
Design Method of Three-Component Optic Fiber Balance Based on Fabry–Perot Displacement Sensor
Abstract
:1. Introduction
2. Three-Component Optic Fiber Balance Based on Fabry–Perot Displacement Measurement Sensor
2.1. Structure and Principles of Optic Fiber Balance
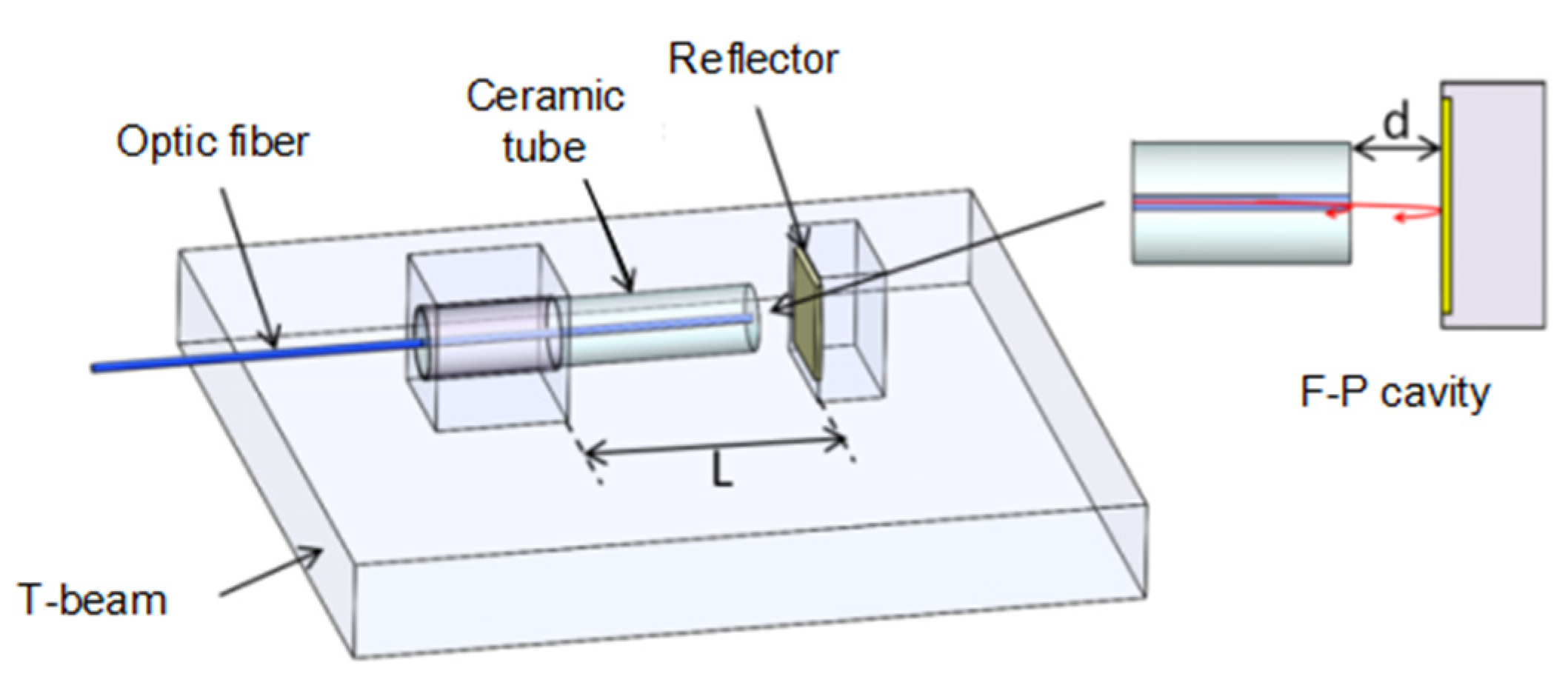
2.2. Principle of Fabry–Perot Displacement Measurement
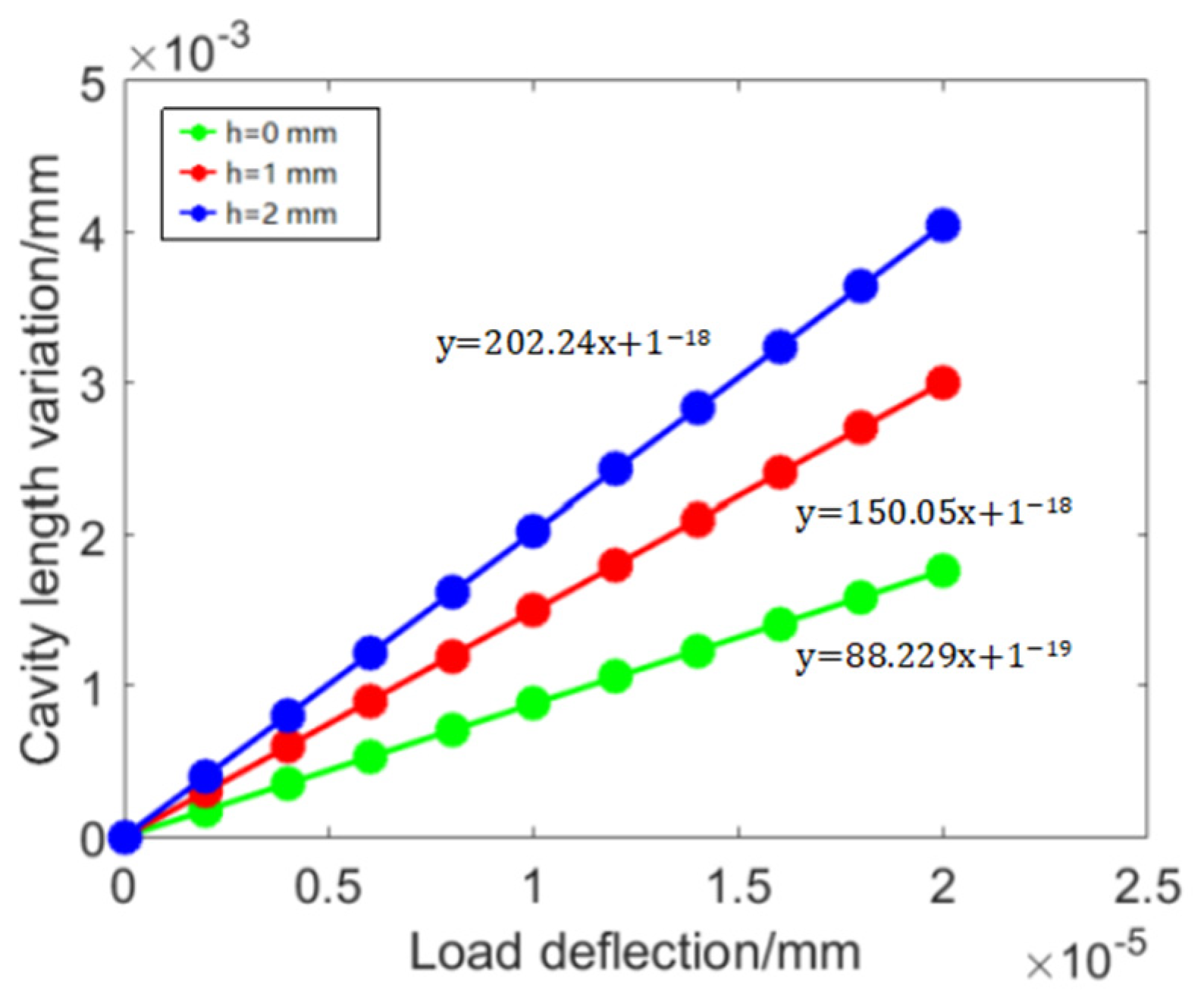
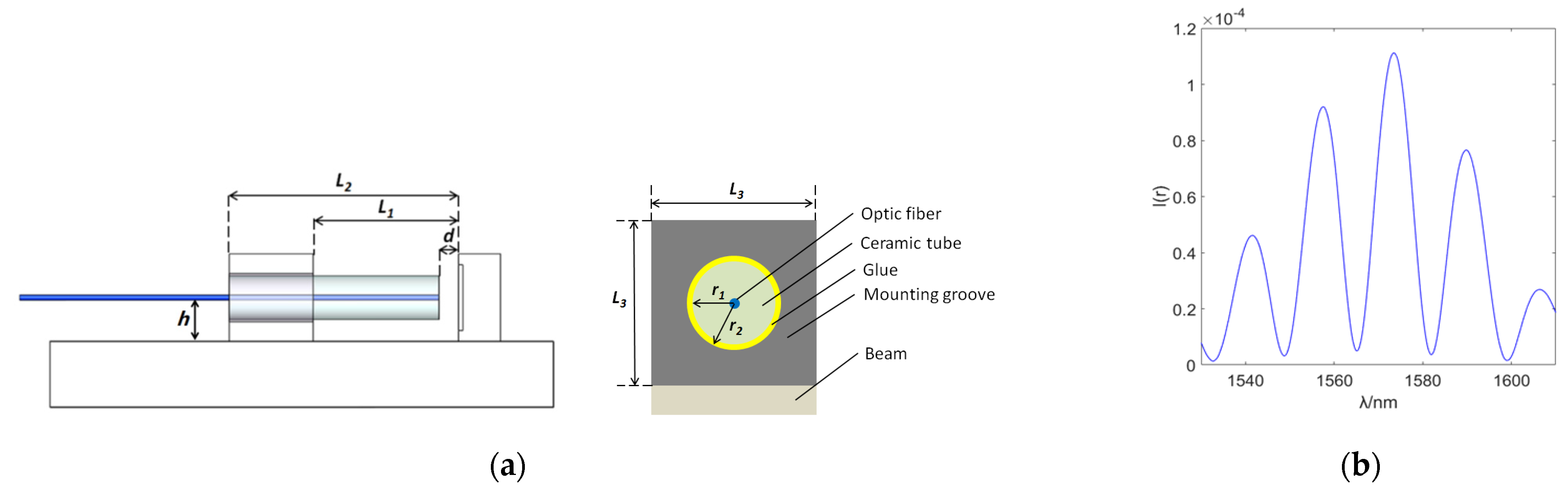
2.3. Simulation Analysis and Sensor Parameter Optimization
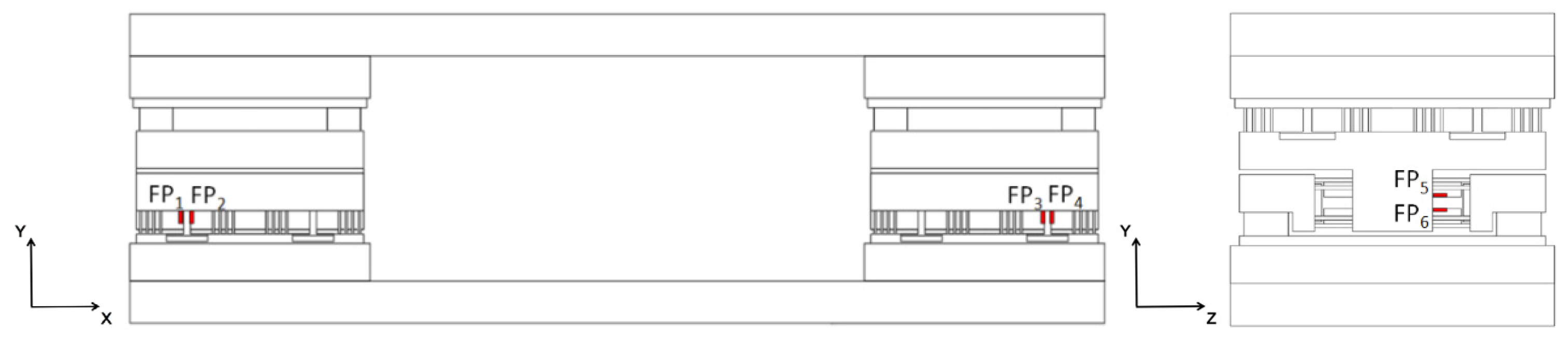
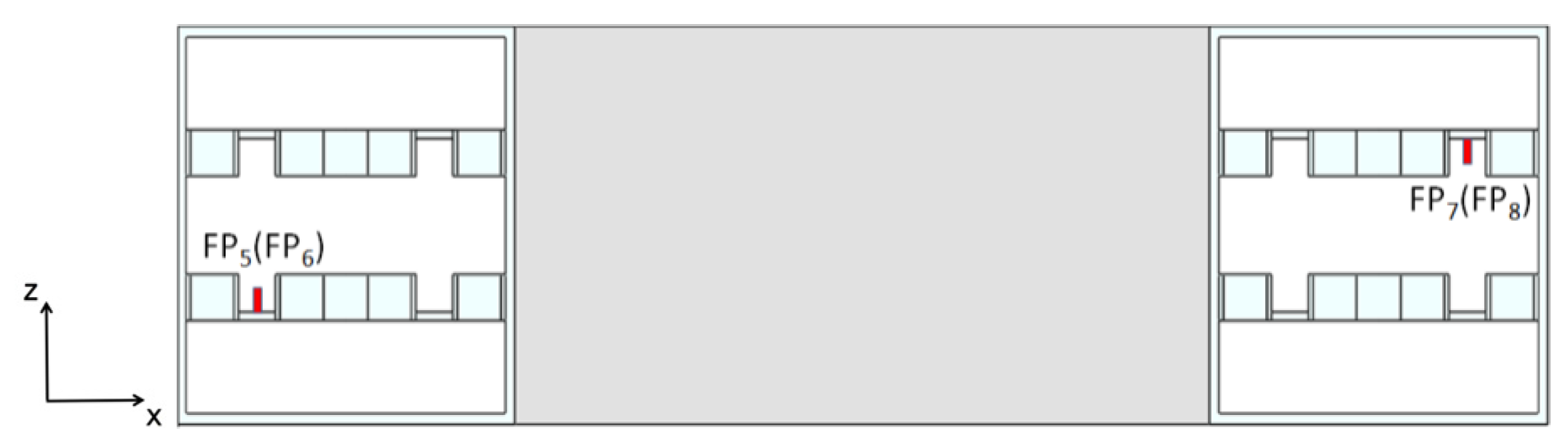
2.4. Design of a Three-Component Optic Fiber Balance
3. Calibration Test of Optic Fiber Balance
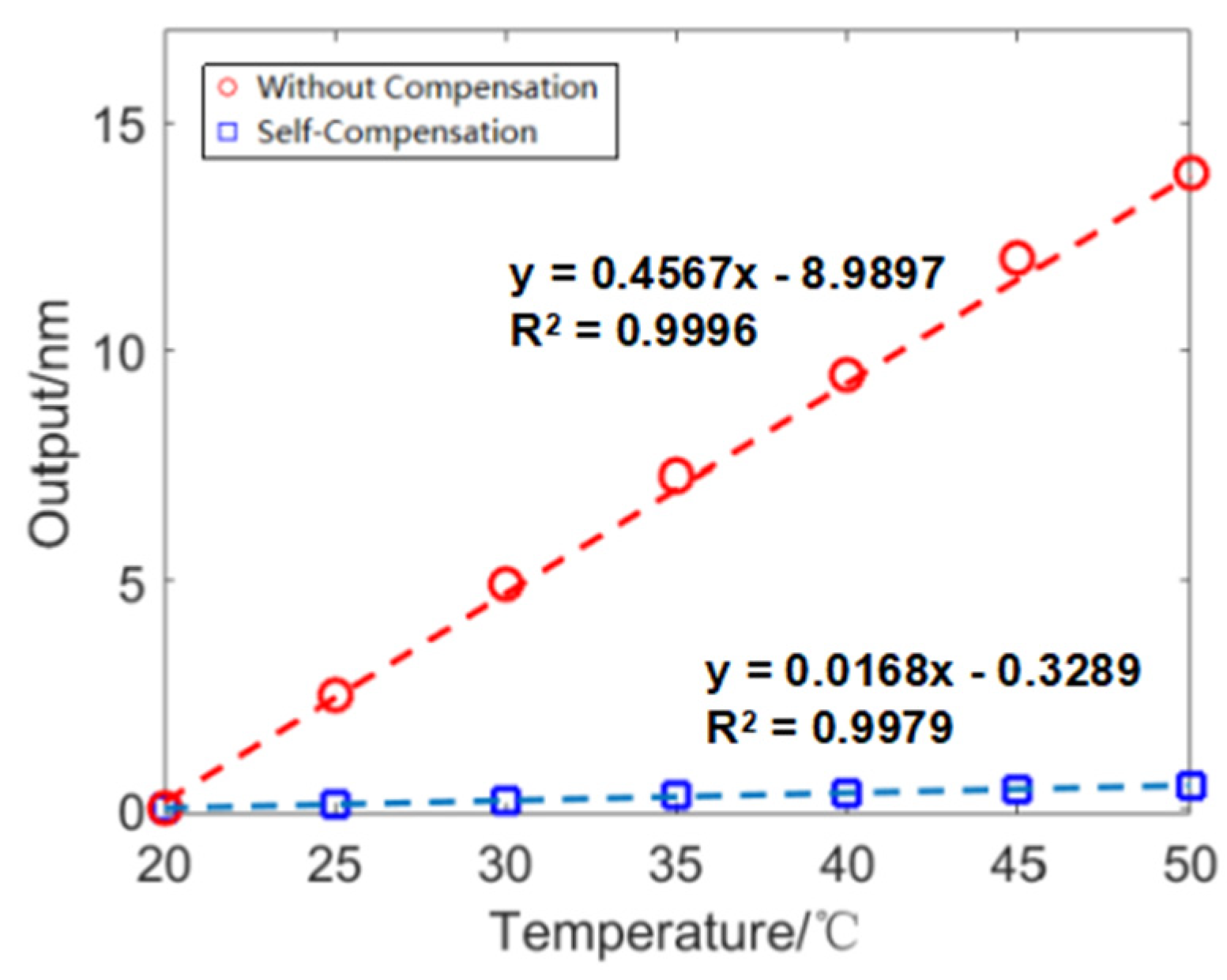
3.1. Temperature Compensation Test
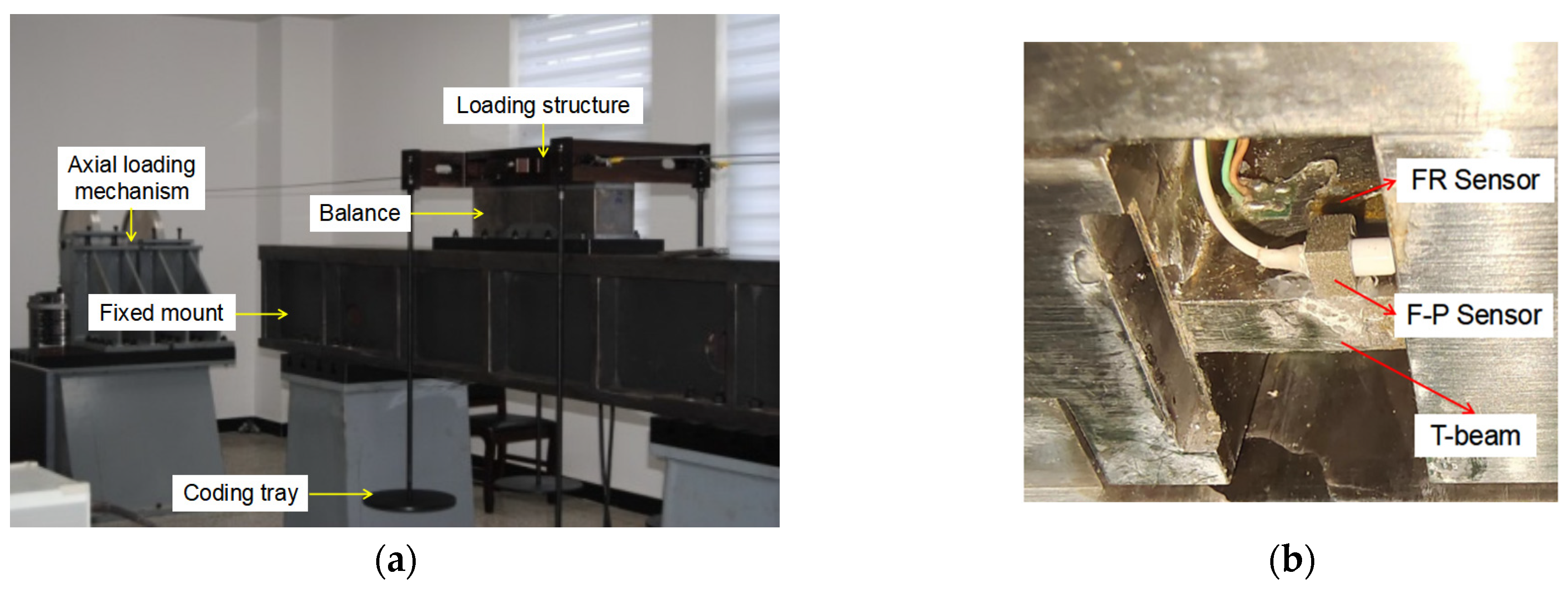
3.2. Calibration Device and Testing
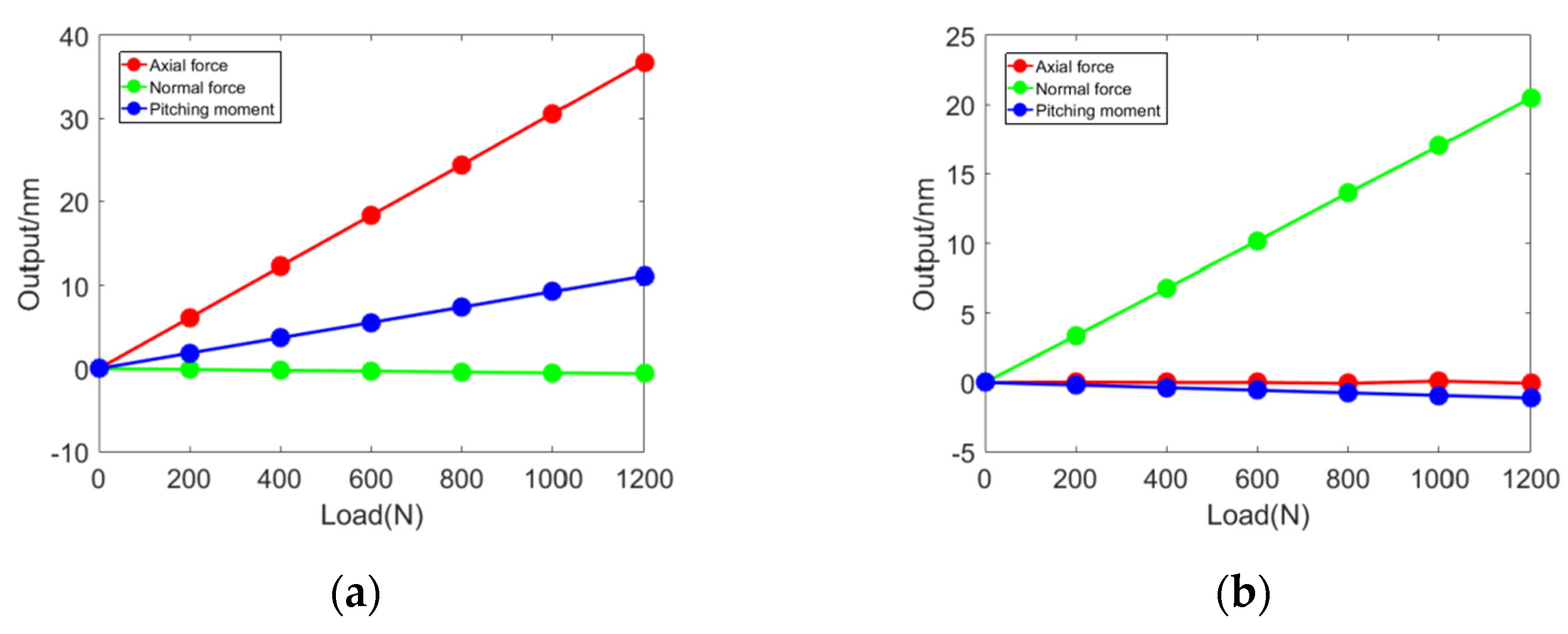
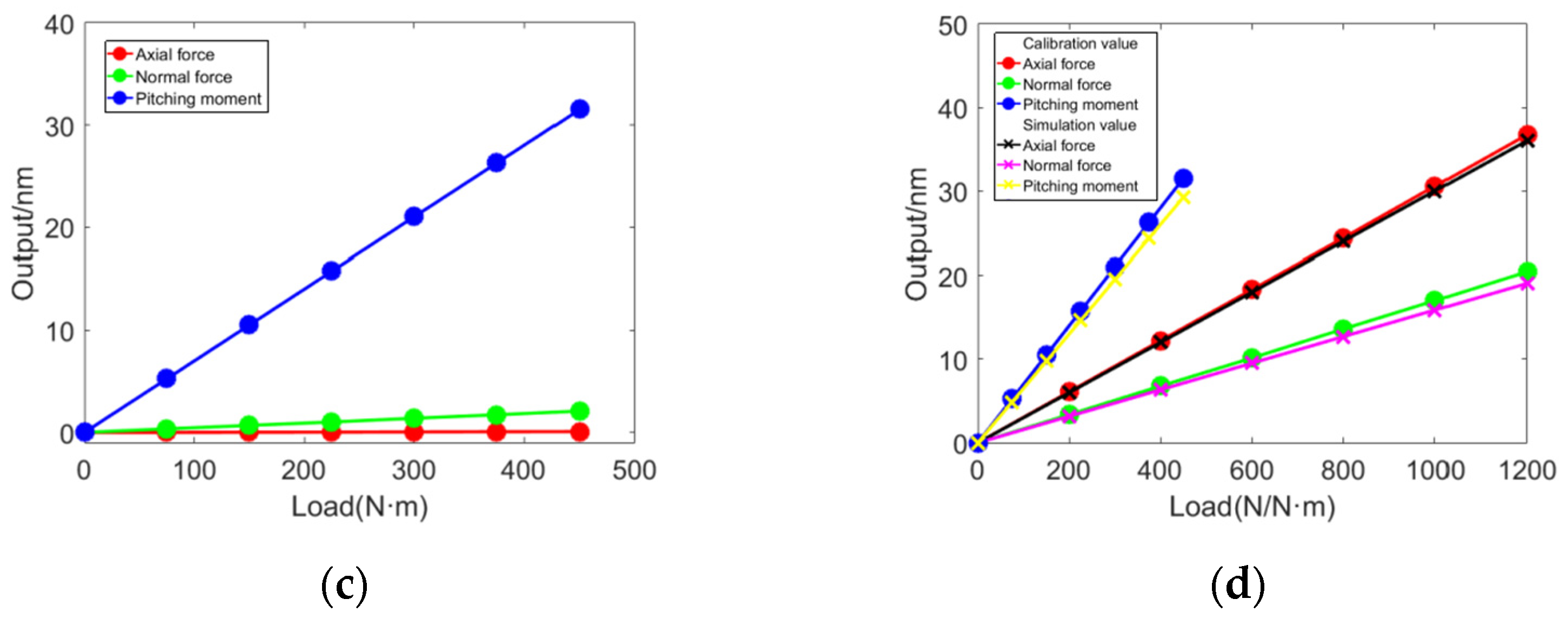
3.3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rockwell, R.R., Jr.; Goyne, C.; Haw, W.; Krauss, R.H.; McDaniel, J.C.; Trefny, C.J. Experimental Study of Test Medium Vitiation Effects on Dual Mode Scramjet Mode Transition. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010. [Google Scholar]
- Li, S.; Sun, Y.; Gao, H.; Zhang, X.; Lv, J. An Interpretable Aerodynamic Identification Model for Hypersonic Wind Tunnels. IEEE Trans. Ind. Inform. 2023, 1–11. [Google Scholar] [CrossRef]
- Yi, S.; Shichao, L.I.; Gao, H.; Zhang, X.; Lv, J.; Liu, W.; Wu, Y. Transfer learning: A new aerodynamic force identification network based on adaptive EMD and soft thresholding in hypersonic wind tunnel. Chin. J. Aeronaut. 2023, 36, 351–365. [Google Scholar]
- Bernstein, L.; Pankhurst, R. Force Measurements in Short-Duration Hypersonic Facilities. AGARDograph 1975, 214, 225. [Google Scholar]
- Jessen, C.; Grönig, H. A new principle for a short-duration six component balance. Exp. Fluids 1989, 8, 231–233. [Google Scholar] [CrossRef]
- Juhany, K.A.; Darji, A. Force Measurement in a Ludwieg Tube Tunnel. J. Spacecr. Rocket. 2007, 44, 88–93. [Google Scholar] [CrossRef]
- Smolinski, G. Proof of Concept for Testing Acceleration Compensation Force Balance Techniques in Short Duration Flows with a CEV Capsule. In Proceedings of the 45th AIAA Aerospace Sciences Meeting & Exhibit, Reston, VA, USA, 8 January 2007. [Google Scholar]
- Wang, Q.; Li, S.; Gao, H.; Lv, J.; Zhang, X.; Liu, W.; Liu, Z. A new force-measuring balance for large-scale model in hypersonic wind tunnel. Rev. Sci. Instrum. 2021, 92, 115005. [Google Scholar] [CrossRef]
- Li, S.; Liu, Z.; Gao, H.; Lv, J.; Zhang, X. A New Airframe/Propulsion-Integrated Aerodynamic Testing Technology in Hypersonic Wind Tunnel. IEEE Trans. Instrum. Meas. 2022, 71, 7502809. [Google Scholar] [CrossRef]
- Li, S.; Zhang, J.; Gao, H.; Liu, Z.; Zhang, X.; Lv, J.; Liu, W. Measurement technology in hypersonic wind tunnel. Measurement 2022, 201, 111633. [Google Scholar] [CrossRef]
- Chandra, K.M.; Srihari, G.K.; Rudresh, C.; Ravi, V.; Karale, S.P.; Padbidri, S.; Gopalan, J.; Vasudevan, N.B. Aerodynamic load measurements at hypersonic speeds using internally mounted fiber-optic balance system. In Proceedings of the 21st International Congress on Instrumentation in Aerospace Simulation Facilities, Sendai, Japan, 29 August–1 September 2005; pp. 119–122. [Google Scholar]
- Vasudevan, B. Measurement of skin friction at hypersonic speeds using fiber-optic sensors. In Proceedings of the AIAA/CIRA 13th International Space Planes and Hypersonics Systems and Technologies Conference, Capua, Italy, 16–20 May 2005; pp. 2005–3323. [Google Scholar]
- Stephens, C.; Hudson, L.; Piazza, A. Overview of an advanced hypersonic structural concept test program. In Proceedings of the FAP Annual Meeting—Hypersonic Project, New Orleans, LA, USA, 30 October–1 November 2007. [Google Scholar]
- Kouzai, M.; Shiohara, T.; Ueno, M.; Komatsu, Y.; Karasawa, T.; Koike, A.; Sudani, N.; Ganaha, Y.; Ikeda, M.; Watanabe, A. Thermal Zero Shift Correction of Strain-Gage Balance Output in the JAXA 2 m × 2 m Transonic Wind Tunnel; JAXA Research and Development Report, JAXA-RR-07-034E; Japan Aerospace Exploration Agency (JAXA): Tokyo, Japan, 2008; ISSN 1349-1113. [Google Scholar]
- Edwards, A.T. Comparison of Strain Gage and Fiber Optic Sensors on a Sting Balance in a Supersonic Wind Tunnel; Virginia Polytechnic Institute and State University: Blacksburg, VA, USA, 2000. [Google Scholar]
- Pieterse, F.F. The Application of Optical Fibre Bragg Grating Sensors to an Internal Wind Tunnel Balance. Ph.D. Thesis, University of Johannesburg, Johannesburg, South Africa, 2010. [Google Scholar]
- Pieterse, F.F. Conceptual design of a six-component internal balance using optical fibre sensors. In Proceedings of the 51st AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 7–10 January 2013; Volume 0547, pp. 1–9. [Google Scholar]
- Qiu, H.; Min, F.; Zhong, S.; Song, X.; Yang, Y. Hypersonic force measurements using internal balance based on optical micromachined Fabry–Perot interferometry. Rev. Sci. Instrum. 2018, 89, 035004. [Google Scholar] [CrossRef] [PubMed]
- Qiu, H.; Min, F.; Yang, Y.; Ran, Z.; Duan, J. Hypersonic aerodynamic force balance using micromachined all-fiber Fabry–Pérot interferometric strain gauges. Micromachines 2019, 10, 316. [Google Scholar] [CrossRef] [PubMed]
- Atherton, P.; Reay, N.; Ring, J.; Hicks, T. Tunable Fabry-Perot Filters. Opt. Eng. 1981, 20, 806. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name | Young’s Modulus (Gpa) | Poisson’s Ratio | Density (kg/m3) |
|---|---|---|---|
| F141 | 187.25 | 0.27 | 8000 |
| Design Parameter | d | h | L1 | L2 | L3 | r1 | r2 |
| Size (mm) | 0.073 | 1 | 3 | 5 | 2 | 0.5 | 0.55 |
| Component | Sensor Combination |
|---|---|
| FA | (FP1 − FP2) + (FP3 − FP4) |
| FN | (FP5 − FP6) + (FP7 − FP8) |
| MZ | (FP5 − FP6) − (FP7 − FP8) |
| Component | FA | FN | MZ |
|---|---|---|---|
| Sensor without Compensation | ~0.46 nm/°C | ||
| Self-Compensation | 0.022 nm/°C | 0.012 nm/°C | 0.031 nm/°C |
| Output | Simulation Sensitivity | Experimental Sensitivity | Linearity | Residual | |
|---|---|---|---|---|---|
| Load | |||||
| FA | 0.0301 nm/N | 0.0306 nm/N | 0.9993 | 0.075782 | |
| FN | 0.0161 nm/N | 0.0171 nm/N | 0.9995 | 0.063471 | |
| MZ | 0.0665 nm/N·m | 0.0701 nm/N·m | 0.9999 | 0.006546 | |
| Output | FA | FN | MZ | |
|---|---|---|---|---|
| Load | ||||
| FA | 100% | 1.64% | 30.3% | |
| FN | - | 100% | 5.48% | |
| MZ | - | 6.63% | 100% | |
| Component | FA | FN | MZ |
|---|---|---|---|
| Maximum load (Kg) | 120 | 120 | 45 |
| Maximum output (nm) | 36.761 | 20.468 | 31.530 |
| Standard deviation | 0.035 | 0.026 | 0.034 |
| Accuracy | 0.1% | 0.13% | 0.11% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, B.; Yu, S.; Zhang, J. Design Method of Three-Component Optic Fiber Balance Based on Fabry–Perot Displacement Sensor. Sensors 2023, 23, 7492. https://doi.org/10.3390/s23177492
Xu B, Yu S, Zhang J. Design Method of Three-Component Optic Fiber Balance Based on Fabry–Perot Displacement Sensor. Sensors. 2023; 23(17):7492. https://doi.org/10.3390/s23177492
Chicago/Turabian StyleXu, Bin, Shien Yu, and Jianzhong Zhang. 2023. "Design Method of Three-Component Optic Fiber Balance Based on Fabry–Perot Displacement Sensor" Sensors 23, no. 17: 7492. https://doi.org/10.3390/s23177492