
Frequency-Domain Reverse-Time Migration with Analytic Green’s Function for the Seismic Imaging of Shallow Water Column Structures in the Arctic Ocean

Abstract
:1. Introduction
2. Materials and Methods
2.1. Conventional Virtual Source Imaging Conditions for Frequency-Domain RTM
2.2. Green’s Function Application
2.3. Source Deconvolution Application
3. Results and Discussion
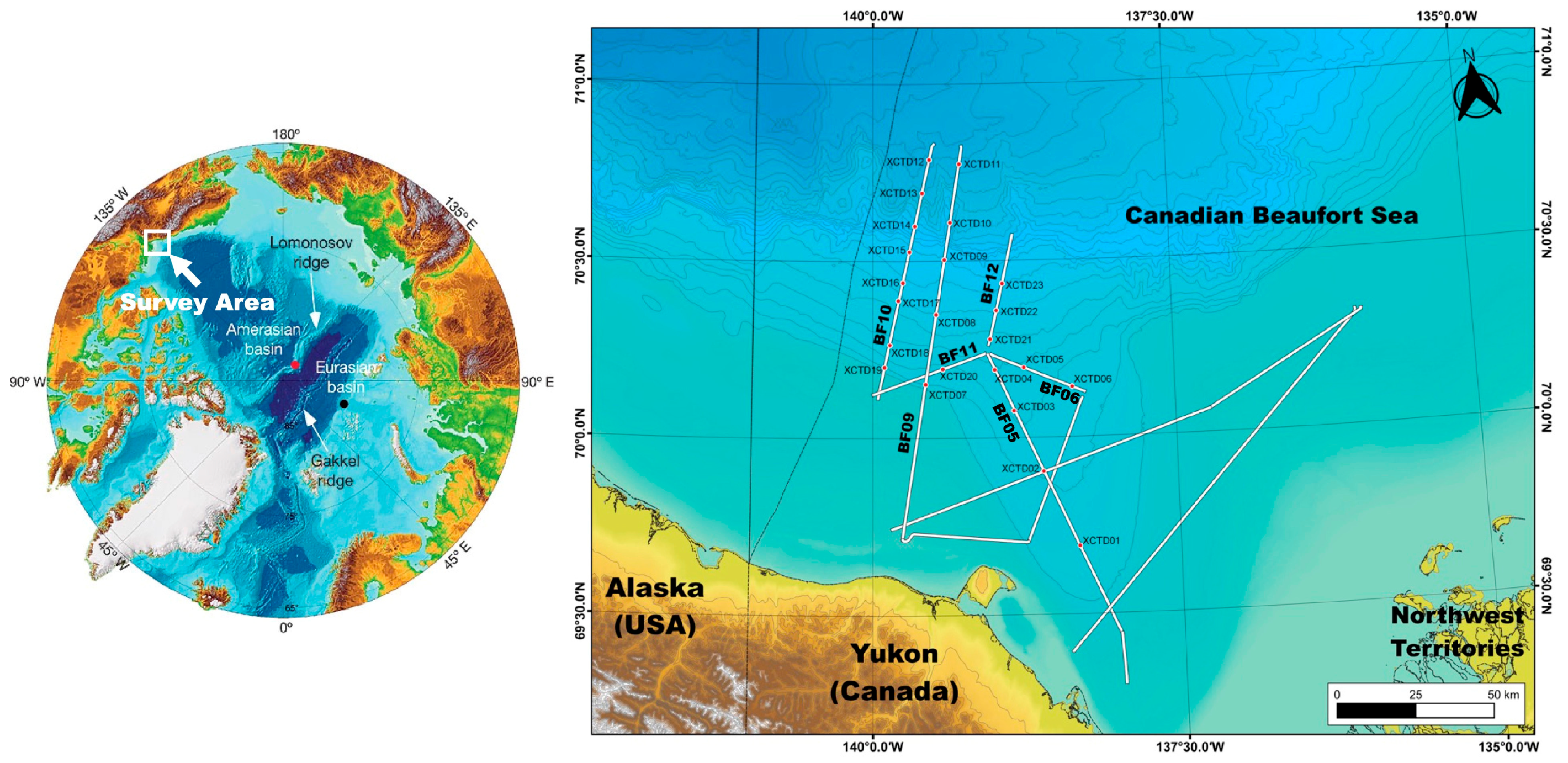
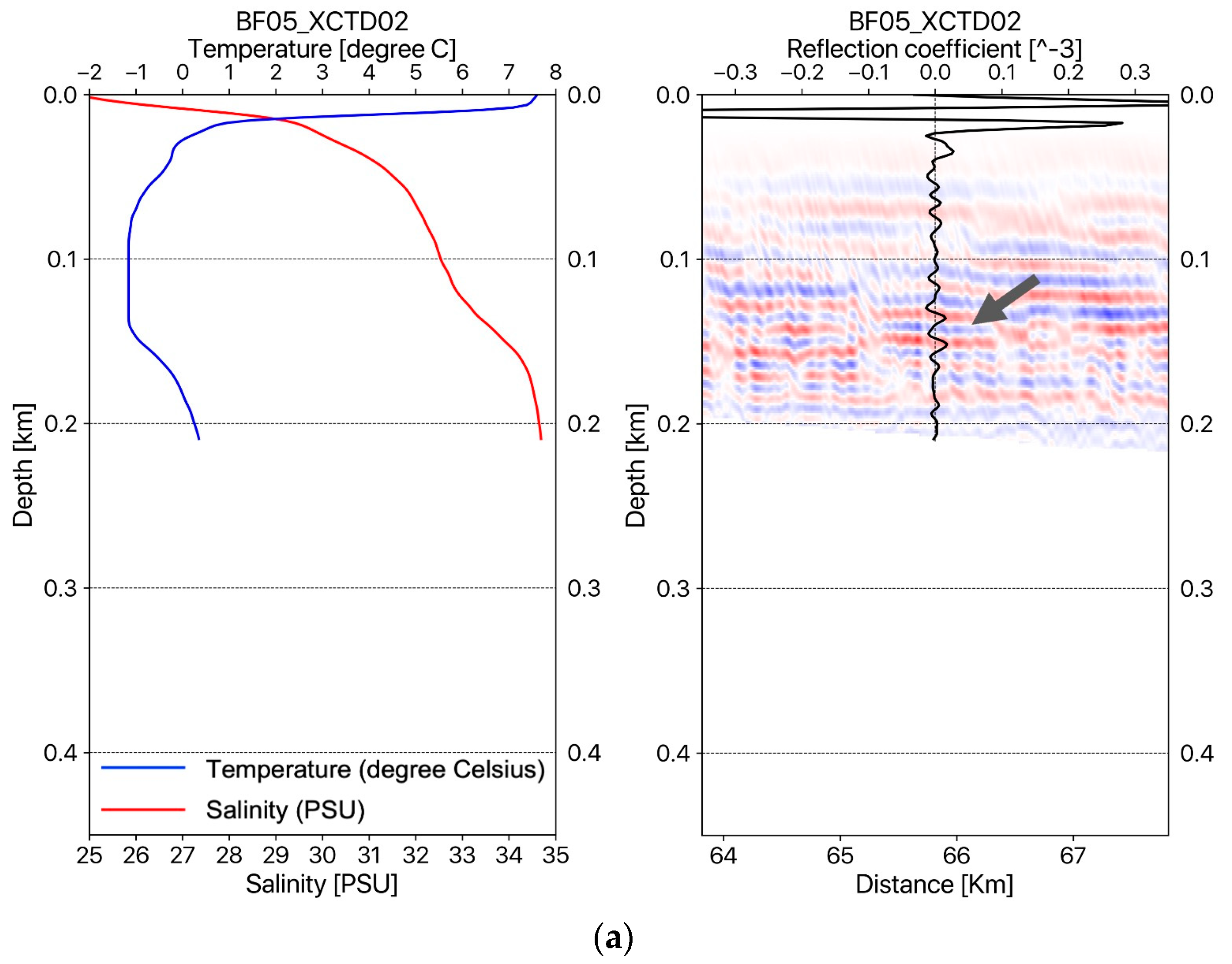
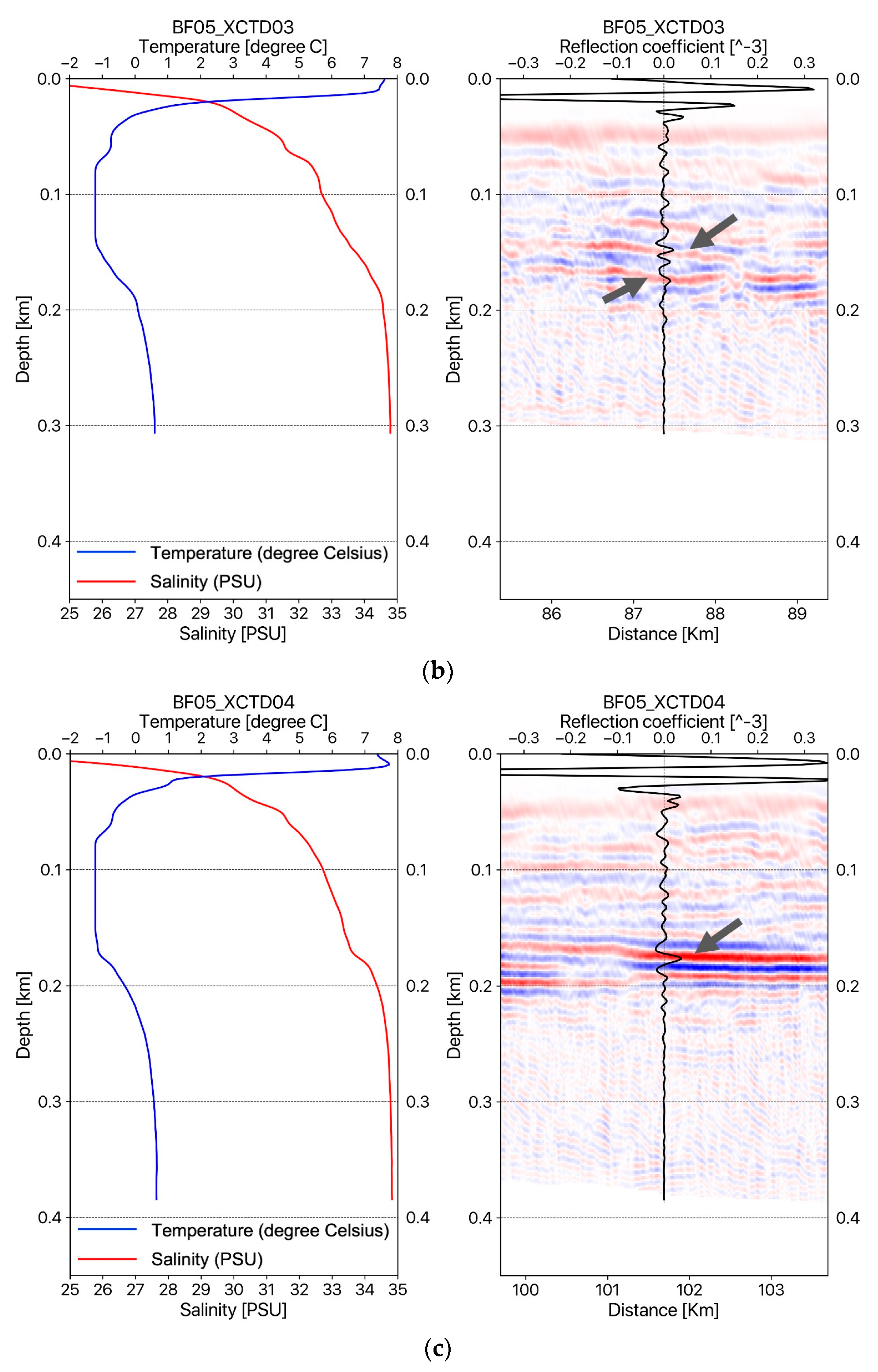
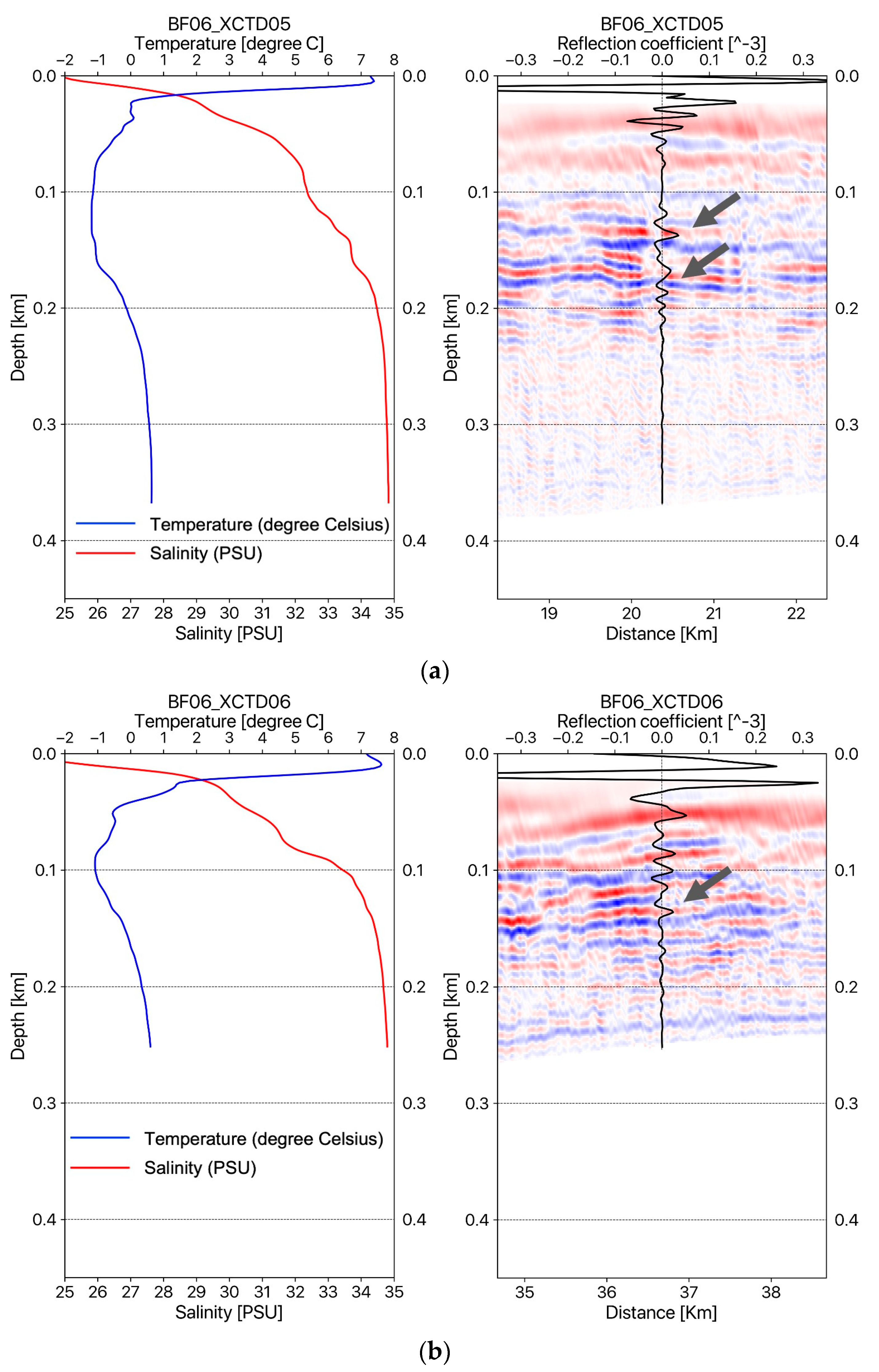
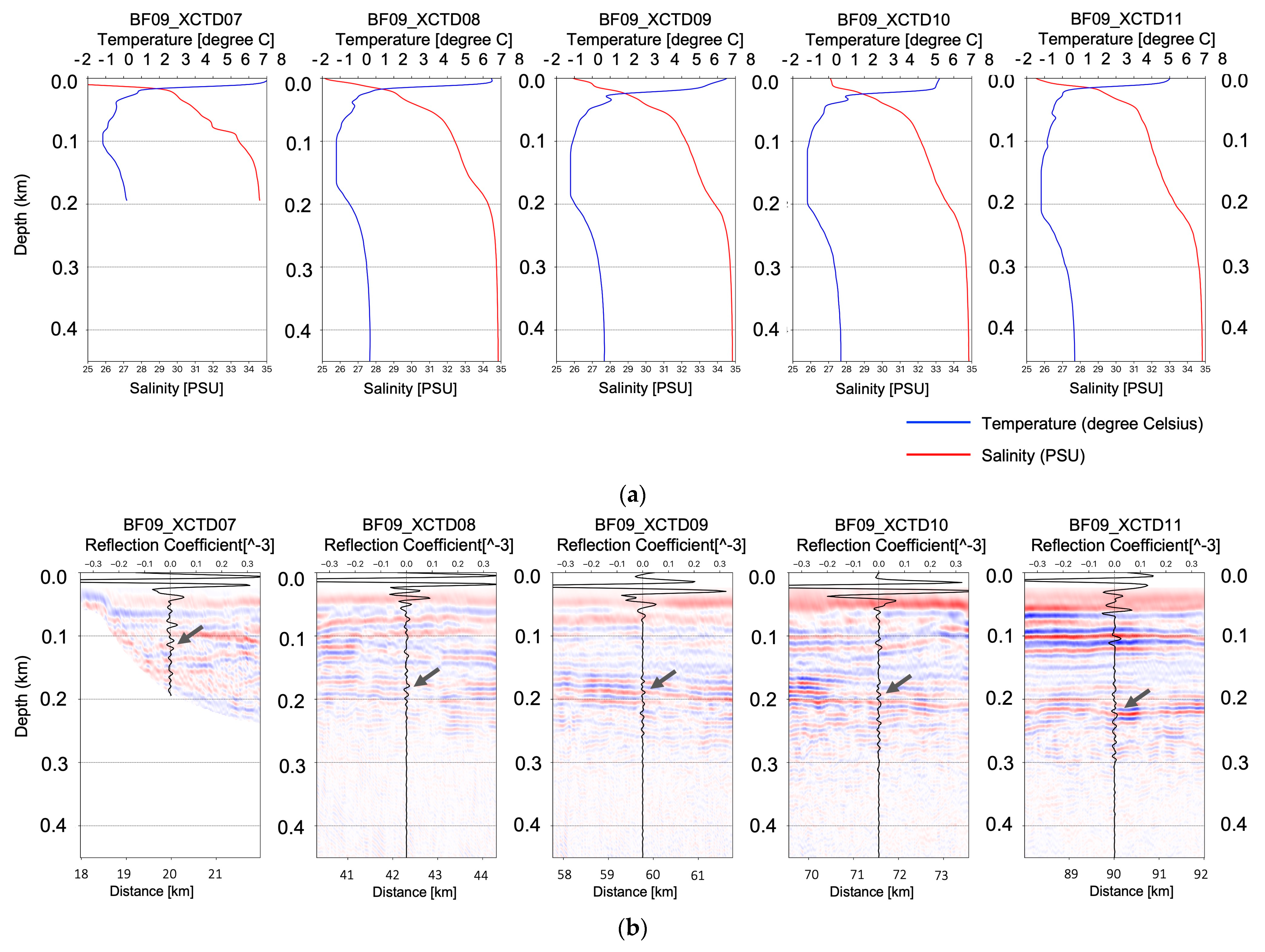
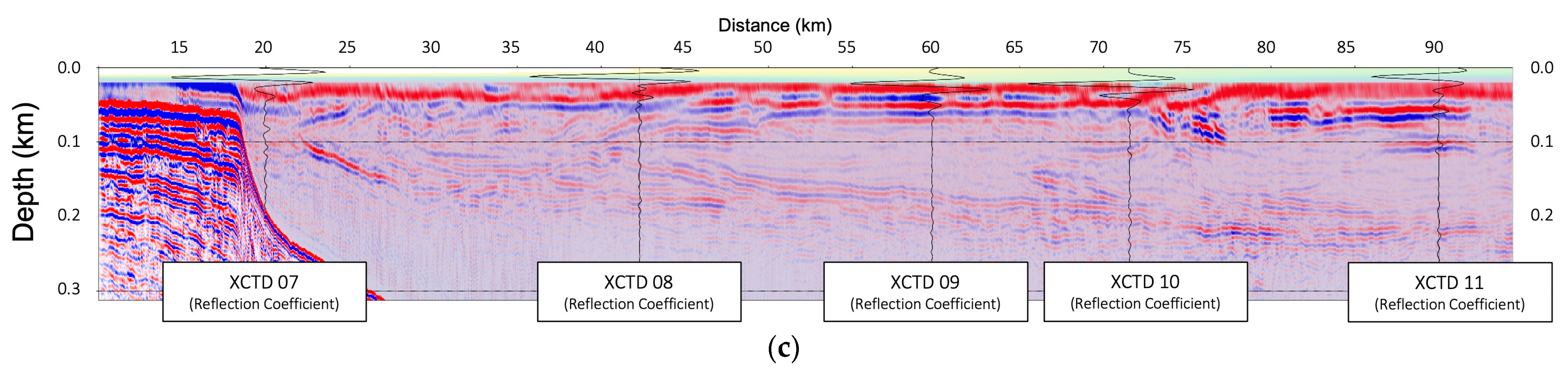
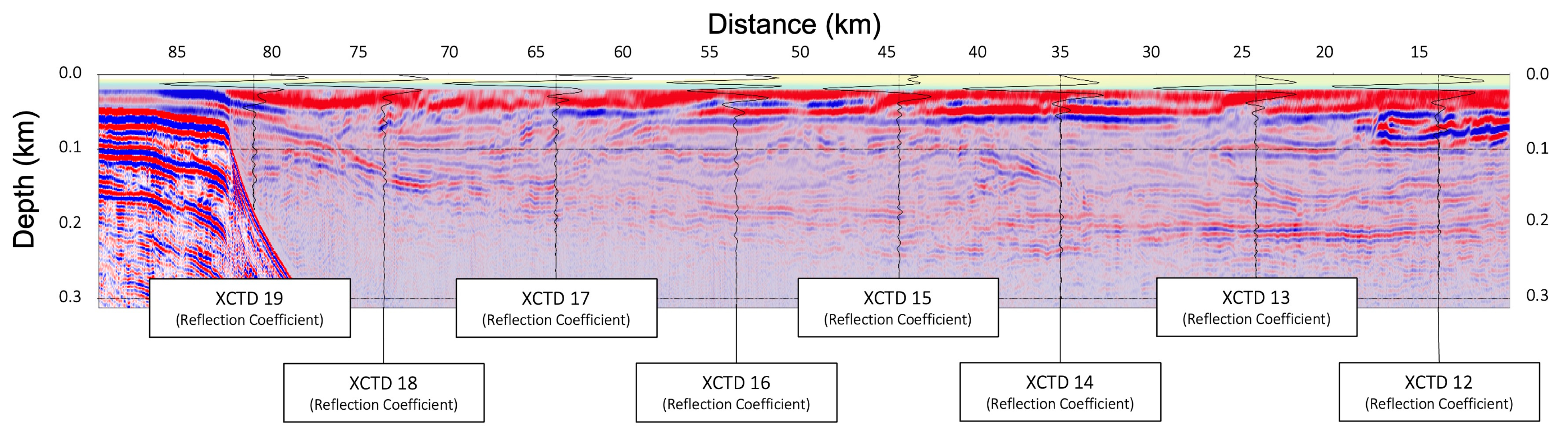
3.1. Description of the Dataset (Multichannel Seismic Data and XCTD Profiles)
3.2. Numerical Test
4. Discussion
4.1. The Reason Why We Cannot Compare with Conventional Modeling-Based RTM Method
4.2. The Reason Why We Cannot Compare with Conventional Seismic Data Processing Result
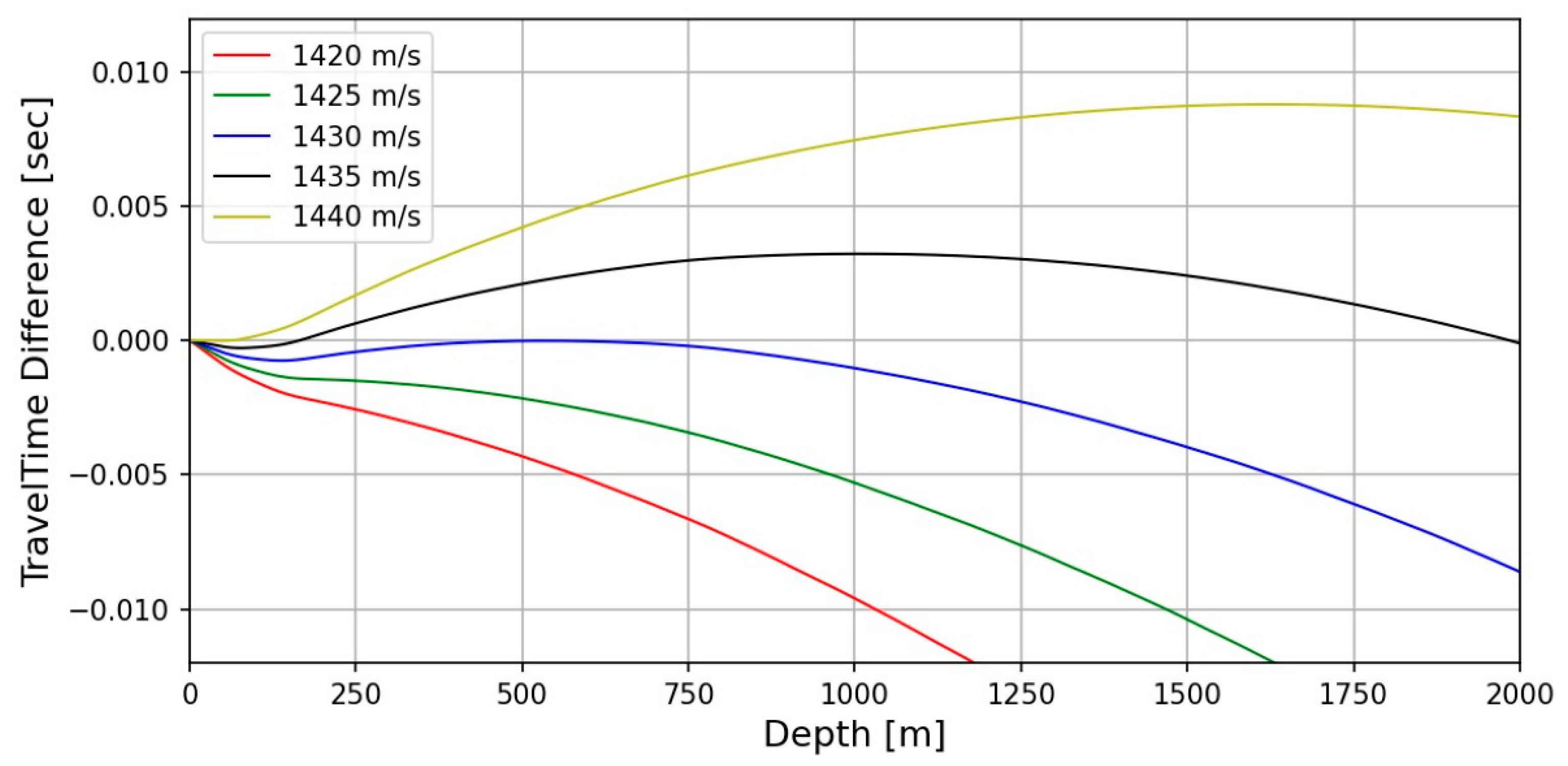
4.3. Discussion about Assuming the Constant P-Wave Velocity and Density of the Water Column for Oceanographic Seismic Imaging by the Analytic Green’s Function
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Holbrook, W.S.; Paramo, P.; Pearse, S.; Schmitt, R.W. Thermohaline fine structure in an oceanographic front from seismic reflection profiling. Science 2003, 301, 821–824. [Google Scholar] [CrossRef] [PubMed]
- Nandi, P.; Holbrook, W.S.; Pearse, S.; Paramo, P.; Schmitt, R.W. Seismic reflection imaging of water mass boundaries in the Norwegian sea. Geophys. Res. Lett. 2004, 31. [Google Scholar] [CrossRef] [Green Version]
- Smillie, M.W. Seismic Oceanographical Imaging of the Ocean SE of NZ; University of Otago: Dunedin, New Zealand, 2012. [Google Scholar]
- Paramo, P.; Holbrook, W.S. Temperature contrasts in the water column inferred from amplitude-versus-offset analysis of acoustic reflections. Geophys. Res. Lett. 2005, 32. [Google Scholar] [CrossRef] [Green Version]
- Jones, I.F. Tutorial: Migration imaging conditions. First Break 2014, 32, 45–55. [Google Scholar] [CrossRef]
- Kim, Y.; Min, D.-J.; Shin, C. Frequency-domain reverse-time migration with source estimation. Geophysics 2011, 76, S41–S49. [Google Scholar] [CrossRef]
- Gupta, A.; Karypis, G.; Kumar, V. Highly scalable parallel algorithms for sparse matrix factorization. IEEE Trans. Parallel Distrib. Syst. 1997, 8, 502–520. [Google Scholar] [CrossRef] [Green Version]
- Shin, C.; Yoon, K.; Marfurt, K.J.; Park, K.; Yang, D.; Lim, H.Y.; Chung, S.; Shin, C. Efficient calculation of a partial-derivative wavefield using reciprocity for seismic imaging and inversion. Geophysics 2001, 66, 1856–1863. [Google Scholar] [CrossRef]
- Jensen, F.B.; Kuperman, W.A.; Porter, M.B.; Schmidt, H. Computational Ocean Acoustics; Springer: New York, NY, USA, 2011. [Google Scholar]
- Virieux, J.; Operto, S.; Ben-Hadj-Ali, H.; Brossier, R.; Etienne, V.; Sourbier, F.; Giraud, L.; Haidar, A. Seismic wave modeling for seismic imaging. Lead. Edge 2009, 28, 538–544. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Babuska, I.; Bouillard, P. Dispersion and pollution of the FEM solution for the Helmholtz equation in one, two and three dimensions. Int. J. Numer. Methods Eng. 1999, 46, 471–499. [Google Scholar] [CrossRef]
- Ziolkowski, A. Why don’t we measure seismic signatures? Geophysics 1991, 56, 190–201. [Google Scholar] [CrossRef]
- Koo, N.-H.; Shin, C.; Min, D.-J.; Park, K.-P.; Lee, H.-Y. Source estimation and direct wave reconstruction in laplace-domain waveform inversion for deep-sea seismic data. Geophys. J. Int. 2011, 187, 861–870. [Google Scholar] [CrossRef] [Green Version]
- Jin, Y.K.; Shipboard Scientific Party. ARA08C Cruise Report: 2017 Korea-Canada-USA Beaufort Sea Research Program; Korea Polar Research Institute: Incheon, Republic of Korea, 2018. [Google Scholar]
- Harris, F.J. On the use of windows for harmonic analysis with the discrete fourier transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Woodgate, R. Arctic Ocean Circulation: Going Around At the Top Of the World. Nat. Educ. Knowl. 2013, 4, 8. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Acquisition Parameters | Values |
|---|---|
| Source | Two G.I. guns (210 cubic inches in total) |
| Shot interval | 25 m |
| Group interval | 12.5 m |
| Channel number | 120 |
| Minimum offset | 85 m |
| Source & receiver depth | 6 m |
| Sampling rate | 1 ms |
| Total recording length | 8 s |
| Station | Date | Time (UTC) | Longitude | Latitude | Depth |
|---|---|---|---|---|---|
| XCTD01 | 2 September 2017 | 4:07 | 138°19.3009′ W | 69°41.5032′ N | 148 m |
| XCTD02 | 2 September 2017 | 7:28 | 138°36.0697′ W | 69°54.2250′ N | 222 m |
| XCTD03 | 2 September 2017 | 10:07 | 138°50.1197′ W | 70°04.5547′ N | 316 m |
| XCTD04 | 2 September 2017 | 11:48 | 138°59.3782′ W | 70°11.5034′ N | 388 m |
| XCTD05 | 2 September 2017 | 14:05 | 138°44.9444′ W | 70°11.8406′ N | 383 m |
| XCTD06 | 2 September 2017 | 16:01 | 138°21.0126′ W | 70°08.4472′ N | 255 m |
| XCTD07 | 3 September 2017 | 9:46 | 139°33.7904′ W | 70°09.1087′ N | 202 m |
| XCTD08 | 3 September 2017 | 12:33 | 139°28.2543′ W | 70°20.9371′ N | 607 m |
| XCTD09 | 3 September 2017 | 14:50 | 139°23.8467′ W | 70°30.2425′ N | 785 m |
| XCTD10 | 3 September 2017 | 16:13 | 139°20.8336′ W | 70°36.4878′ N | 1250 m |
| XCTD11 | 3 September 2017 | 18:24 | 139°15.9515′ W | 70°46.4286′ N | 1741 m |
| XCTD12 | 3 September 2017 | 20:47 | 139°31.1775′ W | 70°47.1764′ N | 1805 m |
| XCTD13 | 3 September 2017 | 23:15 | 139°34.8686′ W | 70°41.5127′ N | 1705 m |
| XCTD14 | 3 September 2017 | 23:23 | 139°38.6842′ W | 70°35.9066′ N | 1233 m |
| XCTD15 | 4 September 2017 | 0:28 | 139°41.4555′ W | 70°31.5702′ N | 782 m |
| XCTD16 | 4 September 2017 | 1:34 | 139°44.9153′ W | 70°26.3360′ N | 671 m |
| XCTD17 | 4 September 2017 | 2:51 | 139°47.2517′ W | 70°23.3024′ N | 480 m |
| XCTD18 | 4 September 2017 | 4:05 | 139°51.5278′ W | 70°15.8214′ N | 375 m |
| XCTD19 | 4 September 2017 | 4:58 | 139°54.1667′ W | 70°12.0187′ N | 188 m |
| XCTD20 | 4 September 2017 | 9:29 | 139°25.1632′ W | 70°11.6801′ N | 280 m |
| XCTD21 | 4 September 2017 | 11:47 | 139°01.4251′ W | 70°16.7027′ N | 470 m |
| XCTD22 | 4 September 2017 | 12:53 | 138°58.1071′ W | 70°21.5499′ N | 607 m |
| XCTD23 | 4 September 2017 | 13:58 | 138°55.0283′ W | 70°26.1055′ N | 720 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, S.-G.; Jang, U.G. Frequency-Domain Reverse-Time Migration with Analytic Green’s Function for the Seismic Imaging of Shallow Water Column Structures in the Arctic Ocean. Sensors 2023, 23, 6622. https://doi.org/10.3390/s23146622
Kang S-G, Jang UG. Frequency-Domain Reverse-Time Migration with Analytic Green’s Function for the Seismic Imaging of Shallow Water Column Structures in the Arctic Ocean. Sensors. 2023; 23(14):6622. https://doi.org/10.3390/s23146622
Chicago/Turabian StyleKang, Seung-Goo, and U Geun Jang. 2023. "Frequency-Domain Reverse-Time Migration with Analytic Green’s Function for the Seismic Imaging of Shallow Water Column Structures in the Arctic Ocean" Sensors 23, no. 14: 6622. https://doi.org/10.3390/s23146622