
Design and Verification of Deep Submergence Rescue Vehicle Motion Control System
 and
and
Abstract
:1. Introduction
2. DSRV Platform
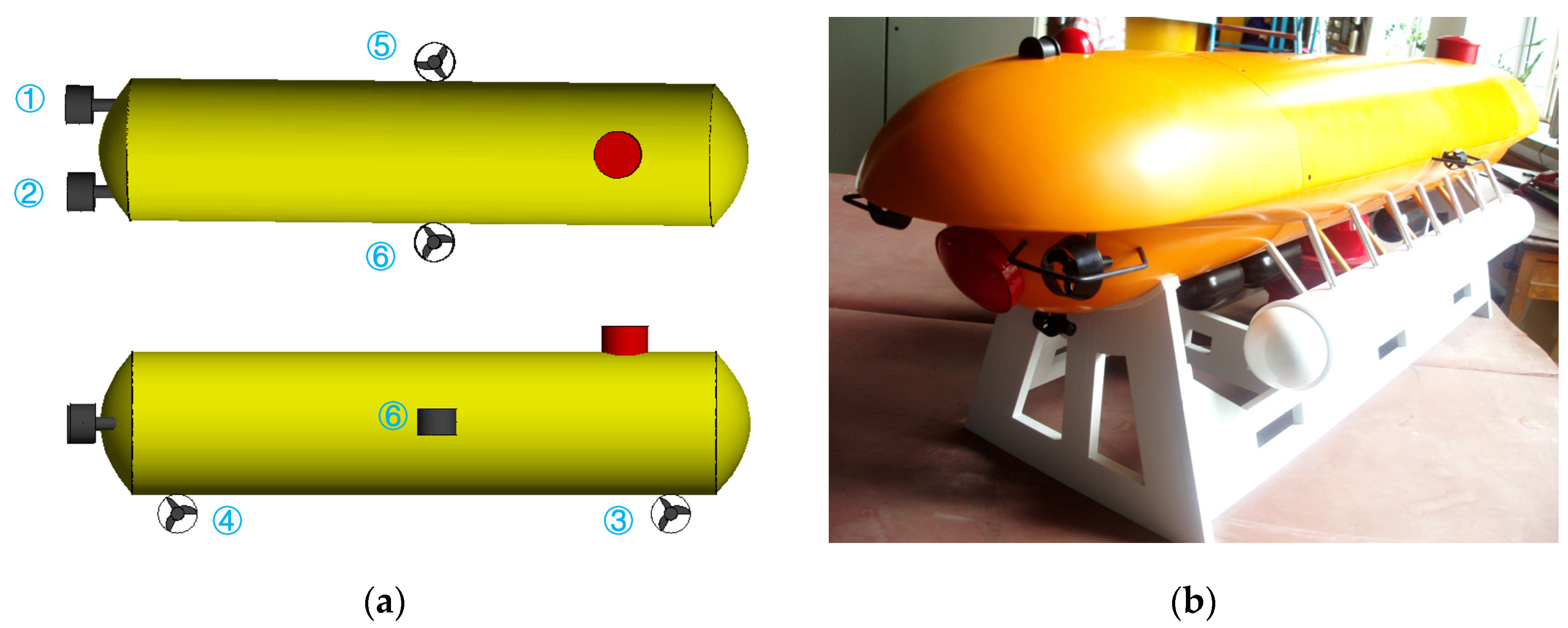
2.1. Platform Framework
2.2. Hardware Architecture
2.3. Software Architecture
3. Control System Design
3.1. Sparse Filtering Method
3.1.1. DVL Data in Sparse Representation
3.1.2. Filtering Model
3.1.3. Simulation Experiments of Data Filtering
3.1.4. Data Filtering of Sea Trials
3.2. Classic S-Plane Control Algorithm
3.3. Improved S-Plane Control Algorithm
3.4. Thrust Allocation Strategy
3.4.1. Thrust Allocation Strategy for Control without Inclination
3.4.2. Thrust Allocation Strategy for Control with Inclination
3.5. Inclination Calculation
4. Numerical Simulations and Analysis
5. Results and Analysis of Pool Experiment
6. Results and Analysis of Sea Trials
6.1. Motion Control
6.2. Long-Distance Navigation
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Abbreviation | Explanation |
| DSRV | Deep Submergence Rescue Vehicle |
| DOF | Degree-of-Freedom |
| AUV | Autonomous Underwater Vehicle |
| PID | Proportional Integral Derivative |
| PD | Proportional Derivative |
| CPU | Central Processing Unit |
| DIO | Digital Input and Output |
| FOG | Fiber-Optic Gyroscope |
| DVL | Doppler Velocity Log |
| UDP | User Datagram Protocol |
| TCP | Transmission Control Protocol |
| K-SVD | K-Singular Value Decomposition |
References
- Oh, M.J.; Roh, M.; Park, S.W.; Chun, D.H.; Son, M.J.; Lee, J.Y. Operational Analysis of Container Ships by Using Maritime Big Data. J. Mar. Sci. Eng. 2021, 9, 438. [Google Scholar] [CrossRef]
- Hofer, E.; v. Mohrenschildt, M. Model-Free Data Mining of Families of Rotating Machinery. Appl. Sci. 2022, 12, 3178. [Google Scholar] [CrossRef]
- Mollajan, A.; Iranmanesh, H.; Khezri, A.H.; Abazari, A. Effect of Applying Independence Axiom of Axiomatic Design Theory on Performance of an Integrated Manufacturing Information System: A Computer Simulation Modeling Approach. Simulation 2022, 98, 535–561. [Google Scholar] [CrossRef]
- UlHaq, A.; Fahad, S.; Gul, S.; Rui, B. Intelligent Control Schemes for Maximum Power Extraction from Photovoltaic Arrays under Faults. Energies 2023, 16, 974. [Google Scholar] [CrossRef]
- Zulu, M.L.T.; Carpanen, R.P.; Tiako, R. A Comprehensive Review: Study of Artificial Intelligence Optimization Technique Applications in a Hybrid Microgrid at Times of Fault Outbreaks. Energies 2023, 16, 1786. [Google Scholar] [CrossRef]
- Milidonis, K.; Blanco, M.J.; Grigoriev, V.; Panagiotou, C.F.; Bonanos, A.M.; Constantinou, M.; Pye, J.; Asselineau, C.-A. Review of Application of AI Techniques to Solar Tower Systems. Sol. Adv. Mech. Eng. 2023, 15, 500–515. [Google Scholar] [CrossRef]
- Qian, K. Research on Control Theory System Based on Computer Artificial Intelligence Technology. J. Phys. Conf. Ser. 2023, 2493, 012019. [Google Scholar] [CrossRef]
- Kyriakos, T.; Johann, M. Deepest Shipwreck Discovery. Sea Technol. 2022, 63, 10–13. [Google Scholar]
- Bigman, D.P.; Day, D.J. Ground Penetrating Radar Inspection of a Large Concrete Spillway: A Case-Study Using SFCW GPR at a Hydroelectric Dam. Case Stud. Constr. Mater. 2022, 16, e000975. [Google Scholar] [CrossRef]
- Mohamed, M.A.-H.; Ramadan, M.A.; El-Dash, K.M. Cost Optimization of Sewage Pipelines Inspection. Ain Shams Eng. J. 2023, 14, 1960. [Google Scholar] [CrossRef]
- Oliva, M.; De, M.L.; Cuccaro, A.; Fumagalli, G.; Freitas, R.; Fontana, N.; Raugi, M.; Barmada, S.; Pretti, C. Introducing Energy into Marine Environments: A Lab-Scale Static Magnetic Field Submarine Cable Simulation and Its Effects on Sperm and Larval Development on a Reef Forming Serpulid. Environ. Pollut. 2023, 328, 121625. [Google Scholar] [CrossRef] [PubMed]
- Zaca-Morán, P.; Cuvas-Limón, J.M.; Padilla-Martínez, J.P.; Amaxal-Cuatetl, C.; Gómez-Pavón, L.C.; Zaca-Morán, R.; Ortega-Mendoza, J.G. Experimental Study of Saturable and Reverse Saturable Absorption of Zn Nanoparticles Photodeposited onto Etched Optical Fibers. Opt. Commun. 2023, 530, 129032. [Google Scholar] [CrossRef]
- Casanova, E.; Knowles, T.D.J.; Bayliss, A.; Walton-Doyle, C.; Barclay, A.; Evershed, R.P. Compound-Specific Radiocarbon Dating of Lipid Residues in Pottery Vessels: A New Approach for Detecting the Exploitation of Marine Resources. J. Archaeol. Sci. 2022, 137, 105528. [Google Scholar] [CrossRef]
- Xiong, M.L.; Xie, G.M. Swarm Game and Task Allocation for Autonomous Underwater Robots. J. Mar. Sci. Eng. 2023, 11, 148. [Google Scholar] [CrossRef]
- Chen, G.; Zhao, Z.H.; Wang, Z.Y.; Tu, J.J.; Hu, H.S. Swimming Modeling and Performance Optimization of a Fish-Inspired Underwater Vehicle (FIUV). Ocean. Eng. 2023, 271, 113748. [Google Scholar] [CrossRef]
- Tholen, C.; ElMihoub, T.A.; Nolle, L.; Zielinski, O. Artificial Intelligence Search Strategies for Autonomous Underwater Vehicles Applied for Submarine Groundwater Discharge Site Investigation. J. Mar. Sci. Eng. 2022, 10, 7. [Google Scholar] [CrossRef]
- Glaviano, F.; Esposito, R.; Cosmo, A.D.; Esposito, F.; Gerevini, L.; Ria, A.; Molinara, M.; Bruschi, P.; Costantini, M.; Zupo, V. Management and Sustainable Exploitation of Marine Environments through Smart Monitoring and Automation. J. Mar. Sci. Eng. 2022, 10, 297. [Google Scholar] [CrossRef]
- Hotta, S.; Mitsui, Y.; Suka, M.; Sakagami, N.; Kawamura, S. Lightweight Underwater Robot Developed for Archaeological Surveys and Excavations. ROBOMECH J. 2023, 10, 2. [Google Scholar] [CrossRef]
- Ahmad, F.; Daniel, M.T.; Marco, F.; Damianos, C.; Marc, N.; Enoc, M.; Jacopo, A. New Coastal Crawler Prototype to Expand the Ecological Monitoring Radius of OBSEA Cabled Observatory. J. Mar. Sci. Eng. 2023, 11, 857. [Google Scholar]
- Jin, S.; Bak, J.; Kim, J.; Seo, T.W.; Kim, H.S. Switching PD-Based Sliding Mode Control for Hovering of a Tilting-Thruster Underwater Robot. PLoS ONE 2018, 13, e0194427. [Google Scholar] [CrossRef] [Green Version]
- Harsh, G.; Prakash, C.S.; Kashif, N.; Ibrahim, A.A.A.; Muhammad, R.H.; Narendra, S.Y.; Pankaj, S.; Manoj, G.; Laxmi, C. PSO Based Multi-Objective Approach for Controlling PID Controller. Comput. Mater. Contin. 2022, 71, 4409–4423. [Google Scholar]
- Bingul, Z.; Gul, K. Intelligent-PID with PD Feedforward Trajectory Tracking Control of an Autonomous Underwater Vehicle. Machines 2023, 11, 300. [Google Scholar] [CrossRef]
- Tian, Q.H.; Wang, T.; Song, Y.M.; Wang, Y.X.; Liu, B. Autonomous Underwater Vehicle Path Tracking Based on the Optimal Fuzzy Controller with Multiple Performance Indexes. J. Mar. Sci. Eng. 2023, 11, 263. [Google Scholar] [CrossRef]
- Keymasi, K.A.; Bahrami, S. Finite-Time Sliding Mode Control of Underwater Vehicles in 3D Space. Trans. Inst. Meas. Control. 2022, 44, 3215–3228. [Google Scholar] [CrossRef]
- Hernandez-Sanchez, A.; Poznyak, A.; Chairez, I. Robust Proportional–Integral Control of Submersible Autonomous Robotized Vehicles by Backstepping-Averaged Sub-Gradient Sliding Mode Control. Ocean. Eng. 2022, 263, 112196. [Google Scholar] [CrossRef]
- TabatabaeeNasab, F.S.; Moosavian, S.A.A.; Keymasi, K.A. Adaptive Fault-Tolerant Control for an Autonomous Underwater Vehicle. Robotica 2022, 40, 4076–4089. [Google Scholar] [CrossRef]
- Jaime, A.-L.; Álvaro, G. Robust Model Predictive Control Based on Active Disturbance Rejection Control for a Robotic Autonomous Underwater Vehicle. J. Mar. Sci. Eng. 2023, 11, 929. [Google Scholar]
- Ru, J.Y.; Hao, D.Q.; Zhang, A.Y.; Xu, H.L.; Jia, Z.X. Research on a Hybrid Neural Network Task Assignment Algorithm for Solving Multi-Constraint Heterogeneous Autonomous Underwater Robot Swarms. Front. Neurorobot. 2023, 16, 1055056. [Google Scholar] [CrossRef]
- Wang, H.D.; Zhai, Y.X.; Shah, U.H.; Karkoub, M.; Li, M. Adaptive Fuzzy Control of Underwater Vehicle Manipulator System with Dead-Zone Band Input Nonlinearities via Fuzzy Performance and Disturbance Observers. Ocean. Eng. 2023, 277, 114194. [Google Scholar] [CrossRef]
- Pham, D.A.; Han, S.H. Design of Combined Neural Network and Fuzzy Logic Controller for Marine Rescue Drone Trajectory-Tracking. J. Mar. Sci. Eng. 2022, 10, 1716. [Google Scholar] [CrossRef]
- Hasan, M.W.; Abbas, N.H. An Adaptive Neural Network with Nonlinear FOPID Design of Underwater Robotic Vehicle in the Presence of Disturbances, Uncertainty, and Obstacles. Ocean. Eng. 2023, 279, 114451. [Google Scholar] [CrossRef]
- Sedghi, F.; Mehdi, A.M.; Abooee, A. Command Filtered-Based Neuro-Adaptive Robust Finite-Time Trajectory Tracking Control of Autonomous Underwater Vehicles under Stochastic Perturbations. Neurocomputing 2023, 519, 158–172. [Google Scholar] [CrossRef]
- Zhilenkov, A.; Chernyi, S.; Firsov, A. Autonomous Underwater Robot Fuzzy Motion Control System with Parametric Uncertainties. Designs 2021, 5, 24. [Google Scholar] [CrossRef]
- Jesus, G.; Ahmed, C.; Jorge, T.; Vincent, C. Time-Delay High-Order Sliding Mode Control for Trajectory tracking of Autonomous Underwater Vehicles under Disturbances. Ocean. Eng. 2023, 268, 113375. [Google Scholar]
- Siddhartha, V.; Subhasish, M. 3D Path Following Control of an Autonomous Underwater Robotic Vehicle Using Backstepping Approach Based Robust State Feedback Optimal Control Law. J. Mar. Sci. Eng. 2023, 11, 277. [Google Scholar]
- Khoshnam, S. Neural Network Feedback Linearization Target Tracking Control of Underactuated Autonomous Underwater Vehicles with a Guaranteed Performance. Ocean Eng. 2022, 258, 111827. [Google Scholar]
- Duan, K.R.; Fong, S.; Chen, C.L.P. Fuzzy Observer-Based Tracking Control of an Underactuated Underwater Vehicle with Linear Velocity Estimation. IET Control. Theory Appl. 2020, 14, 584–593. [Google Scholar] [CrossRef]
- Bui, P.D.H.; You, S.-S.; Kim, H.-S.; Lee, S.-D. Dynamics Modeling and Motion Control for High-Speed Underwater Vehicles Using H-Infinity Synthesis with Anti-Windup Compensator. J. Ocean. Eng. Sci. 2022, 7, 84–91. [Google Scholar] [CrossRef]
- Wassef, H.M.; Hadi, A. Disturbance Rejection for Underwater Robotic Vehicle Based on Adaptive Fuzzy with Nonlinear PID Controller. ISA Trans. 2022, 130, 360–376. [Google Scholar]
- Yan, Z.P.; Yang, Y.Y.; Zhang, W.; Gong, Q.S.; Zhang, Y.; Zhao, L.Y. Robust Nonlinear Model Predictive Control of a Bionic Underwater Robot with External Disturbances. Ocean. Eng. 2022, 253, 111310. [Google Scholar] [CrossRef]
- Menezes, J.; Sands, T. Discerning Discretization for Unmanned Underwater Vehicles DC Motor Control. J. Mar. Sci. Eng. 2023, 11, 436. [Google Scholar] [CrossRef]
- Ekaterina, K.; Yaroslav, G. Development of an Application for Controlling an Underwater Vehicle. Transp. Res. Procedia 2023, 68, 858–862. [Google Scholar]
- Amir, N.; Khoshnam, S.; Abbas, C. Platoon Formation Control of Autonomous Underwater Vehicles Under LOS Range and Orientation Angles Constraints. Ocean Eng. 2023, 271, 113674. [Google Scholar]
- He, Y.; Xie, Y.; Pan, G.; Cao, Y.H.; Huang, Q.G.; Ma, S.M.; Zhang, A.L.; Cao, Y. Depth and Heading Control of a Manta Robot Based on S-Plane Control. J. Mar. Sci. Eng. 2022, 10, 1698. [Google Scholar] [CrossRef]
- Jiang, C.M.; Wan, L.; Zhang, H.R.; Tang, J.; Wang, J.G.; Li, S.P.; Chen, L.; Wu, G.X.; He, B. A LSSVR Interactive Network for AUV Motion Control. J. Mar. Sci. Eng. 2023, 11, 1111. [Google Scholar] [CrossRef]
- Lee, H.; Jeong, D.; Yu, H.; Ryu, J. Autonomous Underwater Vehicle Control for Fishnet Inspection in Turbid Water Environments. Int. J. Control. Autom. Syst. 2022, 20, 3383–3392. [Google Scholar] [CrossRef]
- Sun, Y.S.; Ran, X.R.; Cao, J.; Li, Y.M. Deep Submergence Rescue Vehicle Docking Based on Parameter Adaptive Control with Acoustic and Visual Guidance. Int. J. Adv. Robot. Syst. 2020, 17, 17298814. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.Y.; Ye, X.F.; Liu, W.Z. Online Adaptive Critic Learning Control of Unknown Dynamics with Application to Deep Submergence Rescue Vehicle. IEEE Access 2020, 8, 96565–96580. [Google Scholar] [CrossRef]
- Jeraldin, D.A. Parallel Tuning of Fuzzy Tracking Controller for Deep Submergence Rescue Vehicle using Genetic Algorithm. Indian J. Geo. Mar. Sci. 2017, 46, 2228–2240. [Google Scholar]
- Sun, Y.S.; Ran, X.R.; Zhang, G.C.; Wu, F.Y.; Du, C.R. Distributed Control System Architecture for Deep Submergence Rescue Vehicles. Int. J. Nav. Archit. Ocean. Eng. 2019, 11, 274–284. [Google Scholar] [CrossRef]
- Serhat, Y. Development Stages of a Semi-Autonomous Underwater Vehicle Experiment Platform. Int. J. Adv. Robot. Syst. 2022, 19, 3710. [Google Scholar] [CrossRef]
- Rossi, C.; Caro, Z.A.; Milosevic, Z.; Suarez, R.; Dominguez, S. Topological Navigation for Autonomous Underwater Vehicles in Confined Semi-Structured Environments. Sensors 2023, 23, 2371. [Google Scholar] [CrossRef]
- Cotroneo, D.; Simone, L.D.; Natella, R. Timing Covert Channel Analysis of the VxWorks MILS Embedded Hypervisor under the Common Criteria Security Certification. Comput. Secur. 2021, 106, 102307. [Google Scholar] [CrossRef]
- McMahon, J.; Plaku, E. Autonomous Data Collection with Timed Communication Constraints for Unmanned Underwater Vehicles. IEEE Robot. Autom. Lett. 2021, 6, 1832–1839. [Google Scholar] [CrossRef]
- Zuluaga, C.A.; Aristizábal, L.M.; Rúa, S.; Franco, D.A.; Osorio, D.A.; Vásquez, R.E. Development of a Modular Software Architecture for Underwater Vehicles Using Systems Engineering. J. Mar. Sci. Eng. 2022, 10, 464. [Google Scholar] [CrossRef]
- Kim, J.; Kang, S.W.; Ahn, J.S.; Lee, S. EMSA: Extensibility Metric for Software Architecture. Int. J. Softw. Eng. Knowl. Eng. 2018, 28, 371–405. [Google Scholar] [CrossRef]
- Chen, G.F.; Sheng, M.W.; Wan, L.; Liu, Y.H.; Zhang, Z.Y.; Xu, Y.F. Tracking Control for Small Autonomous Underwater Vehicles in the Trans-Atlantic Geotraverse Hydrothermal Field Based on the Modeling Trajectory. Appl. Ocean. Res. 2022, 127, 103281. [Google Scholar] [CrossRef]
- Shin, Y.S.; Kim, J.H. Sensor Data Reconstruction for Dynamic Responses of Structures Using External Feedback of Recurrent Neural Network. Sensors 2023, 23, 2737. [Google Scholar] [CrossRef] [PubMed]
- Kahana, A.; Turkel, E.; Dekel, S.; Givoli, D. A physically-Informed Deep-Learning Model using Time-Reversal for Locating a Source from Sparse and Highly Noisy Sensors Data. J. Comput. Phys. 2022, 470, 111592. [Google Scholar] [CrossRef]
- Thomas, T.; Thomas, J.; Aschenbruck, N. Learning a Transform Base for the Multi-to Hyperspectral Sensor Network with K-SVD. Sensors 2021, 21, 7296. [Google Scholar]
- Marius, C.L.; Bagger, H.J.; Fischer, C.P. Cloud K-SVD for Image Denoising. SN Comput. Sci. 2022, 3, 151. [Google Scholar]
- Roy, S.; Acharya, D.P.; Sahoo, A.K. Fast OMP Algorithm and Its FPGA Implementation for Compressed Sensing-Based Sparse Signal Acquisition Systems. IET Circuits Devices Syst. 2021, 15, 511–521. [Google Scholar] [CrossRef]
- Fernandez, R.A.S.; Milosevic, Z.; Dominguez, S.; Rossi, C. Nonlinear Attitude Control of a Spherical Underwater Vehicle. Sensors 2019, 19, 1445. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, Y.Q.; Che, J.X.; Cao, C.Y. Advanced Autonomous Underwater Vehicles Attitude Control with L1 Backstepping Adaptive Control Strategy. Sensors 2019, 19, 4848. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, Q.; Zhu, D.Q.; Liu, Z.B. Attitude Control of Aerial and Underwater Vehicles using Single-Input Fuzzy PID Controller. Appl. Ocean. Res. 2020, 107, 102460. [Google Scholar] [CrossRef]
- Chikh, L.; Chemori, A.; Wang, S. Multivariable L1 Adaptive Depth and Attitude Control of MEROS Underwater Robot with Real-Time Experiments. IFAC Pap. 2022, 55, 67–72. [Google Scholar] [CrossRef]
- Li, C.Y.; Guo, S.X. Performance Evaluation of Spherical Underwater Robot with Attitude Controller. Ocean. Eng. 2023, 268, 113434. [Google Scholar] [CrossRef]





































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| DOF | Initial Value | Desired Value | Maximum Overshoot | Standard Deviation | Arithmetic Mean Value |
|---|---|---|---|---|---|
| surge | 0 m | 2 m | 0.125 m | 0.042 m | 0.042 m |
| sway | −4 m | −0.5 m | 0.116 m | 0.049 m | 0.021 m |
| heave | 0 m | 4 m | 0.109 m | 0.053 m | −0.017 m |
| roll | 0.3° | 5° | 0.284° | 0.058° | 0.037° |
| pitch | −2° | −1°, 1°, 10° | 1.931° | 2.843° | −1.341° |
| yaw | −76° | −100° | 1.650° | 0.559° | 0.203° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Zhang, H.; Wan, L.; Lv, J.; Wang, J.; Tang, J.; Wu, G.; He, B. Design and Verification of Deep Submergence Rescue Vehicle Motion Control System. Sensors 2023, 23, 6772. https://doi.org/10.3390/s23156772
Jiang C, Zhang H, Wan L, Lv J, Wang J, Tang J, Wu G, He B. Design and Verification of Deep Submergence Rescue Vehicle Motion Control System. Sensors. 2023; 23(15):6772. https://doi.org/10.3390/s23156772
Chicago/Turabian StyleJiang, Chunmeng, Hongrui Zhang, Lei Wan, Jinhua Lv, Jianguo Wang, Jian Tang, Gongxing Wu, and Bin He. 2023. "Design and Verification of Deep Submergence Rescue Vehicle Motion Control System" Sensors 23, no. 15: 6772. https://doi.org/10.3390/s23156772