1. Introduction
Unmanned vehicles are developed to operate in various environments, including those operating on the surface of the water, known as unmanned surface vehicles (USVs) [
1], those operating in the air as unmanned aerial vehicles (UAVs) [
2], and those that operate underwater as unmanned underwater vehicles (UUVs). Currently, UUVs are growing in communication, control systems, and automation, and are even using Machine Learning processes such as setting trajectories, sensing, and managing flocks of unmanned vehicles [
3].
As compared to unmanned vehicles that operate on the ground and those that operate in the air, which are able to access wireless communication systems properly, the conditions for unmanned vehicles that operate on the ground are different. This is due to the reliability of air in transmitting communication signals, especially with relay technology and shared resource management [
4]. In spite of the fact that there are several disturbances, fault handling, recovery, and fault management can still be used to handle them [
5]. Meanwhile, UUVs are affected by fluid properties, which interfere with signal propagation [
6]. Furthermore, the energy required to transmit the signal is relatively high [
7], whereas the signal received is lower, resulting in the loss of large data [
6,
8].
The underwater communication technologies can be categorized into five models: (1) acoustic communication that uses sound waves as a communication signal [
9]; (2) optical communication uses visible and invisible light waves [
10]; (3) wireless communication via radio waves [
11]; (4) Satellite communication communicates with devices in the water through intermediary relays on the surface [
12]; (5) direct electrical communication used for UUV charging docks [
13,
14].
There are four indicators that can be used to measure communication effectiveness: bit-error-rate (BER); signal-to-noise ratio (SNR) in decibels (dB); spectral efficiency, which is decrypted as the number of bits per second that can be transmitted through a specific bandwidth unit (bps/Hz); and energy efficiency. Specific propagation loss coefficient and noise floor are employed for different signal frequencies, as well as water characteristics (such as temperature, salinity, and depth) [
6]. The signal-to-noise ratio measures the strength of the signal compared to the background noise. Better communication conditions are indicated by a higher SNR.
The propulsion system and dive system allow the UUV to move and control its depth in the water [
15]. To propel the vehicle through the viscosity of water, one or more thrusters are used [
16,
17]. The propulsion system also controls the vehicle’s buoyancy, usually using a ballast system, which absorbs or releases water to regulate the vehicle’s buoyancy, as well as control systems to control dives and ascents [
18]. UUVs can also be propelled by wings, fins, and hydrojets [
19,
20,
21,
22].
Five types of UUVs are considered in the control system, which focuses on control algorithms: the first is proportional–integral–derivative (PID) [
23], which utilizes sensor feedback and processes it proportionally, integrally, and derivatively. Integrational means accumulating the errors over time and adjusting the control output based on those errors, while proportional means comparing; for example, comparing the output with the desired output. Derivative means calculating the error rate and adjusting the output based on that rate. The second type, model predictive control (MPC), predicts the future behavior of the system [
24]. It uses a mathematical technique called sliding mode to achieve robust control of a system, regardless of variations in its dynamics or disturbances in the environment. Sliding mode control or SMC is a third method [
25]. Fourth, adaptive control (AC) uses a mathematical model of the system to estimate the current state of the system [
26] and then adjusts the control inputs accordingly. Last but not least, adjusting UUV trajectory [
27] or UUV herd localization uses Artificial Intelligence and Machine Learning (ML) [
28]. Control algorithms are chosen based on the application and the requirements given, but there are a number of testing models that can be used, including (1) simulation; (2) closed-loop testing; (3) comparison with other algorithms; and (4) measuring key performance indicators (KPIs).
UUV uses several sensor devices in environmental sensing and recognition systems, and they are grouped based on how they work into four types: acoustic-sensors, such as sound navigation and ranging (SONAR) [
29] and hydrophones [
30], that detect and locate objects in water using sound waves; optical sensors, such as cameras and light detection and ranging (LiDAR) [
31,
32], that use light waves to capture images and gather data on the surface of the water; chemical-sensors [
33], which can detect and measure the concentration of dissolved gases, pollutants, and other substances in the water [
34]; and physical-sensors [
35], which can detect and measure the properties of water and its surroundings. Using these four types of sensors together can provide a comprehensive picture of the underwater environment for navigation, object detection, and environmental monitoring. As a result of the sensing function, UUV operations can be conducted to collect various types of data, such as bathymetry [
36], water quality [
32], images of the seafloor [
32], etc., depending on the mission and the sensors and instruments installed on the vehicle.
Several types of navigation systems can be used by unmanned vehicles underwater, including inertial navigation systems (INS) which use accelerometers and gyroscope sensors to measure linear and angular motion, and once the angular position and orientation are known, the location of the UUV can be estimated [
37,
38]. Another application using similar measurement data is the Doppler velocity log (DVL), which measures the relative velocity of UUV to water by using the theory of the Doppler effect [
39,
40,
41,
42]. Furthermore, the third system is the use of the global navigation satellite system (GNSS) and global positioning system (GPS) which utilize satellite signals to determine UUV position and speed [
43] based on the difference between a signal transmitted by a satellite and a signal received by a GPS receiver. In addition, the GNSS system transmits longitude, latitude, altitude and time signals simultaneously [
44,
45,
46]. Currently GPS/GNSS technology can only be used for vehicles operating in the sea surface environment, such as the Vessel UUV, and further research is needed in order to apply it to the underwater environment. Furthermore, the fourth system introduced in this paper is the use of sound waves to determine the position and speed of the UUV using an acoustic navigation system (ANS) [
47]. Acoustic signals can be measured by measuring the time delay or the Doppler shift [
48]. To track the position and orientation of the UUV, the last or fifth system is the use of visual odometry (VO) [
49]. UUV localization optimization can be improved by integrating navigation systems, various sensors, and other data sources, as mentioned above. In summary, the key point is that GNSS can provide absolute position measurements, while INS and DVL can provide accurate speed measurements. This integration is referred to as sensor fusion, i.e., when sensors and data sources are integrated in one unit.
The primary source of energy for most unmanned underwater vehicle is batteries [
50]. Depending on the specific application and mission requirements, these batteries can be rechargeable or disposable. UUVs have also used fuel cells [
51], hydrogen [
52], and solar panels [
53], which require cooperative control systems to harvest solar energy continuously if the energy source battery backup is low. The UUV’s energy requirements and supply will be determined by the specific mission and operating conditions, such as mission duration, water depth, and payload type.
Additionally, several studies predict an increase in demand for underwater vehicles in the future [
54,
55]. The underwater wireless sensor network (UWSN) [
56] infrastructure is also being utilized to support the continuity of operation of the UUV which has limitations when operating in water. Because it is supported by air–water boundary communication technology (AWBC) [
57,
58] and underwater cyber physical system (UCPS) for data collection needs [
59,
60], it is possible to collaborate on communication and control systems [
57,
58] for multi-environmental unmanned vehicles. Internet of Underwater Things or (IoUT) localization techniques based on reinforcement learning [
61] can be used in collaboration with vessel-based UUVs to collect marine survey information [
62]. Several other studies, such as those based on controversy adjudication (CATM) [
63], are expected to further improve the effectiveness of UUV operations underwater and eliminate its limitations [
64].
While the poor supporting technology in the underwater environment has implications for many things, including difficulties controlling the UUV, reduced situational awareness, difficulty executing missions, and the risk of losing the UUV [
54], reliable supporting technology is urgently needed. Furthermore, the entire discussion outlined above opens this survey paper and invites readers to better understand the concept of unmanned vehicles operating underwater, as well as the importance of technological support.
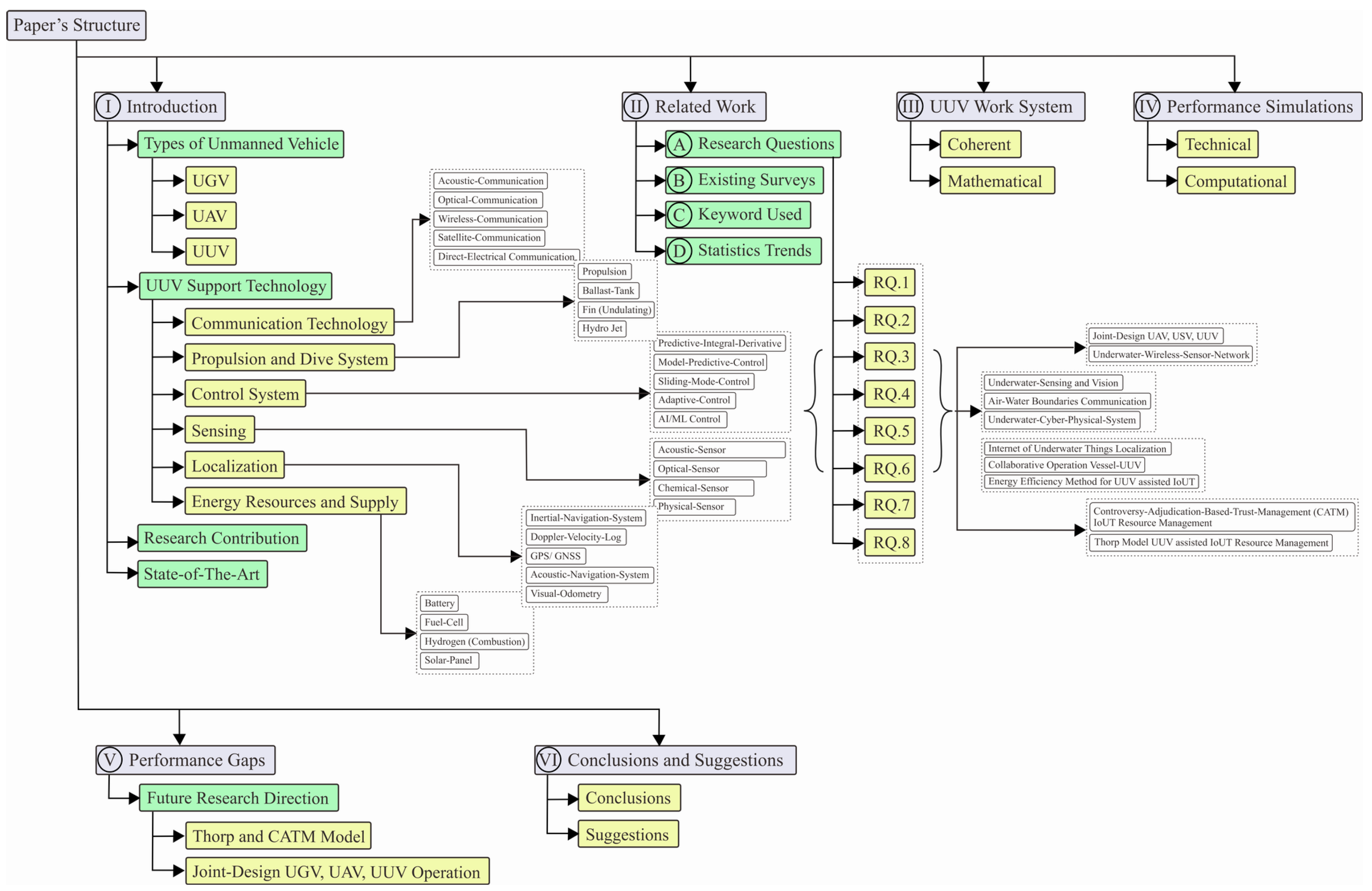
This paper employs state-of-the-art writing, which flows and makes it easy for readers to read, including an introduction, which provides information about unmanned vehicles, their types, communication technology, propulsion and dive systems, control systems, sensors, localization, energy resources, and supplies that support the operation of UUVs under water. It explains the workings of the supporting technology from a technical and a mathematical perspective. We also explain how the literacy survey was conducted, starting with frequently asked research questions, statistical trends, and the keywords used to find articles that support the general and specific statements.
An integrated mathematical approach is then used to discuss the work system of each UUV-supporting technology, including communication technology, propulsion, control systems, sensing, localization, and energy resources. Next, through simulations, the performance of technology supporting UUV operations is simulated. Then, we examine the performance gaps found in research in supporting technology performance, discussing the latest issues such as the implementation of the Thorp model for the distribution of shared resources for communication and energy, as well as a joint-design of USV–UAV–UUV operations for completing a mission that requires future research contributions. Finally, we outline several critical open research challenges for future studies.
The paper is organized as follows: an introduction that covers types of unmanned vehicles, UUV support technology, research contributions, and the state of the art. This is followed by a discussion of related works, including research questions, existing surveys, and statistical trends. Next, a coherent and mathematical approach is used to discuss the UUV work system and conduct a performance simulation. The paper concludes with a discussion on future research directions and a summary of the performance gaps found.
Recent research advances in the field of underwater vehicles encompass various aspects, including sensing, cross-boundary cooperation patterns of autonomous vehicles, optimization of cross-boundary communication utilizing signal propagation theories within water and signal modulation engineering, the adoption of successful models from autonomous vehicle types operating in terrestrial-aerial environments, and the incorporation of deep learning and deterministic Artificial Intelligence technologies. Collectively, these aspects represent future research avenues that can be developed based on what the researcher has presented in this review.
Figure 1 shows the structure of this survey paper more detail.
4. UUV Work System
A mission scenario illustrates how an unmanned vehicle works in an underwater environment.
4.1. Underwater Commmunication
In communication systems that use the hexagonal model for localization (buoy) as a ground station transmitter relay, the hexagonal model represents the sphere-shaped Earth, which is mathematically divisible by the hexagonal model. Relay placement by measuring the effective beacon distance is calculated as follows [
67]:
Network coverage ratio is represented by C, summazation volume monitoring area is denoted by V, and monitoring area of node is denoted as . It is assumed that the nodes are equipped with an omidirectional antenna that monitors in all directions (sphere area) which has a radius and is denoted in .
The signal transmission system uses a combination of acoustic communication for long-distance transmission at sea depth [
9], optical for fast short-range communication in the depths of the sea [
10], and radio waves for communication at sea level between the USV, relay station, and ground transmitting station [
11]. Additionally, the USV is equipped with a direct electrical [
13,
14] system that allows for the recharging of UUV swarms operating underwater and a swarm drone carrier with an air–water boundary communication system [
29]. Repeating the previous statement that a higher SNR ratio indicates better communication conditions, to calculate the SNR value [
29], we proceed with the following:
where
is the received light intensity and
is the variance of noise within the system.
can be represented as
In the context of the study, the following terms are defined:
I represents turbulence-induced channel fading, following a lognormal distribution;
and
denote temperature and channel loss, respectively;
represents irradiance in the pattern of ideal emission;
is the incident angle of the receiving plane; and
A represents the active area of the photodiode.
In the given context, the following terms are defined: q is the charge of an electron; represents the solar noise power, B denotes the signal bandwidth; and ℜ is the responsivity of the photodiode.
4.2. Dive System
A herd of UUVs in the mission scenario consists of three types, each distinguished by its propulsion and dive system. The first UUV is propelled by propellers on all sides, referred to as omnidirectional [
15,
16,
17], and is able to move in any direction to maximize its efficiency. The Buoyancy force generated by the object expressed in newton
,
can be represented as:
where
is the mathematical constant pi, approximately equal to 3.14159;
is the density of water expressed in (kg/m
3);
is the outer diameter of the submerged object expressed in meters (m); and
L is the length of the submerged object expressed in meters (m).
The origin axis of the vehicle is located at the middle of the
x–
y axis and at the bottom of the
z-axis. To calculate the center of gravity with respect to the origin axis, the following formula can be used:
The following terms are defined in the context of the study:
,
,
,
,
, and
,
,
represent the weight component, added weight by ballast water, offset of the center of weight component, and added weight component, respectively. For UUVs that utilize an omnidirectional dive system, a visual representation of the system can be observed in
Figure 3a.
The second type of UUV uses a hydrojet propulsion system and diving system [
22]. Known as a cross-domain vehicle (CDV), this vehicle can operate in both surface and underwater environments because it is equipped with a ballast tank, propulsion system, and rudder. The buoyancy law [
68] is used in this approach, which is based on:
In the given context, the following terms are defined: represents the net buoyancy in ; denotes the gravitational force; represents the buoyant force exerted by the fluid on the floating object; M is the total mass of the object; ∇ denotes the volume of the fluid displaced by the object; and is the density of the fluid. The rudder is responsible for directing the CDV into three modes of motion, as outlined below.
Dynamic model of surface state:
Dynamic model of the underwater state:
Underwater and surface transition state:
Table 5 provides detailed information regarding each symbol and unit. An illustration of a UUV that uses a propulsion system and hydrojet diving is shown in
Figure 3b, while
Figure 3c illustrates movement maneuvers resulting from the three equations above.
Futhermore, a third type of UUV is the undulating UUV; this means that the UUV is equipped with fins that function simultaneously as a propulsion and diving system. In their study, the authors provided a comprehensive account of the intricate six-degrees-of-freedom (DOF) motion exhibited by the manta ray robot [
21]. This encompassing movement involves a spectrum of displacements including longitudinal, sideways, and vertical shifts, in addition to the nuanced roll, pitch, and yaw rotations. The manta ray robot’s overall motion finds representation through elegant flowing vectors:
,
, and
. Here,
captures the vector describing the robot’s position and attitude in the earth-fixed frame, while
v characterizes the body-fixed linear and angular velocity vector. The intricate interplay of forces and moments acting on the robot within the body-fixed frame is succinctly described by
, as depicted in
Figure 4. By assuming the robot’s movement takes place in an ideal fluid at a consistent velocity of
and by disregarding the effects of water’s viscosity and inertia, the equations governing the robot’s motion are elegantly simplified, particularly in the vertical plane.
The intricate interplay of forces and factors influencing the manta ray robot’s behavior is encapsulated by a set of key variables. These include
G, representing the robot’s gravitational force;
, which captures the robot’s gravity in the absence of the mass block; and
, signifying the gravitational impact of the mass block itself. Furthermore, the buoyant forces at play are delineated by
B, indicating general buoyancy;
, reflecting the buoyancy when equated to the robot’s gravity; and
, representing an adjustable buoyancy component. Within this fluid dynamic context,
and
step forward as vital descriptors of fluid resistances acting along the
x-axis. The fundamental physical attributes of the robot and its environment are given voice by
m denoting the robot’s mass and
standing for the water density. The geometric characteristics of the robot are encapsulated by
and
, the maximum transverse and longitudinal cross-sectional areas, while the nuanced hydrodynamics are unveiled by
and
, the hydrodynamic parameters that contribute to the robot’s interaction with its surroundings. Each of these variables weaves together to define the intricate dance of forces and dynamics that shape the manta ray robot’s journey. Refer to
Figure 3d for a visualization of the propulsion and undulating diving system.
4.3. Control
The first drone used a model-predictive-control algorithm to set the maneuvers and trajectory of the herd UUV, which predicts future behavior and optimizes a control action based on that prediction. According to Saback et al. [
24] and Heshmati-Alamdari et al. [
68], whose logic flow employs a discrete-time form:
where
represents the state vector at time step
k, which includes the position and orientation of the vehicle with respect to the inertial frame
, and the relative linear and angular velocity of the vehicle with respect to the water.
,
,
, and
denote the mass terms, linear, and quadratic drag terms, and sampling period, respectively. The control input of the system is
, representing the thrusters’ forces. Ocean current profile uncertainties are presented by
, with
D being a compact set and
. The perturbed system is modeled by taking into consideration the disturbances caused by ocean current profile uncertainties and dynamic parameter uncertainties denoted by
. The vehicle’s dynamic parameters are assumed to have been identified through a proper identification scheme.
where
where
T is the compact set of uncertainties bounded by
.
Let be the vector of uncertainties and external disturbances affecting the system. W is a compact set, defined as , where D and T are also compact sets. Hence, W is bounded by , where . The dynamical equation of the system includes the vector of disturbances. However, for the nominal model, we neglect the effect of disturbances.
Employing a sliding-mode control algorithm, the second drone distinguishes itself through the implementation of a nonlinear control strategy. This strategy, characterized by its simplified logical framework, stands resilient against various disturbances and uncertainties that might arise during operation. The foundation of this innovative approach is rooted in the insightful work of Qiao et al., who have introduced a significant advancement in trajectory tracking control. Referred to as the fast integral terminal sliding mode control (FITSM) method, it represents a refined iteration of the ITSM method, as discussed in their authoritative references [
25]. This amalgamation of cutting-edge techniques underscores the second drone’s prowess in achieving precise and robust control, poised to navigate challenges with a balanced blend of sophistication and adaptability.
In the context of this control framework, let us denote as the tracking error, where its significance cannot be understated. To further shape the dynamics, a positive constant is introduced, playing a pivotal role in influencing the system’s behavior. Additionally, we introduce the integers m and n, both of which are odd, with a clear constraint ensuring that n holds a greater value than m, and both remain greater than zero. The interplay of these elements intertwines to orchestrate a controlled system marked by intricate relationships and carefully orchestrated dynamics.
In the scenario where
remains consistently at zero, effectively dictating that
takes on the form
, a fascinating consequence unfolds within the realm of the fractional integrator. Under these conditions, the fractional integrator demonstrates its distinctive behavior and characteristics, showcasing the remarkable interplay between the components involved. This alignment not only offers insights into the system’s response but also unveils a unique facet of the fractional integration process that emerges when specific constraints are meticulously maintained.
The solution to the error dynamic provides crucial insights into the behavior and evolution of the system, unraveling the intricate interplay of variables and shedding light on its underlying dynamics.
Subsequently, the time at which
achieves convergence is determined, yielding a fundamental understanding of the temporal aspect of this critical variable’s behavior.
The convergence of the tracking error
to the ITSM surface
is achieved within a finite timeframe under the condition
. This pivotal observation encapsulates the essence of the FITSM approach, characterizing it as a dynamic system where the interplay of variables culminates in this precise convergence scenario.
On the FITSM surface,
(i.e.,
), with
and other parameters defined as in the ITSM. The integrator is equivalent to
We adapt Chu et al.’s approach presented in [
69] for developing a nervous system-based control system for AUVs using DRL-based control. This control system transforms local environmental information into an array
, where
represents the direction of the ocean current.
where,
and
represent the ocean current direction, while
is a matrix with information on obstacles and ocean currents. To ensure AUV safety, we define a forbidden area around each obstacle considering changing ocean current directions and eddy currents.
where “1” represents the obstacle area; “2” indicates the prohibited zone; and “3” is the navigation region. The navigation state vector,
, represents the angle between vector
and
, where
and
depict the points from the current and initial locations to the destination, respectively. This crucial value can be acquired through the following method:
The allocation of the destination within the AUV coordinate system is succinctly represented by the direction variables
, encapsulating the spatial arrangement of the target point. This system is meticulously defined as follows:
4.4. Sensing
The underwater unmanned vehicle (UUV) is outfitted with an array of sensors, which encompass passive, active, or fused sensing capabilities, enabling it to perceive the surrounding environment, underwater entities, and fellow UUVs. As detailed in [
30], precision in measurements is attainable solely when the target resides within the sonar’s effective field of view. Upon acquiring a set of
N measurements during the initial leg, the UUV’s behavior dictates both its operational mode and the corresponding turn angle
, calculated through the utilization of
. Operating under a non-preferential turning direction, the vehicle consistently executes right turns, expressed in radians as the turn angle unfolds.
The array configuration follows a structured pattern: the initial row corresponds to the first leg, the subsequent row pertains to the second leg, and the final row is designated for the broadside target. This systematic arrangement effectively organizes the data collected. To visualize the operational process of the system, refer to
Figure 4a, which visually captures the step-by-step functioning of the system.
Song et al. [
34] suggested using a color screening filter based on hue–saturation value (HSV) to detect oil leaks. However, RGB color space, which is commonly used in optical displays, is not accurate enough for oil spill segmentation. In HSV space, the video can be converted to screen the oil spill region under the foreground mask. The computation methodologies for the
S and
V channels are well-defined:
S is determined as
, while
V is calculated as
. Equally integral is the calculation of the
H channel, which follows the subsequent process:
By applying the threshold screening process to the HSV model, areas suspected of being affected by oil spills can be described effectively using the following equation:
The process involves setting lower threshold
and upper threshold
values for each color channel. These thresholds are applied to individual pixel values, denoted as
, within the HSV color space. The resultant mask pixel value is assigned as 1 if and only if the pixel values across all three channels satisfy the threshold conditions; otherwise, it is assigned a value of 0. For a more comprehensive understanding of the HSV concept, refer to
Figure 4b, which provides a visual elucidation of the HSV model’s intricacies. This visual aid serves to enhance clarity in grasping the nuances of HSV-based thresholding.
Employing the HSV extraction method within the realm of autonomous intelligence for autonomous underwater vehicles (AUVs) holds profound significance. This technique empowers AUVs to not only detect but also comprehend intricate color details present within their aquatic surroundings. Such an ability proves indispensable for the AUVs’ capacity to conduct thorough and insightful analyses of the underwater environment, thereby enhancing their overall capabilities and contributions to underwater exploration and research. AUV can detect objects based on distinctive color patterns, understand its surroundings, aid in navigation and obstacle avoidance, and enhance underwater observation and monitoring. Machine learning techniques can also be used for color-based object recognition, identifying environmental changes, and predicting environmental conditions. The development of autonomous intelligence through the combination of HSV extraction and Machine Learning holds the potential to improve AUV’s adaptability and interaction with the underwater environment, enhancing AUV’s mission performance in various applications, such as resource exploration, marine environmental monitoring, and scientific research beneath the ocean’s surface. More about the potential use of Machine Learning in AUV operations is discussed in the future research directions chapter.
4.5. Localization
We use two models for UUV localization. The first model, adapted from Braginsky et al. [
42], uses the Doppler velocity log (DVL) method. DVL sends out acoustic beams and measures the Doppler frequency shift to compute the velocity and direction of each beam. Relevant definitions and calculations are as follows:
is the rotation matrix defined by Euler angles
.
Using the DVL method for UUV localization involves two models. The first sends out acoustic beams and measures the Doppler frequency shift for each beam to compute velocity and direction. To transform a vector from body-fixed to DVL coordinates, we use the following coordinate transformation with
and
. Correction of DVL measurement requires considering seafloor-to-platform angles during velocity calculations. Assuming the local seafloor is represented by the plane equation
for
representing the DVL’s four altitude measurements, the measurement can be expressed in matrix form.
Using the seafloor equation and linear algebra, we estimate angles
and
.
Figure 5a provides an illustration of the DVL and its measurement.
We are demonstrating GPS- or GNSS-based location techniques for unmanned surface vehicles (USV). However, GPS measurements in water are inaccurate and misleading. According to Jiang et al. [
43], GPS works on the principle of 2D Cartesian coordinates
and their respective covariances, using
Universal Transverse Mercator (UTM) from the
World Geodetic System (WGS84) ellipsoid. This theory is illustrated in
Figure 5b.
Measurement by GPS
provides the position and orientation parameters written in the equation:
Assuming that position
and orientation
follow a Gaussian probability density function (PDF), the posterior given a GPS reading can be obtained according to the following:
where the PDF for the position is in
and the PDF corresponding to the orientation angle, which follows a wrapped normal distribution:
4.6. Energy Supply
In addition to internal battery power, UUVs can utilize potential renewable energy sources in the aquatic environment. Baik et al. [
51], Sezgin et al. [
52], and Tian et al. [
53] have explored this topic, and we summarize their findings in
Table 6.
Lindsay et al. [
59] and Fang et al. [
63,
64] suggest using track lines and a collaborative approach with unmanned underwater vehicles and systemized underwater communication resources to improve energy efficiency during underwater survey missions.
We propose using UAVs equipped with reconfigurable intelligence surface (RIS) devices [
70,
71] as communication relays to expand coverage to previously unreachable water areas.
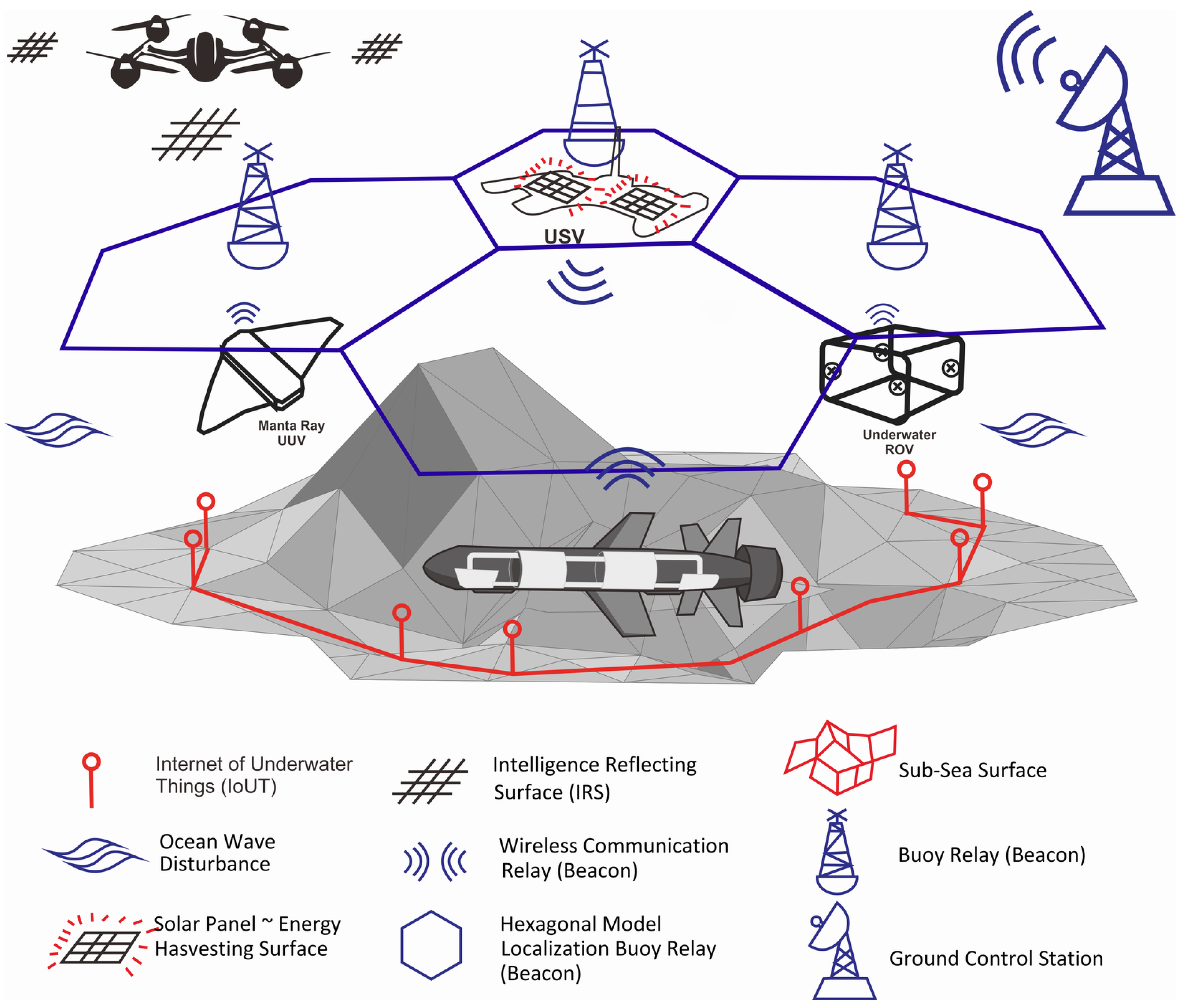
The joint operation scenario for UAV, USV, and UUV is shown in
Figure 6 and summarized in
Table 7.
In a series of sequentially arranged mission illustrations, we can form a comprehensive overview of potential collaboration patterns in the execution of missions involving various types of unmanned vehicles (Unmanned Aerial Vehicle (UAV); Unmanned Surface Vehicle (USV); and Unmanned Underwater Vehicle (UUV)). This concept is supported by networking and communication resources operating both underwater and on the surface. This collaborative approach integrates diverse unmanned vehicle platforms and holds the potential to revolutionize cross-domain mission execution.
Previous research references have discussed the benefits of each type of unmanned vehicle separately within the contexts of maritime and aerial missions. UAVs prove valuable for aerial monitoring and data collection, USVs are suitable for surface water monitoring and patrols, and UUVs can perform exploration and reconnaissance in underwater depths. However, to optimize these potentials, the integration of these elements into a coordinated framework is necessary.
In the described scenario, cooperation between UAVs, USVs, and UUVs is facilitated by a robust network and communication infrastructure in both the air and water environments. This enables these vehicles to share real-time information, coordinate movements, and execute complementary tasks across various environmental layers. For instance, UAVs can gather data from the air and transmit them to USVs on the surface, which can then direct UUVs to conduct further surveys in the ocean depths.
The application of this concept holds extensive potential, ranging from environmental monitoring missions, military reconnaissance, and exploration of marine resources to disaster response in maritime settings. By harnessing the strengths of various types of unmanned vehicles and the support of cross-air and water communication networks, we can create an adaptable, responsive, and efficient system for cross-domain missions. In conclusion, through the amalgamation of ideas from various preceding research references, we have delineated a comprehensive vision of how collaboration among unmanned vehicles, supported by cross-air and water communication networks, can shape new working paradigms in solving cross-domain missions. This concept harbors substantial potential for optimizing resource utilization, expanding operational scope, and delivering innovative solutions to diverse challenges in both maritime and aerial environments.
7. Future Research Directions
The study analyzes the performance gap between UUV operation support technology and the latest research in the field. Further research on resource management, including communication, dive system, control, sensing, localization, and energy supply, is being considered. The Throp model approach, adapted from Menaka et al. [
74] and the CATM model by Jiang et al. [
65], is used to optimize UUV operational capabilities using energy network infrastructure resources, communication, and underwater environment monitoring. Menaka [
74] emphasizes the importance of resource management in communication and underwater vehicle research, which will become the backbone of future sea-related research. The study by Jiang et al. [
65] supports this claim. Mathematical and computer simulations are conducted using IoUT-assisted underwater communication and sensing resource-sharing management.
In future research, we will propose joint operations of AUV, UUV, and USV, optimize the air–water boundary communication model [
29], and model the use of reconfigurable intelligence surfaces (RIS) in AUVs to support these joint operations [
71].
In the implementation of UUV operations, it is possible that Doppler effect may occur, similar to what happens in mobile cellular communication. This is due to the changes in the location and distance between the transmitter (TX) and receiver (RX) as the UUV moves relative to such changes. The extent of the impact of this can be calculated using basic mathematical approaches:
where
is the detected frequency;
is the frequency emitted by the source;
v is the speed of sound waves through the underwater environment;
is the relative detector speed with respect to the underwater environment; and
is the speed of sound waves. A simple illustration is that there is a stronger frequency change as the source approaches the detector, and the opposite occurs as the source moves away. The values of the other parameters will automatically adjust to this phenomenon.
Some studies have anticipated this phenomenon and offered solutions, such as Li et al. [
75] who also discuss the Doppler shift phenomenon in underwater acoustic (UWA) communication and propose a multicarrier orthogonal frequency division multiplexing (OFDM) communication system to overcome this challenge. Furthermore, Abdelkareem et al. [
76] offer a Doppler shift compensation scheme by modifying the carrier frequency of OFDM subcarriers to match the Doppler shift frequency. In the study by Li et al. [
75], an experiment was conducted using different numbers of subcarriers—512, 1024, and 2048—each with the corresponding number of active subcarriers: 484, 968, and 1936, respectively. The experiment focused on bit rates, employing a fixed guard interval of
and an OFDM block duration
T representing values of 42.8, 85.38, and 170.73, respectively. For these setups, the bit rates without coding resulted in 10.52 kb/s, 12.90 kb/s, and 14.55 kb/s. Furthermore, after applying a rate 2/3 channel coding, the bit rates were observed to 7.0 kb/s, 8.6 kb/s, and 9.7 kb/s, respectively [
75].
From the observation above, it can be concluded that the working mechanism of OFDM multicarrier is capable of addressing the classic issue of Doppler shift, as indicated by the constant interval. However, there are certain concerns related to the limitations of this approach. Therefore, an examination of the Doppler effect, its implications, and strategies by which to mitigate it should also be included as part of future research directions in the field of unmanned underwater vehicles.
In addition to future issues regarding the technologies that can be integrated into AUV operations, there are also concerns about potential applications that may arise in the future given the rapid and advancing field of research. We predict that with the development of communication technology and the increasing demands in underwater vehicle research for various purposes such as resource exploration, marine environmental monitoring, and scientific research, there may also be a demand for research in the field of maritime transportation assisted by underwater vehicles, autonomous surface vehicles, and the utilization of Artificial Intelligence technology. Due to the limited references on the utilization of underwater vehicles, autonomous surface vehicles, and Artificial Intelligence technology, we have drawn some references from similar research fields applied to different devices and environments, such as the use of autonomous aerial vehicles in some case studies, including unmanned transportation options equipped with cognitive awareness capabilities that enable UAVs to actively recognize and understand their surroundings, making smarter and more responsive decisions in various situations, and studies using UAVs for autonomous traffic monitoring and management assisted by Artificial Intelligence.
Among the researchers examining and presenting their findings are Filippone et al. [
77], who discussed the developments in urban air mobility and the use of rotorcraft as air transportation options in urban areas. Furthermore, Barmpounakis et al. [
78] conducted a review on the application of unmanned aerial vehicle systems in transportation engineering, covering current practices and future challenges. Additionally, Cavaliere et al. [
79] researched the development of proactive Unmanned Aerial Vehicles (UAVs) to enhance cognitive contextual awareness, aiming to integrate Artificial Intelligence and data processing technologies to enable UAVs to actively recognize and understand their surroundings, making smarter and more responsive decisions in various situations, including obstacle avoidance and mission adaptation based on environmental changes. Vlahogianni et al. [
80] conducted research on model-free traffic condition identification using unmanned aerial vehicles (UAVs) and deep learning, developing a data processing model for traffic analysis from aerial perspectives and training deep learning algorithms to recognize traffic density patterns. Moreover, Trivedi et al. [
81] developed a real-time vision-based vehicle detection and speed measurement system using morphology and binary logical operations. The research aims to create a method capable of accurately detecting vehicles in real time using visual data from cameras and accurately measuring vehicle speeds based on inter-frame movement, achieved by combining morphology and binary logical operation techniques.
If successfully implemented in terrestrial and aerial environments, the possibility of applying these techniques to surface and underwater environments in the case of autonomous underwater vehicles may also be feasible. However, researchers must also address factors that could lead to system and operational failures, considering the unique underwater environment distinct from other environments.
Furthermore, the development of applying Machine Learning for optimization across various sectors involving computation is also predicted to have an impact on the research and development of unmanned underwater vehicles. Several studies supporting this statement include Teng et al. [
82], who investigated underwater target recognition methods based on deep learning frameworks (DL); Bhopale et al. [
83], who developed obstacle avoidance systems based on reinforcement learning (RL) for autonomous underwater vehicles (AUVs); and Sands and Timothy [
84], who developed deterministic Artificial Intelligence (AI) for unmanned underwater vehicles, where “deterministic” signifies that decisions made by the AI system possess a high degree of certainty and definiteness. This leverages predictability and consistency in the behavior of the AI system, implying that it produces identical responses or actions when confronted with the same situation.
Research by Sun et al. [
85] involved developing a three-dimensional path tracking control system for autonomous underwater vehicles using a deep reinforcement learning (DRL) approach. Another study by Sun et al. [
86] focused on mapless motion planning systems for AUVs using a policy gradient-based DRL approach. The main emphasis of policy gradient-based methods is on learning policies that link environmental states to actions that need to be taken by the agent. A notable advantage of this approach is its capability to address continuous action spaces and exhibit stochastic (probabilistic) policies.
From the entire series of reviews, several proposals can be summarized which are expected to be able to overcome common problems and issues regarding research in the field of unmanned underwater vehicles, among others shown in
Table 8.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}