
Attitude Control of Ornithopter Wing by Using a MIMO Active Disturbance Rejection Strategy

 , ,
, ,  , ,
, ,  , , and
, , and
Abstract
:1. Introduction
- Present a detailed extension of the MP-ADRC method for application in MIMO systems;
- Discuss and analyze such extension in the attitude control of an ornithopter wing, which corresponds to a relevant and challenging nonlinear control problem;
- Analyze the results of computational simulation obtained after control implementation, taking into account the detailed dynamic model of the ornithopter wing;
2. Problem Statement
3. Computed Torque Method
4. The ADRC Method Applied to MIMO Dynamical Systems
Standard ADRC Design Methodology
Stability Analysis
- The resultant closed-loop system is BIBO;
- The tracking error entries of vector are uniformly bounded ;
- In a steady-state regime, if .
5. Modified-Plant ADRC (MP-ADRC)
5.1. Proposed Methodology
5.2. ESO Convergence Analysis
5.3. Closed-Loop Stability and Tracking Analysis
- all eigenvalues of and belong to the LHP;
- , , ,
- tends to a residual set that can be reduced by increasing ;
- if tend to a constant value.
6. Application—Attitude Control of an Ornithopter Wing
6.1. System Model
6.2. Control Definition
- For the filter:
- For the auxiliary error:
- For the ESOs:
- (a)
- Subsystem :
- (b)
- Subsystem :
- (c)
- Subsystem :
- For the control laws:
7. Simulation Results
7.1. Simulation 1
7.2. Simulation 2
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ADRC | Active Disturbance Rejection Control |
| BIBO | Bounded Input Bounded Output |
| ESO | Extended State Observer |
| LHP | Left Half-Plane (Complex) |
| LQI | Linear Quadratic Integrator |
| LQR | Linear Quadratic Regulator |
| MIMO | Multiple-Input Multiple-Output |
| MP-ADRC | Modified-Plant Active Disturbance Rejection Control |
| MPC | Model Predictive Control |
| PD | Proportional-Derivative |
| PID | Proportional-Integral-Derivative |
| SISO | Single-Input Single-Output |
| SMC | Sliding-Mode Control |
| VS-MRAC | Variable Structure Model Reference Adaptive Control |
Appendix A. System’s Dynamical Parameters
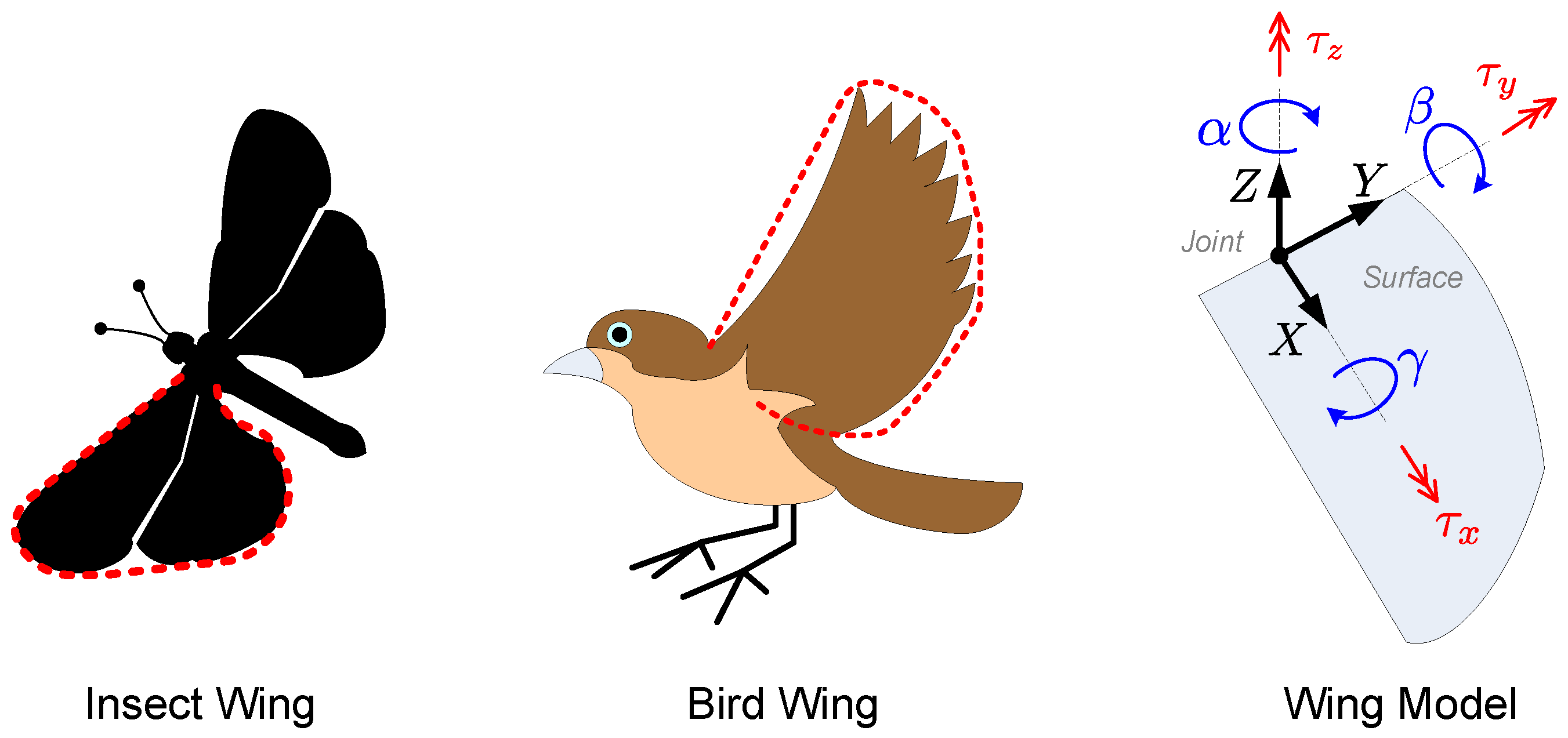
- are the joints’ rotation angles around the Z, Y, and X axes, respectively (Euler angles);
- is the vector of actuator torques at the three wing joints;
- is a symmetric positive definite inertia matrix with entries (i rows and j columns) described by
- is the Coriolis matrix with entries
- includes gravity terms and other forces which act at the joints;
- is the vector of aerodynamic forces, being
- is the wind velocity vector with components , , on the axes.
References
- Fearing, R.S.; Chiang, K.H.; Dickinson, M.H.; Pick, D.; Sitti, M.; Yan, J. Wing transmission for a micromechanical flying insect. In Proceedings of the 2000 ICRA, Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 1509–1516. [Google Scholar]
- Deng, X.; Schenato, L.; Wu, W.C.; Sastry, S.S. Flapping flight for biomimetic robotic insects: Part I-system modeling. IEEE Trans. Robot. 2006, 22, 776–788. [Google Scholar] [CrossRef]
- Deng, X.; Schenato, L.; Sastry, S.S. Flapping flight for biomimetic robotic insects: Part II-flight control design. IEEE Trans. Robot. 2006, 22, 789–803. [Google Scholar] [CrossRef]
- Khan, Z.A.; Agrawal, S.K. Design and optimization of a biologically inspired flapping mechanism for flapping wing micro air vehicles. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 373–378. [Google Scholar]
- Cheng, B.; Deng, X. Translational and rotational damping of flapping flight and its dynamics and stability at hovering. IEEE Trans. Robot. 2011, 27, 849–864. [Google Scholar] [CrossRef]
- Rose, C.J.; Mahmoudieh, P.; Fearing, R.S. Modeling and control of an ornithopter for diving. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; pp. 957–964. [Google Scholar]
- Bogado Martínez, C.F.; Dutra, M.S.; Raptopoulos, L.S.C. Proposed control for wing movement, type flat plate, for ornithopter autonomous robot. J. Braz. Soc. Mech. Sci. Eng. 2018, 40, 456. [Google Scholar] [CrossRef]
- Díaz, E.Y.V.; Bogado-Martínez, C.F.; Dutra, A.S.; Raptopoulos, L.S.C. Control of a Wing Type Flat-Plate for an Ornithopter Autonomous Robot With Differential Flatness. In Advanced Mechatronic Systems and Intelligent Robotics; IGI Global: Hershey, PA, USA, 2020; pp. 209–245. [Google Scholar]
- Shan, X.; Bilgen, O. A reduced-order multi-body model with electromechanical-aeroelastic coupling for mechanism-free ornithopters. J. Fluids Struct. 2022, 114, 103724. [Google Scholar] [CrossRef]
- Chen, Y.; Arase, C.; Ren, Z.; Chirarattananon, P. Design, Characterization, and Liftoff of an Insect-Scale Soft Robotic Dragonfly Powered by Dielectric Elastomer Actuators. Micromachines 2022, 13, 1136. [Google Scholar] [CrossRef]
- Ruiz, C.; Acosta, J.; Ollero, A. Aerodynamic reduced-order Volterra model of an ornithopter under high-amplitude flapping. Aerosp. Sci. Technol. 2022, 121, 107331. [Google Scholar] [CrossRef]
- Chen, C.L.P.; Wen, G.; Lui, Y.; Liu, Z. Observer-Based Adaptive Backstepping Consensus Tracking Control for High-Order Nonlinear Semi-Strict-Feedback Multiagent Systems. IEEE Trans. Cybern. 2015, 46, 1591–1601. [Google Scholar] [CrossRef]
- Selfridge, J.M.; Tao, G. Multivariable Output Feedback MRAC for a Quadrotor UAV. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016; pp. 492–499. [Google Scholar]
- Hsu, L.; Oliveira, T.R.; Cunha, J.V.S. Extremum seeking control via monitoring function and time-scaling for plants of arbitrary relative degree. In Proceedings of the International Workshop on Variable Structure Systems, Nantes, France, 29 June–2 July 2014. [Google Scholar]
- Li, H.; Wang, J.; Lam, H.; Zhou, Q.; Du, H. Adaptive Sliding Mode Control for Interval Type-2 Fuzzy Systems. IEEE Trans. Syst. Man Cybern. Syst. 2016, 46, 1654–1663. [Google Scholar] [CrossRef]
- Mobayen, S. Design of LMI-Based Sliding Mode Controller with an Exponential Policy for a Class of Underactuated Systems. Complexity 2014, 21, 117–124. [Google Scholar] [CrossRef]
- Mobayen, S.; Tchier, F. An LMI approach to adaptive robust tracker design for uncertain nonlinear systems with time-delays and input nonlinearities. Nonlinear Dyn. 2016, 85, 1965–1978. [Google Scholar] [CrossRef]
- Mobayen, S.; Tchier, F. Design of an adaptive chattering avoidance global sliding mode tracker for uncertain non-linear time-varying systems. Trans. Inst. Meas. Control 2017, 39, 1547–1558. [Google Scholar] [CrossRef]
- Han, J. Auto-disturbance rejection control and its applications. Control Decis. 1998, 13, 19–23. [Google Scholar]
- Han, J. From PID to active disturbance rejection control. IEEE Trans. Ind. Electron. 2009, 56, 900–906. [Google Scholar] [CrossRef]
- Madoński, R.; Gao, Z.; Łakomy, K. Towards a turnkey solution of industrial control under the active disturbance rejection paradigm. In Proceedings of the 54th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Hangzhou, China, 28–30 July 2015; pp. 616–621. [Google Scholar]
- Xue, W.; Bai, W.; Yang, S.; Song, K.; Huang, Y.; Xie, H. ADRC with adaptive extended state observer and its application to air-fuel ratio control in gasoline engines. IEEE Trans. Ind. Electron. 2015, 62, 5847–5857. [Google Scholar] [CrossRef]
- Zheng, Q.; Chen, Z.; Gao, Z. A practical approach to disturbance decoupling control. Control Eng. Pract. 2009, 17, 1016–1025. [Google Scholar] [CrossRef] [Green Version]
- Zhang, D.; Yao, X.; Wu, Q. Parameter tuning of modified active disturbance rejection control based on the particle swarm optimization algorithm for high-order system. In Proceedings of the IEEE International Conference on Aircraft Utility Systems (AUS), Beijing, China, 10–12 October 2016; pp. 290–294. [Google Scholar]
- Sun, L.; Li, D.; Gao, Z.; Yang, Z.; Zhao, S. Combined feedforward and model-assisted active disturbance rejection control for non-minimum phase system. ISA Trans. 2016, 64, 24–33. [Google Scholar] [CrossRef] [PubMed]
- Xia, Y.; Pu, F.; Li, S.; Gao, Y. Lateral path tracking control of autonomous land vehicle based on ADRC and differential flatness. IEEE Trans. Ind. Electron. 2016, 63, 3091–3099. [Google Scholar] [CrossRef]
- Garran, P.T.; Garcia, G. Design of an Optimal PID Controller for a Coupled Tanks System employing ADRC. IEEE Lat. Am. Trans. 2017, 15, 189–196. [Google Scholar] [CrossRef]
- Guo, B.; Bacha, S.; Alamir, M. A review on ADRC based PMSM control designs. In Proceedings of the IECON 2017-43rd Annual Conference of the IEEE Industrial Electronics Society, Beijing, China, 29 October–1 November 2017; pp. 1747–1753. [Google Scholar]
- Xia, A.; Hu, G.; Li, Z.; Huang, D.; Wang, F. Self-optimizing Pitch Control for Large Scale Wind Turbine Based on ADRC. In Proceedings of the IOP Conference Series: Materials Science and Engineering; IOP Publishing: Xiamen, China, 2018; Volume 301, pp. 1–8. [Google Scholar]
- Wu, Z.H.; Guo, B.Z. Extended state observer for MIMO nonlinear systems with stochastic uncertainties. Int. J. Control 2020, 93, 424–436. [Google Scholar] [CrossRef]
- Sun, H.; Sun, Q.; Wu, W.; Chen, Z.; Tao, J. Altitude control for flexible wing unmanned aerial vehicle based on active disturbance rejection control and feedforward compensation. Int. J. Robust Nonlinear Control 2020, 30, 222–245. [Google Scholar] [CrossRef]
- Fossen, T.I. Guidance and Control of Ocean Vehicles; John Wiley: Hoboken, NJ, USA, 1994. [Google Scholar]
- Popp, K.; Schiehlen, W. Ground Vehicle Dynamics; Springer: Berlin/Heidelberg, Germany, 2010. [Google Scholar]
- Zachi, A.R.; Correia, C.A.M.; Filho, J.L.A.; Gouvea, J.A. Robust disturbance rejection controller for systems with uncertain parameters. IET Control Theory Appl. 2019, 13, 1995–2007. [Google Scholar] [CrossRef]
- Song, X.; Li, L.; Xue, W.; Song, K.; Xin, B. Active disturbance rejection decoupling control for nonlinear MIMO uncertain systems with application to path following of self-driving bus. Control Eng. Pract. 2023, 133, 105432. [Google Scholar] [CrossRef]
- Cao, Y.; Cao, Z.; Feng, F.; Xie, L. ADRC-Based Trajectory Tracking Control for a Planar Continuum Robot. J. Intell. Robot. Syst. 2023, 108, 1. [Google Scholar] [CrossRef]
- Torres, J.Z.; Davila, J.; Lozano, R. Attitude and altitude control on board of an ornithopter. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 1124–1130. [Google Scholar]
- Zhao, N.; Zhang, J.; Zhang, Y.; Jiang, X.; Shen, Y.; Yang, S.; Hu, S. A Self-Balanced Vehicle Base for Takeoff of a Flapping-Wing Robot. In Proceedings of the 2022 International Conference on Advanced Robotics and Mechatronics (ICARM), Guilin, China, 9–11 July 2022; pp. 593–598. [Google Scholar]
- Chrif, L.; Kadda, Z.M. Aircraft control system using LQG and LQR controller with optimal estimation-Kalman filter design. Procedia Eng. 2014, 80, 245–257. [Google Scholar] [CrossRef] [Green Version]
- Ogunwa, T.; Abdullah, E.; Chahl, J. Modeling and Control of an Articulated Multibody Aircraft. Appl. Sci. 2022, 12, 1162. [Google Scholar] [CrossRef]
- Bhattacharjee, D.; Subbarao, K. Robust control strategy for quadcopters using sliding mode control and model predictive control. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 2071. [Google Scholar]
- Liang, S.; Song, B.; Xuan, J. Active disturbance rejection attitude control for a bird-like flapping wing micro air vehicle during automatic landing. IEEE Access 2020, 8, 171359–171372. [Google Scholar] [CrossRef]
- Liang, S.; Song, B.; Xuan, J.; Li, Y. Active disturbance rejection attitude control for the dove flapping wing micro air vehicle in intermittent flapping and gliding flight. Int. J. Micro Air Veh. 2020, 12, 1756829320943085. [Google Scholar] [CrossRef]
- Feliu-Talegon, D.; Rafee Nekoo, S.; Suarez, A.; Acosta, J.A.; Ollero, A. Modeling and Under-actuated Control of Stabilization Before Take-off Phase for Flapping-wing Robots. In Proceedings of the ROBOT2022: Fifth Iberian Robotics Conference: Advances in Robotics; Springer: Berlin/Heidelberg, Germany, 2022; Volume 2, pp. 376–388. [Google Scholar]
- Maldonado, F.J.; Acosta, J.Á.; Tormo-Barbero, J.; Grau, P.; Guzmán, M.; Ollero, A. Adaptive nonlinear control for perching of a bioinspired ornithopter. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2021; pp. 1385–1390. [Google Scholar]
- Leyci, S.; Poshtan, J. Altitude cascade control of an avian-like flapping robot considering articulated wings and quasi-steady. Amirkabir J. Mech. Eng. 2021, 53, 511–514. [Google Scholar] [CrossRef]
- Murray, R.M.; Li, Z.; Sastry, S.S. A Mathematical Introduction to Robotic Manipulation; CRC Press: Boca Raton, FL, USA, 1994; Volume I. [Google Scholar]
- Gao, Z.; Huang, Y.; Han, J. An alternative paradigm for control system design. In Proceedings of the 40th IEEE Conference on Decision and Control, Orlando, FL, USA, 4–7 December 2001; Volume 5, pp. 4578–4585. [Google Scholar]
- Zheng, Q.; Dong, L.; Lee, D.H.; Gao, Z. Active disturbance rejection control for MEMS gyroscopes. In Proceedings of the American Control Conference, Seattle, WA, USA, 11–13 June 2008; pp. 4425–4430. [Google Scholar]
- Ding, W.; Wei, Y. Generalized tensor eigenvalue problems. SIAM J. Matrix Anal. Appl. 2015, 36, 1073–1099. [Google Scholar] [CrossRef]
- Gouvêa, J.A.; Fernandes, L.M.; Pinto, M.F.; Zachi, A.R. Variant ADRC design paradigm for controlling uncertain dynamical systems. Eur. J. Control 2023, 72, 100822. [Google Scholar] [CrossRef]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wing Span () | Ornithopter Mass () | Wing Mass | Wing Chord () | |
|---|---|---|---|---|
| Simulation 1 | m | kg | kg | m |
| Simulation 2 | m | kg | kg | m |
| MP-ADRC | Computed Torque (Augmented PD) | |||
|---|---|---|---|---|
| Filter poles, p | ESO poles, | Output gain, | ||
| 80 | 5000 | 4096 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gouvêa, J.A.; Raptopoulos, L.S.C.; Pinto, M.F.; Díaz, E.Y.V.; Dutra, M.S.; Sousa, L.C.d.; Batista, V.M.O.; Zachi, A.R.L. Attitude Control of Ornithopter Wing by Using a MIMO Active Disturbance Rejection Strategy. Sensors 2023, 23, 6602. https://doi.org/10.3390/s23146602
Gouvêa JA, Raptopoulos LSC, Pinto MF, Díaz EYV, Dutra MS, Sousa LCd, Batista VMO, Zachi ARL. Attitude Control of Ornithopter Wing by Using a MIMO Active Disturbance Rejection Strategy. Sensors. 2023; 23(14):6602. https://doi.org/10.3390/s23146602
Chicago/Turabian StyleGouvêa, Josiel Alves, Luciano Santos Constantin Raptopoulos, Milena Faria Pinto, Elkin Yesid Veslin Díaz, Max Suell Dutra, Lucas Costa de Sousa, Victor Manuel Oliveira Batista, and Alessandro Rosa Lopes Zachi. 2023. "Attitude Control of Ornithopter Wing by Using a MIMO Active Disturbance Rejection Strategy" Sensors 23, no. 14: 6602. https://doi.org/10.3390/s23146602