
Indoor Content Delivery Solution for a Museum Based on BLE Beacons



Abstract
:1. Introduction
2. Related Work
3. Beacons to Support Indoor Localization
3.1. BLE Beacons
- Beacon devices are affordable and easy to install and setup, which makes them low risk and a high potential return on investment.
- Beacon technology has great location precision and can be used in almost all environments.
- Beacon usage increases the user’s engagement in the environment and enables a boost in the application area.
- Most digital users are not comfortable with companies having access to their location and path data, which can lead to not using location-based applications.
- Beacon technology is limited to BLE signals, therefore, if a customer does not have Bluetooth enabled or if the device being used is not compatible with Bluetooth, beacon technology will not be able to detect them.
- Beacon’s location functionality is only possible if a certain application is previously installed in order for the beacon technology to communicate with the user’s device. Many users may not install the app.
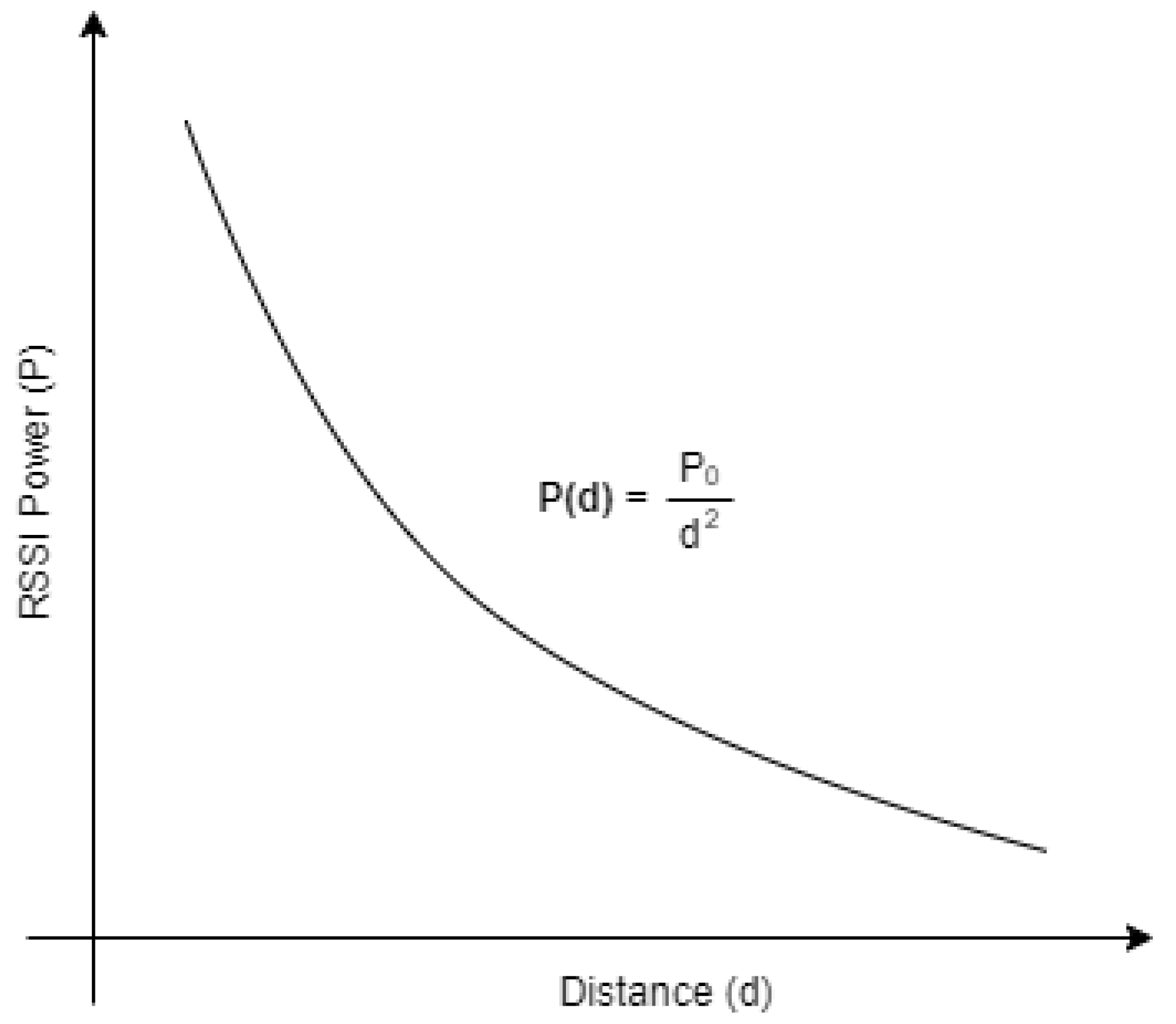
3.2. RSSI
4. Proposed Solution Architecture
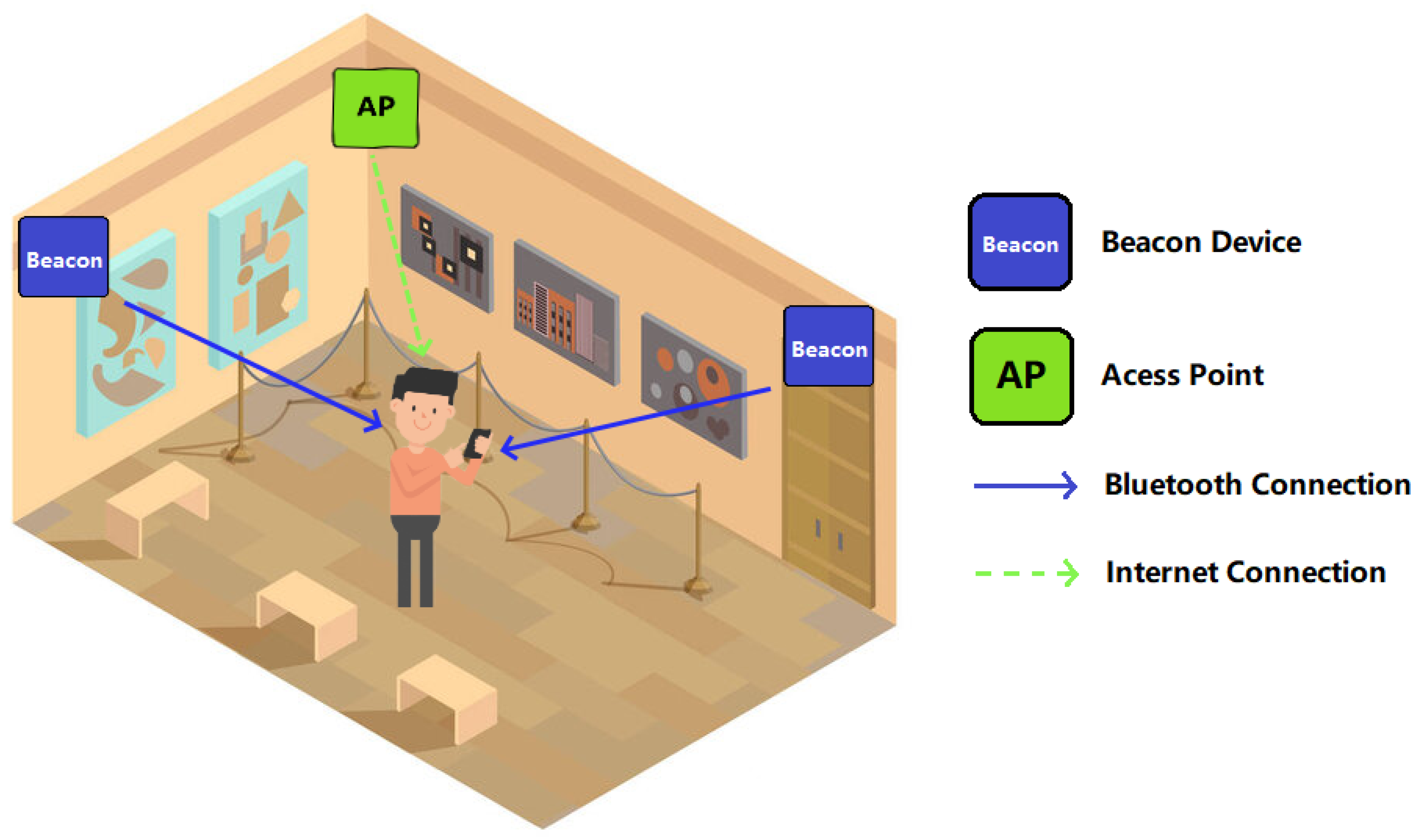
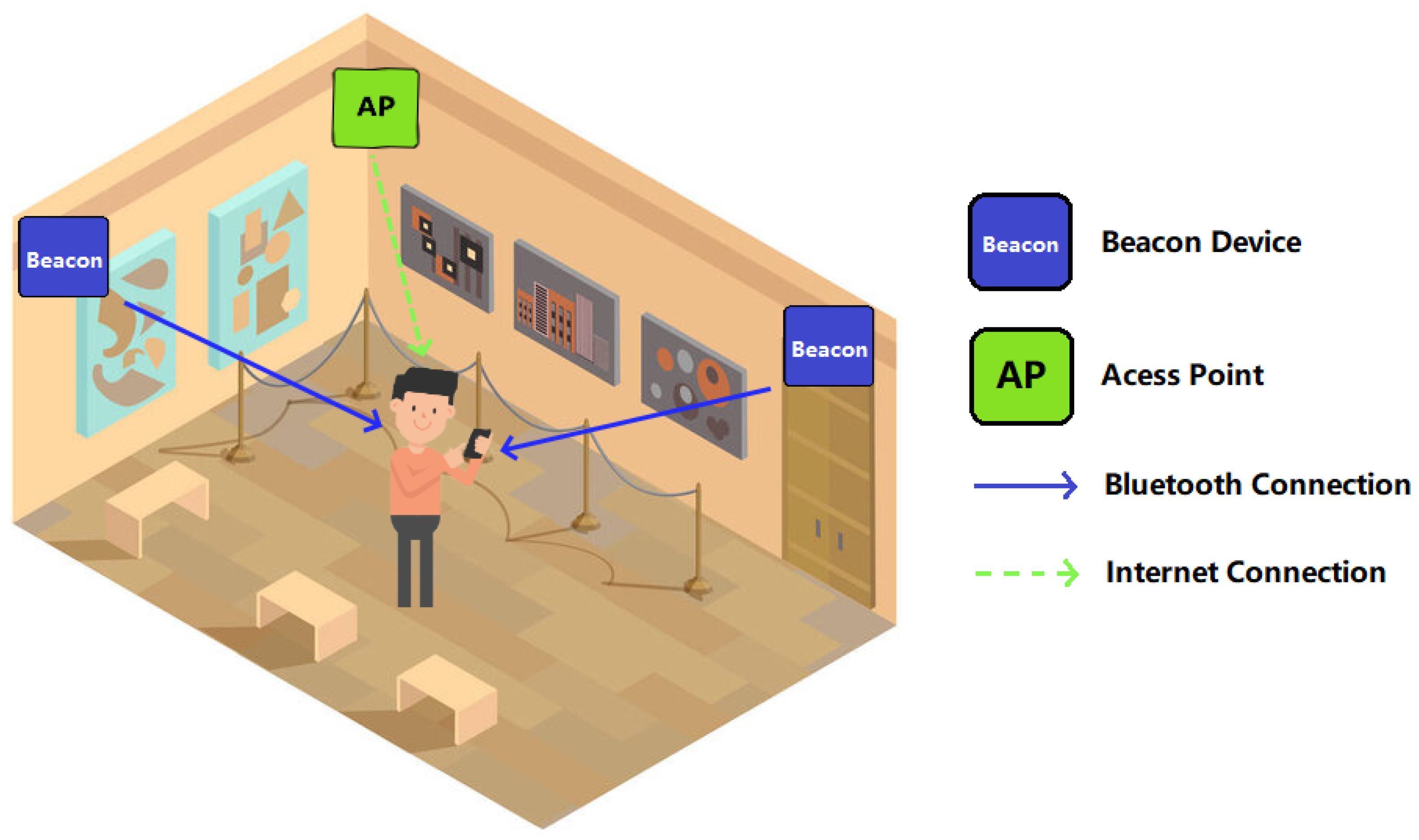
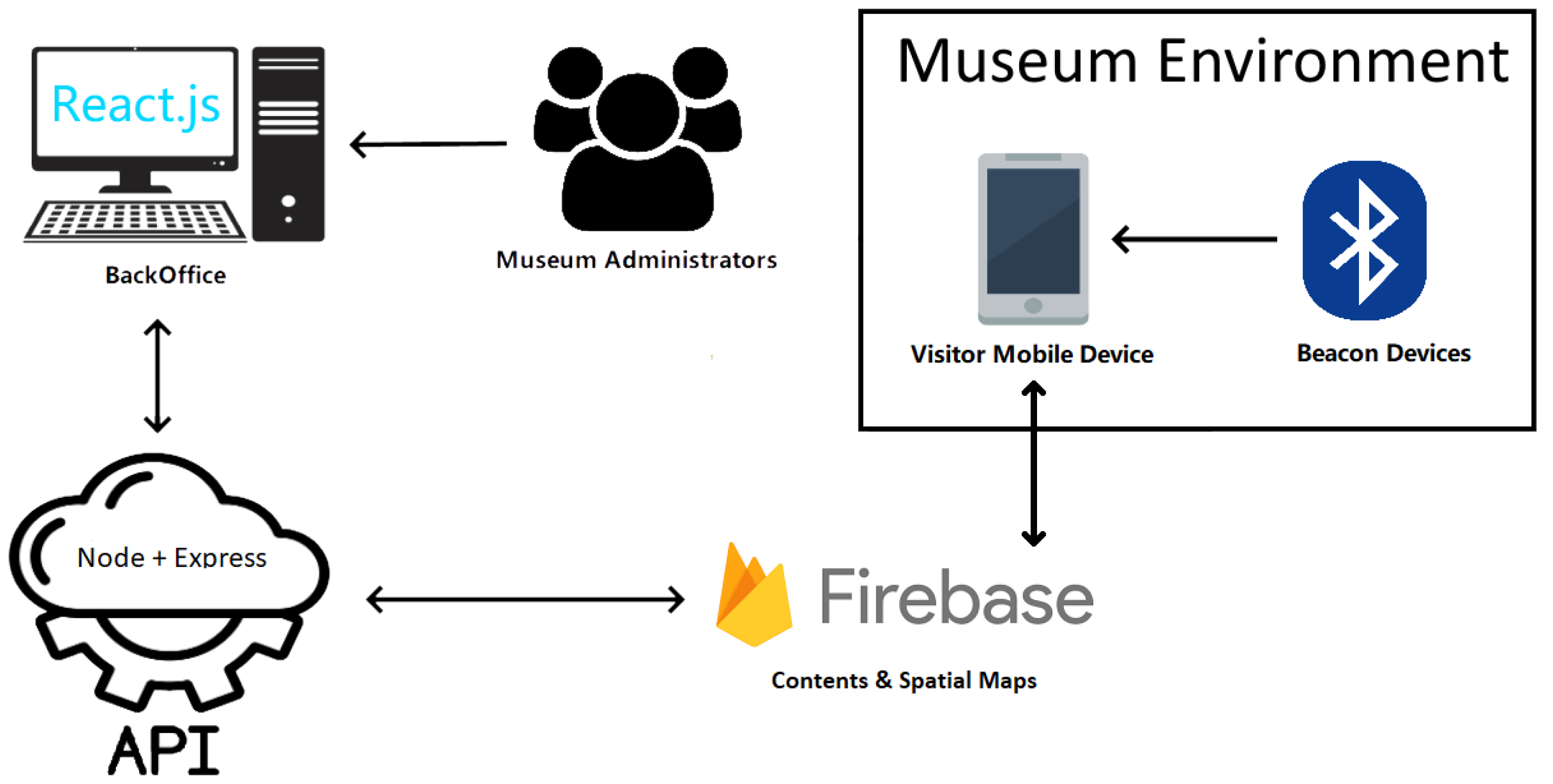
4.1. General Architecture
- A set of BLE Beacon devices that periodically send a signal;
- The visitor’s mobile device that receives information from the beacons and allows us to determine the room where the visitor is located;
- Multiple Access Points distributed by the museum rooms, in order to establish an internet connection with cloud databases and access contents.
4.2. Beacons Specifications
5. Mobile Application
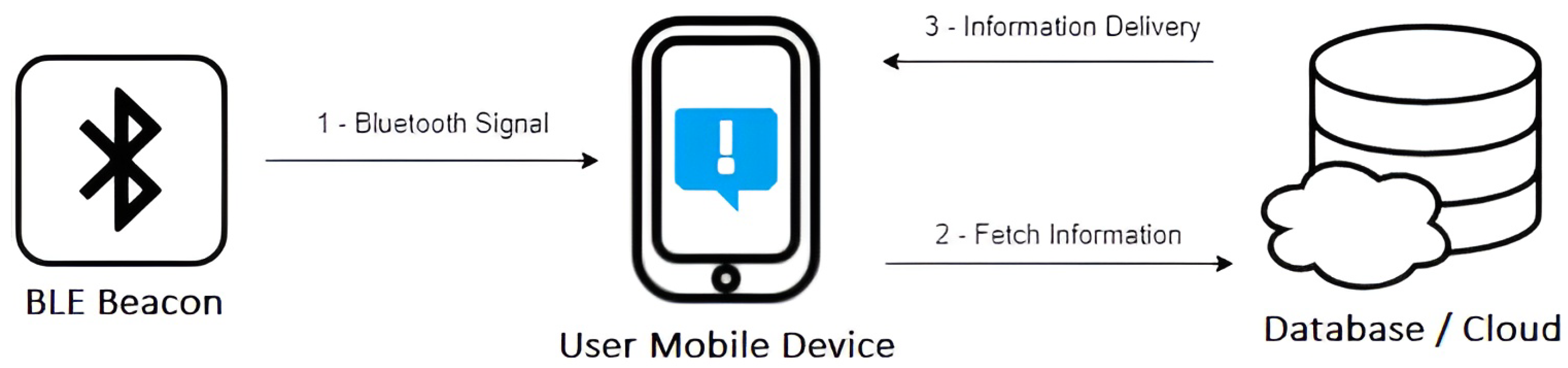
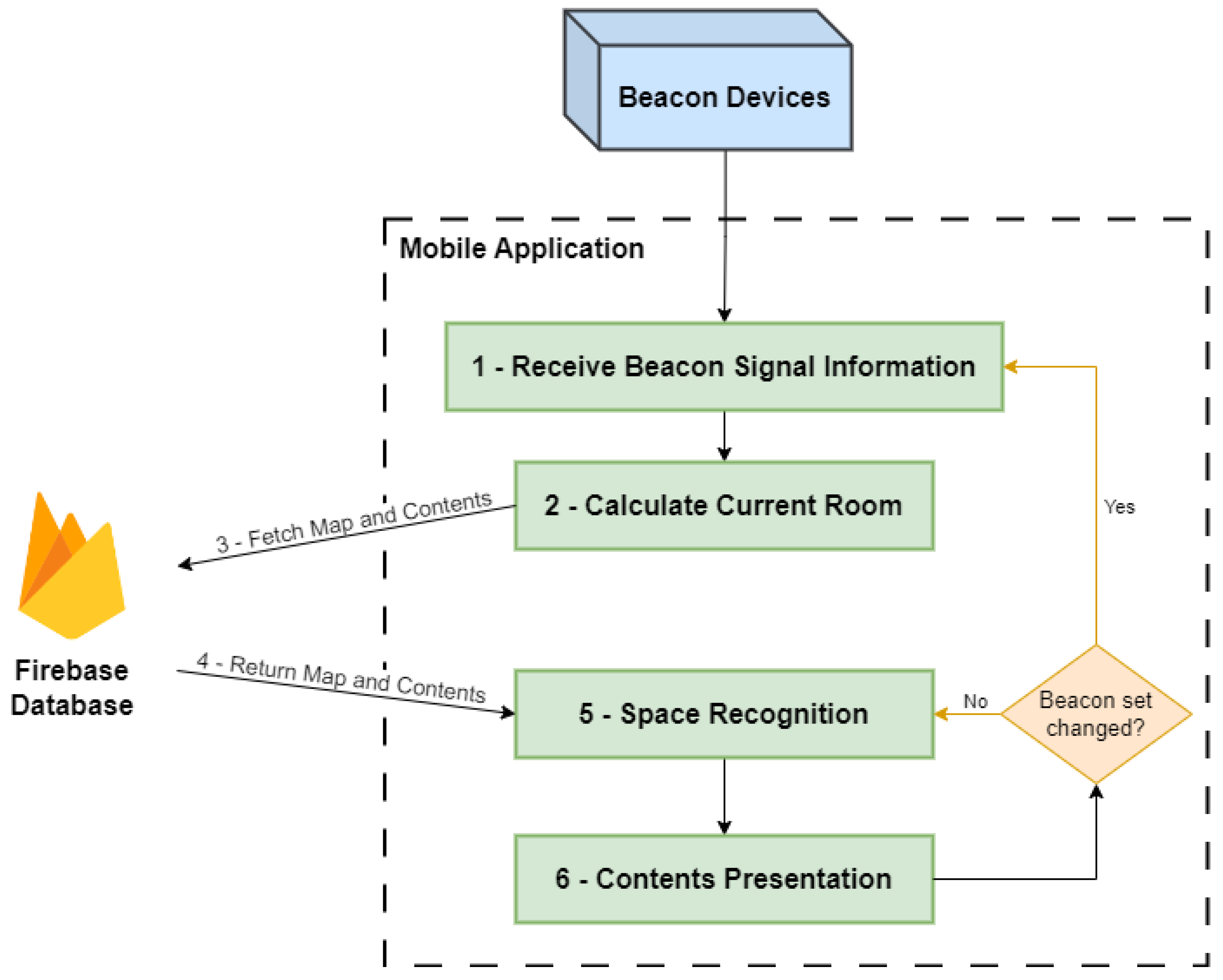
- Collect proximity Beacon Signal: The visitor’s mobile device is constantly listening for local beacon signals. This is the first step needed to move forward. When a certain beacon’s data are received, the application goes to the next step.
- Calculate Current Room: The previously received beacon’s information is processed to calculate the current room that the visitor is in. One possible scenario is that only one beacon signal is received by the mobile device, which represents the room the visitor is in. If the device, additionally, captures signal information from other rooms, both spaces will be considered in the next step of the process.
- Fetch Map and Contents: After the current room is calculated, a fetch request to a Firebase database is made, in order to obtain that room’s AR map and contents.
- Return Map and Contents: The Firebase database returns the wanted room’s AR map and contents back to the application.
- Space Recognition: Using the AR tool, the space recognition starts, comparing, in real-time, the captured video with the AR map previously fetched.
- Contents Presentation: The application is presented the real-world view overlapped with the AR world. In specific places, the fetched AR contents are shown to the visitor in the mobile application.
- Beacon Set Changed: While presenting the contents the application verifies if the received beacon’s data have changed. If not, the application continues doing the space recognition and showing contents; If it has changed, the new current room is calculated and the loop starts again.
6. Beacon Localization Algorithm
Algorithm Functionality
7. Integrating Augmented Reality with Beacon-Based Positioning
- Object-Oriented Information: As the user moves within the indoor environment, the application uses the device’s localization to precisely determine the room or area in which the user is located. By associating the user’s position with the corresponding room, the application can download and present contextually relevant AR content. This content may include 3D models, images, videos, audio, or multimedia overlays, all tailored to enhance the user’s understanding and engagement within the space.
- Smooth Transitions: The integration of AR technology with BLE beacons’ indoor location enables seamless transitions between physical and augmented realities. As the user moves from one room to another, the system quickly detects the change in location using the beacon technology. This way, the application can automatically fetch the right AR content for the new room, providing a smooth and uninterrupted AR experience without user intervention.
- Reduced Processing Power: Relying on the previously calculated user’s location, our application minimizes the need for computationally intensive algorithms on the user’s device. Instead, the application primarily focuses on downloading and rendering AR content related to the current room. This approach optimizes the app’s performance, reduces processing power consumption, and enhances the overall user experience by maintaining smooth and responsive AR interactions, once again increasing the range of possible users.
8. Experimental Results
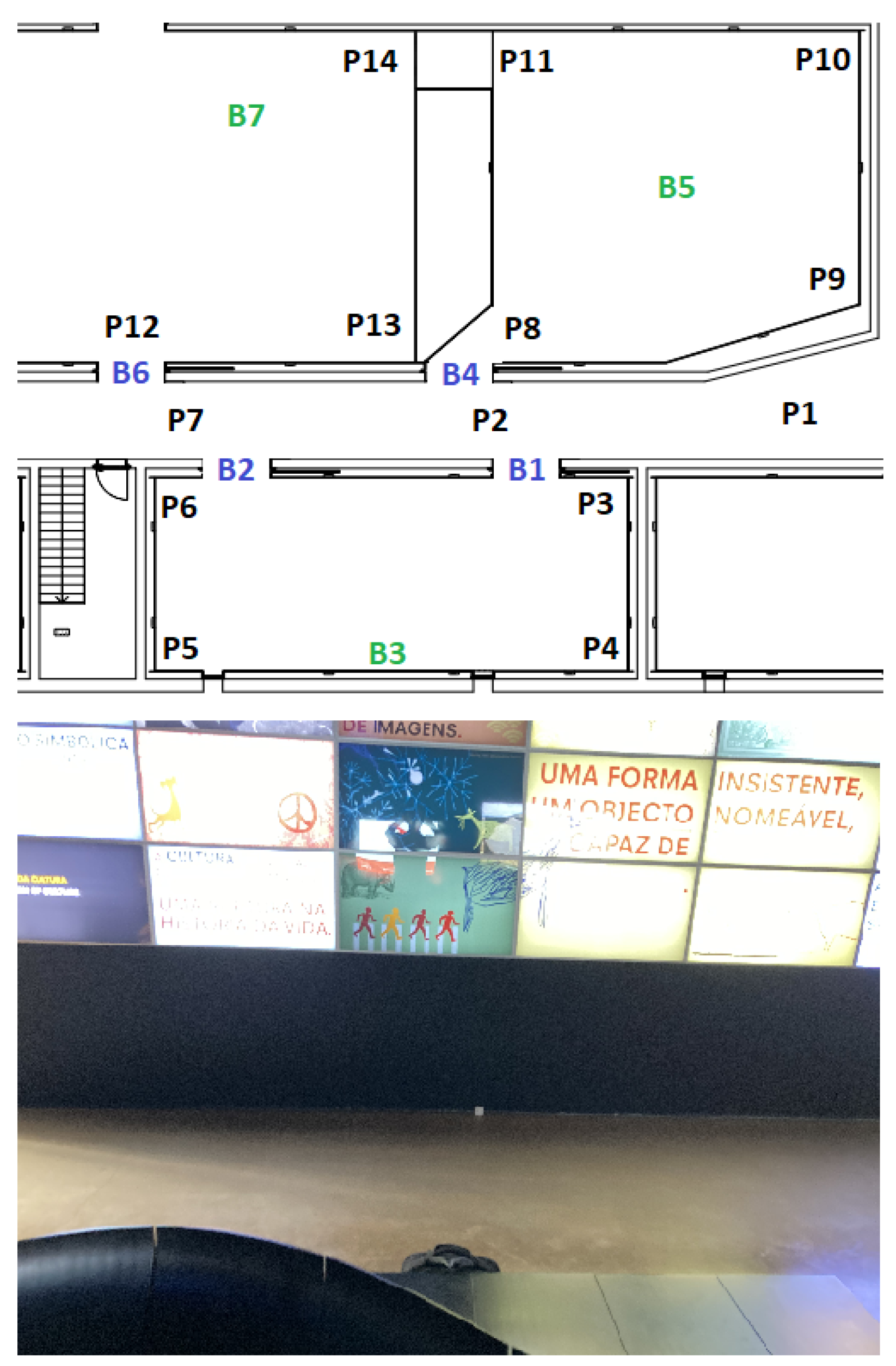
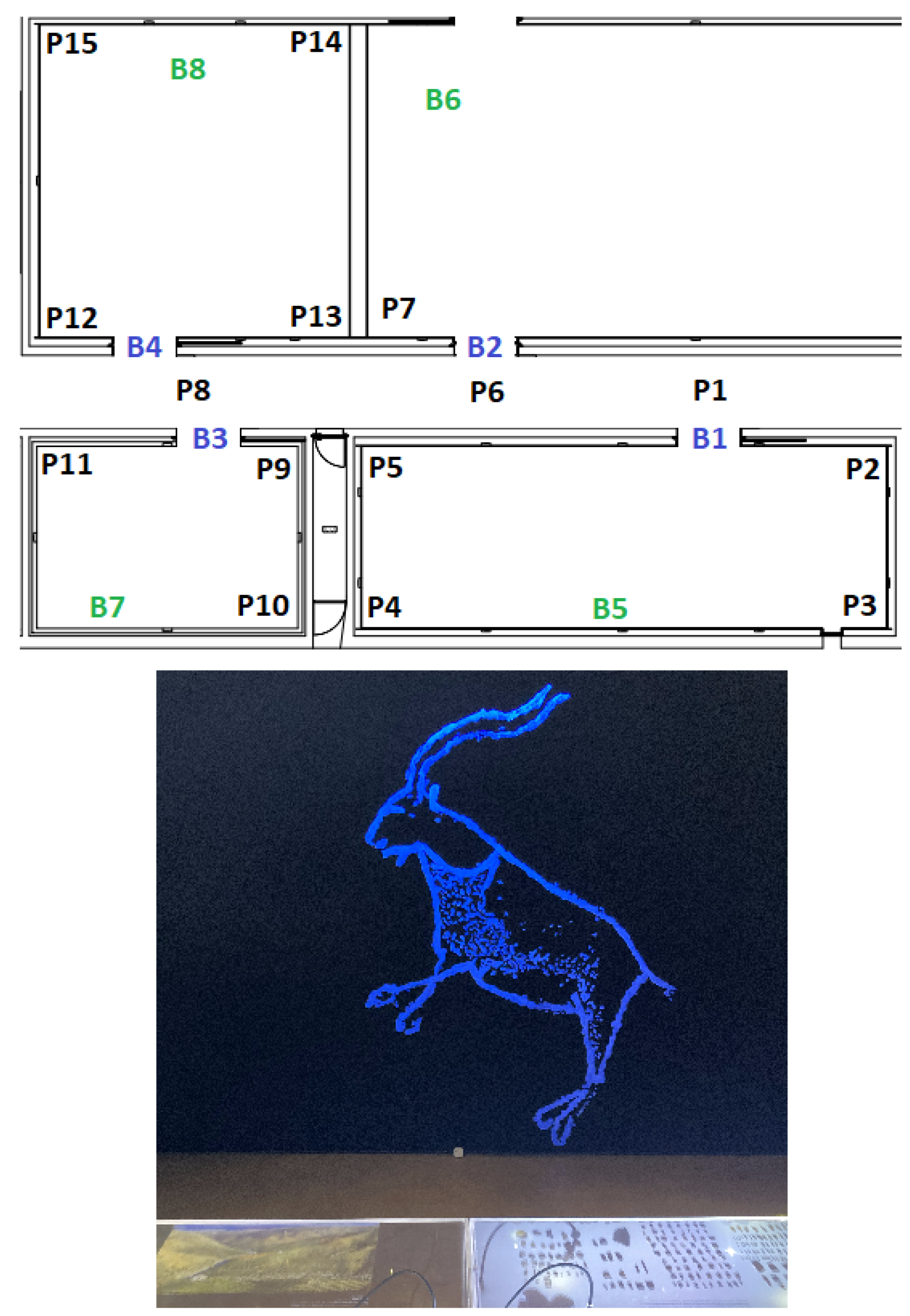
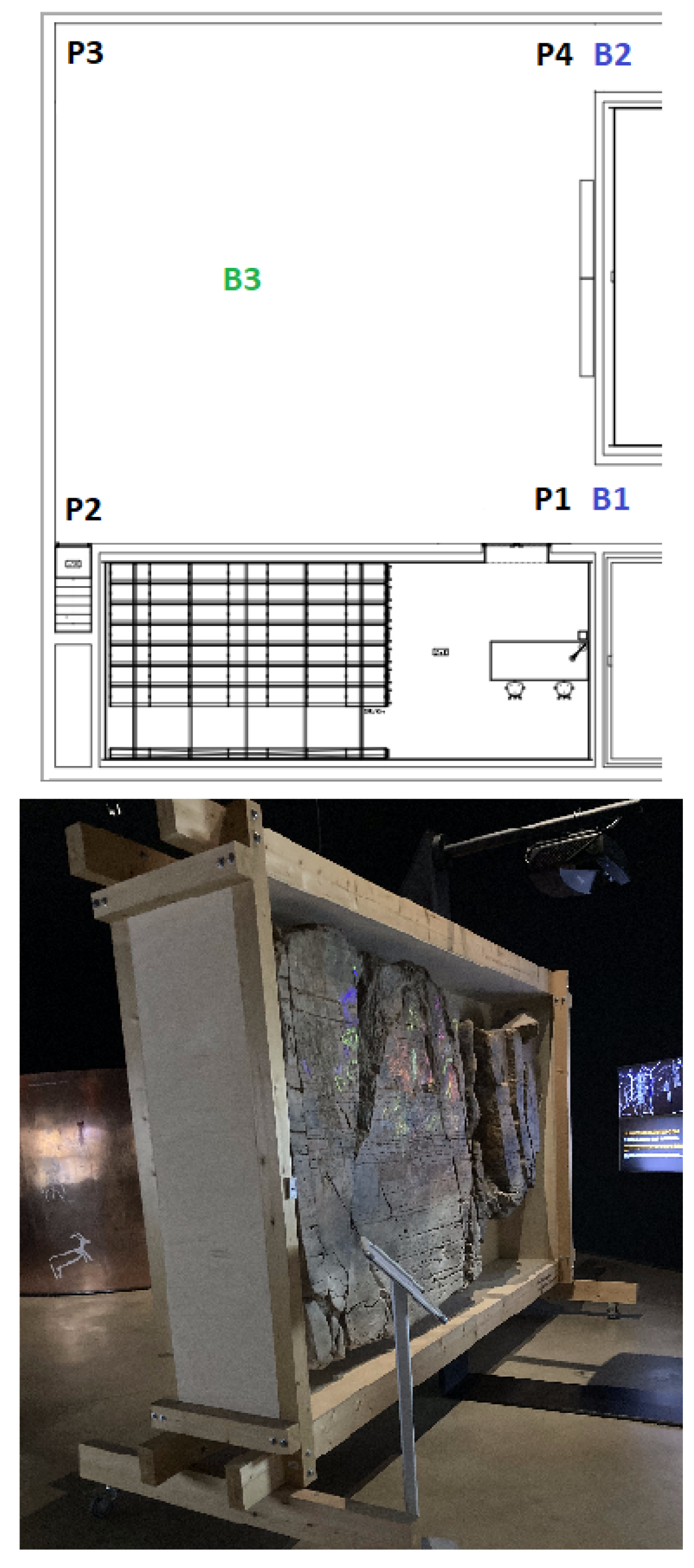
8.1. Test Scenarios
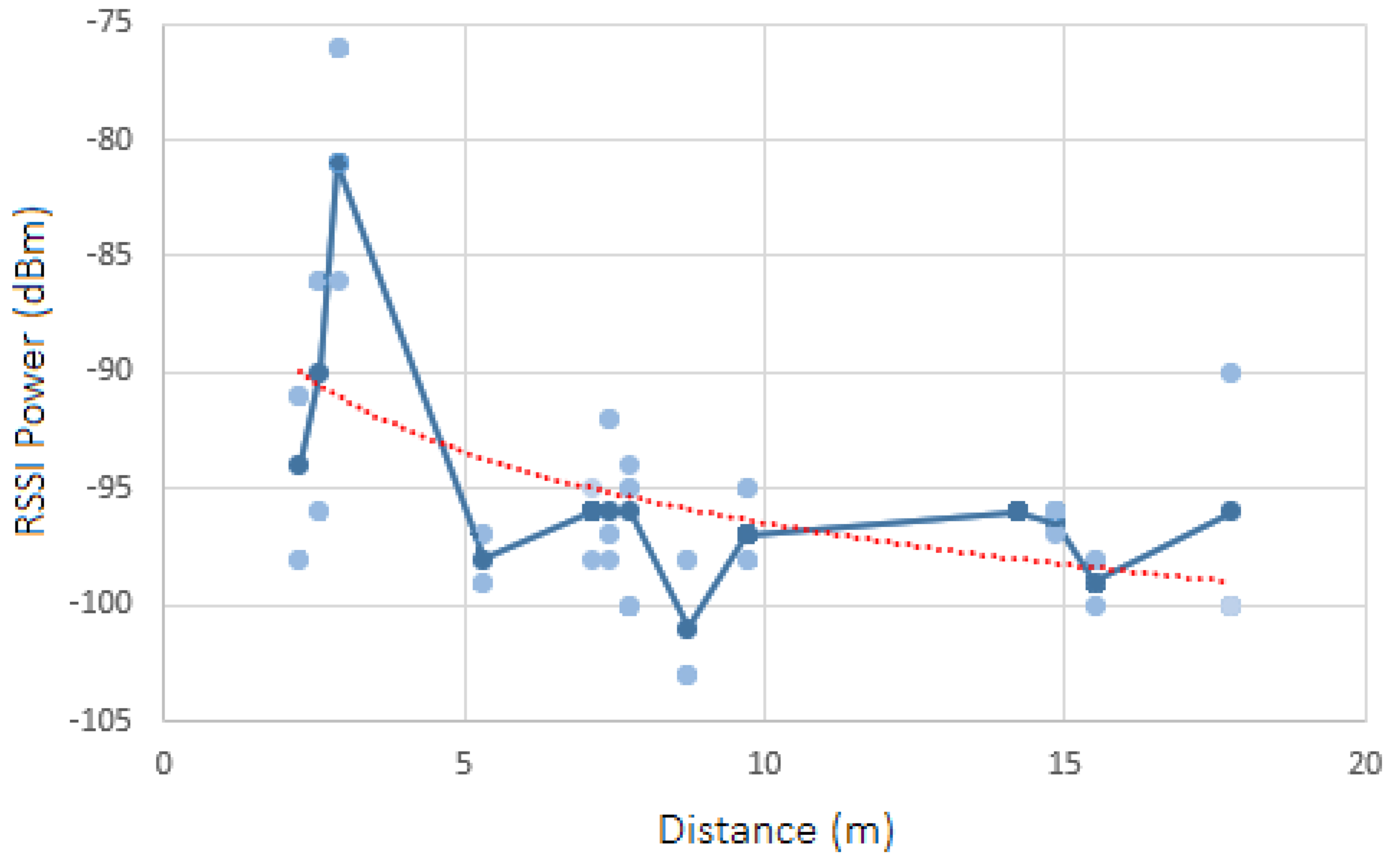
8.2. Test Results: RSSI Analysis
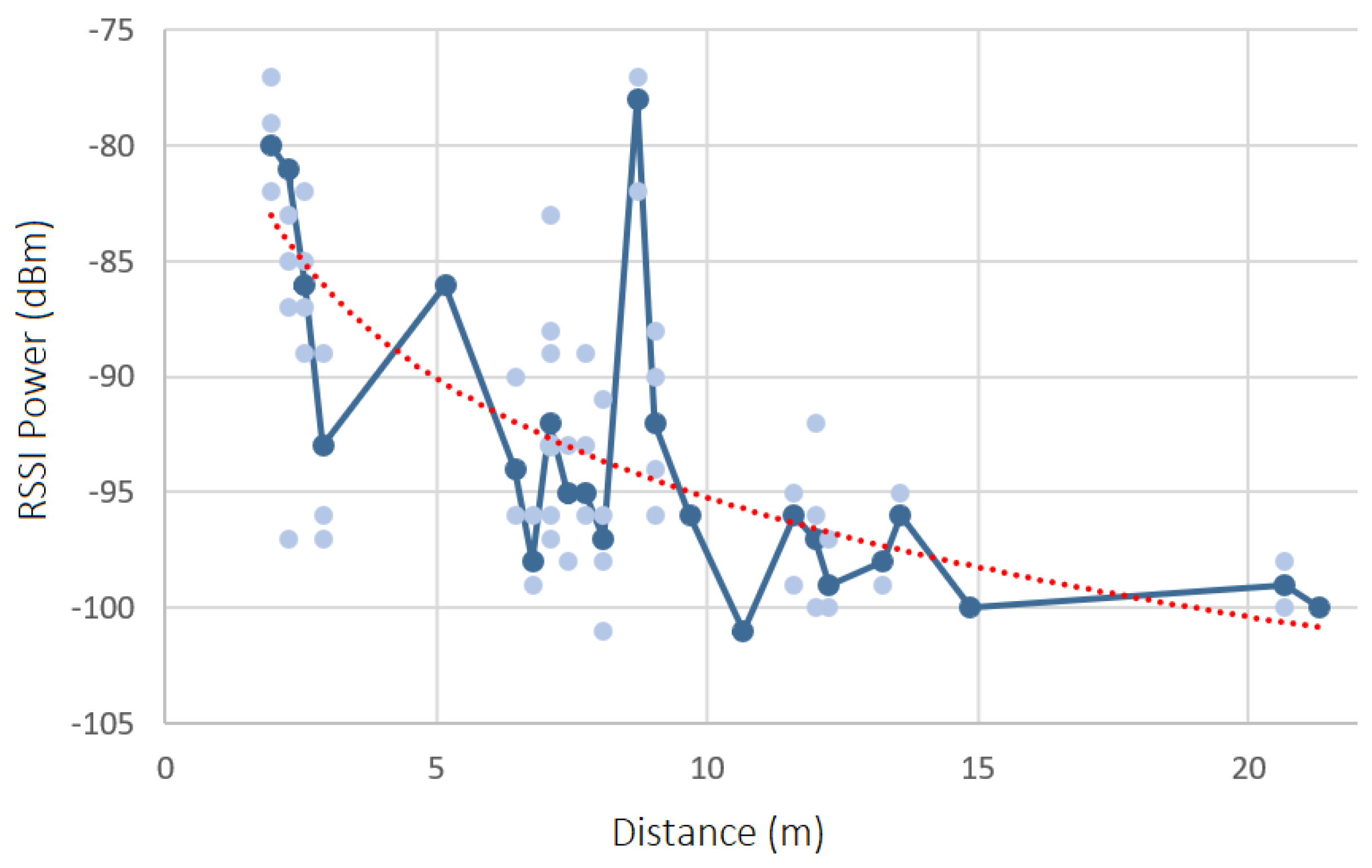
8.2.1. Scenario 1—RSSI Analysis
- Path Loss: 1.397 dBm
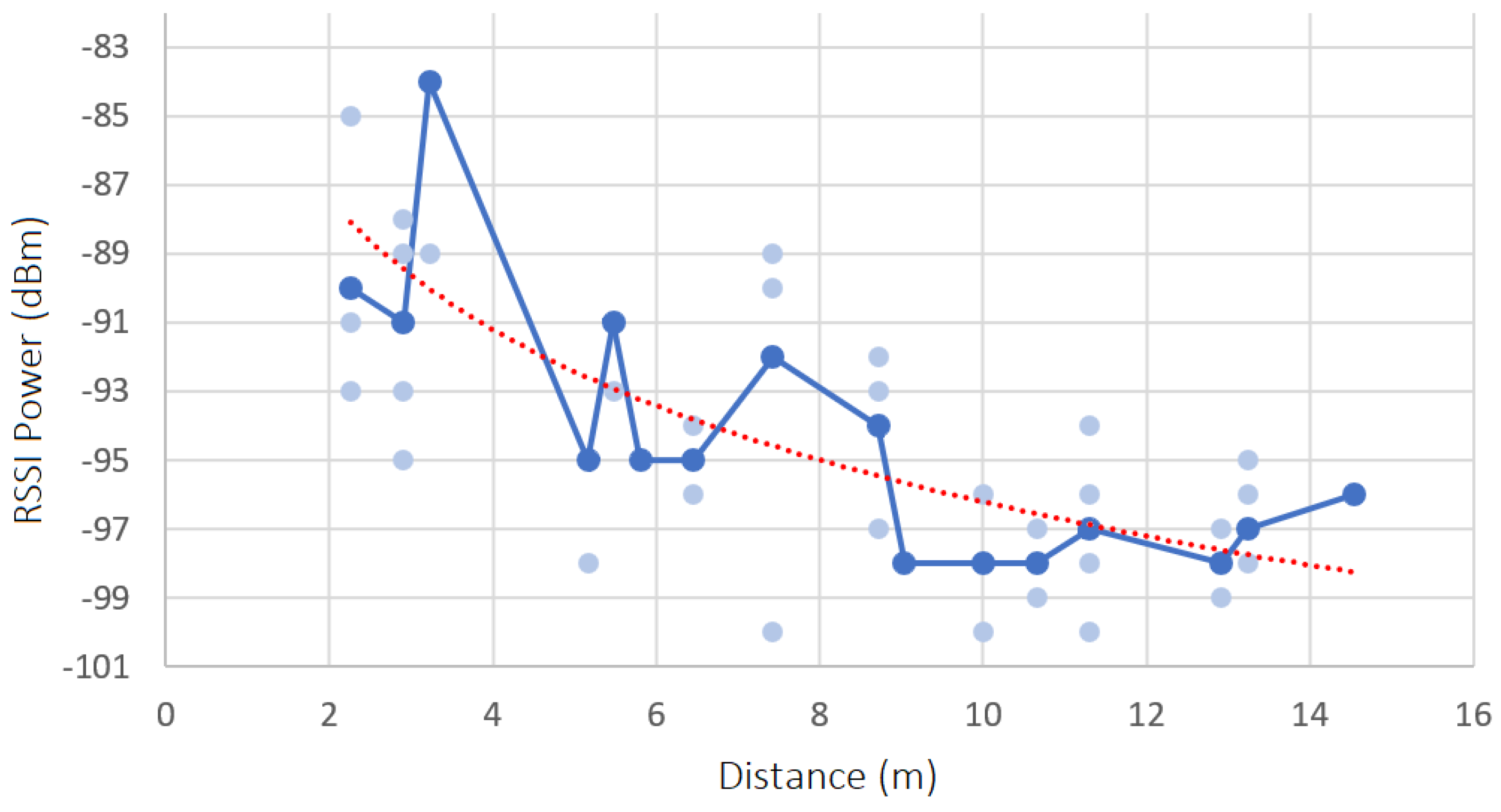
8.2.2. Scenario 2—RSSI Analysis
- Path Loss: 0.908 dBm
8.2.3. Scenario 3—RSSI Analysis
- Path Loss: 1.349 dBm
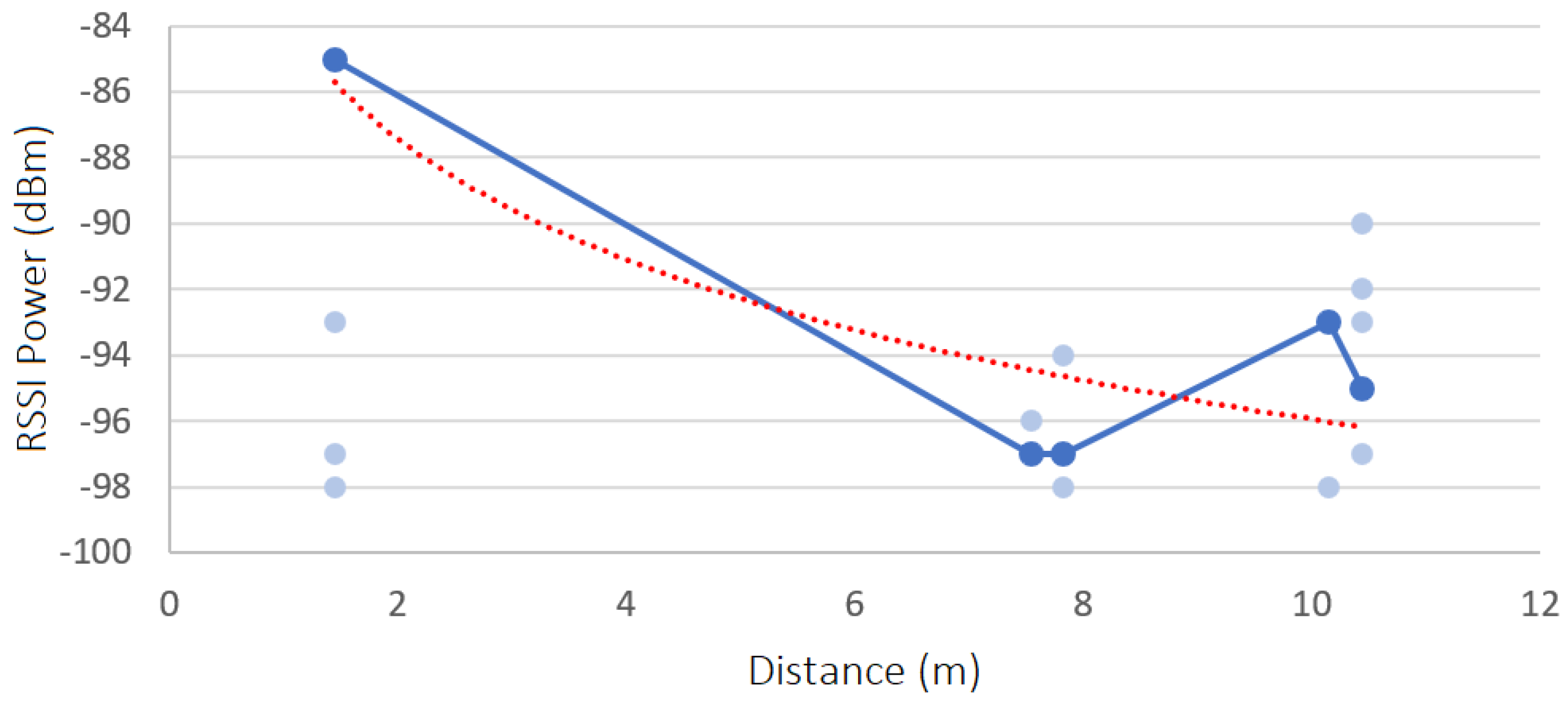
8.2.4. Scenario 4—RSSI Analysis
- Path Loss: 1.234 dBm
8.2.5. Charts’ Findings
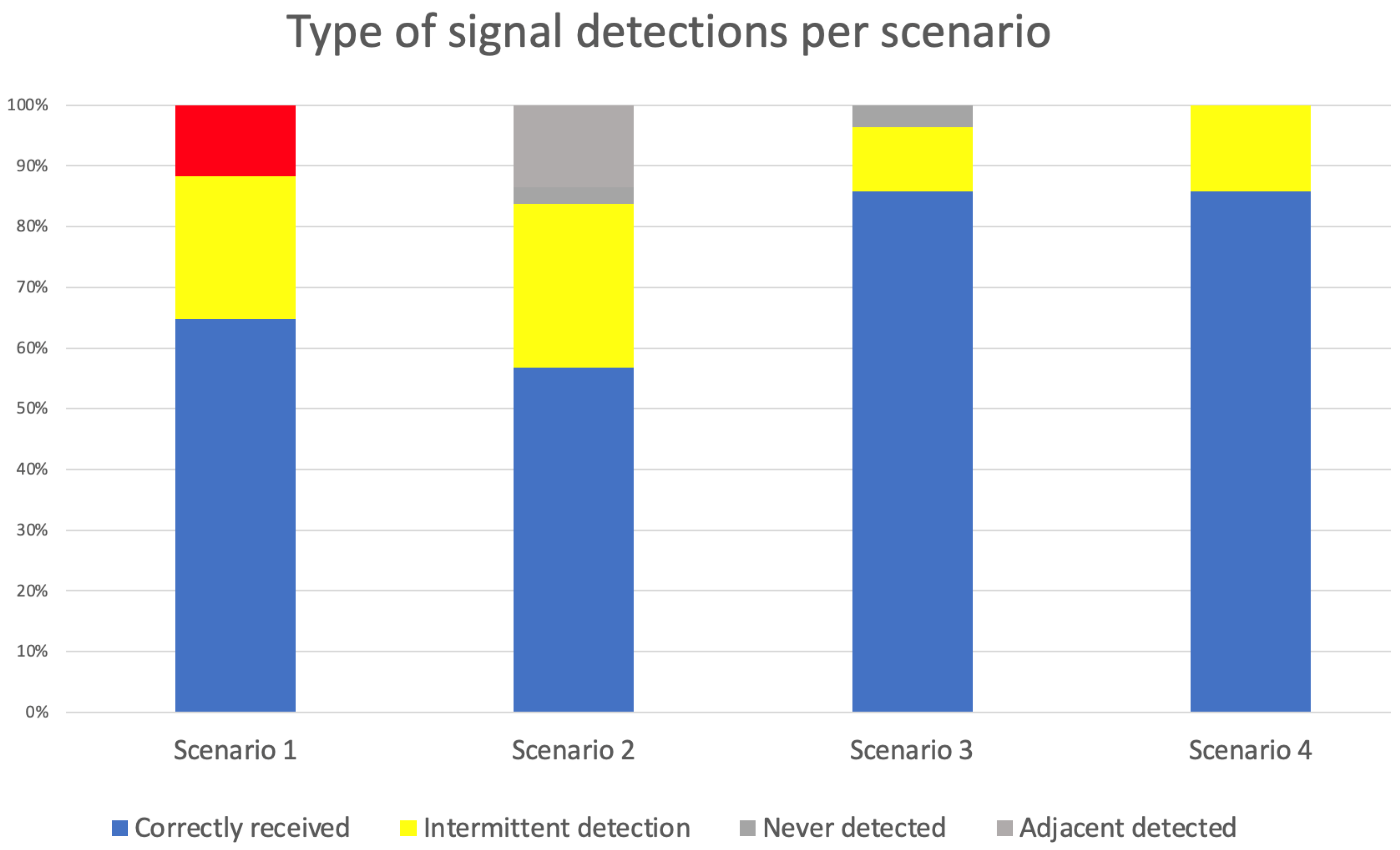
8.3. Test Results: Detection Analysis
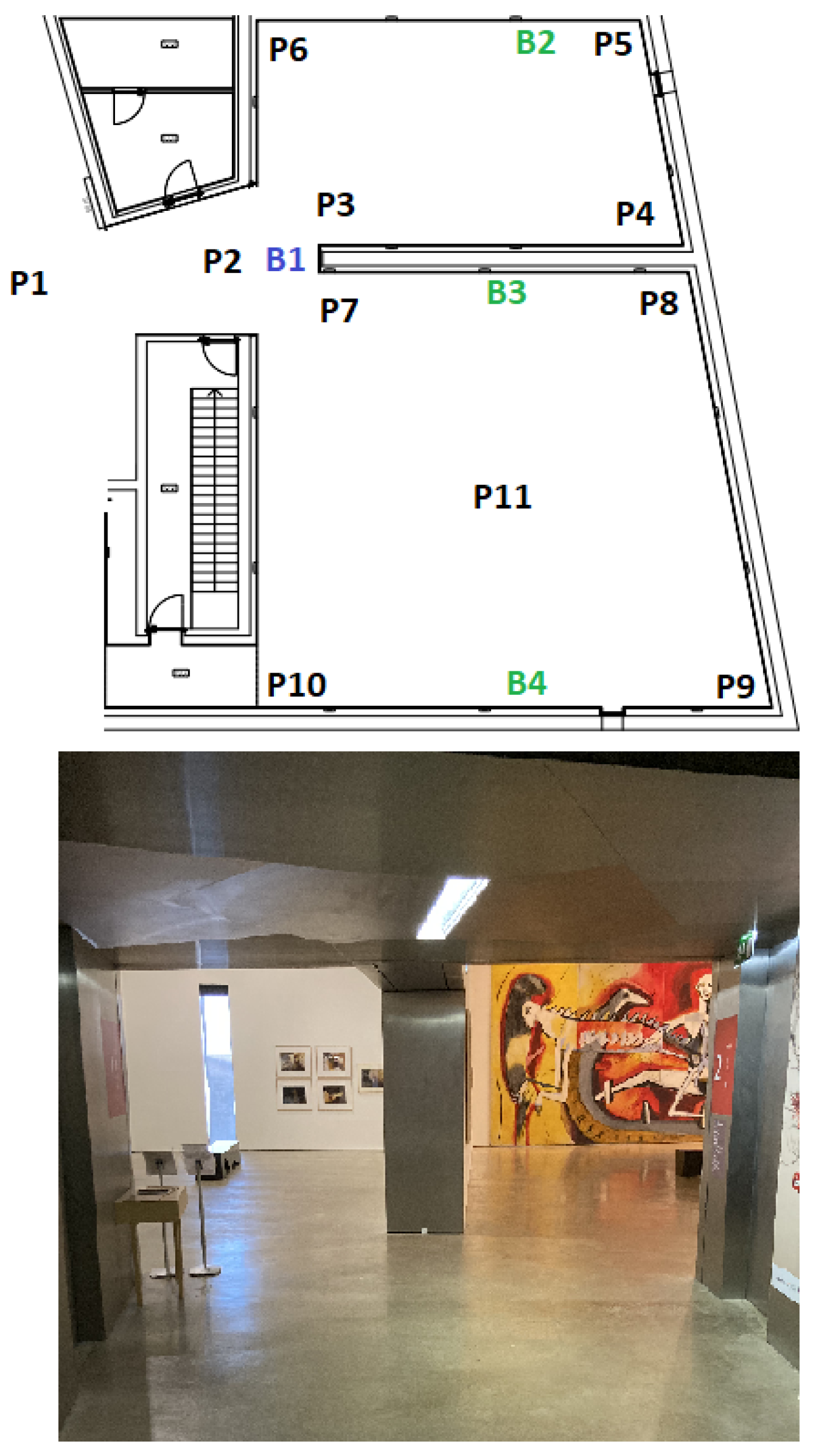
8.4. Indoor Room Identification
9. Discussion
9.1. Pros and Cons—Proposed Solution
9.2. Multiple Beacons Detection
9.3. Beacon’s Positioning
- Place one beacon at each door of a room with a reduced range signal (border beacon)—the range is to be determined in each specific scenario;
- Depending on the room size, one or more beacons should be placed inside the room with a wider range signal (inside beacon)—also to be determined in each scenario. It is important to mention that the inside beacon’s range signal should cover the entire inside area of the room;
- Avoid placing the beacons near metal structures;
- Avoid placing the beacons in places with many contents between the beacon and the receiver device;
- Place the beacons in a higher place, allowing a better signal transmission and avoiding unauthorized access.
10. Conclusions
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| MDPI | Multidisciplinary Digital Publishing Institute |
| BLE | Bluetooth Low Energy |
| RSSI | Received Signal Strength Indicator |
| RF | Radio Frequency |
| US | Ultrasonic |
| CPU | Central Process Unit |
| HVAC | Heating, Ventilating and Air Conditioning |
References
- Jiwane, A.; Khan, A.F. Interactive museums: Empowering visitors’ engagement. In Proceedings of the 3rd Smart Cities Symposium (SCS 2020), Online, 21–23 September 2020; Volume 2020, pp. 308–313. [Google Scholar] [CrossRef]
- Vena, A.; Illanes, I.; Alidieres, L.; Sorli, B.; Perea, F. RFID based Indoor Localization System to Analyze Visitor Behavior in a Museum. In Proceedings of the 2021 IEEE International Conference on RFID Technology and Applications (RFID-TA), Delhi, India, 6–8 October 2021; pp. 183–186. [Google Scholar] [CrossRef]
- Handojo, A.; Lim, R.; Octavia, T.; Anggita, J.K. Museum Interactive Information Broadcasting Using Indoor Positioning System and Bluetooth Low Energy: A Pilot Project on Trowulan Museum Indonesia. In Proceedings of the 2018 3rd Technology Innovation Management and Engineering Science International Conference (TIMES-iCON), Bangkok, Thailand, 12–14 December 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Duchetto, F.D.; Baxter, P.; Hanheide, M. Lindsey the Tour Guide Robot—Usage Patterns in a Museum Long-Term Deployment. In Proceedings of the 2019 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Alletto, S.; Cucchiara, R.; Del Fiore, G.; Mainetti, L.; Mighali, V.; Patrono, L.; Serra, G. An Indoor Location-Aware System for an IoT-Based Smart Museum. IEEE Internet Things J. 2016, 3, 244–253. [Google Scholar] [CrossRef]
- Verde, D.; Romero, L.; Faria, P.M.; Paiva, S. Architecture for Museums Location-Based Content Delivery using Augmented Reality and Beacons. In Proceedings of the 2022 IEEE International Smart Cities Conference (ISC2), Pafos, Cyprus, 26–29 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Spachos, P.; Papapanagiotou, I.; Plataniotis, K.N. Microlocation for Smart Buildings in the Era of the Internet of Things: A Survey of Technologies, Techniques, and Approaches. IEEE Signal Process. Mag. 2018, 35, 140–152. [Google Scholar] [CrossRef]
- Sadowski, S.; Spachos, P. RSSI-Based Indoor Localization with the Internet of Things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Pivato, P.; Palopoli, L.; Petri, D. Accuracy of RSS-Based Centroid Localization Algorithms in an Indoor Environment. IEEE Trans. Instrum. Meas. 2011, 60, 3451–3460. [Google Scholar] [CrossRef]
- Casareo, K.; Chaczko, Z. Beacon-Based Localization Middleware for Tracking in Medical and Healthcare Environments. In Proceedings of the 2018 12th International Symposium on Medical Information and Communication Technology (ISMICT), Sydney, Australia, 26–28 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Jahan, K.; Adler, S.; Ahmad, J.; Hansen, C. Wireless Tracking for Industrial Services. In Proceedings of the 2018 15th Workshop on Positioning, Navigation and Communications (WPNC), Bremen, Germany, 25–26 October 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Giuliano, R.; Cardarilli, G.C.; Cesarini, C.; Di Nunzio, L.; Fallucchi, F.; Fazzolari, R.; Mazzenga, F.; Re, M.; Vizzarri, A. Indoor Localization System Based on Bluetooth Low Energy for Museum Applications. Electronics 2020, 9, 1055. [Google Scholar] [CrossRef]
- Spachos, P.; Plataniotis, K.N. BLE Beacons for Indoor Positioning at an Interactive IoT-Based Smart Museum. IEEE Syst. J. 2020, 14, 3483–3493. [Google Scholar] [CrossRef]
- Pušnik, M.; Galun, M.; Šumak, B. Improved Bluetooth Low Energy Sensor Detection for Indoor Localization Services. Sensors 2020, 20, 2336. [Google Scholar] [CrossRef]
- Shum, L.C.; Faieghi, R.; Borsook, T.; Faruk, T.; Kassam, S.; Nabavi, H.; Spasojevic, S.; Tung, J.; Khan, S.S.; Iaboni, A. Indoor Location Data for Tracking Human Behaviours: A Scoping Review. Sensors 2022, 22, 1220. [Google Scholar] [CrossRef] [PubMed]
- Duong, N.S.; Nguyen, T.P.; Nguyen, Q.T.; Dinh-Thi, T.M. Improving indoor positioning system using weighted linear least square and neural network. Int. J. Sens. Netw. 2023, 41, 67–77. [Google Scholar] [CrossRef]
- Labinghisa, B.A.; Lee, D.M. Neural network-based indoor localization system with enhanced virtual access points. J. Supercomput. 2021, 77, 638–651. [Google Scholar] [CrossRef]
- Maduranga, M.; Abeysekera, R. Bluetooth low energy (ble) and feed forward neural network (ffnn) based indoor positioning for location-based iot applications. Int. J. Wirel. Microw. Technol. (IJWMT) 2022, 12, 33–39. [Google Scholar] [CrossRef]
- Filippoupolitis, A.; Oliff, W.; Loukas, G. Bluetooth Low Energy Based Occupancy Detection for Emergency Management. In Proceedings of the 2016 15th International Conference on Ubiquitous Computing and Communications and 2016 International Symposium on Cyberspace and Security (IUCC-CSS), Granada, Spain, 14–16 December 2016; pp. 31–38. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Yuen, C.; Blessing, L. Plug-Mate: An IoT-based occupancy-driven plug load management system in smart buildings. Build. Environ. 2022, 223, 109472. [Google Scholar] [CrossRef]
- Balaji, B.; Xu, J.; Nwokafor, A.; Gupta, R.; Agarwal, Y. Sentinel: Occupancy Based HVAC Actuation Using Existing WiFi Infrastructure within Commercial Buildings. In Proceedings of the 11th ACM Conference on Embedded Networked Sensor Systems, SenSys ’13, Roma, Italy, 11–15 November 2013; Association for Computing Machinery: New York, NY, USA, 2013. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Chong, A. Occupancy prediction using deep learning approaches across multiple space types: A minimum sensing strategy. Build. Environ. 2022, 226, 109689. [Google Scholar] [CrossRef]
- Torres-Solis, J.; Falk, T.; Chau, T. A Review of Indoor Localization Technologies: Towards Navigational Assistance for Topographical Disorientation; INTECH Open Access Publisher: Rijeka, Croatia, 2010; Volume 2010. [Google Scholar] [CrossRef]
- Gu, Y.; Lo, A.; Niemegeers, I. A survey of indoor positioning systems for wireless personal networks. IEEE Commun. Surv. Tutor. 2009, 11, 13–32. [Google Scholar] [CrossRef]
- Botler, L.; Spörk, M.; Diwold, K.; Römer, K. Direction Finding with UWB and BLE: A Comparative Study. In Proceedings of the 2020 IEEE 17th International Conference on Mobile Ad Hoc and Sensor Systems (MASS), Delhi, India, 10–13 December 2020; pp. 44–52. [Google Scholar] [CrossRef]
- Tekler, Z.D.; Low, R.; Gunay, B.; Andersen, R.K.; Blessing, L. A scalable Bluetooth Low Energy approach to identify occupancy patterns and profiles in office spaces. Build. Environ. 2020, 171, 106681. [Google Scholar] [CrossRef]
- Potortì, F.; Park, S.; Jiménez Ruiz, A.R.; Barsocchi, P.; Girolami, M.; Crivello, A.; Lee, S.Y.; Lim, J.H.; Torres-Sospedra, J.; Seco, F.; et al. Comparing the Performance of Indoor Localization Systems through the EvAAL Framework. Sensors 2017, 17, 2327. [Google Scholar] [CrossRef] [PubMed]
- Kalbandhe, A.; Patil, S. Indoor Positioning System using Bluetooth Low Energy. In Proceedings of the 2016 International Conference on Computing, Analytics and Security Trends (CAST), Pune, India, 19–21 December 2016; pp. 451–455. [Google Scholar] [CrossRef]
- Schjørring, A.; Cretu-Sircu, A.L.; Rodriguez, I.; Cederholm, P.; Berardinelli, G.; Mogensen, P. Performance Evaluation of a UWB Positioning System Applied to Static and Mobile Use Cases in Industrial Scenarios. Electronics 2022, 11, 3294. [Google Scholar] [CrossRef]
- Di Pietra, V.; Dabove, P. Recent advances for UWB ranging from Android Smartphone. In Proceedings of the 2023 IEEE/ION Position, Location and Navigation Symposium (PLANS), Monterey, CA, USA, 24–27 April 2023; pp. 1226–1233. [Google Scholar] [CrossRef]
- Lee Ann, B. Advantages and Disadvantages of Beacon Technology. 2022. Available online: https://leeannbaugh.com/advantages-and-disadvantages-of-beacon-technology/ (accessed on 12 May 2023).
- Shang, F.; Su, W.; Wang, Q.; Gao, H.; Fu, Q. A Location Estimation Algorithm Based on RSSI Vector Similarity Degree. Int. J. Distrib. Sens. Netw. 2014, 10, 371350. [Google Scholar] [CrossRef]
- Kochláň, M.; Miček, J.; Ševčík, P. 2.4 GHz ISM band radio frequency signal indoor propagation. In Proceedings of the 2014 Federated Conference on Computer Science and Information Systems, Warsaw, Poland, 17–20 September 2014; pp. 1027–1034. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indoor Positioning Technology | Range | Accuracy Error | Cost | Power Consumption | Extra Device on User-Side |
|---|---|---|---|---|---|
| UWB | Up to 200 m | 6–10 cm | High | Low | Yes |
| Infrared | Up to 30 m | 1–2 m | Moderate | Low | Yes |
| RFID | Up to 10 m | 1–3 m | Moderate | Low | Yes |
| WiFi | Up to 100 m | 1–5 m | Low | High | No |
| BLE Beacon | Up to 100 m | 1–5 m | Low | Low | No |
| Connectivity | Bluetooth Low Energy 5.0 (BLE 5.0) |
|---|---|
| Range | Up to 100 m |
| Transmission power levels | −20 to +4 dBm |
| Batteries number | 2 (replaceable) |
| Battery lifetime | +8 years |
| Micro-controller | nRF52832 |
| Dimensions | 49 mm × 49 mm × 15 mm |
| Weight | 38 g |
| B1 | B2 | B3 | B4 | Correct Room Detection? | |
|---|---|---|---|---|---|
| P1 | - | - | - | - | Yes |
| P2 | 2.58 m | - | 17.77 m | Yes | |
| P3 | 1.83 m | 9.69 m | - | - | Yes |
| P4 | - | 7.11 m | - | - | Yes |
| P5 | - | 2.91 m | - | - | Yes |
| P6 | 7.43 m | 8.72 m | - | Yes | |
| P7 | 2.26 m | - | 8.38 m | 14.86 m | Yes |
| P8 | - | - | 5.33 m | 14.21 m | Yes |
| P9 | - | - | 15.50 m | 7.43 m | Yes |
| P10 | - | - | 15.50 m | 7.76 m | Yes |
| B1 | B2 | B3 | B4 | B5 | B6 | B7 | Correct Room Detection? | |
|---|---|---|---|---|---|---|---|---|
| P1 | 5.17 m | - | - | 6.78 m | - | - | - | Yes |
| P2 | 2.26 m | - | - | 2.26 m | - | - | - | Yes |
| P3 | 2.58 m | 13.24 m | 7.43 m | 7.11 m | - | - | - | - |
| P4 | - | - | - | - | - | - | - | Yes |
| P5 | 13.57 m | 7.75 m | 4.58 m | - | - | - | - | Yes |
| P6 | 2.58 m | 2.26 m | 9.69 m | - | - | 5.17 m | - | Yes |
| P7 | - | 2.58 m | 11.63 m | - | - | 2.58 m | 11.95 m | Yes |
| P8 | - | - | - | 13.24 m | 6.47 m | - | 12.27 m | Yes |
| P9 | - | - | - | 14.24 m | 7.11 m | - | 20.67 m | Yes |
| P10 | - | - | - | - | 7.11 m | - | 21.32 m | No |
| P11 | - | - | - | - | 7.43 m | 17.89 m | 10.66 m | No |
| P12 | - | - | - | - | - | 1.94 m | 8.72 m | Yes |
| P13 | 6.65 m | - | - | - | - | 8.08 m | 9.04 m | Yes |
| P14 | - | - | - | - | - | 14.86 m | 5.17 m | Yes |
| B1 | B2 | B3 | B4 | B5 | B6 | B7 | B8 | Correct Room Detection? | |
|---|---|---|---|---|---|---|---|---|---|
| P1 | 2.26 m | - | - | - | 9.04 m | - | - | - | No |
| P2 | 5.81 m | - | - | - | 11.31 m | - | - | - | Yes |
| P3 | 8.72 m | - | - | - | 10.01 m | - | - | - | Yes |
| P4 | 14.54 m | - | - | - | 8.72 m | - | - | - | Yes |
| P5 | - | - | - | - | 10.66 m | - | - | - | Yes |
| P6 | 10.04 m | - | 7.43 m | - | - | - | - | - | Yes |
| P7 | - | - | - | - | - | - | - | - | - |
| P8 | - | - | 2.26 m | 2.26 m | - | - | - | 12.92 m | No |
| P9 | - | - | 2.91 m | - | - | - | 8.72 m | - | Yes |
| P10 | - | - | 7.43 m | - | - | - | 6.46 m | - | Yes |
| P11 | - | - | 5.49 m | - | - | - | 6.14 m | - | Yes |
| P12 | - | - | 7.43 m | 3.23 m | - | - | - | 11.31 m | Yes |
| P13 | - | - | - | 5.81 m | - | - | - | 11.31 m | Yes |
| P14 | - | - | - | - | - | - | - | 5.49 m | Yes |
| P15 | - | - | - | 13.24 m | - | - | - | 5.17 m | Yes |
| B1 | B2 | B3 | Correct Room Detection? | |
|---|---|---|---|---|
| P1 | 1.45 m | - | 10.15 m | Yes |
| P2 | 13.92 m | - | 7.83 m | Yes |
| P3 | - | - | 7.54 m | Yes |
| P4 | - | 1.45 m | 10.44 m | Yes |
| Correctly Received | Intermittent Detection | Never Detected | Adjacent Detected | |
|---|---|---|---|---|
| Scenario 1 | 11 | 4 | 2 | 0 |
| Scenario 2 | 21 | 10 | 1 | 5 |
| Scenario 3 | 24 | 3 | 1 | 0 |
| Scenario 4 | 6 | 1 | 0 | 0 |
| # Positions | Accuracy | |
|---|---|---|
| Scenario 1 | 9 | 100% |
| Scenario 2 | 13 | 85% |
| Scenario 3 | 14 | 86% |
| Scenario 4 | 4 | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Verde, D.; Romero, L.; Faria, P.M.; Paiva, S. Indoor Content Delivery Solution for a Museum Based on BLE Beacons. Sensors 2023, 23, 7403. https://doi.org/10.3390/s23177403
Verde D, Romero L, Faria PM, Paiva S. Indoor Content Delivery Solution for a Museum Based on BLE Beacons. Sensors. 2023; 23(17):7403. https://doi.org/10.3390/s23177403
Chicago/Turabian StyleVerde, David, Luís Romero, Pedro Miguel Faria, and Sara Paiva. 2023. "Indoor Content Delivery Solution for a Museum Based on BLE Beacons" Sensors 23, no. 17: 7403. https://doi.org/10.3390/s23177403
APA StyleVerde, D., Romero, L., Faria, P. M., & Paiva, S. (2023). Indoor Content Delivery Solution for a Museum Based on BLE Beacons. Sensors, 23(17), 7403. https://doi.org/10.3390/s23177403