
Strain Transfer Mechanism in Surface-Bonded Distributed Fiber Optic Sensors under Different Strain Fields
Abstract
:1. Introduction
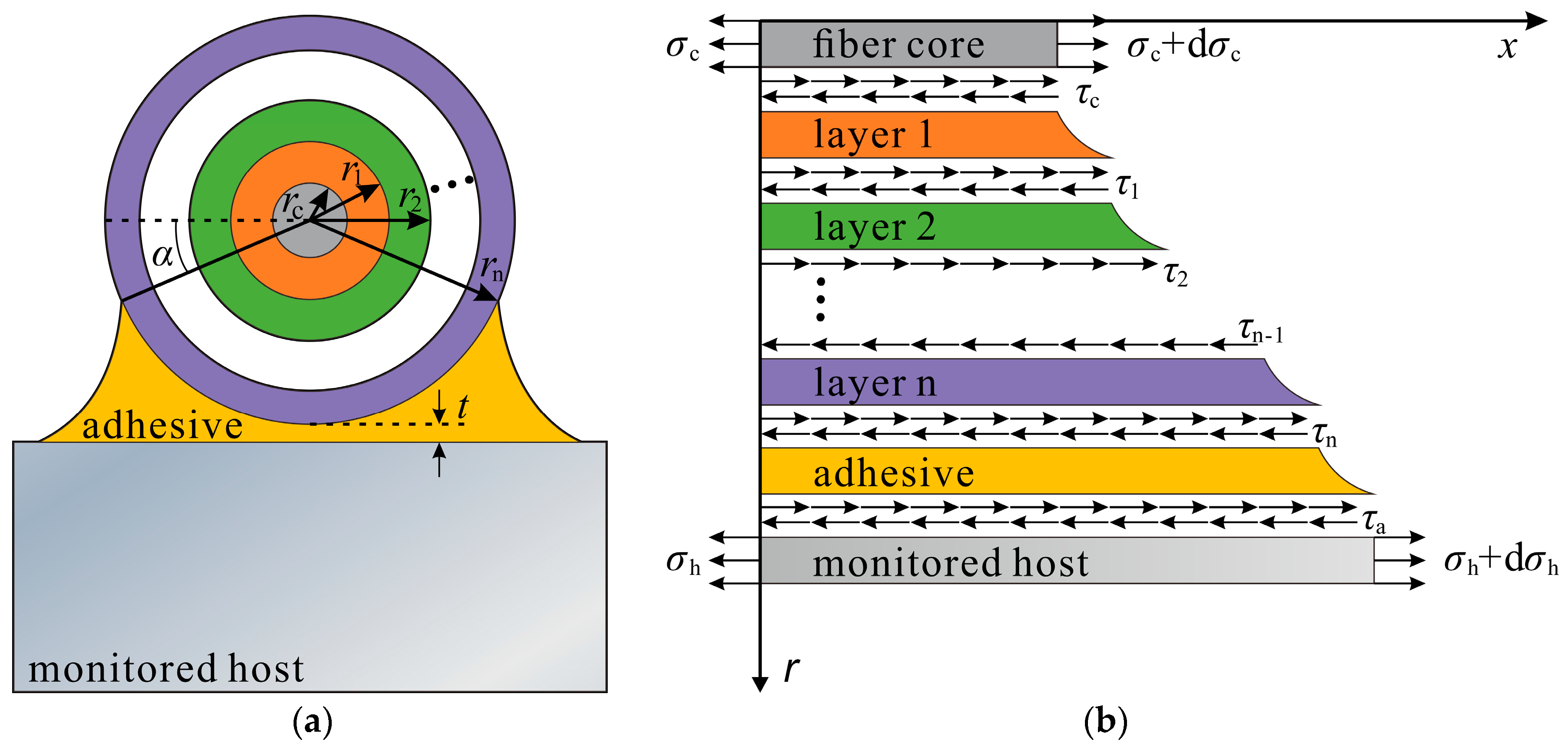
2. Strain Transfer Model
- (1)
- The core, protective layers (jacket), and the adhesive layer of the FO cable are linear elastic materials, with each layer well-bonded and featuring no relative slippage.
- (2)
- Made from silicon dioxide, the fiber core and cladding are collectively known as the fiber core layer.
- (3)
- Only the shear stress transfer between each protective layer and adhesive within the bonded area is factored in.
3. Analytical Solutions under Different Strain Fields
3.1. Linear Strain Fields
3.1.1. Uniform Strain Field
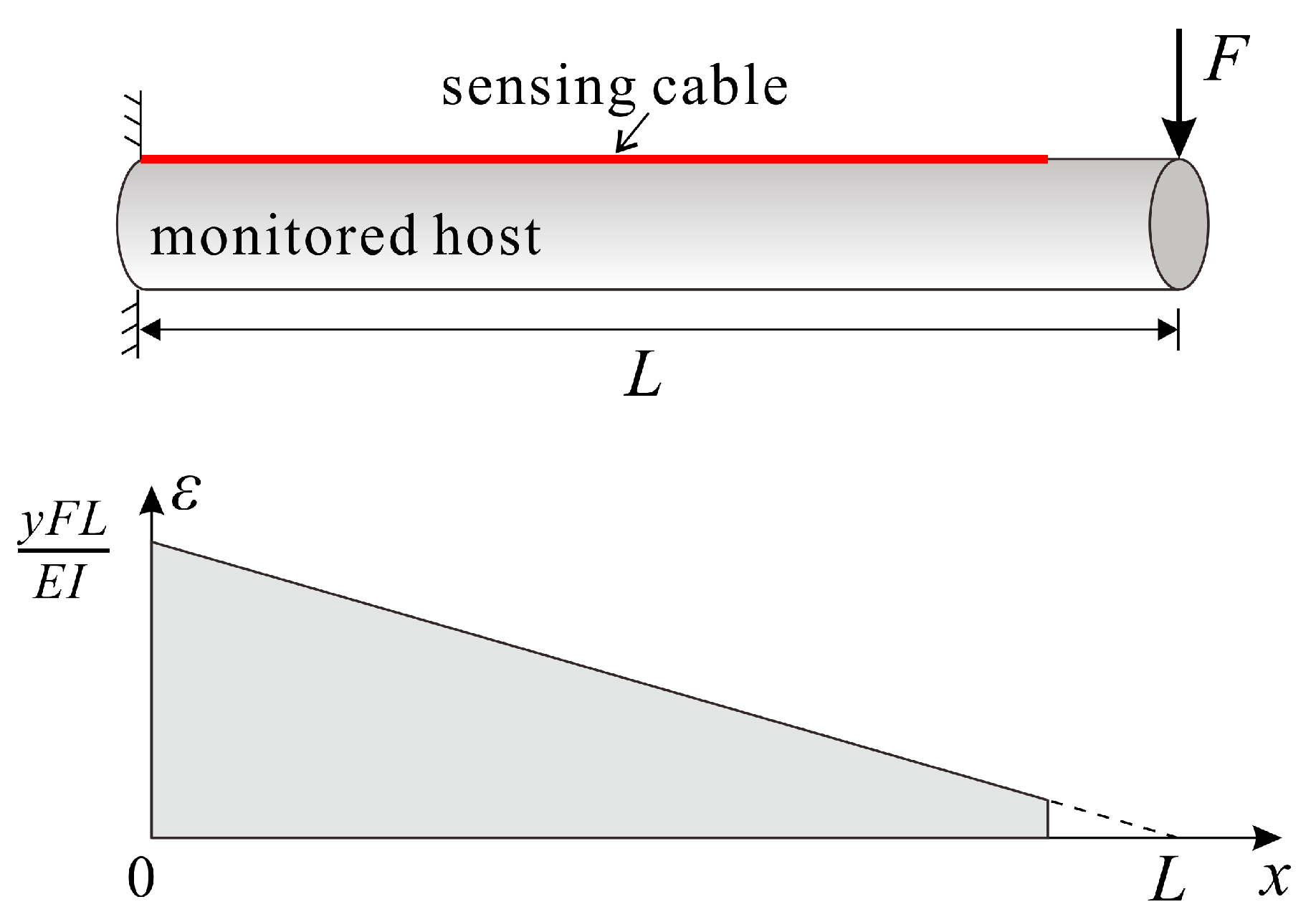
3.1.2. Single-Linear Gradient Strain Field
3.2. Nolinear Strain Fields
3.2.1. Parabolic Strain Field
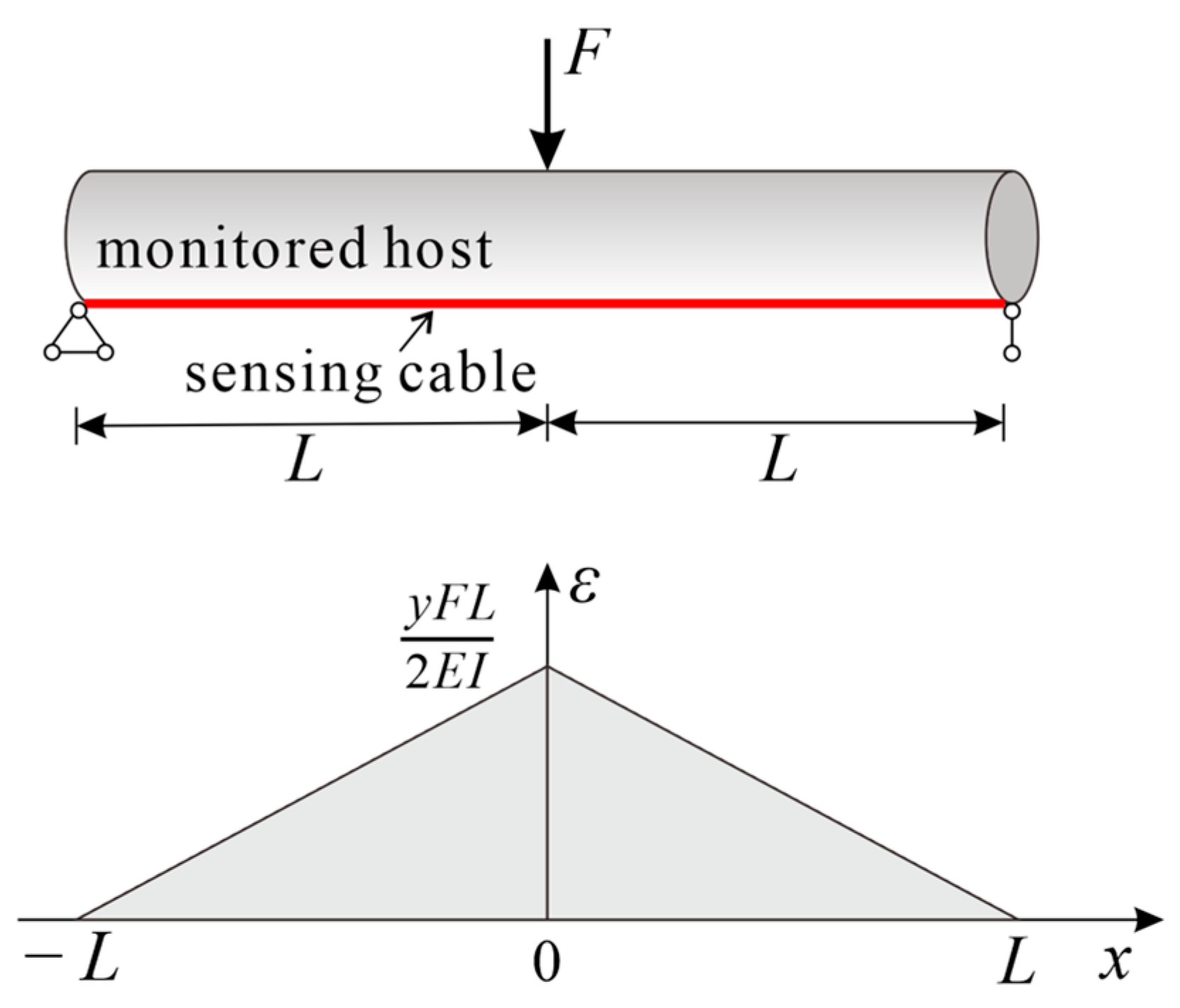
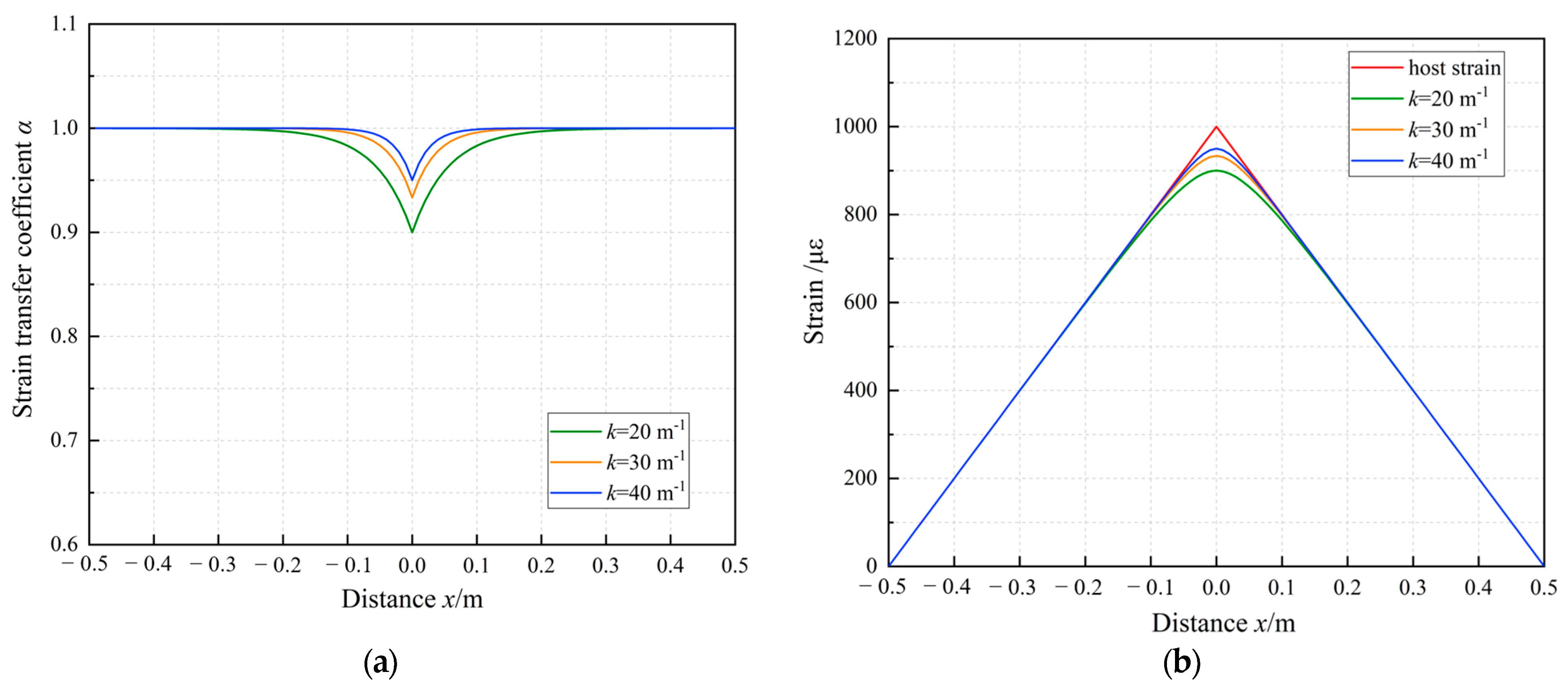
3.2.2. Bilinear Gradient Strain Field
4. Experimental Validation
4.1. Test Setup and Procedure
4.2. Test Results and Analysis
5. Parametric Analysis
6. Conclusions
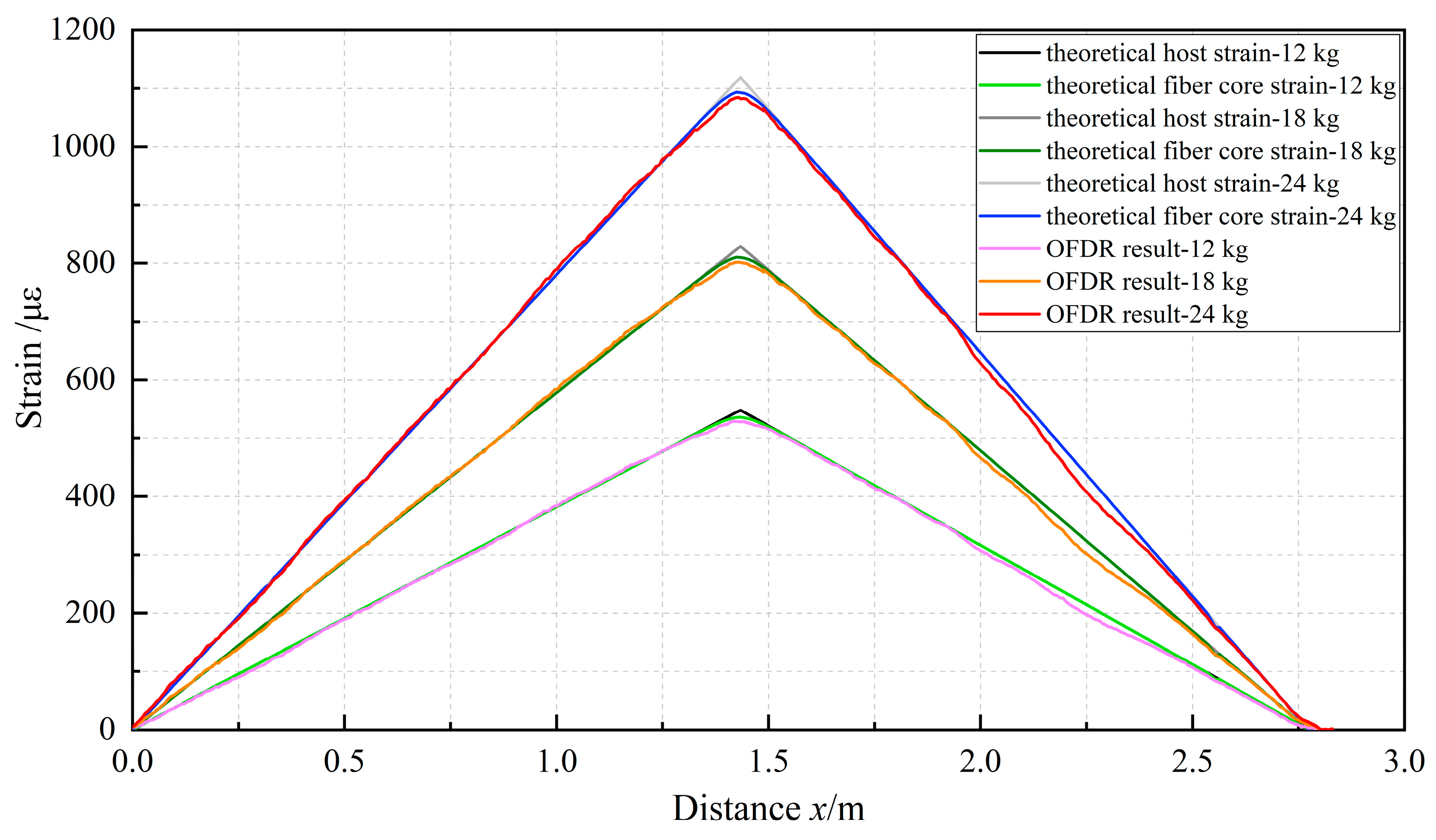
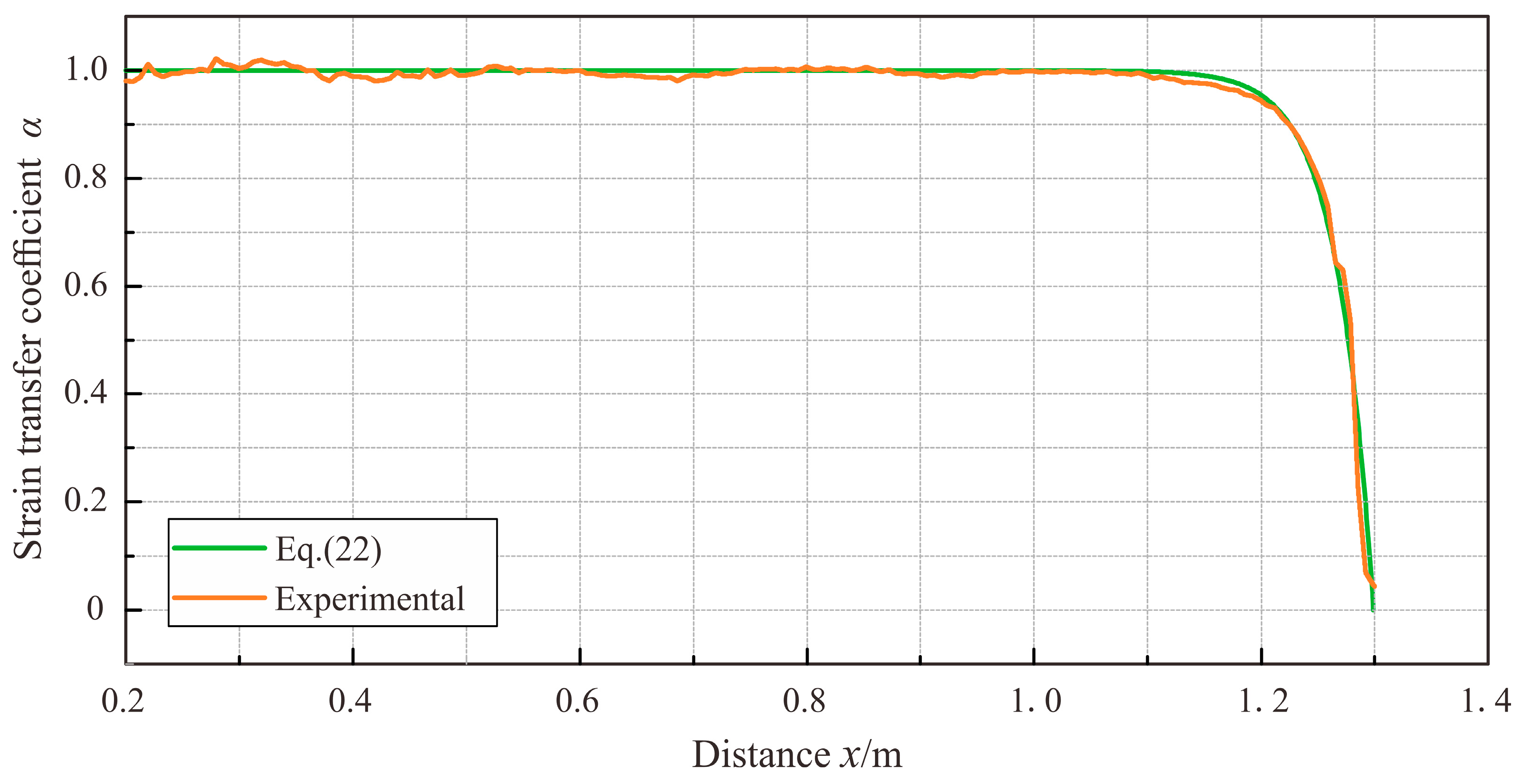
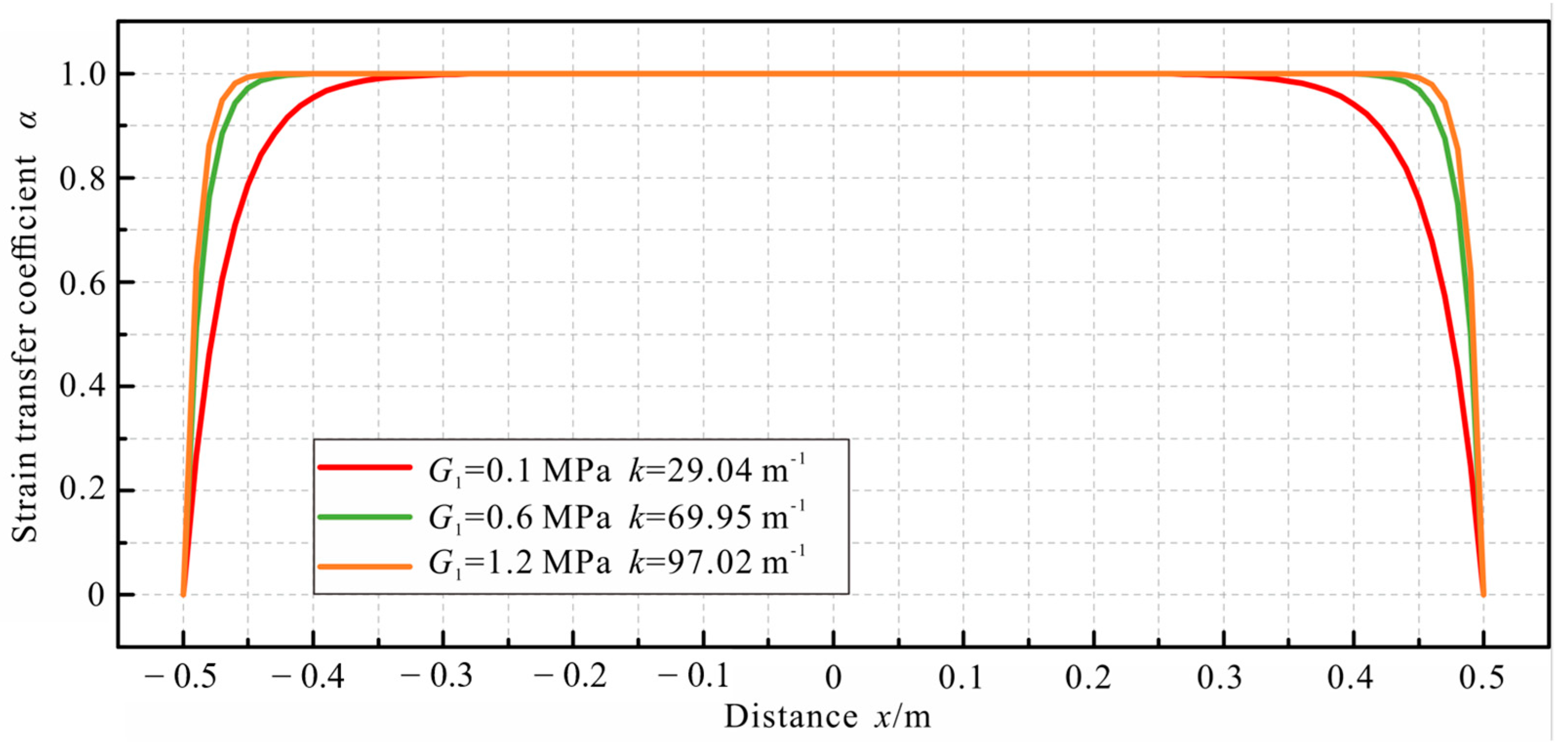
- The strain distribution of the monitored host had an effect on the strain transfer of the DFO sensor. In the linear strain field, there was a noticeable low-strain segment at both ends of the bonded cable area, and the strain transfer performed well across the cable, except for the low-strain sensing segment. As the shear lag coefficient k of the cable decreased, the length of the low-strain sensing section Llow increased. In applications, the ideal length of the deployed cable should exceed 2Llow. In the case of a shorter cable length or a small shear lag coefficient, it is necessary to review the strain transfer mechanism of the sensing cable in a way that examines and rectifies errors from the system for measuring the strain in DFO sensors.
- In the bilinear gradient strain field, the strain loss of the sensing cable occurred at the inflection point of the monitored host’s strain distribution, albeit with limited influence. Notably, when the shear lag coefficient k reached 40 m−1, the strain transfer coefficient of the bonded cable segment consistently exceeded 0.95. However, in scenarios where the equipment’s spatial resolution is high and the dimensions of the monitored host are small, careful consideration should be given to the impact of strain loss at the inflection point on the accuracy of strain measurements.
- The findings from the parametric analysis revealed that the shear modulus of protective layers, such as the coatings and jackets, was positively correlated with the shear lag coefficient k and strain transfer performance of the cable. Additionally, such performance was most influenced by the shear modulus of the low-strength inner coating and moderately impacted by that of the outer protective layer. Furthermore, the radius of the jacket and adhesive layer inversely affected the shear lag coefficient k of the cable, resulting in a reduction in its strain transfer performance. However, the magnitude of this impact was relatively minor. When engaging in surface bonding, it is advisable to position the cable in close proximity to the surface of the to-be-monitored host.
- In practical applications, it is advisable to opt for coating materials with a higher shear modulus to mitigate adverse impacts on strain transfer in the cable. An increase in the shear modulus of the jacket and other protective layers can, to a limited extent, improve the strain transfer performance of the cable. However, an excessive shear modulus of the jacket compromises the cable’s capability to measure peak strain, which thus necessitates the control of the jacket shear modulus within a reasonable range. Although thicker protective layers reduce the strain transfer performance of the cable, the extent of this influence is limited. Therefore, appropriately increasing the thickness of the protective layers can enhance their resilience against harsh engineering environments.
- The results in this paper are based on several simple strain forms, and preliminarily reveal the influence of strain distribution on the strain transfer of DFO sensors, which provides a theoretical foundation. However, in practical engineering, the strain field of the structure is difficult to describe using simple expressions, and the strain transfer of DFO sensors in this issue needs to be further explored.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bao, X.Y.; Chen, L. Recent Progress in Distributed Fiber Optic Sensors. Sensors 2012, 12, 8601–8639. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, H.N.; Li, D.S.; Song, G.B. Recent applications of fiber optic sensors to health monitoring in civil engineering. Eng. Struct. 2004, 26, 1647–1657. [Google Scholar] [CrossRef]
- Fan, L.; Tan, X.; Zhang, Q.H.; Meng, W.N.; Chen, G.D.; Bao, Y. Monitoring corrosion of steel bars in reinforced concrete based on helix strains measured from a distributed fiber optic sensor. Eng. Struct. 2020, 204, 110039. [Google Scholar] [CrossRef]
- Wang, D.Y.; Zhu, H.H.; Huang, J.W.; Yan, Z.R.; Zheng, X.; Shi, B. Fiber optic sensing and performance evaluation of a water conveyance tunnel with composite linings under super-high internal pressures. J. Rock Mech. Geotech. Eng. 2023, in press. [Google Scholar] [CrossRef]
- Soga, K.; Luo, L.Q. Distributed fiber optics sensors for civil engineering infrastructure sensing. J. Struct. Integr. Maint. 2016, 3, 1–21. [Google Scholar] [CrossRef]
- Pelecanos, L.; Soga, K.; Elshafie, Z.E.B.M.; Battista, D.N.; Kechavarzi, C.; Gue, C.Y.; Ouyang, Y.; Seo, H.J. Distributed Fiber Optic Sensing of Axially Loaded Bored Piles. J. Geotech. Geoenvironmental Eng. 2018, 144, 04017122. [Google Scholar] [CrossRef] [Green Version]
- Ma, J.X.; Pei, H.F.; Zhu, H.H.; Shi, B.; Yin, J.H. A review of previous studies on the applications of fiber optic sensing technologies in geotechnical monitoring. Rock Mech. Bull. 2023, 2, 100121. [Google Scholar] [CrossRef]
- Zheng, X.; Shi, B.; Zhu, H.H.; Zhang, C.C.; Wang, X.; Sun, M.Y. Performance monitoring of offshore PHC pipe pile using BOFDA based distributed fiber optic sensing system. Geomech. Eng. 2021, 24, 337–348. [Google Scholar] [CrossRef]
- Shi, B.; Zhang, D.; Zhu, H.H.; Zhang, C.C.; Gu, K.; Sang, H.W.; Han, H.M.; Sun, M.Y.; Liu, J. DFOS Applications to Geo-Engineering Monitoring. Photonic Sens. 2021, 11, 158–186. [Google Scholar] [CrossRef]
- Shan, Z.; Wu, H.; Ni, W.; Sun, M.; Wang, K.; Zhao, L.; Lou, Y.; Liu, A.; Xie, W.; Zheng, X.; et al. Recent Technological and Methodological Advances for the Investigation of Submarine Landslides. J. Mar. Sci. Eng. 2022, 10, 1728. [Google Scholar] [CrossRef]
- Zhang, C.C.; Shi, B.; Gu, K.; Liu, S.P.; Wu, J.H.; Zhang, S.; Zhang, L.; Jiang, H.T.; Wei, G.Q. Vertically Distributed Sensing of Deformation Using Fiber Optic Sensing. Geophys. Res. Lett. 2018, 45, 11732–11741. [Google Scholar] [CrossRef]
- Zhang, C.C.; Shi, B.; Zhu, H.H.; Wang, B.J.; Wei, G.Q. Toward Distributed Fiber-Optic Sensing of Subsurface Deformation: A Theoretical Quantification of Ground-Borehole-Cable Interaction. J. Geophys. Res. Solid Earth 2020, 125, e2019JB018878. [Google Scholar] [CrossRef]
- Shi, B.; Zhang, C.C.; Fang, K.; Shi, S.G.; Wei, G.Q.; Hoitink, A.J.F. Soil Stratum Tides. Geophys. Res. Lett. 2022, 50, e2022GL101621. [Google Scholar] [CrossRef]
- Zhang, L.; Cui, Y.; Zhu, H.H.; Wu, H.; Han, H.M.; Yan, Y.; Shi, B. Shear deformation calculation of landslide using distributed strain sensing technology considering the coupling effect. Landslides 2023, 20, 1583–1597. [Google Scholar] [CrossRef]
- Zhang, L.; Zhu, H.H.; Han, H.M.; Shi, B. Fiber optic monitoring of an anti-slide pile in a retrogressive landslide. J. Rock Mech. Geotech. Eng. 2023, in press. [Google Scholar] [CrossRef]
- Ye, X.; Zhu, H.H.; Wang, J.; Zhang, Q.; Shi, B.; Schenato, L.; Pasuto, A. Subsurface Multi-Physical Monitoring of a Reservoir Landslide with the Fiber-Optic Nerve System. Geophys. Res. Lett. 2022, 49, e2022GL098211. [Google Scholar] [CrossRef]
- Ye, X.; Zhu, H.H.; Cheng, G.; Pei, H.F.; Shi, B.; Schenato, L.; Pasuto, A. Thermo-hydro-poro-mechanical responses of a reservoir-induced landslide tracked by high-resolution fiber optic sensing nerves. J. Rock Mech. Geotech. Eng. 2023, in press. [Google Scholar] [CrossRef]
- Gao, Y.X.; Zhu, H.H.; Wei, C.; Wang, J.; Zhang, W. Performance evaluation of distributed strain sensing nerves for monitoring ground collapse: A laboratory study. Measurement 2023, 217, 113100. [Google Scholar] [CrossRef]
- Sun, M.Y.; Shi, B.; Zhang, C.C.; Zheng, X.; Guo, J.Y.; Wang, Y.Q.; He, M.N.; Liu, J. Quasi-Distributed Fiber-Optic in-Situ Monitoring Technology for Large-Scale Measurement of Soil Water Content and Its Application. Eng. Geol. 2021, 294, 106373. [Google Scholar] [CrossRef]
- Sun, M.Y.; Shi, B.; Cui, Y.J.; Tang, C.S.; Zheng, X.; Zhong, P.; Wang, Y.Q.; Tong, Y.P. Evaluating three measurement methods of soil ground heat flux based on actively heated distributed temperature sensing technology. Eng. Geol. 2022, 303, 106649. [Google Scholar] [CrossRef]
- Sun, M.Y.; Shi, B.; Cui, Y.J.; Tang, C.S.; Zheng, X.; Liu, J.; Ying, Z.; Sun, Y.J.; Wang, Y.Q.; Zhou, J.X. Determination of dry soil layer and its soil heat flux distribution using actively heated distributed temperature sensing. Eng. Geol. 2023, 317, 107093. [Google Scholar] [CrossRef]
- Bastianini, F.; Di Sante, R.; Falcetelli, F.; Marini, D.; Bolognini, G. Optical Fiber Sensing Cables for Brillouin-Based Distributed Measurements. Sensors 2019, 19, 5172. [Google Scholar] [CrossRef] [Green Version]
- Yan, M.; Tan, X.; Mahjoubi, S.; Bao, Y. Strain transfer effect on measurements with distributed fiber optic sensors. Autom. Constr. 2022, 139, 104262. [Google Scholar] [CrossRef]
- Nanni, A.; Yang, C.C.; Pan, K.; Wang, J.S.; Michael, R.R., Jr. Fiber-optic sensors for concrete strain/stress measurement. ACI Mater. J. 1991, 88, 257–264. [Google Scholar] [CrossRef]
- Ansari, F.; Yuan, L.B. Mechanics of Bond and Interface Shear Transfer in Optical Fiber Sensors. J. Eng. Mech. 1998, 124, 385–394. [Google Scholar] [CrossRef]
- Cox, H.L. The elasticity and strength of paper and other fibrous materials. Br. J. Appl. Phys. 1952, 3, 72. [Google Scholar] [CrossRef]
- Li, D.S. Strain transferring analysis of fiber Bragg grating sensors. Opt. Eng. 2006, 45, 409–411. [Google Scholar] [CrossRef]
- Li, H.N. Strain transfer analysis of embedded fiber Bragg grating sensor under nonaxial stress. Opt. Eng. 2007, 39, 4440–4449. [Google Scholar] [CrossRef]
- Feng, X.; Zhou, J.; Sun, C.S.; Zhang, X.T. Theoretical and Experimental Investigations into Crack Detection with BOTDR-Distributed Fiber Optic Sensors. J. Eng. Mech. 2013, 139, 1797–1807. [Google Scholar] [CrossRef]
- Wang, H.; Xiang, P. Strain transfer analysis of optical fiber based sensors embedded in an asphalt pavement structure. Meas. Sci. Technol. 2016, 27, 075106. [Google Scholar] [CrossRef]
- Zhang, Q.H.; Sun, Y.Y.; Zhang, Z.L.; Zeng, P.; Duan, J.L.; Zhu, N.S.; Bai, J.B.; Rong, F.J. Strain transfer in distributed fiber optic sensor with optical frequency domain reflectometry technology. Opt. Eng. 2019, 58, 027109. [Google Scholar] [CrossRef]
- Falcetelli, F.; Rossi, L.; Di Sante, R.; Bolognini, G. Strain Transfer in Surface-Bonded Optical Fiber Sensors. Sensors 2020, 20, 3100. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Gao, P.; Wang, H.M.; Shi, B.; Qi, L. Study on strain transfer characteristics of distributed optical fiber sensors under complex deformation condition. J. Disaster Prev. Mitig. Eng. 2013, 33, 566–572. (In Chinese) [Google Scholar] [CrossRef]
- Zhang, B.X. Strain Transmission and Cracks Determination of Structures under Various Loading Conditions by Distributed Optical Fiber Sensors. Master Thesis, Harbin Institute of Technology, Harbin, China, 2015. (In Chinese). [Google Scholar]
- Zheng, X.; Shi, B.; Zhang, C.C.; Sun, Y.J.; Zhang, L.; Han, H.M. Strain transfer mechanism in surface-bonded distributed fiber-optic sensors subjected to linear strain gradients: Theoretical modeling and experimental validation. Measurement 2021, 179, 109510. [Google Scholar] [CrossRef]
- Tan, X.; Bao, Y.; Zhang, Q.H.; Nassif, H.; Chen, G.D. Strain transfer effect in distributed fiber optic sensors under an arbitrary field. Autom. Constr. 2021, 124, 103597. [Google Scholar] [CrossRef]
- Sun, Y.J.; Zhang, Q.; Cheng, G.; Shi, B.; Xu, H.Z. Optical frequency domain reflectometry technology based theoretical analysis and experiment on strain transferring of surface-attached optical fiber sensor. Sci. Technol. Eng. 2018, 18, 46–52. (In Chinese) [Google Scholar]
- Wei, S.M.; Chai, J. Surface pasting methods and analyses of strain transfer in rock deformation tests using FBG. Chin. J. Geotech. Eng. 2011, 124, 103597. (In Chinese) [Google Scholar]
- Zhang, Z.L.; Wang, Y.; Sun, Y.Y.; Zhang, Q.H.; You, Z.W.; Huang, X.D. Analysis and experimental study on the strain transfer mechanism of an embedded basalt fiber-encapsulated fiber Bragg grating sensor. Opt. Eng. 2017, 56, 017105. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Material | Parameter | Value | Unit |
|---|---|---|---|---|
| Fiber core | Silica | Radius rc | 62.5 | μm |
| Young’s modulus Ec | 72 | GPa | ||
| Inner coating | Acrylate (soft) | Radius r1 | 95 | μm |
| Shear modulus G1 | 0.05 | MPa | ||
| Outer coating | Acrylate (hard) | Radius r2 | 125 | μm |
| Shear modulus G2 | 0.5 | MPa | ||
| Adhesive | Epoxy resin | Thickness t | 200 | μm |
| Shear modulus Ga | 29 | MPa |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, W.; Zheng, X.; Shi, B.; Sun, M.; Wu, H.; Ni, W.; Zheng, Z.; Niu, M. Strain Transfer Mechanism in Surface-Bonded Distributed Fiber Optic Sensors under Different Strain Fields. Sensors 2023, 23, 6863. https://doi.org/10.3390/s23156863
Du W, Zheng X, Shi B, Sun M, Wu H, Ni W, Zheng Z, Niu M. Strain Transfer Mechanism in Surface-Bonded Distributed Fiber Optic Sensors under Different Strain Fields. Sensors. 2023; 23(15):6863. https://doi.org/10.3390/s23156863
Chicago/Turabian StyleDu, Wenbo, Xing Zheng, Bin Shi, Mengya Sun, Hao Wu, Weida Ni, Zhenming Zheng, and Meifeng Niu. 2023. "Strain Transfer Mechanism in Surface-Bonded Distributed Fiber Optic Sensors under Different Strain Fields" Sensors 23, no. 15: 6863. https://doi.org/10.3390/s23156863