
On-Site Calibration of an Electric Drive: A Case Study Using a Multiphase System


 ,
,  and
and
Abstract
:1. Introduction
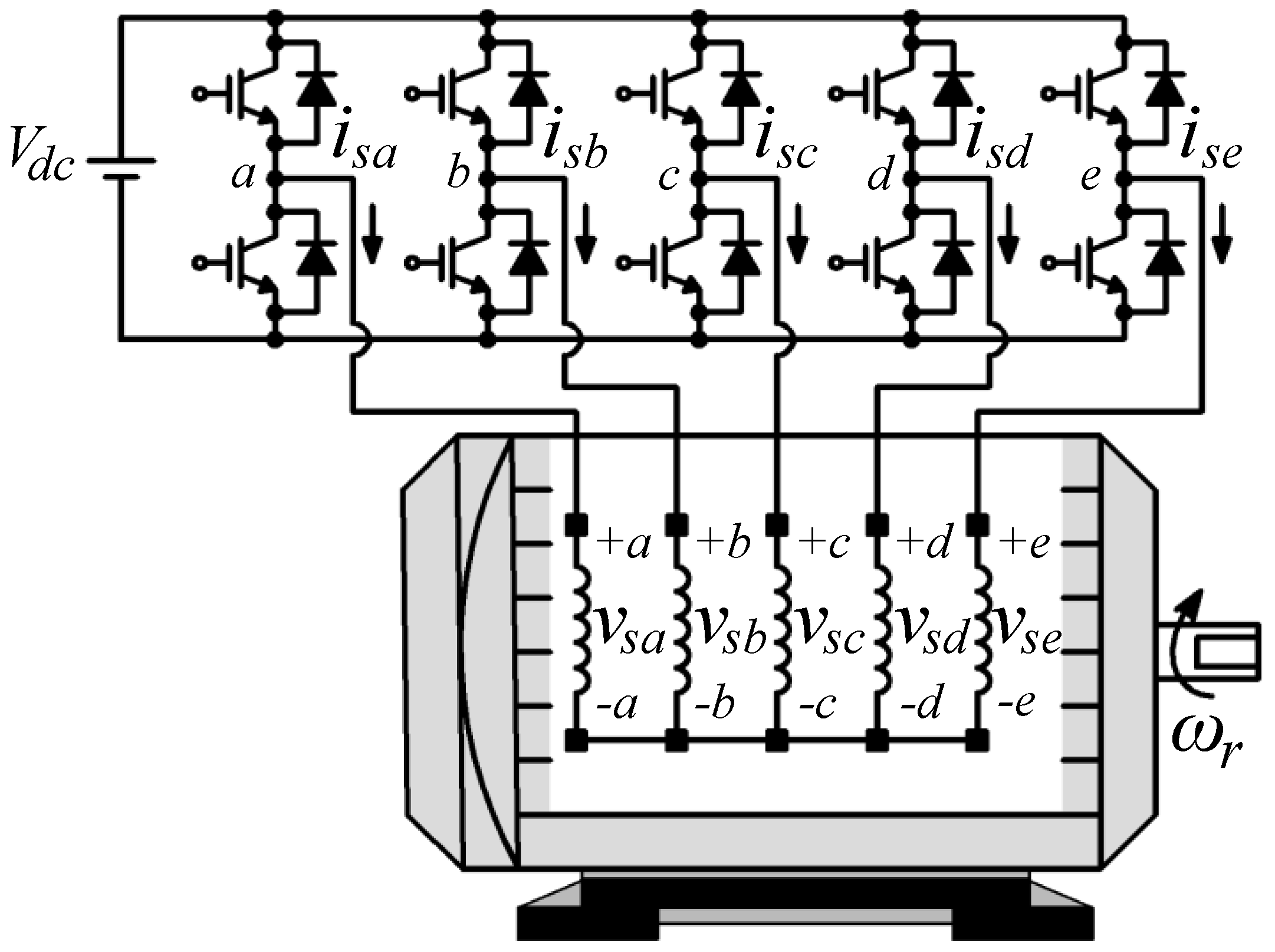
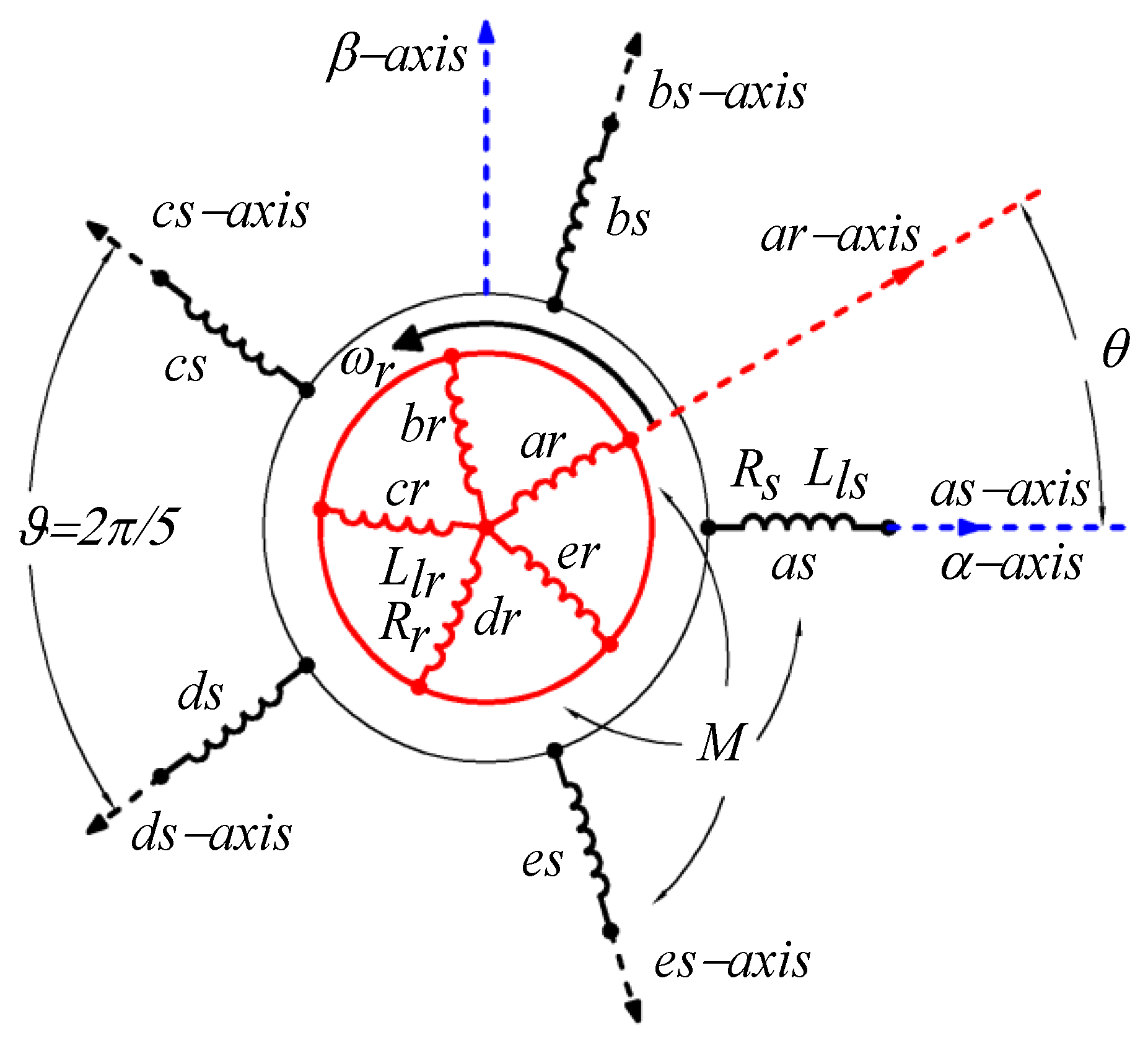
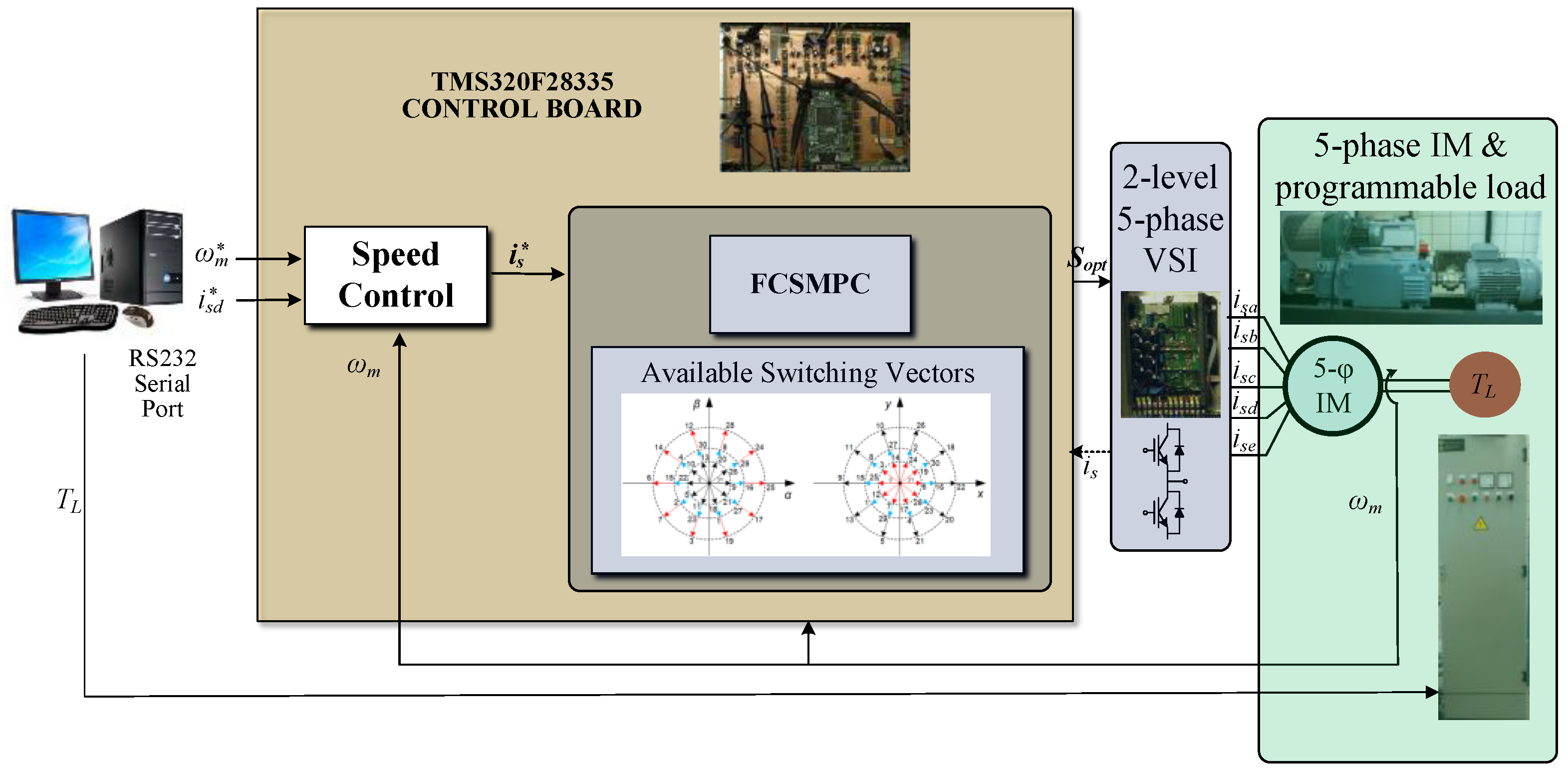
2. Basics of the Case Study
3. Calibration Procedures
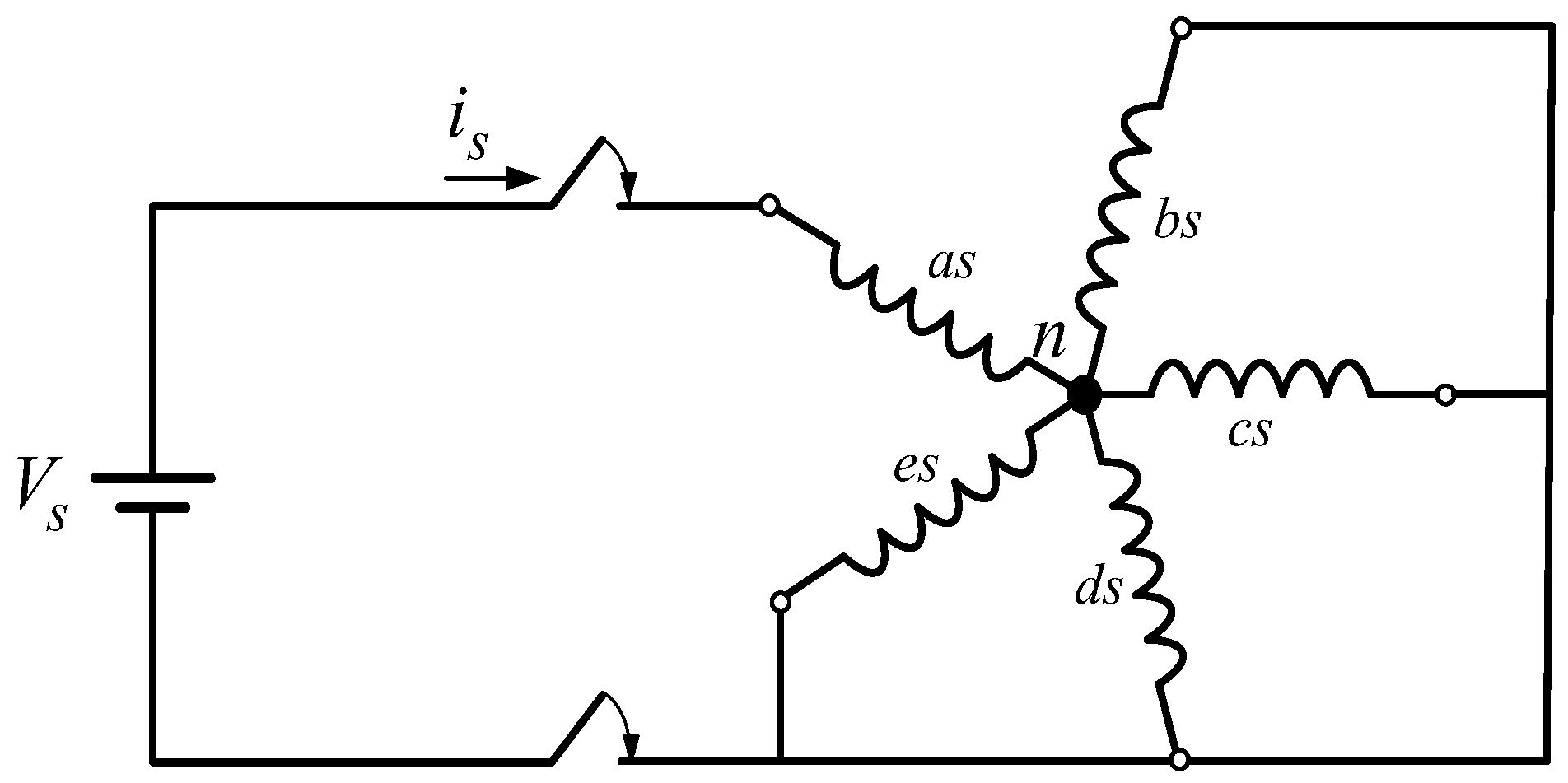
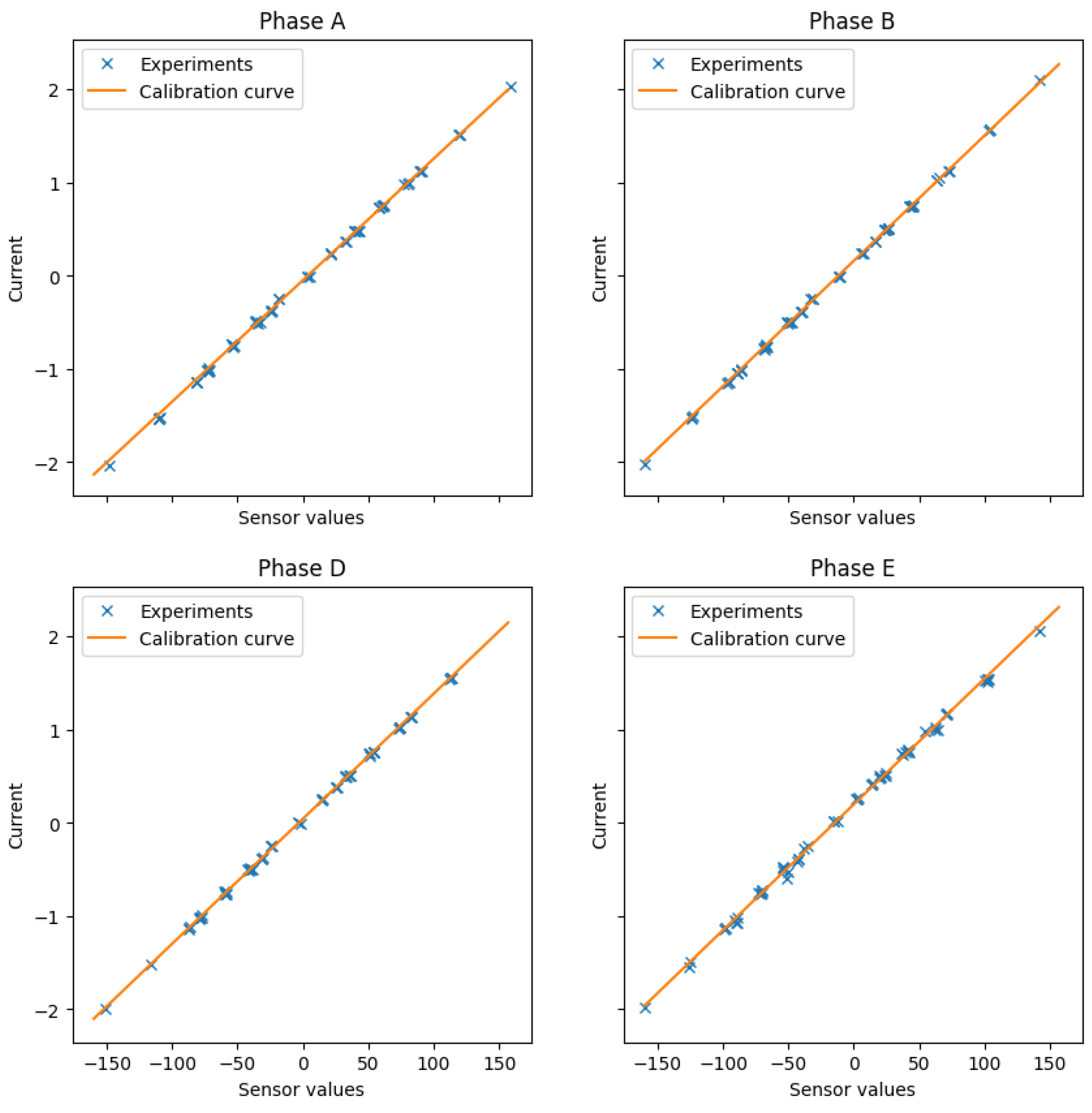
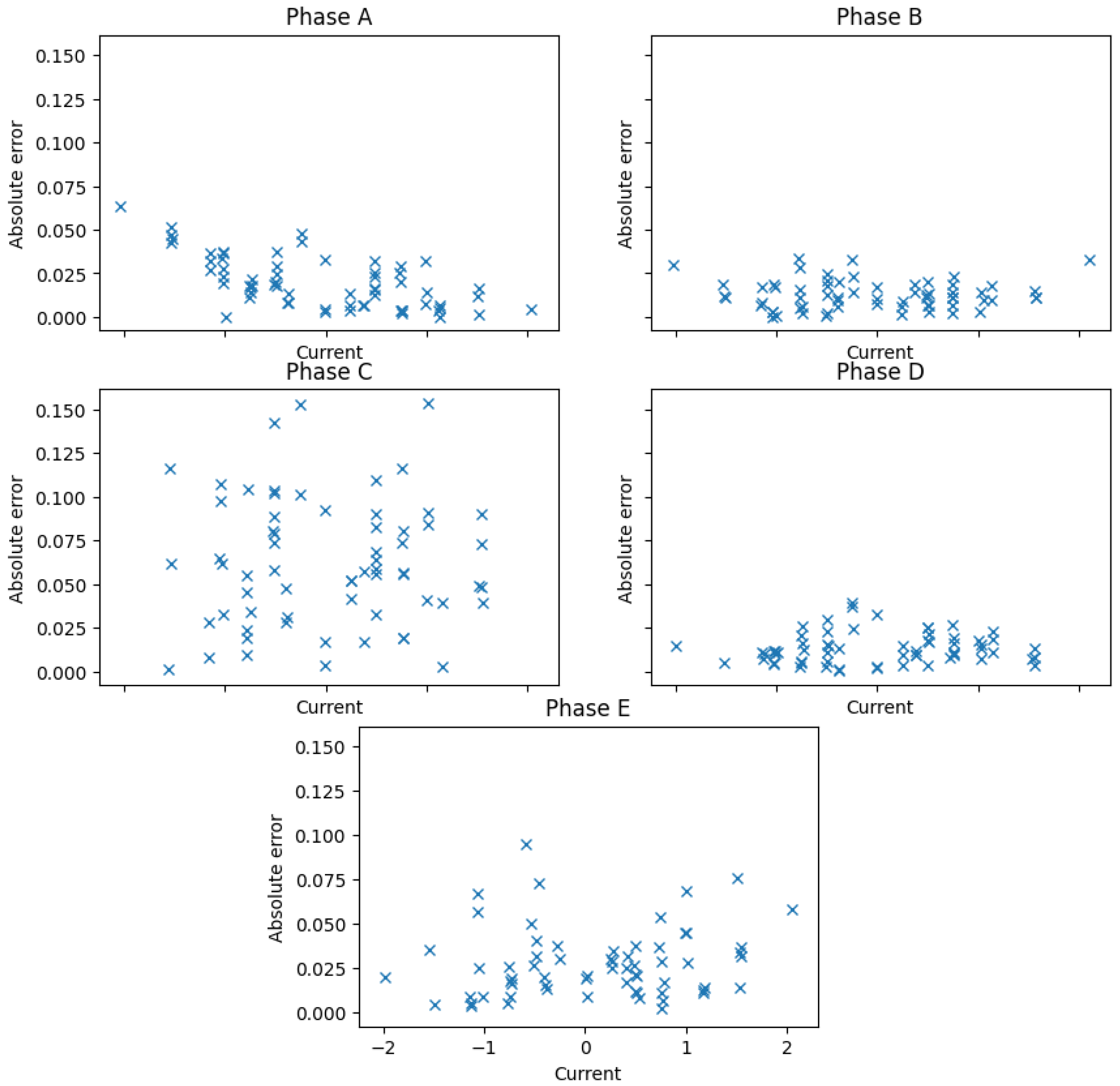
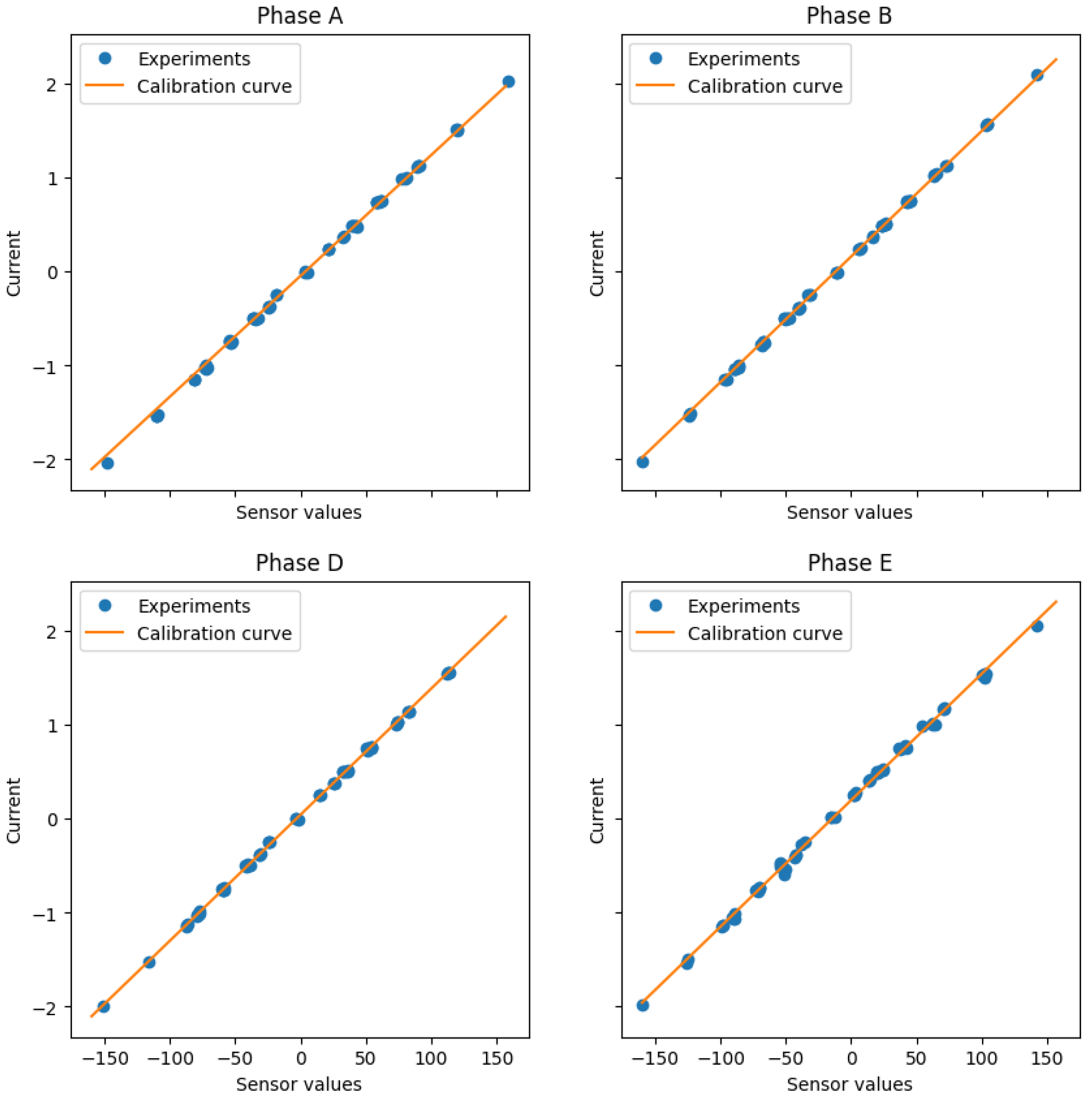
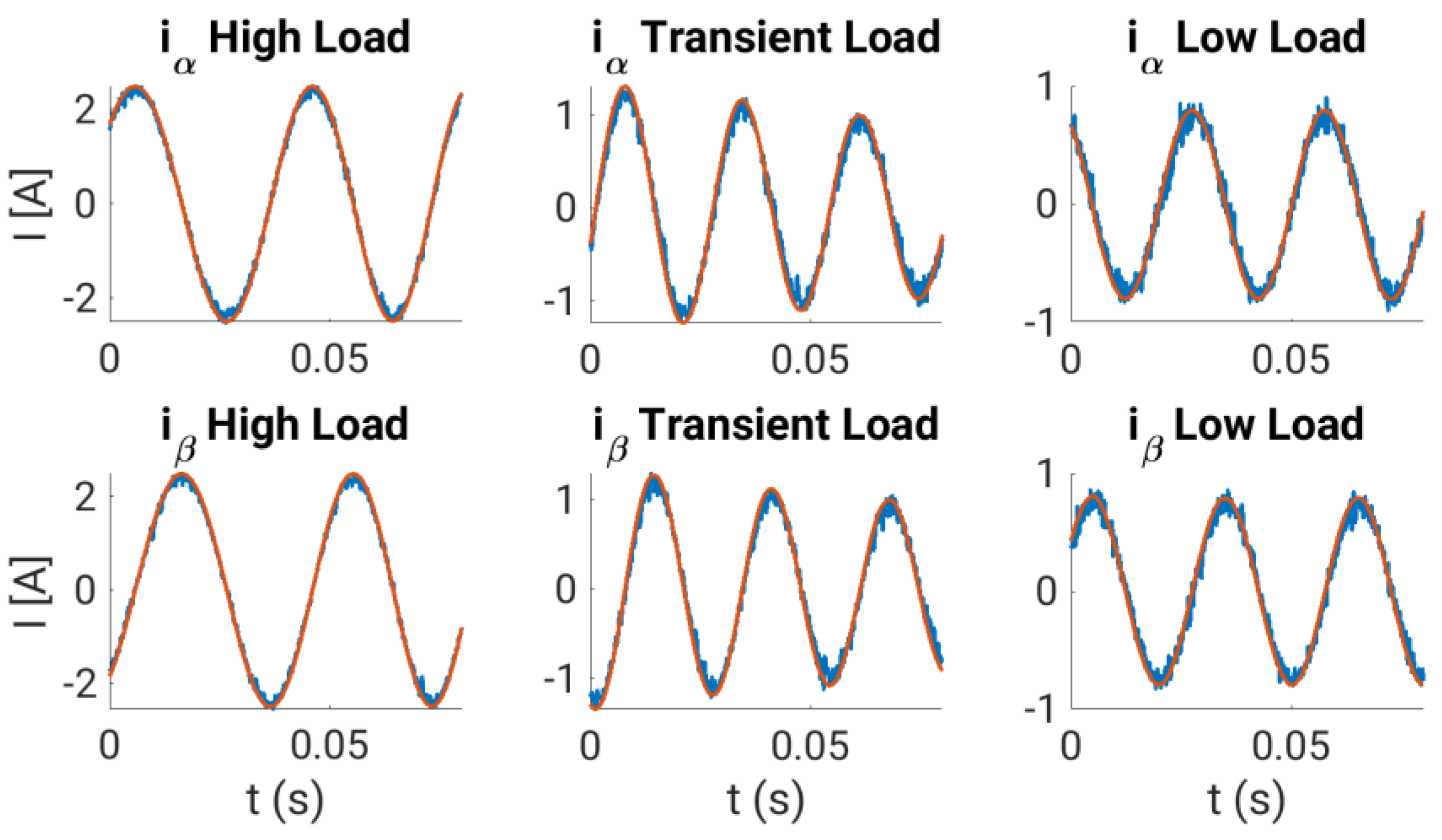
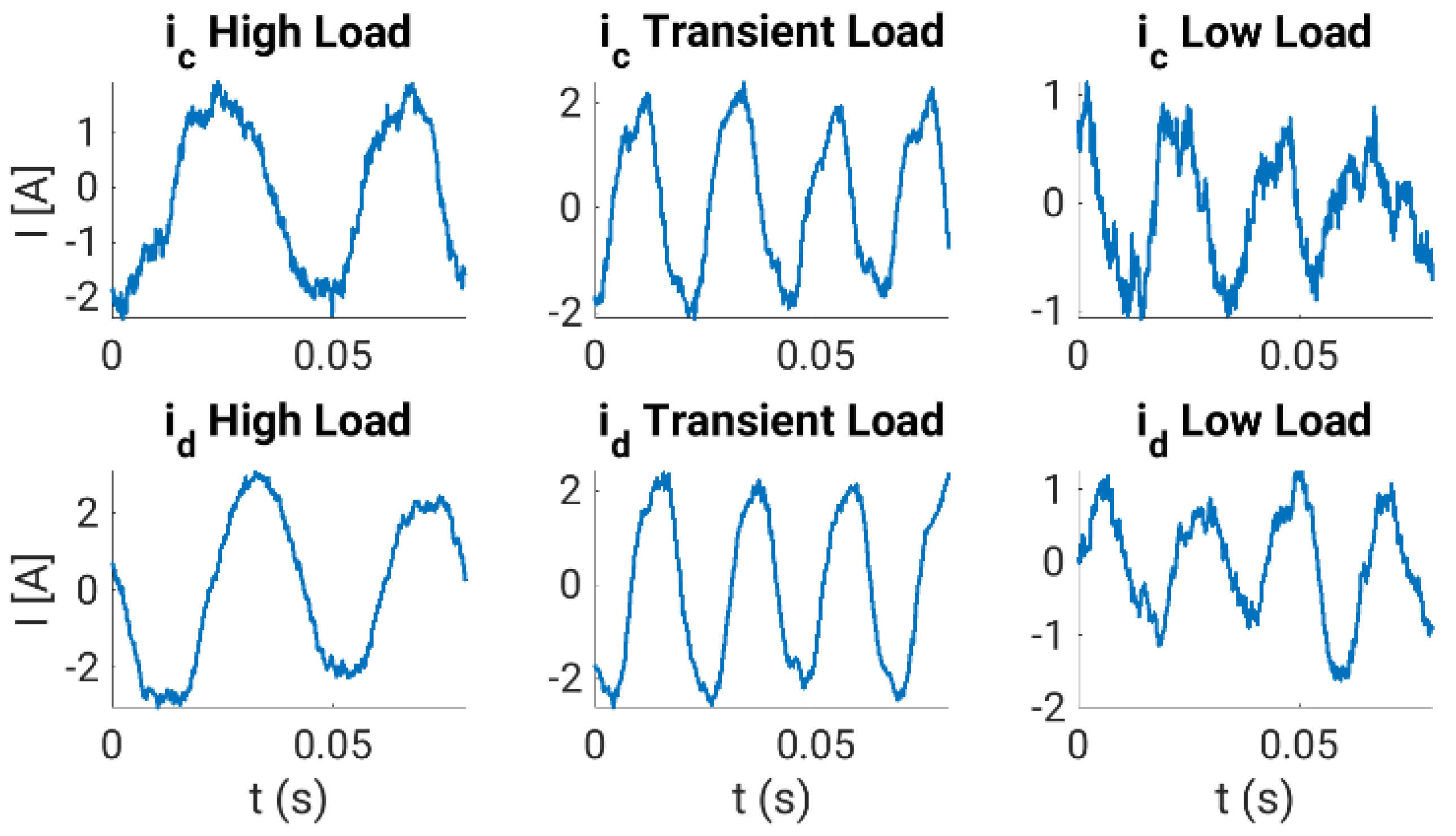
3.1. Calibration of Current Sensors
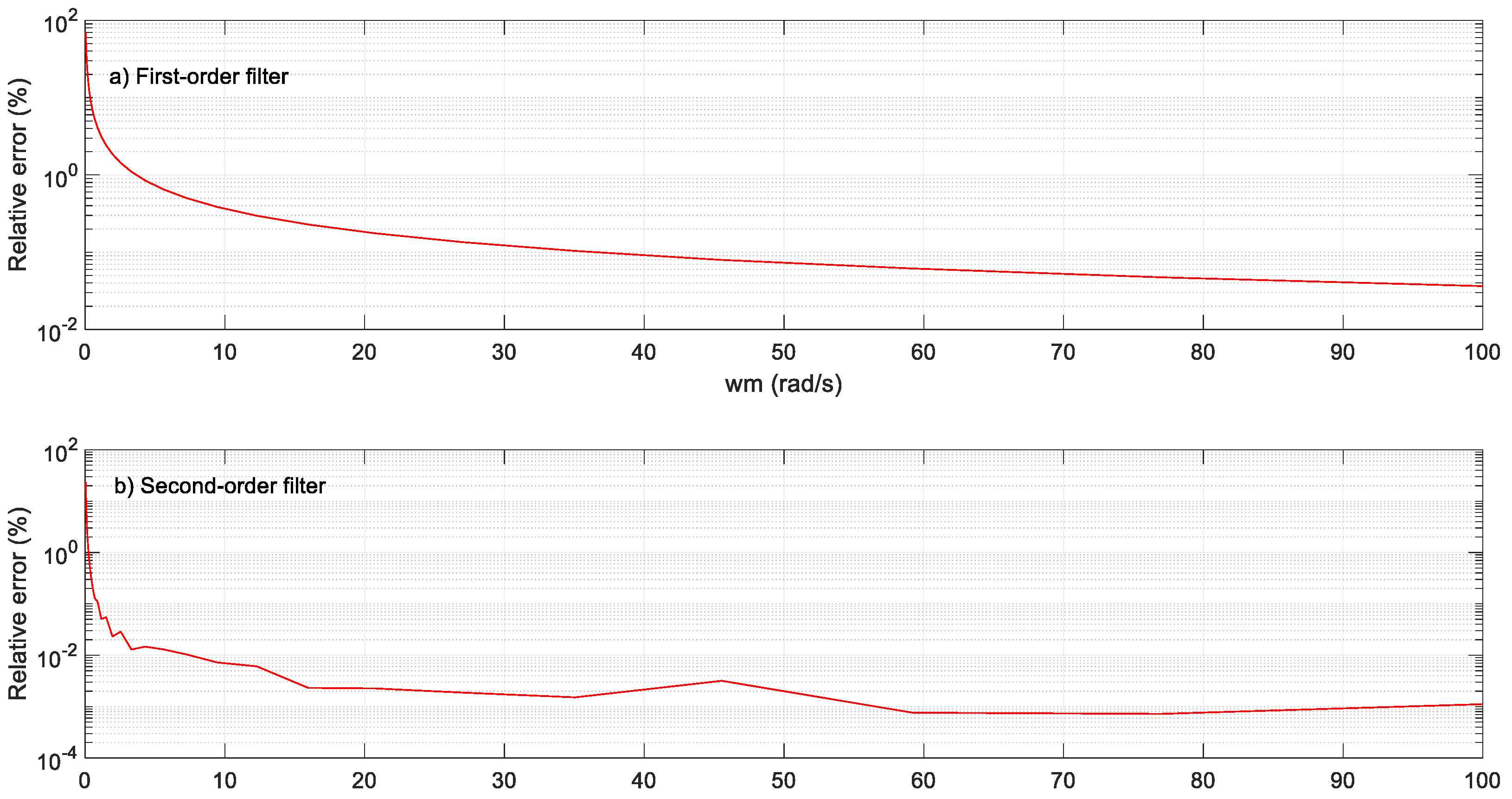
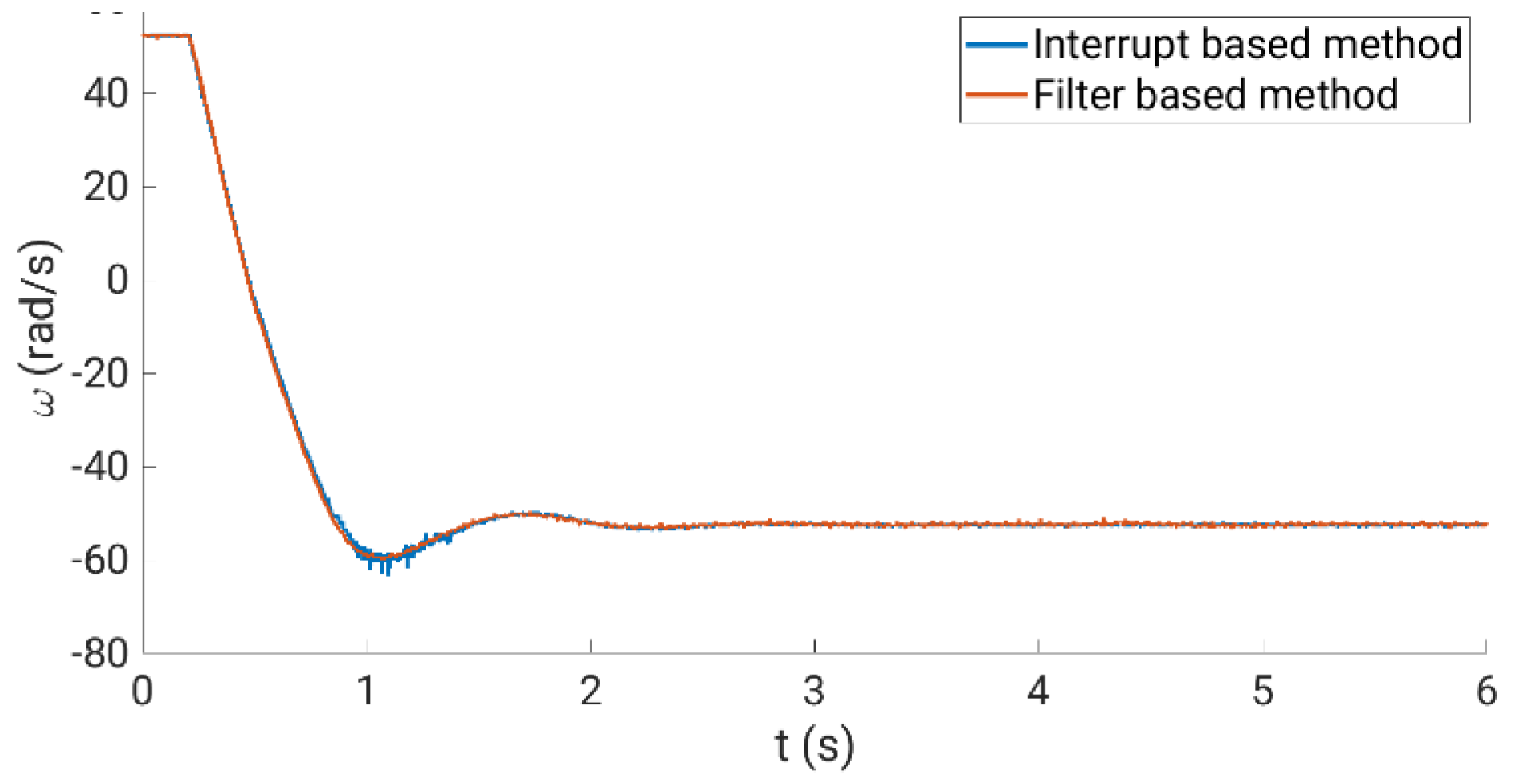
3.2. Calibration of the Speed Sensor
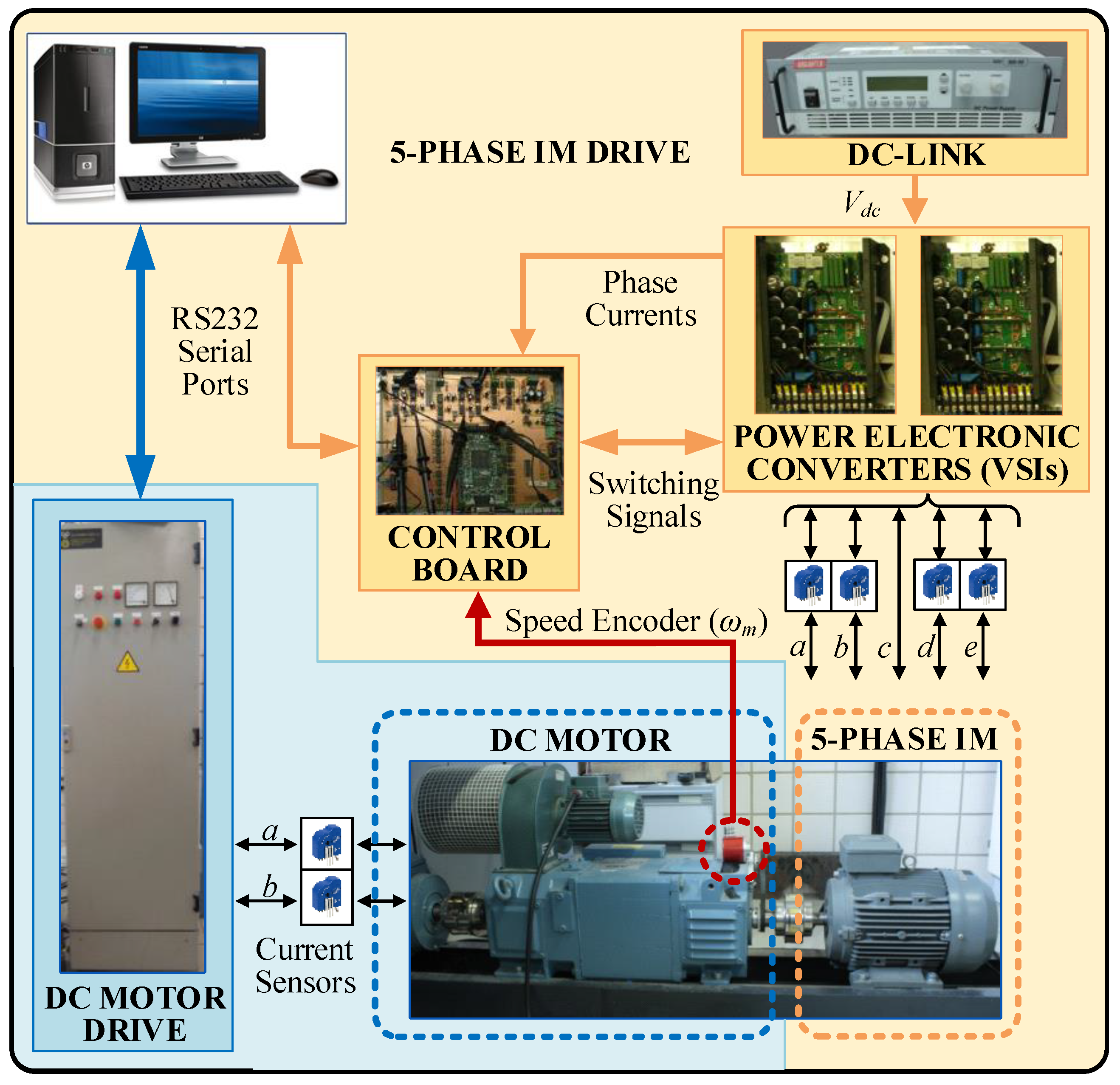
4. Verification Analysis Using the Experimental System
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liu, C. Emerging Electric Machines and Drives—An Overview. IEEE Trans. Energy Convers. 2018, 33, 2270–2280. [Google Scholar] [CrossRef]
- Duran, M.J.; Levi, E.; Barrero, F. Multiphase Electric Drives: Introduction. In Wiley Encyclopedia of Electrical and Electronics Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2017; pp. 1–26. [Google Scholar]
- Barrero, F.; Duran, M.J. Recent advances in the design, modeling and control of multiphase machines—Part I. IEEE Trans. Ind. Electron. 2016, 63, 449–458. [Google Scholar] [CrossRef]
- Duran, M.J.; Barrero, F. Recent advances in the design, modeling and control of multiphase machines—Part II. IEEE Trans. Ind. Electron. 2016, 63, 459–468. [Google Scholar] [CrossRef]
- Arahal, M.R.; Barrero, F.; Satué, M.G.; Bermudez, M. Fast Finite-State Predictive Current Control of Electric Drives. IEEE Access 2023, 11, 12821–12828. [Google Scholar] [CrossRef]
- Frikha, M.A.; Croonen, J.; Deepak, K.; Benômar, Y.; El Baghdadi, M.; Hegazy, O. Multiphase Motors and Drive Systems for Electric Vehicle Powertrains: State of the Art Analysis and Future Trends. Energies 2023, 16, 768. [Google Scholar] [CrossRef]
- Li, S.; Frey, M.; Gauterin, F. Model-Based Condition Monitoring of the Sensors and Actuators of an Electric and Automated Vehicle. Sensors 2023, 23, 887. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.F.; Dwivedi, S.K. Modeling, Simulation and Control of Electrical Drives (Control, Robotics and Sensors); IET Press: London, UK, 2019. [Google Scholar]
- Korzonek, M.; Tarchala, G.; Orlowska-Kowalska, T. A review on MRAS-type Speed Estimators for Reliable and Efficient Induction Motor Drives. ISA Trans. 2019, 93, 1–13. [Google Scholar] [CrossRef] [PubMed]
- Mohan, H.; Pathak, M.K.; Dwivedi, S.K. Sensorless Control of Electric Drives—A Technological Review. IETE Tech. Rev. 2020, 37, 1–25. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Mohammed, S.A.Q. Experimental Evaluation of Predictive Torque Control of IPMSM under Speed Sensor and Sensorless Extended EMF Method. Electronics 2023, 12, 68. [Google Scholar] [CrossRef]
- Lu, H.; Li, S.; Feng, B.; Li, J. An Enhanced Sensorless Control based on Active Disturbance Rejection Controller for a PMSM System: Design and Hardware Implementation. Assem. Autom. 2022, 42, 445–457. [Google Scholar] [CrossRef]
- Lu, J.; Hu, Y.; Chen, G.; Wang, Z.; Liu, J. Mutual Calibration of Multiple Current Sensors With Accuracy Uncertainties in IPMSM Drives for Electric Vehicles. IEEE Trans. Ind. Electron. 2020, 67, 69–79. [Google Scholar] [CrossRef]
- Warg, E.E.; Härer, H. Preliminary investigation of an inverter-fed 5-phase induction motor. Proc. Inst. Electr. Eng. 1969, 116, 980–984. [Google Scholar]
- Martín-Torres, C.; Bermúdez, M.; Barrero, F.; Arahal, M.R.; Kestelyn, X.; Durán, M.J. Sensitivity of Predictive Controllers to Parameter Variation in Five-Phase Induction Motor Drives. Control Eng. Pract. 2017, 68, 23–31. [Google Scholar] [CrossRef]
- Anuchin, A.; Podzorova, V.; Kazemirova, Y.; Chen, H.; Lashkevich, M.; Savkin, D.; Demidova, G. Speed Measurement for Incremental Position Encoder Using Period-Based Method With Sinc3 Filtering. IEEE Sens. J. 2023, 23, 5073–5083. [Google Scholar] [CrossRef]
- Anuchin, A.; Dianov, A.; Briz, F. Synchronous Constant Elapsed Time Speed Estimation Using Incremental Encoders. IEEE/ASME Trans. Mechatron. 2019, 24, 1893–1901. [Google Scholar] [CrossRef]
- Bermúdez, M.; Martín-Torres, C.; González-Prieto, I.; Duran, M.J.; Arahal, M.R.; Barrero, F. Predictive current control in electrical drives: An illustrated review with case examples using a five-phase induction motor drive with distributed windings. IET Electr. Power Appl. 2020, 14, 1291–1310. [Google Scholar] [CrossRef]
- Norsworthy, S.R.; Schreier, R.; Temes, G.C. Delta-Sigma Data Converters; IEEE Press: New York, NY, USA, 1997. [Google Scholar]
- Hovin, M.; Olsen, A.; Lande, T.S.; Toumazou, C. Delta-Sigma modulators using frequency-modulated intermediate values. IEEE J. Solid-State Circuits 1997, 32, 13–22. [Google Scholar] [CrossRef]
- Kim, J.; Jang, T.K.; Yoon, Y.G.; Cho, S. Analysis and design of voltage-controlled oscillator based analog-to-digital converter. IEEE Trans. Circuits Syst. I 2010, 57, 18–30. [Google Scholar]
- Colodro, F.; Torralba, A. Frequency-to-Digital conversion based on a sampled Phase-Locked Loop. Microelectron. J. 2013, 44, 880–887. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Parameter | Value/Description |
|---|---|---|
| Rated current (Arms) | 7.13 | |
| Original nameplate data | Rated power (kW) | 4 |
| Rated speed (r/min) | 2880 | |
| Conductor | Copper | |
| Diameter (mm) | 0.7 | |
| Number of pole pairs | 3 | |
| Rewinding data | Number of slots | 30 |
| Number of turns | 165 | |
| Type of windings | Single-layer | |
| Winding pitch | 5 slots (full pitch) | |
| Stator resistance, Rs | 12.85 Ω | |
| Rotor resistance, Rr | 4.80 Ω | |
| Electrical parameters | Stator leakage inductance, Lls | 79.93 mH |
| Rotor leakage inductance, Llr | 79.93 mH | |
| Mutual inductance, M | 681.7 mH | |
| Mechanical parameter | Rotational inertia, Jm | 0.02 kg-m2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Soto-Marchena, D.; Barrero, F.; Colodro, F.; Arahal, M.R.; Mora, J.L. On-Site Calibration of an Electric Drive: A Case Study Using a Multiphase System. Sensors 2023, 23, 7317. https://doi.org/10.3390/s23177317
Soto-Marchena D, Barrero F, Colodro F, Arahal MR, Mora JL. On-Site Calibration of an Electric Drive: A Case Study Using a Multiphase System. Sensors. 2023; 23(17):7317. https://doi.org/10.3390/s23177317
Chicago/Turabian StyleSoto-Marchena, David, Federico Barrero, Francisco Colodro, Manuel R. Arahal, and Jose L. Mora. 2023. "On-Site Calibration of an Electric Drive: A Case Study Using a Multiphase System" Sensors 23, no. 17: 7317. https://doi.org/10.3390/s23177317
APA StyleSoto-Marchena, D., Barrero, F., Colodro, F., Arahal, M. R., & Mora, J. L. (2023). On-Site Calibration of an Electric Drive: A Case Study Using a Multiphase System. Sensors, 23(17), 7317. https://doi.org/10.3390/s23177317