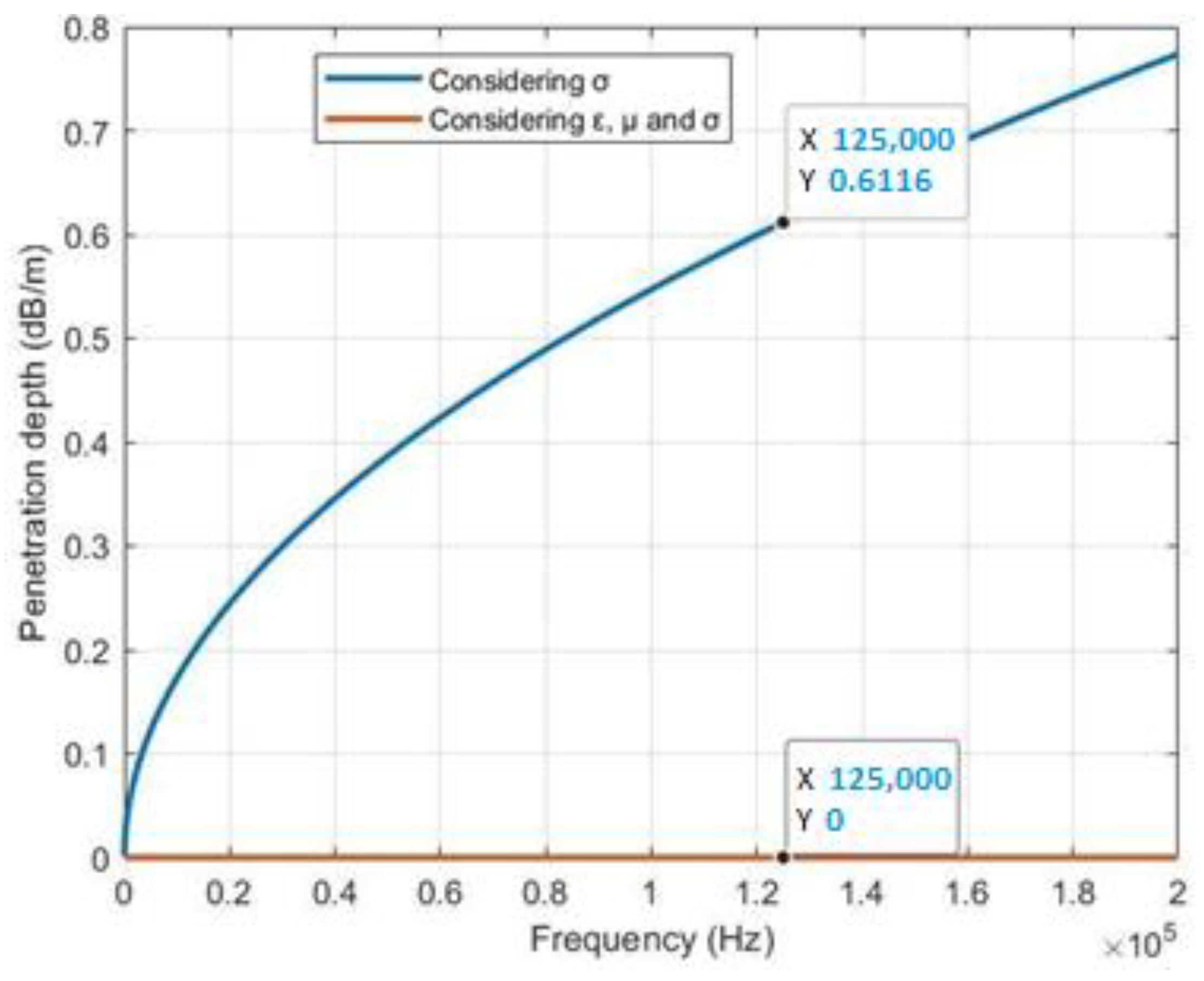
Figure 6 shows the behavior of the penetration depth with a 125 kHz signal of interest; the blue line indicates that the penetration depth reaches a value of
, whereas the red line shows a value of
. This comparison shows an abrupt change when incorporating conductivity, permittivity, and permeability compared to considering only conductivity.
In the second scenario, the focus is on the reception of data between the static nodes and the terrestrial antenna, considering the presence of waves in the medium. To determine the feasibility of reception despite the waves, the probability of LoS communication is considered. The analysis of this test scenario is divided into two parts.
The first half of the scenario involves the reception of data between the static nodes, as illustrated in
Figure 7. The purple dotted line represents the data reception between the antennas, and “dn” denotes the distance between the static nodes. Because commercial RFID readers typically have a range of 1 m in terrestrial environments, and considering a penetration depth of 0.6116 dB/m for data reception between the static node and the mobile nodes, we recommend that the static nodes be positioned 1 m apart.
To determine the ideal antenna height for optimal data reception, the antenna of one static node is set at 0 m above sea level, and the antenna of the other static node is tested at three possible heights relative to sea level: 0 m, 0.5 m, and 1 m. The objective is to find the antenna height that offers the best data reception performance in the given scenario.
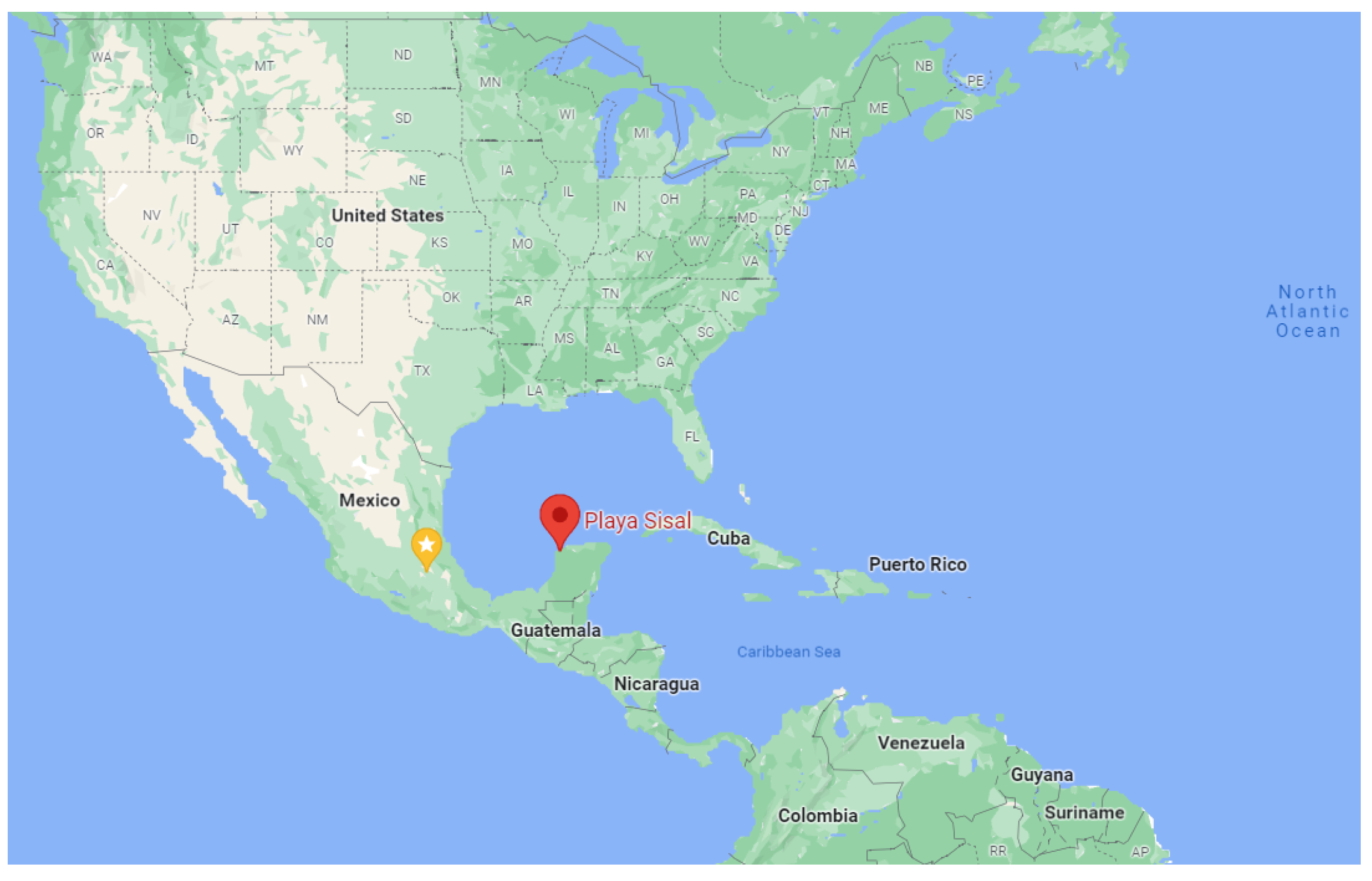
The simulation uses ocean wave data collected from the Gulf of Mexico region, specifically Sisal Beach on the Yucatan peninsula. The data were obtained from the Southeast Coastal Observatory [
25], covering the period from March to November 2019.
Figure 8 depicts the geographical location of Sisal Beach (indicated in red), and
Table 1 displays a fragment of the database.
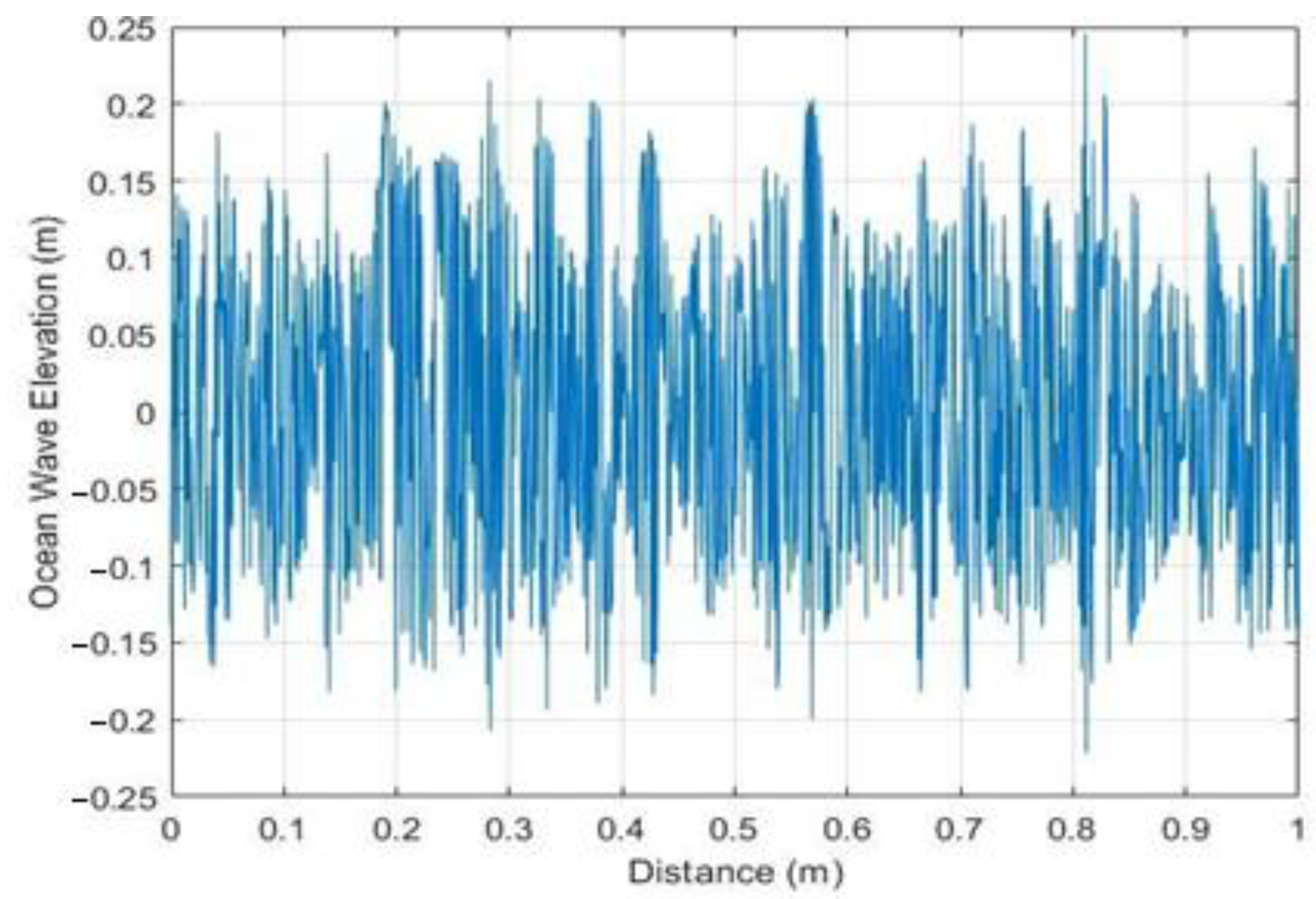
For this test scenario, a sample of 1000 SWH values recorded at Sisal Beach, Yucatan, Mexico, was implemented via Equation (5) using MATLAB 20222a software, yielding the data presented in
Figure 9, with ocean waves at a distance of one meter, where the distance of x represents the offset angle added to the current wave by the previous wave, providing a true representation of how the waves affect the LoS for data reception between the antennas of the static nodes that are located on the sea surface. In
Figure 9, 0 represents sea level; the largest value was at 0.2455 m, which represents the highest peak in the sample, and −0.2214 m is the lowest value in the spectrum, which represents the deepest valley of the sample. This simulation provides valuable insights into the characteristics of the ocean waves at Sisal Beach, enabling a better understanding of how these waves influence the LoS for data reception between the antennas of the static nodes. These data contribute to the assessment of the underwater communication environment in the proposed architecture by providing a realistic representation of wave behavior.
Once the wave sample has been obtained, the probability of data reception between the static nodes is obtained by implementing the Rayleigh distribution. For this test scenario, an antenna is proposed at three different heights—0 m, 0.5 m, and 1 m—all with a separation between nodes of 1 m. Using Algorithm 2 in MATLAB, the number of times the LoS is not blocked is obtained, and the probability density function (PDF) of the data reception is calculated.
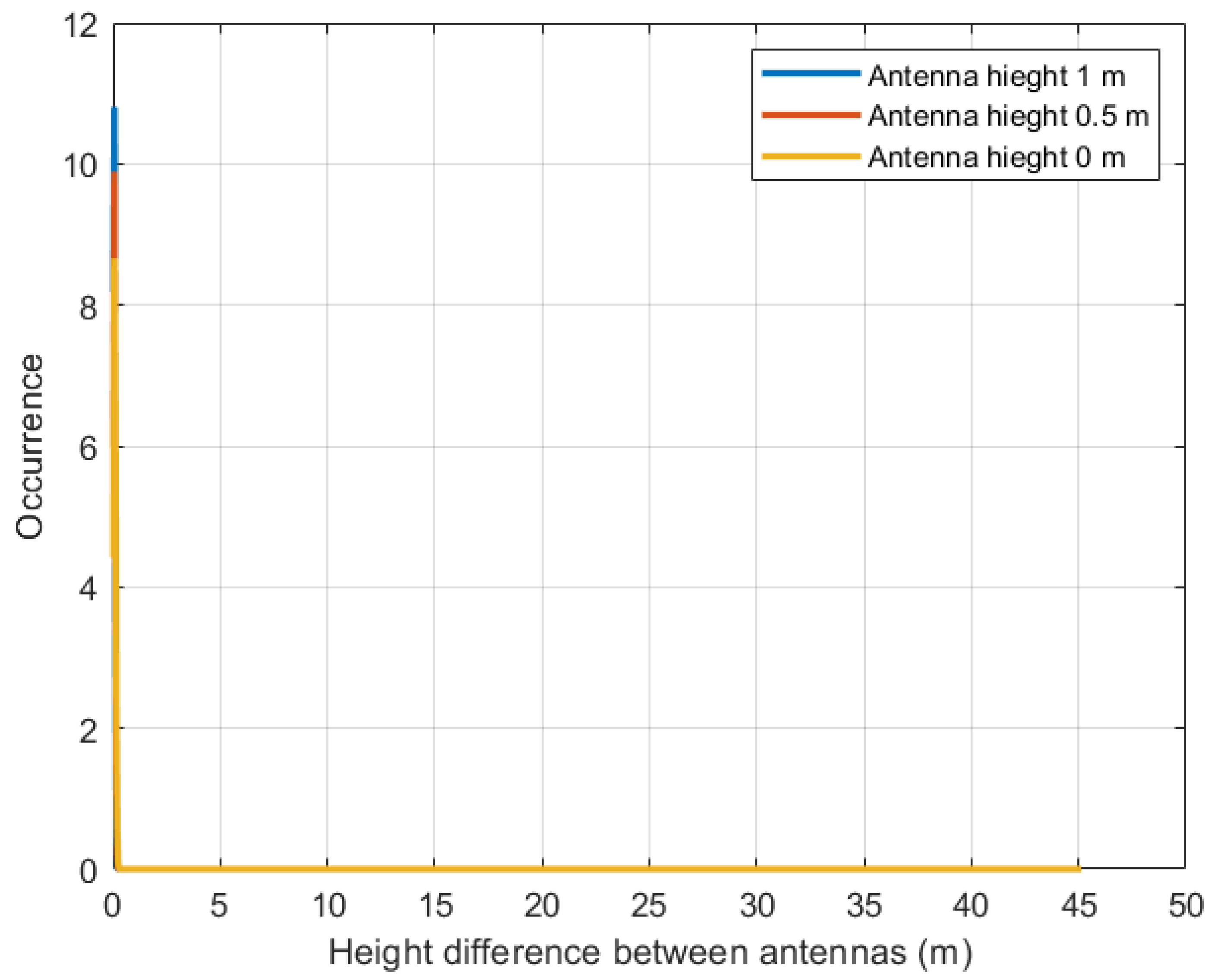
Figure 10 illustrates the impact of difference between antenna heights on data reception, with the blue line representing a node antenna height of 1 m, the red line representing a height of 0.5 m, and the yellow line representing a height of 0 m.
The corresponding probabilities of data reception for these antenna heights are summarized in
Table 2, which presents the average results from 10 rounds of experiments. For an antenna height of 0 m, the probability of data reception is 54.2%, with the occurrence range centered around a height difference of 0 to 0.2886 m. At an antenna height of 0.5 m, the probability increases to 70.6%, centered on a height difference of 0 to 0.2573 m. Finally, at an antenna height of 1 m, the probability reaches 94.5%, with a range of height difference between antennas ranging from 0 to 0.2362 m. Comparing these probabilities reveals that higher antenna heights result in steeper slopes of the plots, indicating improved data reception as the antenna height increases. This suggests that raising the antenna height can significantly enhance the probability of data reception.
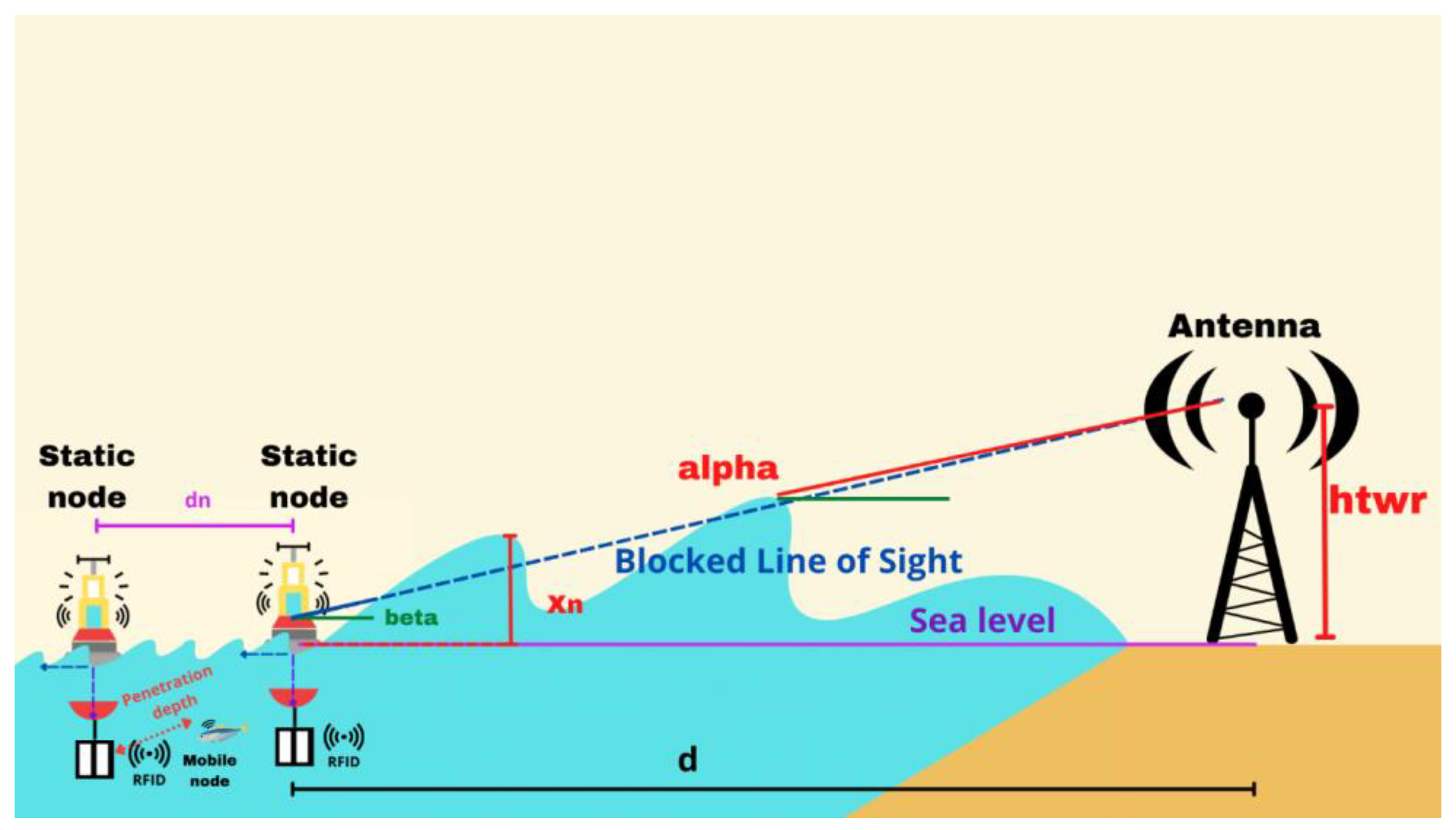
Part two of the second test scenario focuses on the data reception between the static node and the ground antenna, and as in the first half, the static node device is considered to be at sea level, the height of the ground antenna device between is considered to be between zero and one meter (i.e., sea level), and the terrestrial antenna is considered to be at a height of 45 m above sea level.
Figure 11 shows a depiction of the considered scenario, where d is the distance between the terrestrial antenna and the static node,
is the height of the wave above sea level, the continuous blue line is the LoS without blocking, the dotted blue line is the blocked LoS, alpha is the angle of the line between the sea surface and the terrestrial antenna, and beta is the angle between the LoS and the horizontal sea level.
For this scenario, Algorithm 2 is implemented with the data reception between the static node and the antenna considered as parameters. The wave sample for this scenario is 1 km, as shown in
Figure 12, where
represents the phase angle added to the current wave by the previous wave, providing a real representation of the waves that affect the LoS for data reception between the static node and the terrestrial antenna; likewise, 0 represents sea level, with a maximum value of 0.3763 m and a minimum value of −0.3735 m.
The probability of data reception between the static node and the terrestrial antenna is calculated using the sample wave. The conditions include a terrestrial antenna height of 45 m, and we consider three different heights for the node antenna: 0 m, 0.5 m, and 1 m. By implementing Algorithm 2 in MATLAB, we obtain the probability distributions, which are depicted in
Figure 13, and which illustrate the impact of differences in antenna height on data reception between the node and terrestrial antenna, with the yellow line representing a node antenna height of 0 m, the red line representing a height of 0.5 m, and the blue line representing a height of 1 m. The corresponding probabilities of data reception for these antenna heights are summarized in
Table 3, which presents the average results from 10 rounds of experiments. For an antenna height of 0 m, the probability of data reception is 98.1%. At an antenna height of 0.5 m, the probability increases to 99.2%. Finally, at an antenna height of 1 m, the probability reaches 100%. This suggests that raising the antenna height can significantly enhance the probability of data reception.
4. Discussion
The characterization of penetration depth at different frequencies reveals important insights into the behavior of signals in marine environments. At high frequencies such as GHz when considering the values of µ, ε, and σ, the penetration depth is determined to be 162.195 dB/m. If only the value of σ is considered at this frequency, the penetration depth is slightly higher, at 164.273 dB/m.
Similarly, at a frequency of GHz, considering µ, ε, and σ, the penetration depth is measured to be 151.272 dB/m. When only considering the value of σ, the penetration depth is slightly higher, at 154.813 dB/m.
At a frequency of 125 kHz, the penetration depth in the marine environment is expressed as
, where the imaginary component represents a complex value. According to the literature [
26], complex values tend toward infinity, indicating zero penetration depth. However, some studies [
27] have demonstrated signal penetration in the marine environment considering only
σ, resulting in a penetration depth of 0.6116 dB/m.
Table 4 provides a comparison with other relevant works, analyzing a real database and exploring data reception both underwater and on the surface without harming the fauna in the environment.
In the analysis of data reception between nodes, the height of the antenna plays a crucial role. When considering three different heights, a height of 0 m, there is a 54.2% probability of data reception. As the antenna height increases, the probability of reception also increases, reaching a reception probability of 94.5% at higher antenna heights.
This probability trend is also reflected in the reception of data between the terrestrial antenna and the static node. At a height of 0 m, the probability of reception is 98.1%, indicating a high likelihood of successful data reception. However, when the antenna height is increased to 1 m, the probability of reception reaches 100%, ensuring a guaranteed reception of data between the terrestrial antenna and the static node.
These probabilities highlight the importance of antenna height in achieving reliable and consistent data reception between nodes in the given scenario.
Likewise, the use of ultrasonic signals for communication in marine environments is not considered viable due to the potential harm it can cause to marine fauna. Ultrasonic signals can lead to temporary hearing loss, organ damage, and disorientation in cetaceans [
11,
12]. Additionally, ultrasonic communication is susceptible to various factors, such as multipath effects, Doppler shift, temperature, pressure, salinity, and environmental noise [
28]. Therefore, any analysis or design involving communication in marine environments must carefully consider all these variables to ensure the safety and well-being of marine fauna.
Table 4 provides a comparison of the results obtained in the current investigation with the results of previous studies in the literature. The parameters taken into consideration for the comparison include the propagation method, transmission frequency, penetration depth, underwater data reception, data reception on the sea surface, and the availability of a public database wave sample. The table shows that all studies, except for [
8], employ magnetic induction for signal propagation. Additionally, only [
12] operates at a frequency of 125 kHz. The investigations in [
8,
12] consider the depth of penetration, but the current investigation achieves a greater signal penetration. Furthermore, the current investigation is the only one that accounts for data reception in two different environments and implements a public database of a real beach for conducting simulations.
This suggests that the current investigation stands out in several aspects compared to the previous studies listed in the table. It utilizes a different propagation method, operates at a frequency that does not affect marine fauna, achieves greater penetration depth, incorporates data reception in multiple environments, and utilizes a publicly available database for realistic beach simulations. These distinctions highlight the novelty and potential contributions of the current investigation.
5. Conclusions
This paper discussed data reception in a sensor network architecture for marine environments. It explored two different scenarios: data reception using magnetic induction in an underwater environment, and data reception between nodes in the presence of beach waves.
In the first scenario, the reception of data using magnetic induction was examined at different frequencies in an underwater environment. It was determined that magnetic induction is primarily affected by conductivity, and the penetration depths of signals at 125 kHz and 8 GHz were compared. The analysis revealed that the 125 kHz signal had a penetration depth of 0.6116 dB/m, which was lower than that of the 8 GHz signal, which had a penetration depth of 154.813 dB/m. However, it was highlighted that the 125 kHz signal did not affect marine fauna as much as signals in the GHz range.
In the second scenario, data reception between nodes was investigated considering the waves at Sisal beach, Yucatan, Mexico. A sample of 1000 waves was collected to understand their impact on LoS data reception. Three different heights were proposed for the node antennas and analyzed the reception probabilities. The results indicate that at 0 m antenna height, the reception probability was 54.2%, while at 0.5 m, the probability increased to 70.6%, and at 1 m, it further improved to 94.5%. This demonstrates that higher antenna heights result in better data reception.
Furthermore, the paper examined data reception between a node and a terrestrial antenna. The same conditions as those between the nodes were maintained but a distance of 1 km was considered between the objects and a height of 45 m was considered for the terrestrial antenna. The analysis showed that at a node antenna height of 0 m, the reception probability was 98.1%, at 0.5 m, it increased to 99.2%, and at 1 m, it reached 100%. This highlights that higher antenna heights lead to improved data reception in this scenario as well.
This research provides valuable insights and can serve as a guideline for implementing the proposed architecture, considering the parameters studied. Future work will involve validating the data frame, considering additional variables that may affect data reception, and expanding the sample of waves beyond 1000.
Finally, the results are limited to the considerations proposed, such as the use of RFID technology for commercial purposes, the specific beach wave database used, and the proposed node antenna heights. However, the analysis can be reproduced by altering these factors, such as using a different beach database, considering RFID readers with a range exceeding one meter, or exploring alternative node antenna heights to achieve an extended range.

 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}