

Adaptive Petal Reflector: In-Lab Software Configurable Optical Testing System Metrology and Modal Wavefront Reconstruction



Abstract
:1. Introduction
- The developer of the reflector must have access to a metrology system capable of a rapid evaluation of the manufacturing process, and to verify, without the availability of the whole telescope, that the surface figure aberration will remain within the envelope that can be corrected subsequently by the control system.
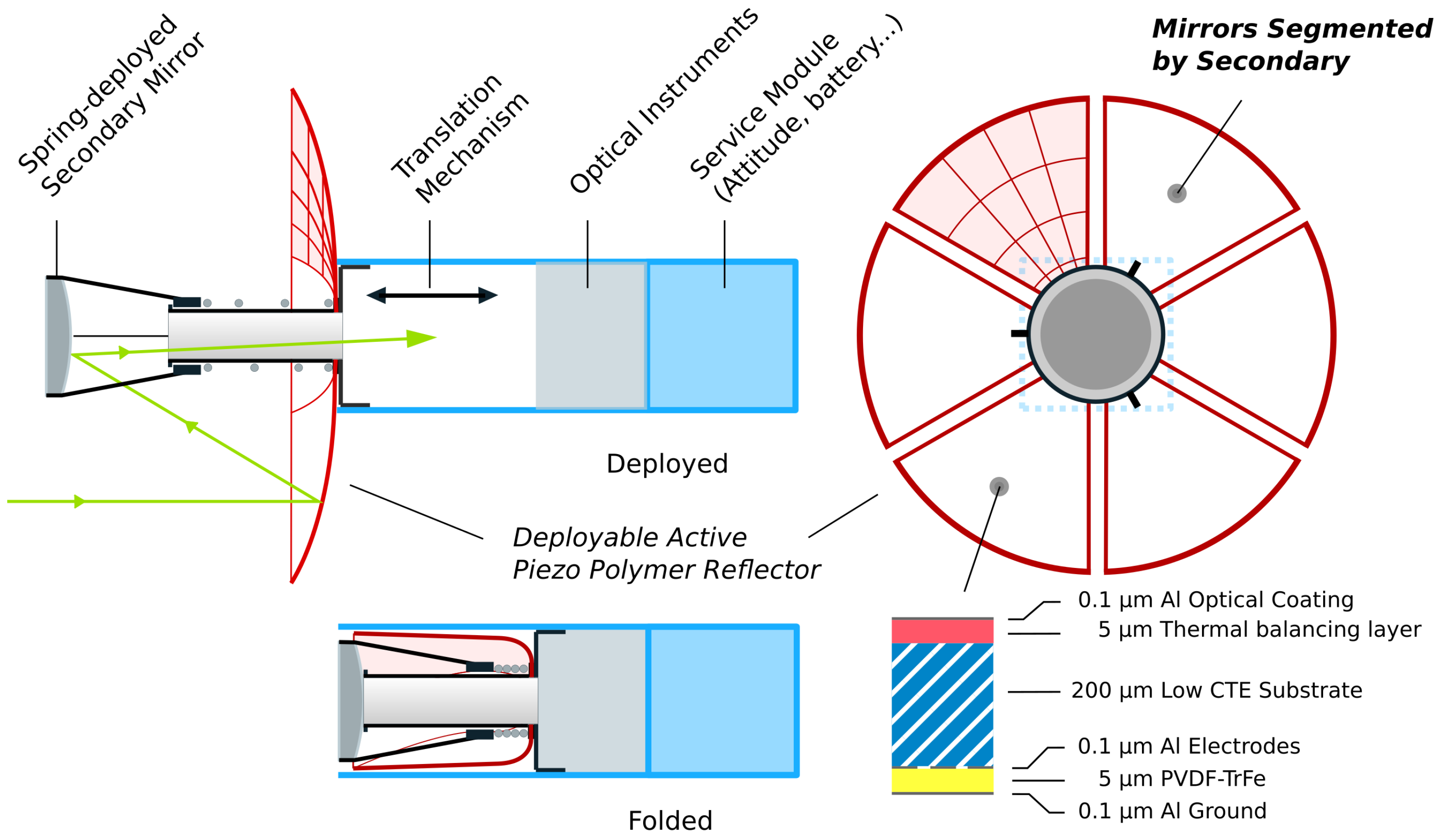
- When the primary reflector is mounted on the telescope, part of the petals are in the shade of the secondary mirror and they appear as segments (i.e., independent of each other). However, unlike segmented mirrors which require edge sensors, all the petals have a common mechanical boundary condition at the inner ring of the reflector. This paper investigates the use of this property to implement a wavefront reconstruction based on the measurement of the x-y slopes at a set of grid points (Shack–Hartmann-type sensor).
1.1. In-Lab Metrology
1.2. Vibration Modal Wavefront Reconstruction
2. SCOTS
- Zero-phase recovery: A single pixel is lit up in the -phase location of the screen and its position in the recorded image is saved (Figure 2, red dot).
- Determination of phase: Successive horizontal and vertical sinusoidal fringes with varying phase offsets are displayed. For each individual Mirror Pixel, a sine function is fit on the data from the images to determine the phase value of this pixel from to (Figure 2, blue dot).
- Phase unwrapping: as the previous step happened on a per-pixel basis, there is no global information about the phase. The global phase is recovered by a numerical phase unwrapping technique and offset according to the previously recovered zero-phase location.
2.1. Raytracing
2.2. Experimental Results
3. Modal Wavefront Reconstruction
3.1. Vibration Modes
3.2. Jacobian
3.3. Central Obstruction
4. Conclusions
- The first aspect is that of measuring the surface figure error of a spherical reflector alone, during the development and manufacturing phase. The requested accuracy is modest, because the reflector is intended to be actively controlled once in operation. The SCOTS approach has been found to be fast and satisfactory. Experimental results have been presented and their consistency with a ray-tracing virtual experiment has been assessed.
- The second part of this paper is concerned with the surface figure error reconstruction from slope measurements of a petal reflector when a central part of the mirror is obscured by the secondary mirror of the telescope, making the petals appear as completely disconnected (like segments). Using the fact that all petals have the same mechanical boundary conditions, the deformed shape is expanded in a set of orthogonal modes having the same boundary conditions (the vibration modes). The modal amplitudes are reconstructed from slope data (Shack–Hartmann) and an approximation of the surface figure error is obtained.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ESA | European Space Agency |
| FEA | Finite Element Analysis |
| FEM | Finite Element Modelling |
| PV | Peak-to-Valley |
| PVDF-TrFE | Poly(vinylidene fluoride-co-trifluoroethylene) |
| RMS | Root Mean Square |
| SCOTS | Software Configurable Optical Testing System |
| S-H | Shack–Hartmann |
| SVD | Singular Value Decomposition |
Appendix A. SCOTS Calculation
References
- Nielsen, C.J.G.; Tian, D.; Wang, K.; Preumont, A. Adaptive Deployable Thin Spherical Shell Reflectors. Actuators 2022, 11, 198. [Google Scholar] [CrossRef]
- Wang, K.; Yu, Y.; Preumont, A. Wavefront Control Strategies for Large Active Thin Shell Primaries with Unimorph Actuators. Actuators 2023, 12, 100. [Google Scholar] [CrossRef]
- Wang, K.; Godfroid, T.; Robert, D.; Preumont, A. Adaptive Shell Spherical Reflector Actuated with PVDF-TrFE Thin Film Strain Actuators. Actuators 2021, 10, 7. [Google Scholar] [CrossRef]
- Schwartz, N.; Brzozowski, W.; Milanova, M.; Morris, K.; Todd, S.; Ali, Z.; Sauvage, J.F.; Ward, A.; Lunney, D.; MacLeod, D. High-Resolution Deployable CubeSat Prototype. In Proceedings of the Space Telescopes and Instrumentation 2020: Optical, Infrared, and Millimeter Wave, Virtual, 14–22 December 2020; Volume 11443, pp. 565–577. [Google Scholar] [CrossRef]
- Dearborn, M.E.; Andersen, G.P.; Asmolova, O.; McHarg, M.G.; Nelson, H.C.; Quiller, T.S.; Harvey, T.J.; Murphey, T.W. A Deployable Membrane Telescope Payload for CubeSats. JoSS 2014, 3, 253–264. [Google Scholar]
- Hallibert, P.; Boquet, F.; Deslaef, N.; Sechi, G. Technologies for Large Ultra-Stable Optical Missions: Current Perspectives and Developments at ESA. In Proceedings of the Astronomical Optics: Design, Manufacture, and Test of Space and Ground Systems II, San Diego, CA, USA, 12–15 August 2019; Volume 11116, pp. 279–304. [Google Scholar] [CrossRef]
- Trumper, I.; Hallibert, P.; Arenberg, J.W.; Kunieda, H.; Guyon, O.; Stahl, H.P.; Kim, D.W. Optics Technology for Large-Aperture Space Telescopes: From Fabrication to Final Acceptance Tests. Adv. Opt. Photonics 2018, 10, 644–702. [Google Scholar] [CrossRef]
- Su, P.; Parks, R.E.; Wang, L.; Angel, R.P.; Burge, J.H. Software Configurable Optical Test System: A Computerized Reverse Hartmann Test. Appl. Opt. 2010, 49, 4404. [Google Scholar] [CrossRef] [PubMed]
- Su, P.; Wang, Y.; Burge, J.H.; Kaznatcheev, K.; Idir, M. Non-Null Full Field X-ray Mirror Metrology Using SCOTS: A Reflection Deflectometry Approach. Opt. Express 2012, 20, 12393. [Google Scholar] [CrossRef] [PubMed]
- Lowman, A.E.; Smith, G.A.; Harrison, L.; West, S.C.; Oh, C.J. Measurement of Large On-Axis and off-Axis Mirrors Using Software Configurable Optical Test System (SCOTS). In Proceedings of the Advances in Optical and Mechanical Technologies for Telescopes and Instrumentation III, Austin, TX, USA, 10–15 June 2018; Volume 10706, pp. 405–418. [Google Scholar] [CrossRef]
- Choi, J.N.; Ryu, D.; Kim, S.W.; Kim, D.W.; Su, P.; Huang, R.; Kim, Y.S.; Yang, H.S. Integrated Ray Tracing Simulation of the SCOTS Surface Measurement Test for the GMT Fast Steering Mirror Prototype. Adv. Space Res. 2015, 56, 2483–2494. [Google Scholar] [CrossRef]
- Nielsen, C.J.G. SCOTS—ComplexGeometry. Available online: https://github.com/nidlu/SCOTS-ComplexGeometry (accessed on 30 July 2023).
- Pathak, B.; Boruah, B.R. Improved Wavefront Reconstruction Algorithm for Shack–Hartmann Type Wavefront Sensors. J. Opt. 2014, 16, 055403. [Google Scholar] [CrossRef]
- Ye, J.; Gao, Z.; Wang, S.; Cheng, J.; Wang, W.; Sun, W. Comparative Assessment of Orthogonal Polynomials for Wavefront Reconstruction over the Square Aperture. JOSA A 2014, 31, 2304–2311. [Google Scholar] [CrossRef] [PubMed]
- Mochi, I.; Goldberg, K.A. Modal Wavefront Reconstruction from Its Gradient. Appl. Opt. 2015, 54, 3780–3785. [Google Scholar] [CrossRef]
- Landman, R.; Haffert, S.Y. Nonlinear Wavefront Reconstruction with Convolutional Neural Networks for Fourier-based Wavefront Sensors. Opt. Express 2020, 28, 16644–16657. [Google Scholar] [CrossRef] [PubMed]
- Yang, H.; Soloviev, O.; Verhaegen, M. Model-Based Wavefront Sensorless Adaptive Optics System for Large Aberrations and Extended Objects. Opt. Express 2015, 23, 24587–24601. [Google Scholar] [CrossRef] [PubMed]
- Géradin, M.; Rixen, D.J. Mechanical Vibrations: Theory and Application to Structural Dynamics; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Preumont, A. Twelve Lectures on Structural Dynamics. In Solid Mechanics and Its Applications; Springer: Dordrecht, The Netherlands, 2013; Volume 198. [Google Scholar] [CrossRef]
- Meakins, D.A.; Carr, M. Raysect/Source: V0.5.2 Release. Zenodo, 2018. Available online: https://zenodo.org/record/1341376 (accessed on 30 July 2023).
- 2D Weighted Phase Unwrapping. 2023. Available online: https://www.mathworks.com/matlabcentral/fileexchange/60345-2d-weighted-phase-unwrapping (accessed on 30 July 2023).
- Ghiglia, D.C.; Romero, L.A. Robust Two-Dimensional Weighted and Unweighted Phase Unwrapping That Uses Fast Transforms and Iterative Methods. JOSA A 1994, 11, 107–117. [Google Scholar] [CrossRef]
- Quéau, Y.; Durou, J.D.; Aujol, J.F. Variational Methods for Normal Integration. arXiv 2017, arXiv:1709.05965. [Google Scholar] [CrossRef]
- Quéau, Y. Codes_Integration. Available online: https://github.com/yqueau/normal_integration (accessed on 30 July 2023).
- Strang, G. Linear Algebra and Its Applications, 3rd ed.; Harcourt, Brace, Jovanovich, Publishers: San Diego, CA, USA, 1988. [Google Scholar]
- Buss, S.R. Introduction to Inverse Kinematics with Jacobian Transpose, Pseudoinverse and Damped Least Squares Methods. IEEE J. Robot. Autom. 2004, 17, 16. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geometric Change (Camera) | RMS Error |
|---|---|
| Nominal | 0.15 µ |
| X | 0.18 µ |
| Y | 0.17 µ |
| Z | 0.21 µ |
| 2° X | 0.65 µ |
| 2° Y | 1.18 µ |
| Modes | Equation (8) 0% | Slopes 0% | Slopes 30% |
|---|---|---|---|
| 50 | 1.52 × | 1.84 × | 3.47 × |
| 100 | 6.47 × | 6.47 × | 6.48 × |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nielsen, C.J.G.; Preumont, A. Adaptive Petal Reflector: In-Lab Software Configurable Optical Testing System Metrology and Modal Wavefront Reconstruction. Sensors 2023, 23, 7316. https://doi.org/10.3390/s23177316
Nielsen CJG, Preumont A. Adaptive Petal Reflector: In-Lab Software Configurable Optical Testing System Metrology and Modal Wavefront Reconstruction. Sensors. 2023; 23(17):7316. https://doi.org/10.3390/s23177316
Chicago/Turabian StyleNielsen, Carl Johan G., and André Preumont. 2023. "Adaptive Petal Reflector: In-Lab Software Configurable Optical Testing System Metrology and Modal Wavefront Reconstruction" Sensors 23, no. 17: 7316. https://doi.org/10.3390/s23177316
APA StyleNielsen, C. J. G., & Preumont, A. (2023). Adaptive Petal Reflector: In-Lab Software Configurable Optical Testing System Metrology and Modal Wavefront Reconstruction. Sensors, 23(17), 7316. https://doi.org/10.3390/s23177316