

Efficacy of Vehicle Scanning Methods in Estimating the Mode Shapes of Bridges Seated on Elastic Supports



Abstract
:1. Introduction
2. Vehicle Scanning Methods
2.1. Reference-Based SSI Method
2.2. Elliptic Filter Method
- Record the dynamic response of the vehicle as it is crossing the bridge of interest.
- Compute contact point (CP) response from the accelerations recorded on the vehicle.
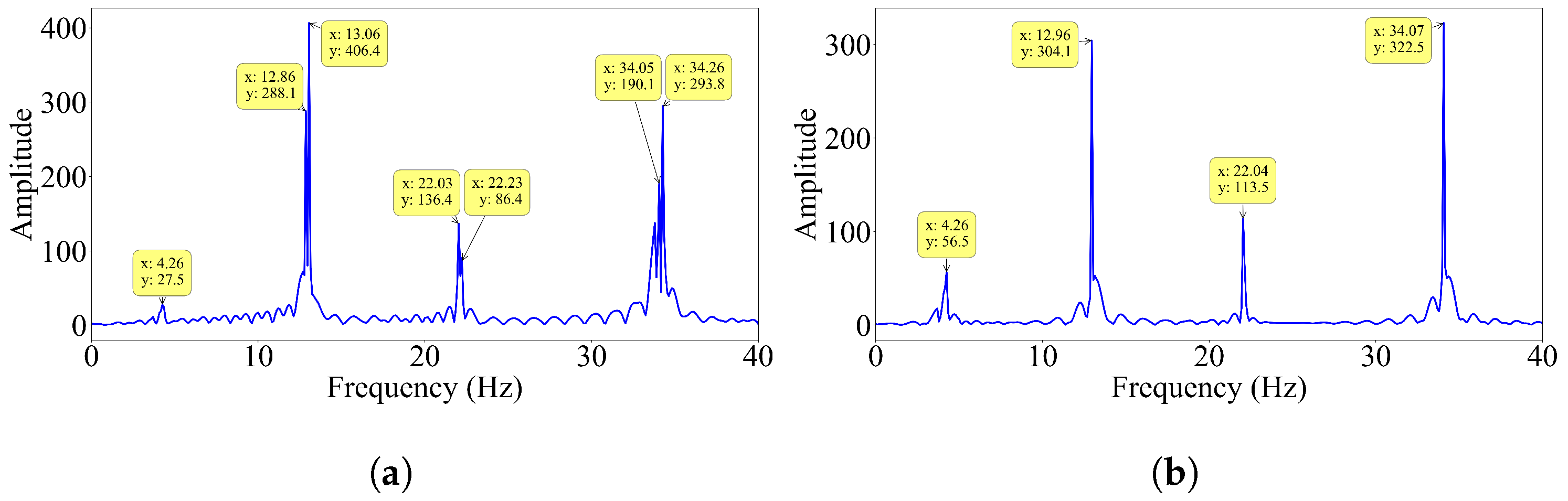
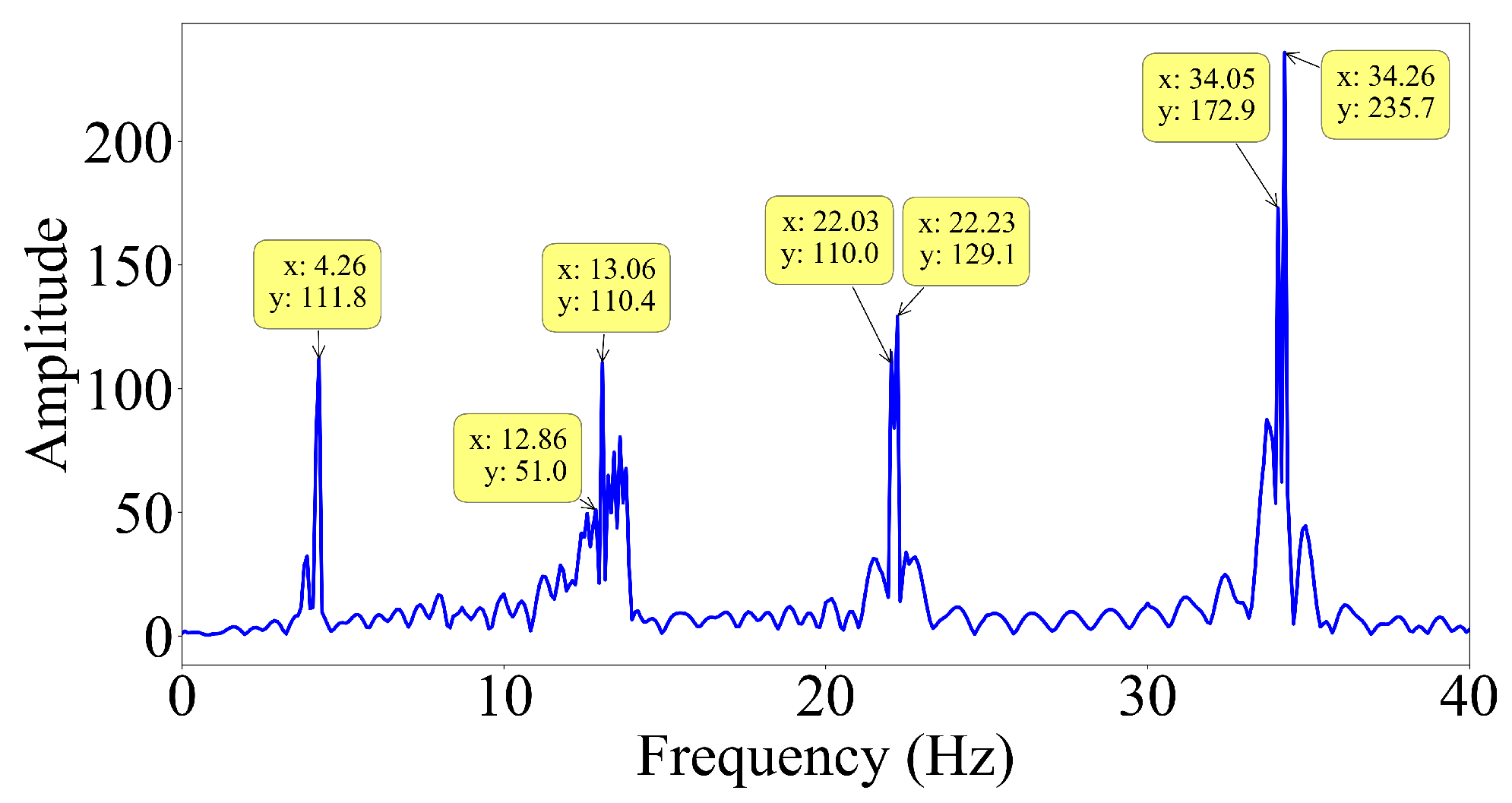
- Compute the Fourier amplitude spectrum (FAS) of the CP response to determine the natural frequencies of the bridge.
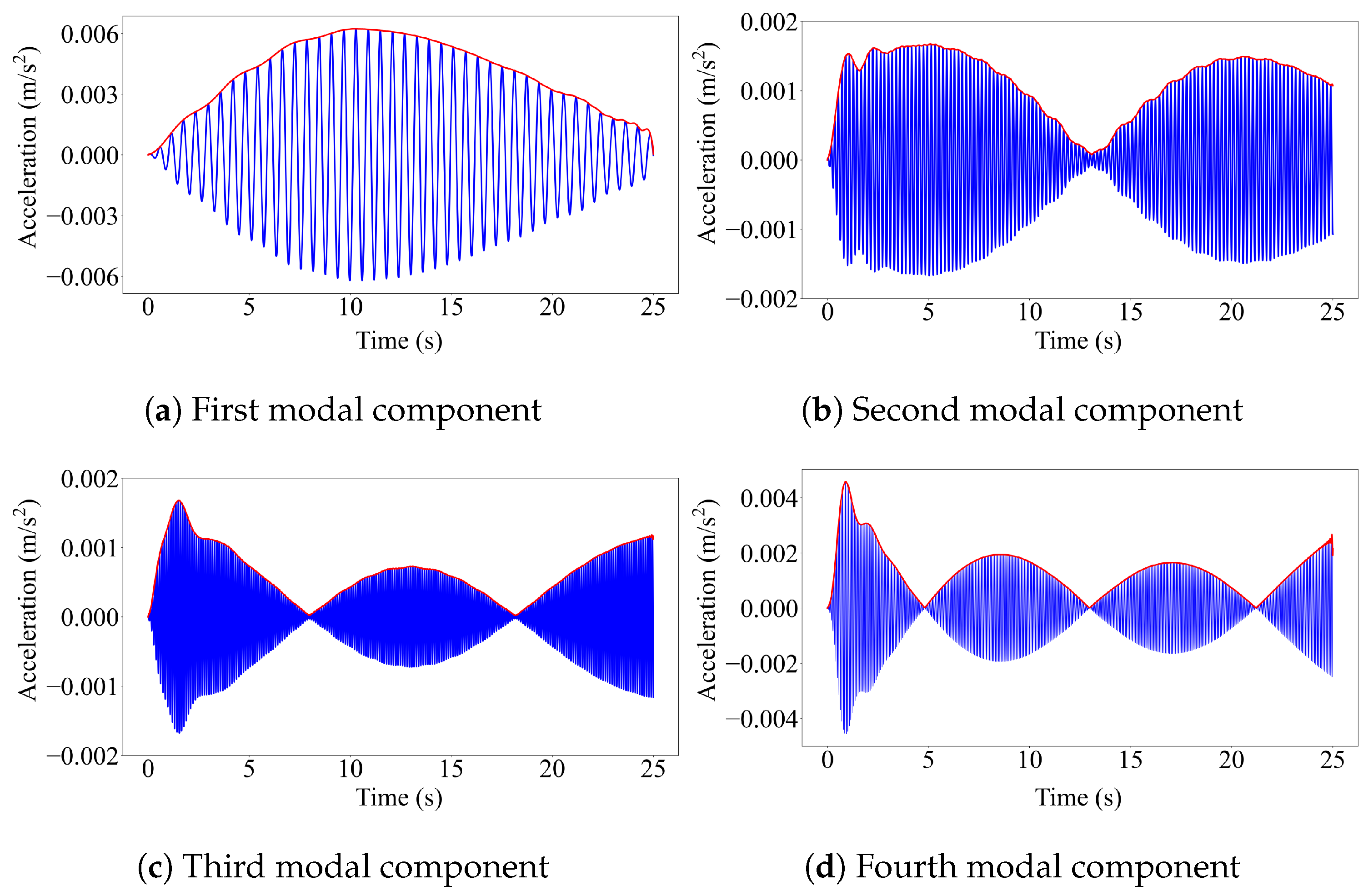
- Decompose the CP response into its modal components using an elliptic filter, which is designed based on the natural frequencies of the bridge and the signal strength to obtain the narrow band signal.
- Calculate the analytic signal from the narrow band signal using the Hilbert transform (HT) and construct the mode shape of the bridge from the instantaneous amplitude of the HT.
2.3. Half-Car Method
3. Numerical Models
4. Numerical Analysis
4.1. Single-Span Bridge
4.1.1. Case I: Smooth Road Profile
4.1.2. Case II: Rough Profile
4.1.3. Case III: Rough Profile with Traffic
4.2. Two-Span Bridge
4.2.1. Case IV: Smooth Road Profile
4.2.2. Case V: Two-Span Bridge: Rough Profile
4.2.3. Case VI: Two-Span Bridge: Rough Profile with Traffic
5. Concluding Remarks
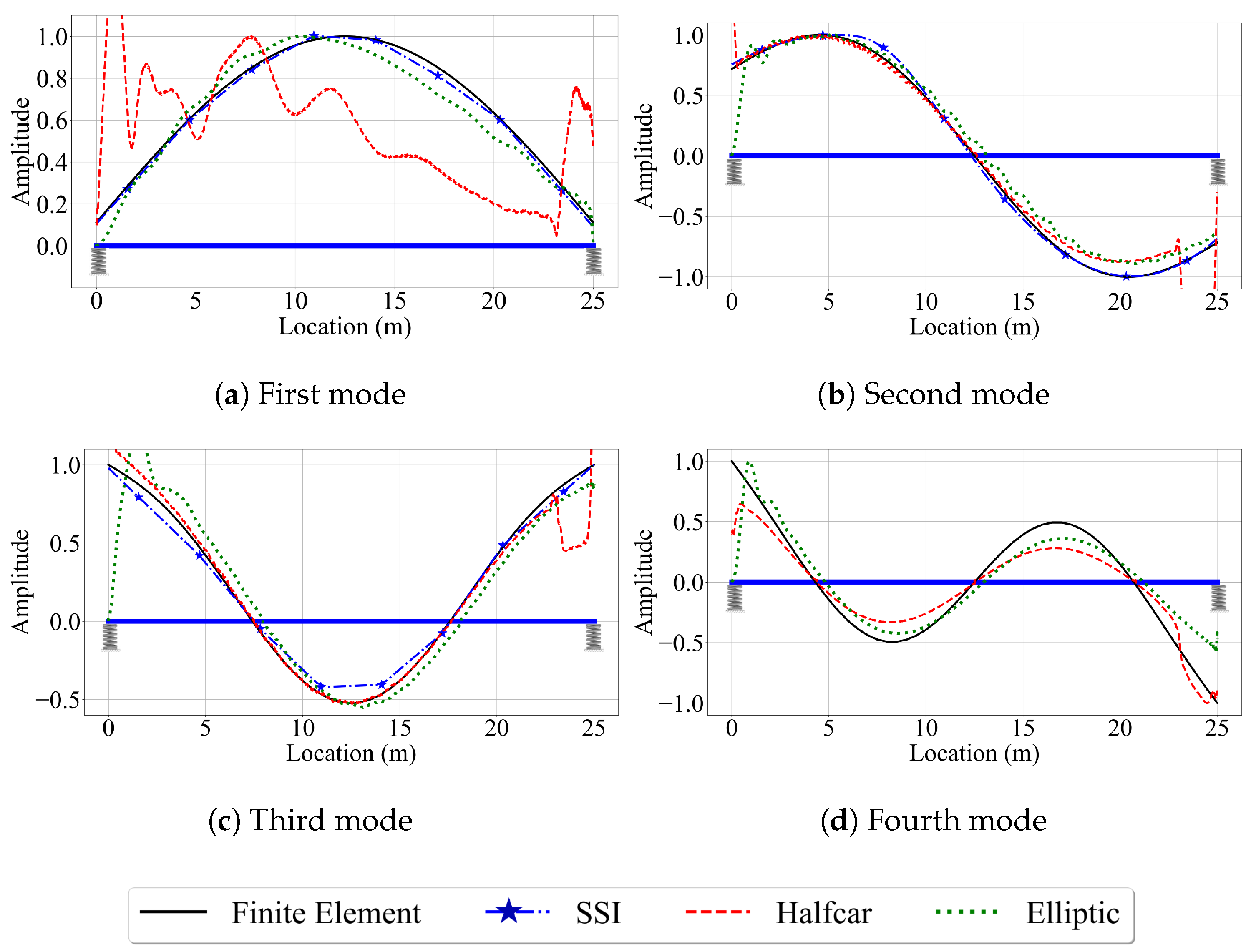
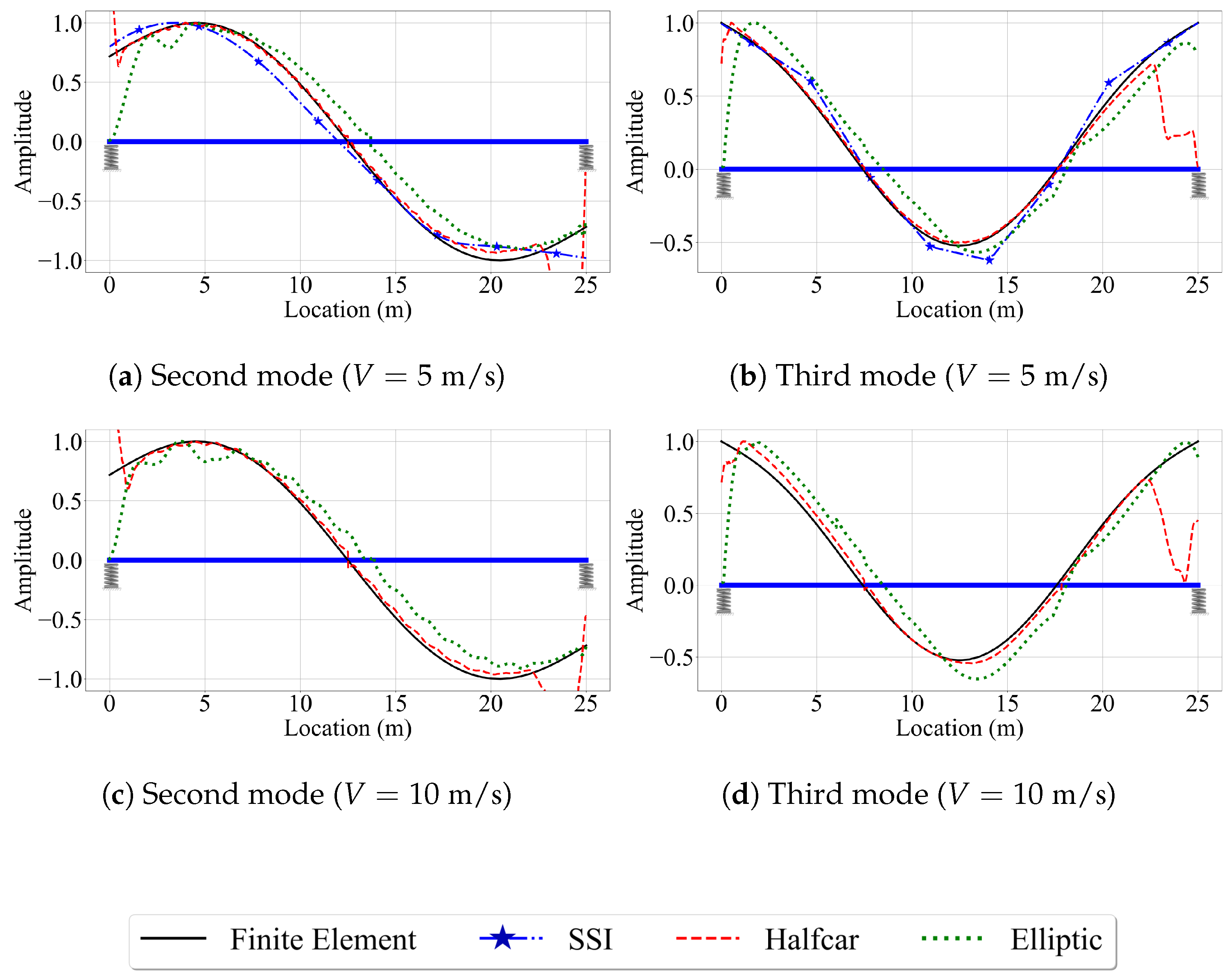
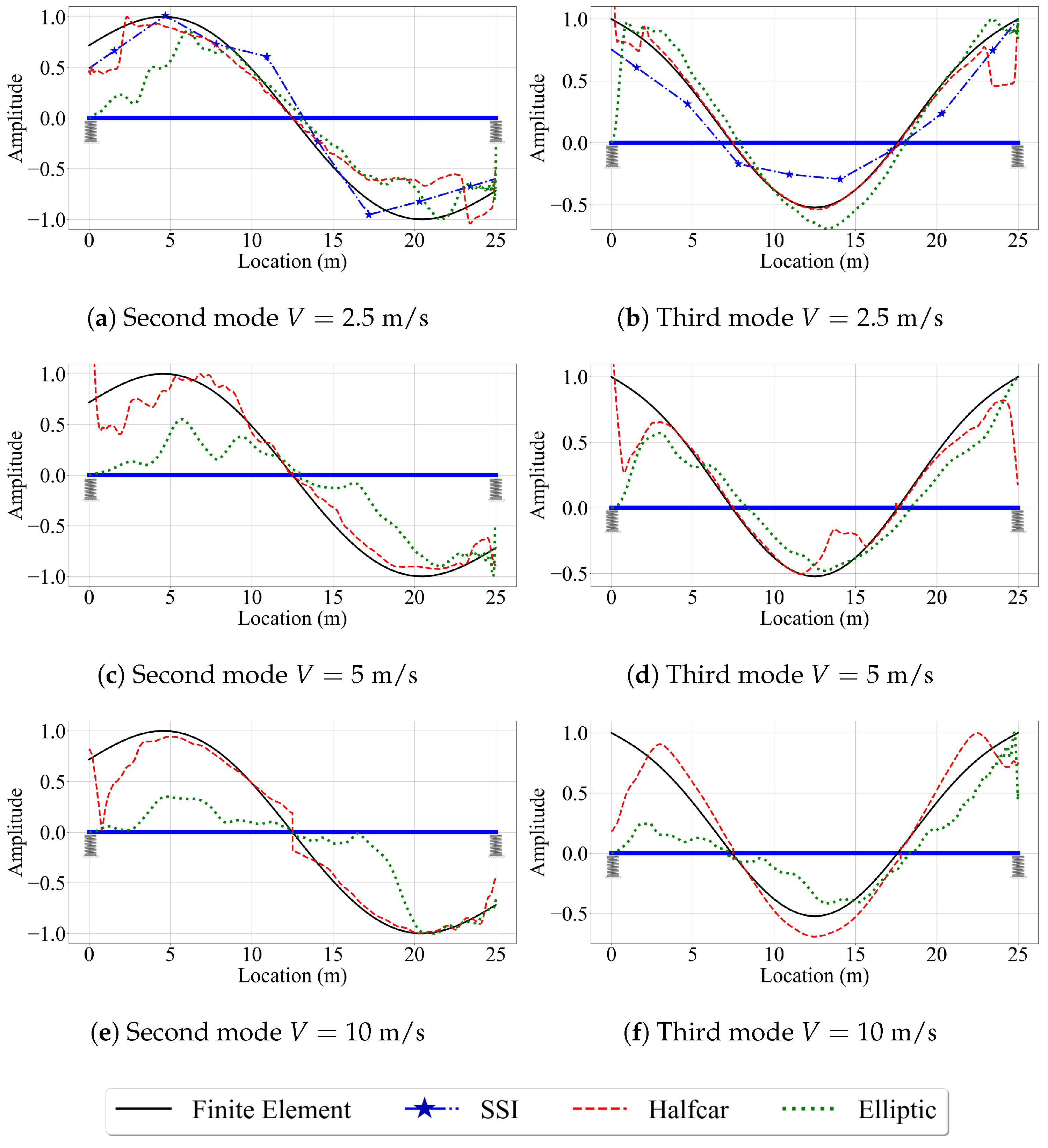
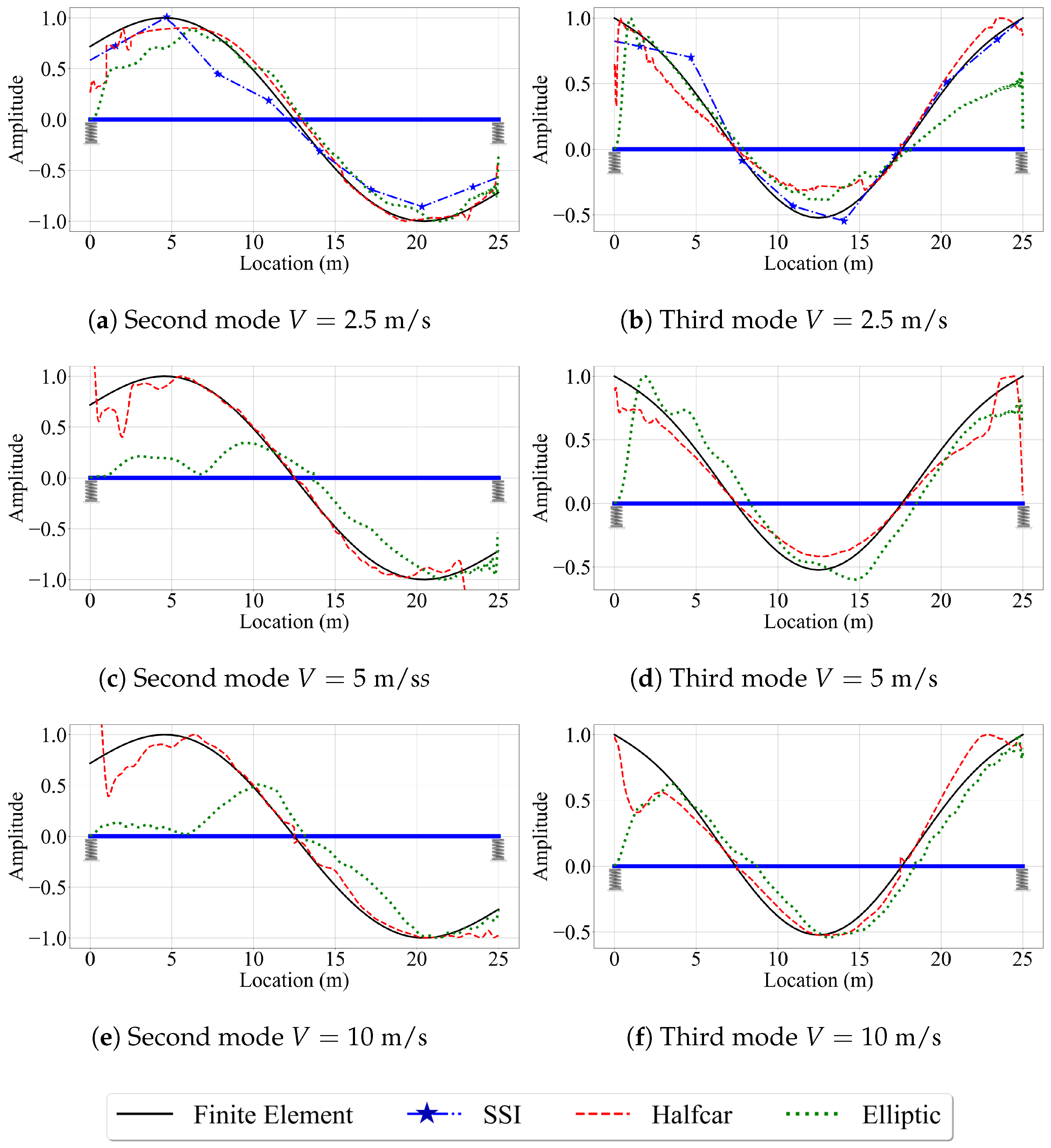
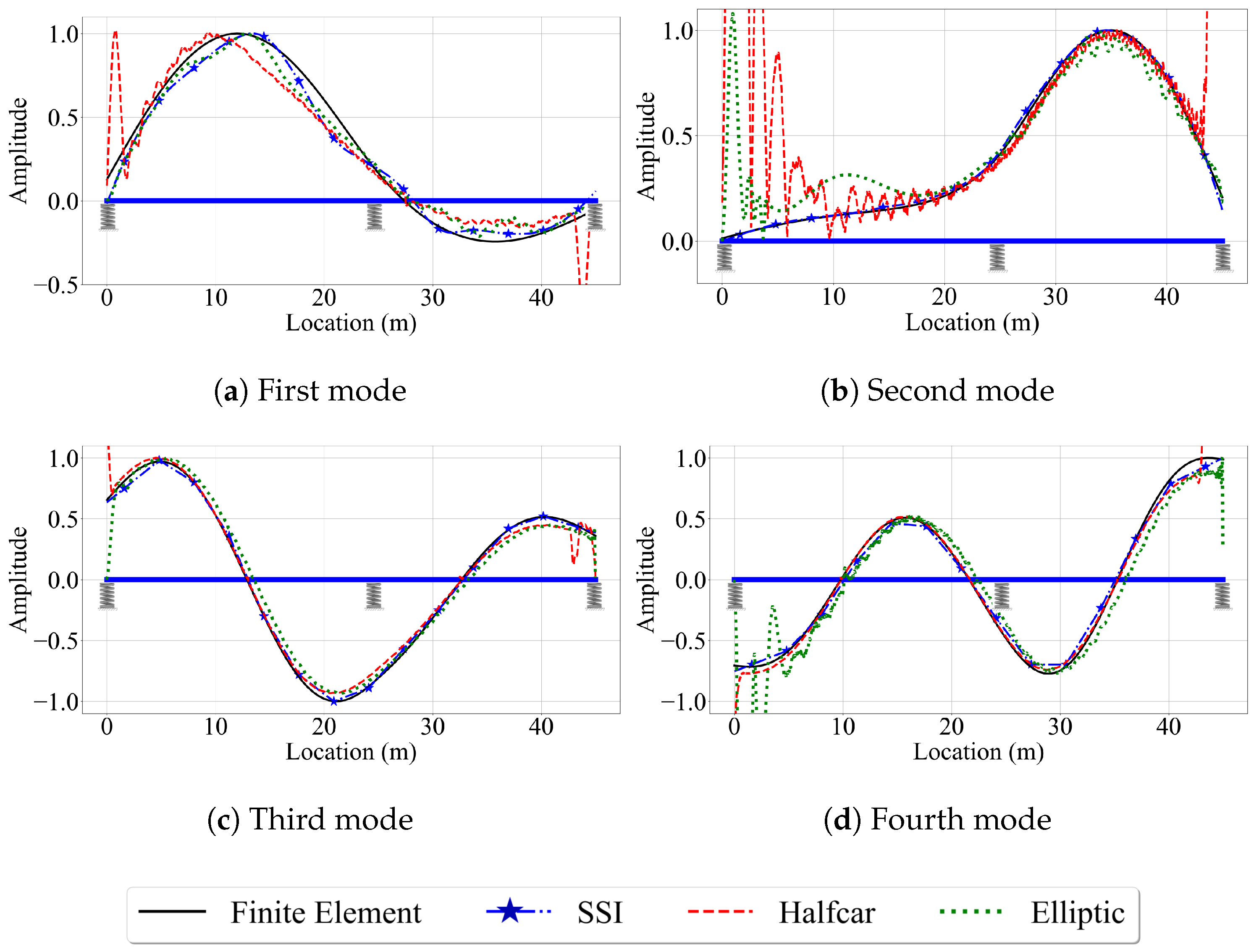
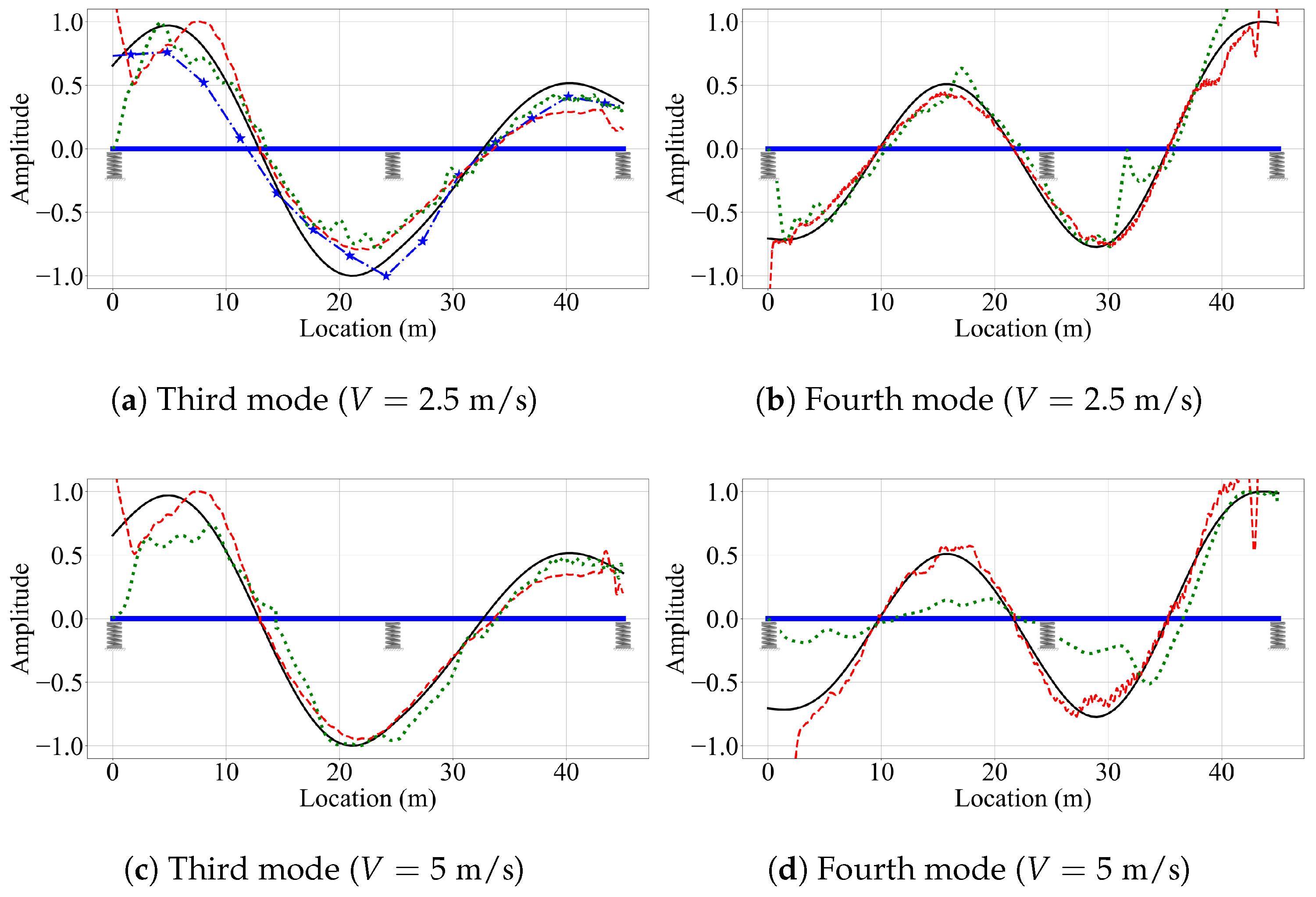
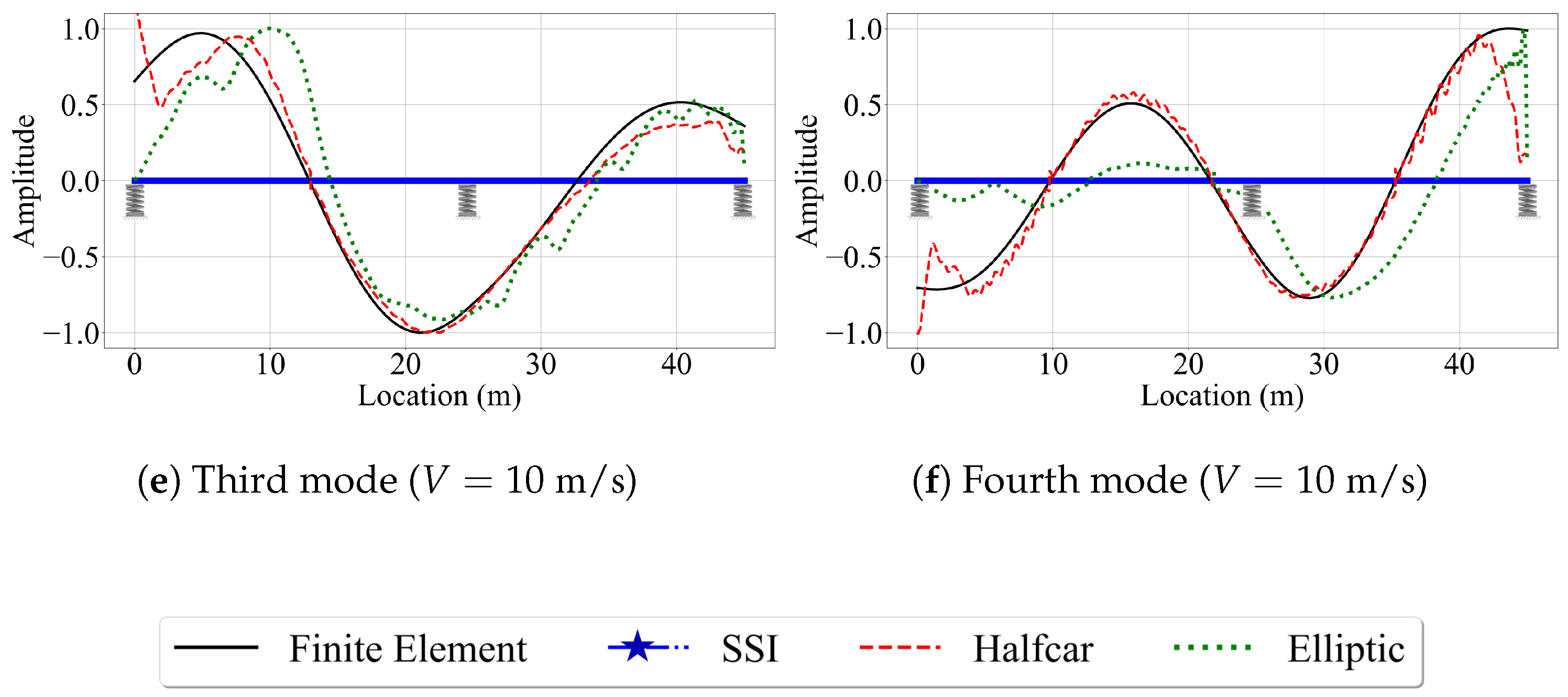
- The reference-based SSI method provides relatively accurate mode shape estimates whenever it succeeds in obtaining stable modes. However, for the majority of the cases we considered, it has failed to provide any mode shape estimates. Specifically, this method is susceptible to the negative effects of higher vehicle speeds and road roughness. Due to its sensitivity to the number of data points available at each bridge segment, segmentation of the bridge needs to be carefully conducted, considering the sampling rate and the vehicle speed.
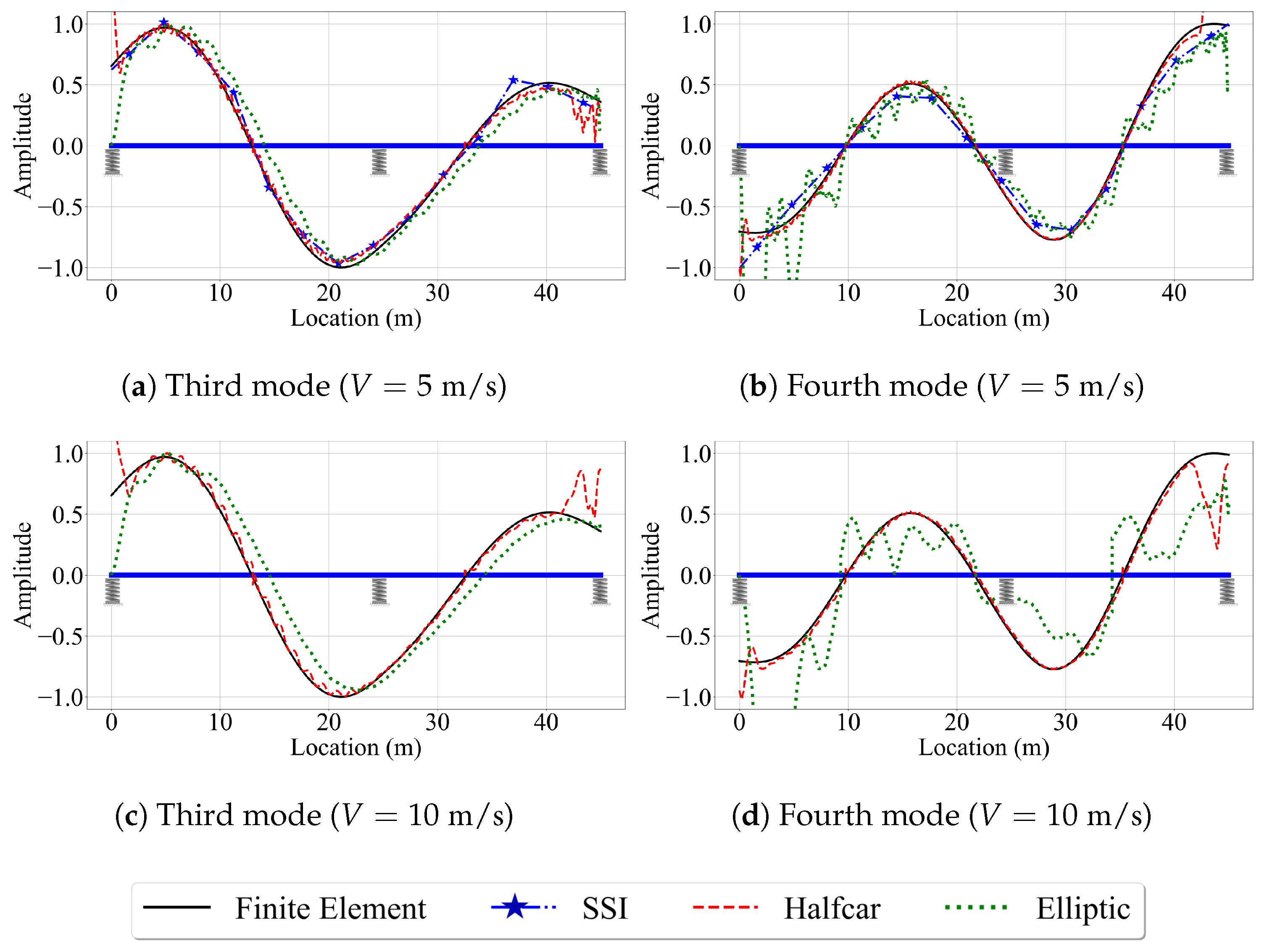
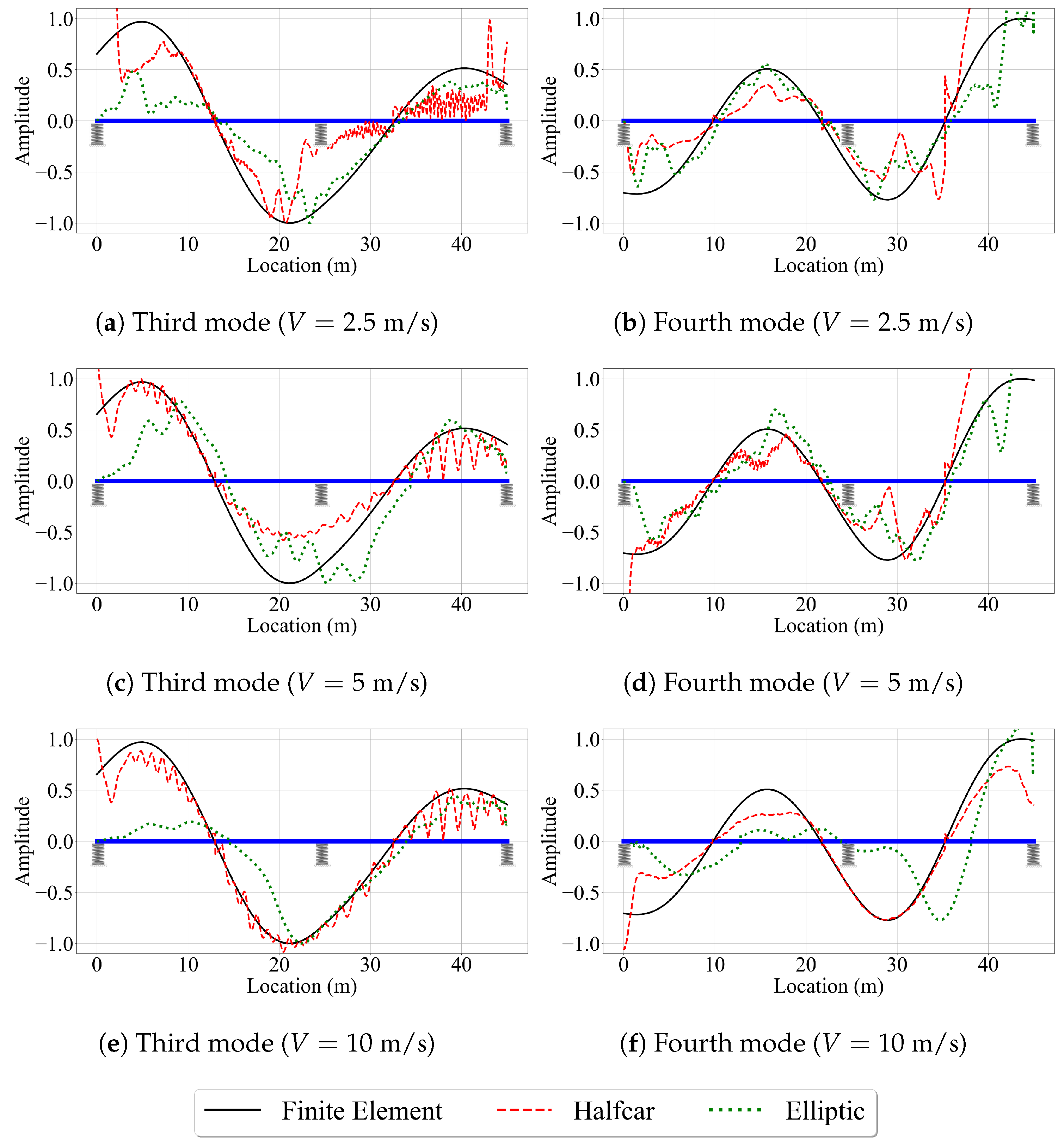
- The half-car method is robust against the negative effects of vehicle speed and yields improved mode shape estimates, even at high speeds. It successfully alleviates the negative effects of road roughness. However, it may result in inaccurate mode shape estimates when the pitching frequency of the vehicle, which is not present in a quarter-car model, interferes with any bridge mode.
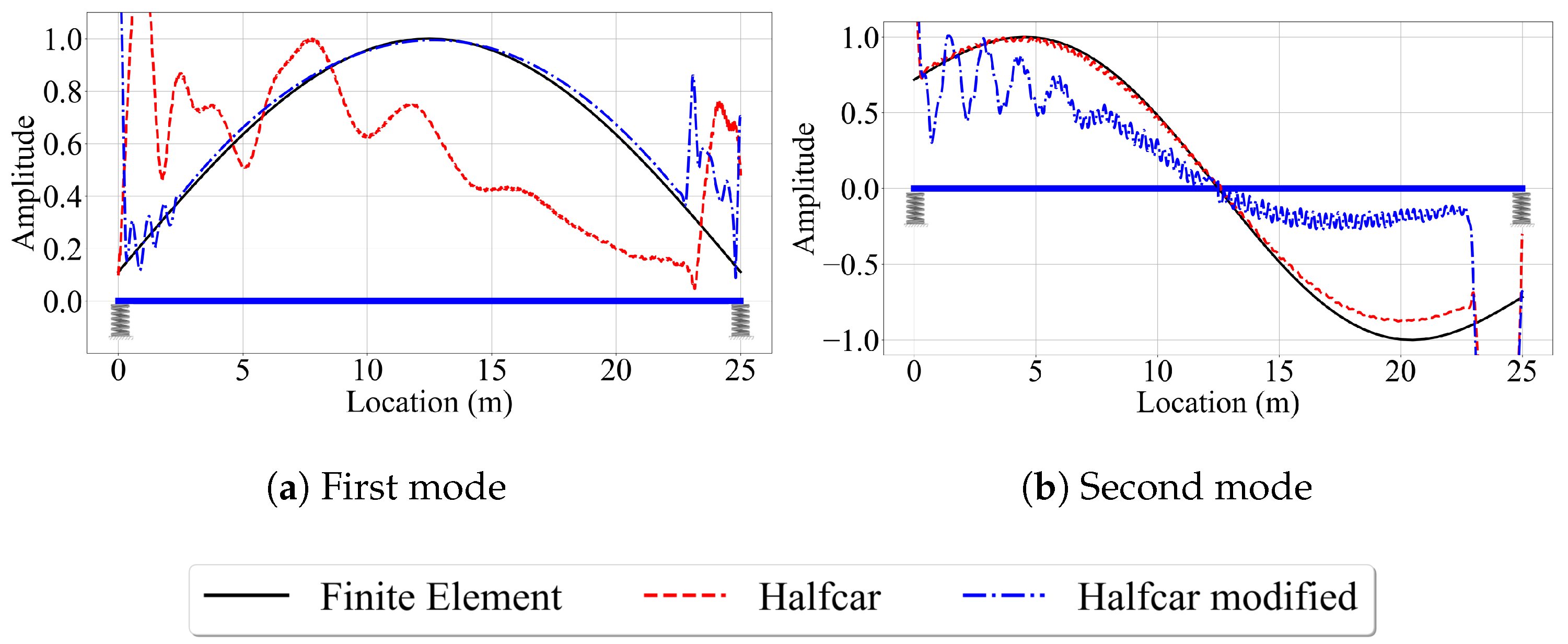
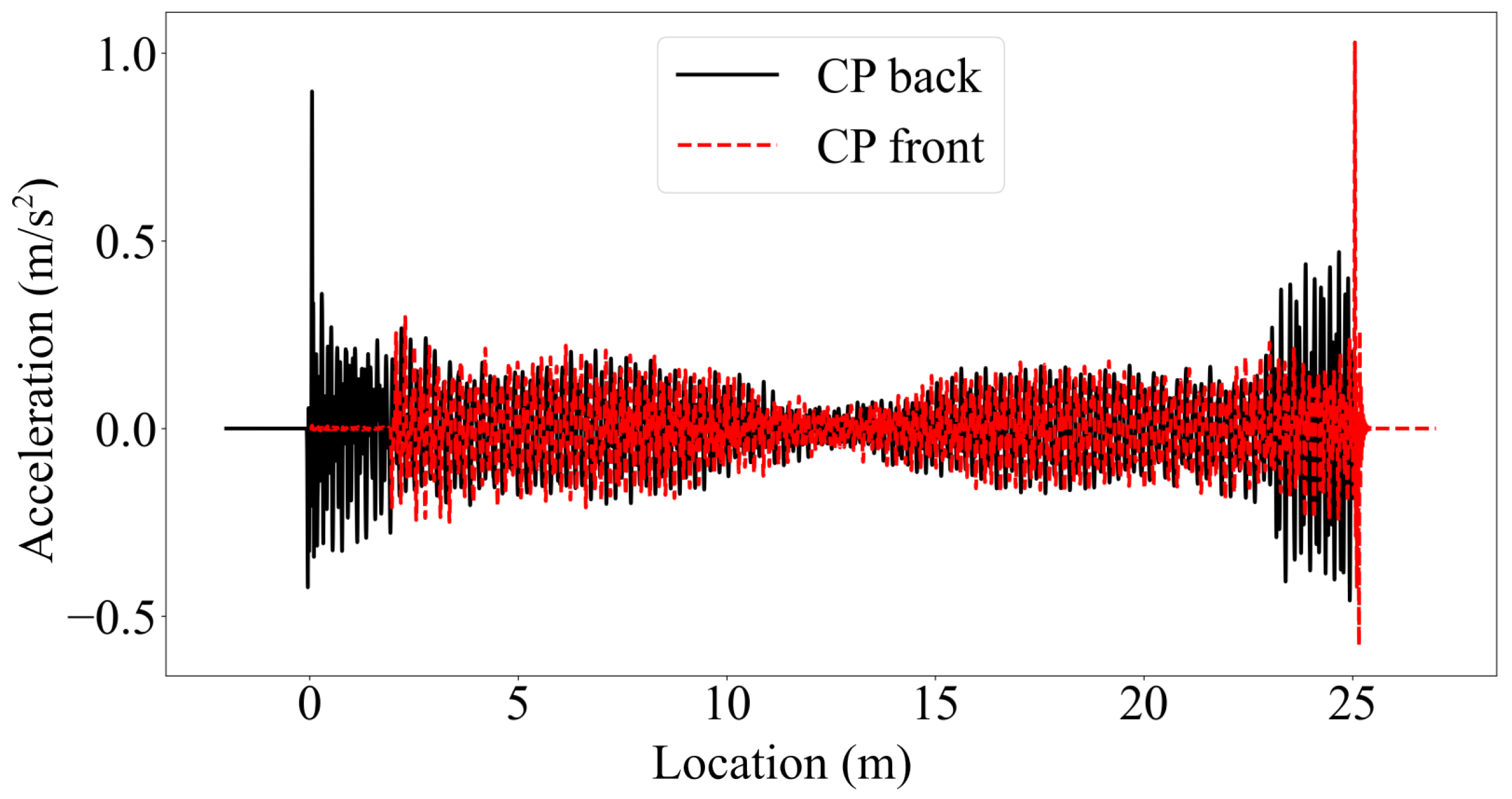
- The elastic supports and using a half-car model provide a combined effect that leads to a significant decrease in the mode shape estimates provided by the half-car method at the edges of the bridge. Due to a change in the total load carried by the bridge at the instant of an axle entering or leaving a bridge via an elastic support, the bridge displacement profile changes suddenly leading to amplifications in the CP accelerations. These amplifications then distort the modal components identified using variable decomposition method leading to inaccurate mode shape estimates at the bridge ends. Considering that the majority of the bridges are seated on elastic supports and the likelihood of using a vehicle with two or more axles in vehicle scanning applications, it is imperative to include this combined effect in future VSM studies.
- Elliptic method yields mode shape estimates that are relatively similar to the half-car method. However, it exhibits a shift in the identified mode shapes as the vehicle speed increases and is negatively affected by road roughness. Using a quarter-car provides this method with an advantage in numerical analysis as it avoids potential negative effects caused by the pitching frequency, which are experienced when a half-car model is used.
- The number of spans, despite the presence of an elastic support at the middle support, did not affect the efficacy of the VSMs because the results for the single-span bridge and the two-span bridge are comparable to each other with no significant impact from the middle support.
- Based on the presented results and the two previous items discussed in the conclusions, we can state that utilizing a quarter-car model can offer advantages. However, these observations only reinforce the need to accurately model the vehicle in the numerical models used to assess or develop VSMs. If a single car with two axles is used in the field applications, using a quarter-car model in numerical analysis can potentially hide the problems that can be encountered when the method is used in the field. Thus, it is imperative for any numerical study to accurately model the instrumented vehicle and the vehicle.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gonen, S.; Erduran, E. A Hybrid Method for Vibration-Based Bridge Damage Detection. Remote Sens. 2022, 14, 6054. [Google Scholar] [CrossRef]
- Dilena, M.; Limongelli, M.; Morassi, A. Damage localization in bridges via the FRF interpolation method. Mech. Syst. Signal Process. 2015, 52, 162–180. [Google Scholar] [CrossRef]
- Seo, J.; Hu, J.W.; Lee, J. Summary review of structural health monitoring applications for highway bridges. J. Perform. Constr. Facil. 2016, 30, 04015072. [Google Scholar] [CrossRef]
- Demirlioglu, K.; Gonen, S.; Erduran, E. On the Selection of Mode Shapes Used in Optimal Sensor Placement. In Sensors and Instrumentation, Aircraft/Aerospace and Dynamic Environments Testing, Volume 7: Proceedings of the 40th IMAC, A Conference and Exposition on Structural Dynamics 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 85–92. [Google Scholar]
- Kamariotis, A.; Chatzi, E.; Straub, D. A framework for quantifying the value of vibration-based structural health monitoring. Mech. Syst. Signal Process. 2023, 184, 109708. [Google Scholar] [CrossRef]
- Erduran, E.; Gonen, S.; Alkanany, A. Parametric analysis of the dynamic response of railway bridges due to vibrations induced by heavy-haul trains. Struct. Infrastruct. Eng. 2022, 1–14. [Google Scholar] [CrossRef]
- Park, Y.S.; Kim, S.; Kim, N.; Lee, J.J. Finite element model updating considering boundary conditions using neural networks. Eng. Struct. 2017, 150, 511–519. [Google Scholar] [CrossRef]
- Gonen, S.; Demirlioglu, K.; Erduran, E. Modal Identification of a Railway Bridge Under Train Crossings: A Comparative Study. In Dynamics of Civil Structures, Volume 2: Proceedings of the 40th IMAC, A Conference and Exposition on Structural Dynamics 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 33–40. [Google Scholar]
- Figueiredo, E.; Omori Yano, M.; Da Silva, S.; Moldovan, I.; Adrian Bud, M. Transfer Learning to Enhance the Damage Detection Performance in Bridges When Using Numerical Models. J. Bridge Eng. 2023, 28, 04022134. [Google Scholar] [CrossRef]
- Salehi, M.; Demirlioglu, K.; Erduran, E. Evaluation of the effect of operational modal analysis algorithms on identified modal parameters of railway bridges. In Proceedings of theIABSE Congress, Ghent—Structural Engineering for Future Societal Needs, Ghent, Belgium, 22–24 September 2021; pp. 22–24. [Google Scholar]
- Gonen, S.; Soyoz, S. Dynamic identification of masonry arch bridges using multiple methodologies. In Special Topics in Structural Dynamics & Experimental Techniques, Volume 5: Proceedings of the 38th IMAC, A Conference and Exposition on Structural Dynamics 2020; Springer: Berlin/Heidelberg, Germany, 2021; pp. 37–47. [Google Scholar]
- Gönen, S.; Soyöz, S. Seismic analysis of a masonry arch bridge using multiple methodologies. Eng. Struct. 2021, 226, 111354. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.; Yau, J. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- He, Y.; Yang, J.P. Using acceleration residual spectrum from single two-axle vehicle at contact points to extract bridge frequencies. Eng. Struct. 2022, 266, 114538. [Google Scholar] [CrossRef]
- Erduran, E.; Pettersen, F.M.; Gonen, S.; Lau, A. Identification of Vibration Frequencies of Railway Bridges from Train-Mounted Sensors Using Wavelet Transformation. Sensors 2023, 23, 1191. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Wang, L.; Xiang, Z. Damage detection by mode shape squares extracted from a passing vehicle. J. Sound Vib. 2012, 331, 291–307. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.; Kong, B. Numerically extracting bridge modal properties from dynamic responses of moving vehicles. J. Eng. Mech. 2016, 142, 04016025. [Google Scholar] [CrossRef]
- González, A.; OBrien, E.J.; McGetrick, P. Identification of damping in a bridge using a moving instrumented vehicle. J. Sound Vib. 2012, 331, 4115–4131. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Zhang, B.; Chen, Y.; Qian, Y.; Wu, Y. Bridge damping identification by vehicle scanning method. Eng. Struct. 2019, 183, 637–645. [Google Scholar] [CrossRef]
- Kildashti, K.; Alamdari, M.M.; Kim, C.; Gao, W.; Samali, B. Drive-by-bridge inspection for damage identification in a cable-stayed bridge: Numerical investigations. Eng. Struct. 2020, 223, 110891. [Google Scholar] [CrossRef]
- Locke, W.; Sybrandt, J.; Redmond, L.; Safro, I.; Atamturktur, S. Using drive-by health monitoring to detect bridge damage considering environmental and operational effects. J. Sound Vib. 2020, 468, 115088. [Google Scholar] [CrossRef]
- Alamdari, M.M.; Chang, K.; Kim, C.; Kildashti, K.; Kalhori, H. Transmissibility performance assessment for drive-by bridge inspection. Eng. Struct. 2021, 242, 112485. [Google Scholar] [CrossRef]
- Zhan, Y.; Au, F.T.; Zhang, J. Bridge identification and damage detection using contact point response difference of moving vehicle. Struct. Control. Health Monit. 2021, 28, e2837. [Google Scholar] [CrossRef]
- Kong, X.; Cai, C.; Deng, L.; Zhang, W. Using dynamic responses of moving vehicles to extract bridge modal properties of a field bridge. J. Bridge Eng. 2017, 22, 04017018. [Google Scholar] [CrossRef]
- Jian, X.; Xia, Y.; Sun, L. An indirect method for bridge mode shapes identification based on wavelet analysis. Struct. Control. Health Monit. 2020, 27, e2630. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhao, H.; Lie, S.T. Estimation of mode shapes of beam-like structures by a moving lumped mass. Eng. Struct. 2019, 180, 654–668. [Google Scholar] [CrossRef]
- Yang, Y.; Lu, H.; Tan, X.; Chai, H.K.; Wang, R.; Zhang, Y. Fundamental mode shape estimation and element stiffness evaluation of girder bridges by using passing tractor-trailers. Mech. Syst. Signal Process. 2022, 169, 108746. [Google Scholar] [CrossRef]
- Oshima, Y.; Yamamoto, K.; Sugiura, K. Damage assessment of a bridge based on mode shapes estimated by responses of passing vehicles. Smart Struct. Syst. 2014, 13, 731–753. [Google Scholar] [CrossRef]
- Malekjafarian, A.; OBrien, E.J. Identification of bridge mode shapes using short time frequency domain decomposition of the responses measured in a passing vehicle. Eng. Struct. 2014, 81, 386–397. [Google Scholar] [CrossRef] [Green Version]
- OBrien, E.J.; Malekjafarian, A. A mode shape-based damage detection approach using laser measurement from a vehicle crossing a simply supported bridge. Struct. Control Health Monit. 2016, 23, 1273–1286. [Google Scholar] [CrossRef]
- Li, J.; Zhu, X.; Law, S.-s.; Samali, B. Indirect bridge modal parameters identification with one stationary and one moving sensors and stochastic subspace identification. J. Sound Vib. 2019, 446, 1–21. [Google Scholar] [CrossRef]
- Mei, Q.; Shirzad-Ghaleroudkhani, N.; Gül, M.; Ghahari, S.F.; Taciroglu, E. Bridge mode shape identification using moving vehicles at traffic speeds through non-parametric sparse matrix completion. Struct. Control Health Monit. 2021, 28, e2747. [Google Scholar] [CrossRef]
- Eshkevari, S.S.; Matarazzo, T.J.; Pakzad, S.N. Bridge modal identification using acceleration measurements within moving vehicles. Mech. Syst. Signal Process. 2020, 141, 106733. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi Eshkevari, S.; Pakzad, S.N.; Takáč, M.; Matarazzo, T.J. Modal identification of bridges using mobile sensors with sparse vibration data. J. Eng. Mech. 2020, 146, 04020011. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Chang, K.C. Constructing the mode shapes of a bridge from a passing vehicle: A theoretical study. Smart Struct. Syst. 2014, 13, 797–819. [Google Scholar] [CrossRef]
- Qi, Z.; Au, F. Identifying mode shapes of girder bridges using dynamic responses extracted from a moving vehicle under impact excitation. Int. J. Struct. Stab. Dyn. 2017, 17, 1750081. [Google Scholar] [CrossRef]
- Tan, C.; Uddin, N.; OBrien, E.J.; McGetrick, P.J.; Kim, C.W. Extraction of bridge modal parameters using passing vehicle response. J. Bridge Eng. 2019, 24, 04019087. [Google Scholar] [CrossRef]
- Tan, C.; Zhao, H.; OBrien, E.J.; Uddin, N.; Fitzgerald, P.C.; McGetrick, P.J.; Kim, C.W. Extracting mode shapes from drive-by measurements to detect global and local damage in bridges. Struct. Infrastruct. Eng. 2021, 17, 1582–1596. [Google Scholar] [CrossRef]
- Yang, D.; Wang, C. Modal properties identification of damped bridge using improved vehicle scanning method. Eng. Struct. 2022, 256, 114060. [Google Scholar] [CrossRef]
- Zhou, J.; Lu, Z.; Zhou, Z.; Pan, C.; Cao, S.; Cheng, J.; Zhang, J. Extraction of bridge mode shapes from the response of a two-axle passing vehicle using a two-peak spectrum idealized filter approach. Mech. Syst. Signal Process. 2023, 190, 110122. [Google Scholar] [CrossRef]
- Malekjafarian, A.; OBrien, E.J. On the use of a passing vehicle for the estimation of bridge mode shapes. J. Sound Vib. 2017, 397, 77–91. [Google Scholar] [CrossRef] [Green Version]
- Yang, Y.; Xu, H.; Wang, Z.L.; Shi, K. Using vehicle–bridge contact spectra and residue to scan bridge’s modal properties with vehicle frequencies and road roughness eliminated. Struct. Control. Health Monit. 2022, 29, e2968. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, B.; Qian, Y.; Wu, Y. Contact-point response for modal identification of bridges by a moving test vehicle. Int. J. Struct. Stab. Dyn. 2018, 18, 1850073. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, H.; Zhang, B.; Xiong, F.; Wang, Z. Measuring bridge frequencies by a test vehicle in non-moving and moving states. Eng. Struct. 2020, 203, 109859. [Google Scholar] [CrossRef]
- Xu, H.; Huang, C.; Wang, Z.; Shi, K.; Wu, Y.; Yang, Y. Damped test vehicle for scanning bridge frequencies: Theory, simulation and experiment. J. Sound Vib. 2021, 506, 116155. [Google Scholar] [CrossRef]
- Yang, Y.; Xiong, F.; Wang, Z.L.; Xu, H. Extraction of Bridge Frequencies Inclusive of the Higher Modes by the ESMD Using the Contact-Point Response. Int. J. Struct. Stab. Dyn. 2020, 2050045. [Google Scholar] [CrossRef]
- Erduran, E.; Nordli, C.; Gonen, S. Effect of Elastomeric Bearing Stiffness on the Dynamic Response of Railway Bridges Considering Vehicle–Bridge Interaction. Appl. Sci. 2022, 12, 11952. [Google Scholar] [CrossRef]
- Yang, Y.B.; Zhang, B.; Wang, T.; Xu, H.; Wu, Y. Two-axle test vehicle for bridges: Theory and applications. Int. J. Mech. Sci. 2019, 152, 51–62. [Google Scholar] [CrossRef]
- Yang, Y.B.; Xu, H.; Mo, X.Q.; Wang, Z.L.; Wu, Y.T. An effective procedure for extracting the first few bridge frequencies from a test vehicle. Acta Mech. 2021, 232, 1227–1251. [Google Scholar] [CrossRef]
- Salehi, M.; Erduran, E. Identification of boundary conditions of railway bridges using artificial neural networks. J. Civ. Struct. Health Monit. 2022. [Google Scholar] [CrossRef]
- Dodds, C.; Robson, J. The description of road surface roughness. J. Sound Vib. 1973, 31, 175–183. [Google Scholar] [CrossRef]
- Vibration, I.M. ISO 8608; Road Surface Profiles–Reporting of Measured Data. International Standards Organisation: Geneve, Swizerland, 2016. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bridge | Mass per length | t/m |
| Young’s modulus | GPa | |
| Moment of inertia | m | |
| Spring coefficient | kN/m | |
| Quarter-car | Mass | t |
| Stiffness coefficient | kN/m | |
| Damping coefficient | kN·s/m | |
| Bounce frequency | Hz | |
| Half-car | Mass | t |
| Mass moment of Inertia | t·m | |
| Stiffness coefficient (front) | kN/m | |
| Stiffness coefficient (rear) | kN/m | |
| Damping coefficient (front) | kN·s/m | |
| Damping coefficient (rear) | kN·s/m | |
| Axle distance to the mass | m | |
| Bounce frequency | Hz | |
| Pitching frequency | Hz | |
| Truck (in traffic) | Mass | t |
| Stiffness coefficient | kN/m | |
| Damping coefficient | kN·s/m | |
| Bounce frequency | Hz |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Demirlioglu, K.; Gonen, S.; Erduran, E. Efficacy of Vehicle Scanning Methods in Estimating the Mode Shapes of Bridges Seated on Elastic Supports. Sensors 2023, 23, 6335. https://doi.org/10.3390/s23146335
Demirlioglu K, Gonen S, Erduran E. Efficacy of Vehicle Scanning Methods in Estimating the Mode Shapes of Bridges Seated on Elastic Supports. Sensors. 2023; 23(14):6335. https://doi.org/10.3390/s23146335
Chicago/Turabian StyleDemirlioglu, Kultigin, Semih Gonen, and Emrah Erduran. 2023. "Efficacy of Vehicle Scanning Methods in Estimating the Mode Shapes of Bridges Seated on Elastic Supports" Sensors 23, no. 14: 6335. https://doi.org/10.3390/s23146335
APA StyleDemirlioglu, K., Gonen, S., & Erduran, E. (2023). Efficacy of Vehicle Scanning Methods in Estimating the Mode Shapes of Bridges Seated on Elastic Supports. Sensors, 23(14), 6335. https://doi.org/10.3390/s23146335