1. Introduction
To generate one perfect motion using the multiple motors (or actuators), the synchronous motion control has long been an important research topic, and its importance has been emphasized with the recent trend of redundancy design in many mechanical-electrical systems such as automotive, construction, and industrial active systems. For instance, the recent dual-motor-based Steer-by-Wire system in the vehicle requires the synchronous angular position control between two motors to guarantee the reliable and robust fault-tolerant control and produce a large torque [
1,
2,
3,
4,
5]. Ref. [
1] employed the coordinated control of dual steering motors. With dual motor-microcontroller architecture, ref. [
2] developed a control algorithm, allowing the system to reconfigure itself automatically in the event of a single point fault without degrading the control system performance. Ref. [
3] proposed dual-servo synchronization motion control for the angular position tracking of the road wheel reference input by controlling two actuators synchronously and cooperatively.
Refs. [
1,
2,
3] provides the fundamental structure for the synchronous motion control of a multi-motor but have no treatment of model uncertainty and external disturbance.
Furthermore, ref. [
4] proposed the novel master–slave control scheme using both a continuous sliding mode control and a disturbance observer to ensure strong robustness against model uncertainties and external disturbances, but it requires an additional effort for designing a disturbance observer. Ref. [
5] guaranteed a precise, stable, and fast response for the collaborative control of multiple motors using both the conventional PID controller and a radial basis function neural (RBF) network for tuning processing of the PID controller. Here, the control performance increased due to flexible gain of PID via RBF but it will be difficult to implement this scheme with a cost-effective microcontroller.
The synchronous control of a multi-motor is also applied to the conveyer belt system and continuous production line system [
6,
7]. Ref. [
6] presented the practical control strategy of multi-motor drives of high-power belt conveyors and [
7] designed the fuzzy model-based optimal control of a continuous production line using multi-motors.
Furthermore, this synchronous motion control technique is used for the driving system in an electrical vehicle [
8,
9] and a robotic manipulator [
10], as well as a gantry crane system [
11]. Ref. [
8] points out that the electrical vehicle must be a fault-tolerant system, (i.e., multi-motor-based driving system) and [
9] described the implementation of the electrical vehicle drive control algorithm with torque distribution on an FPGA platform. Ref. [
10] proposed the cross-coupling ring control based on the fuzzy theory (CRCF) for the multi-motor coordinated control of intelligent robots. Ref. [
11] showed the application of adjustable speed induction motor drives for the gantry cranes. Regarding [
6,
7,
8,
9,
10,
11], due to the absence of (or partial) compensation for parametric uncertainty and external disturbance, the control performance will be sensitive to those disturbing effects.
Moreover, for a decade, many synchronous control schemes of multi-motor systems have been proposed [
12,
13,
14,
15,
16,
17,
18,
19,
20,
21]. Refs. [
12,
13,
14] proposed the passivity based synchronous control approach for a tele-operated manipulator system by introducing the concept of passivity and the passive decomposition technique. Ref. [
12] guarantees synchronized motion between master and slave using the passivity observer and controller. Ref. [
13] investigated a passive bilateral feed-forward control scheme for linear dynamically similar (LDS) tele-operated master–slave manipulator. The proposed technique is robust for model uncertainty and inaccuracy of force measurements and individually secures the aspects for the coordination error and overall motion. Furthermore, ref. [
14] proposed a passive bilateral tele-operation synchronous control law for the multiple DOF nonlinear master–slave robotic systems using the passive decomposition for 2n-DOF nonlinear tele-operated dynamics without contravening passivity. Although [
12,
13,
14] are pioneering works for synchronous motion control for tele-operating manipulator systems using the concept of passive decomposition, the effectiveness and robustness of designed controllers have been tested with advanced and expensive motors (vs. cost-effective ones featured with a high dead-zone property).
In line with [
12,
13,
14,
15,
16], they applied the cross-coupling scheme structure to the synchronous speed control of multiple-motor. Ref. [
15] presents a control scheme of synchronous motion based on the artificial potential field and cross-coupled structure and, ref. [
16] introduced an adjacent cross-coupling synchronous control to address the problem of phase and speed synchronization control of multi-exciters in vibration. Even though well-structured control systems using every synchronous combination between agents are developed in [
15,
16], the effectiveness of the control systems was only validated through a semi-physical model [
15] or simulation [
16].
Refs. [
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27] used the sliding mode control technique, fuzzy sliding mode control, and adaptive control to achieve the synchronous motion control. Ref. [
17] described the fuzzy adaptive sliding mode controller for uncertain nonlinear multi-motor systems to address the chattering problem in the two-motor synchronization problem. Ref. [
18] designed a sliding mode (SM) feedback linearization control system for a multi-motors web winding system. Refs. [
17,
18] presented only simulation results based on limited control scenarios and the direct extension of a control strategy for
n arbitrary agents is also doubtful. Ref. [
19] proposed the multi-motor improved relative coupling cooperative control based on a sliding mode controller, and showed a more significant control effect on the system error of each motor in comparison with the traditional relative coupling control structure. However, the effectiveness of the control system was only validated through the tracking of constant speed. Ref. [
20] used the second Lyapunov method together with a reference model to ensure asymptotic stability of a Continuous Strip Processing Line with Multi-Motor Drive but requires relatively exact parameters of the system to achieve accurate control. Ref. [
21] proposes an adaptive output feedback controller for the multi-motor driving system to guarantee all the tracking errors constrained within the prescribed bounds. And, a modified barrier Lyapunov function (MBLF) is applied to derive the adaptive law in the proposed control system. Here, the adaptive tuning law could lead to unwanted results if the system runs with the control scenario containing no (or a little) persistent excitation. Furthermore, ref. [
22] presented a hybrid adaptive fuzzy multi-agent consensus scheme for leader-follower multi-motor speed coordination. Here, it is found that the performance of the control system highly depends on the fuzzy sets, thus the sets may be tuned whenever the desired trajectory is changed. Ref. [
23] proposed an adaptive robust H-infinity control scheme, combining a robust tracking controller with a distributed synchronization controller, to guarantee both the load tracking and synchronization. Ref. [
24] designed an adaptive control strategy based on the optimal sliding surface for multi-motor driving systems along with a leaky echo state network-based observer. Due to the complicated design of the control system and observer in [
23,
24], the practical application of [
23,
24] may be challenging as a cost-effective micro-controller. Recently, ref. [
25] proposed synchronous motion control between the actuators in a 2-DOF tele-operating system using passive decomposition, sliding mode control as well as an RLS filter to deal with the dead-zone effect of the actuator. Ref. [
25] requires extra effort to estimate the dead-zone parameters via the RLS filter.
To maximize the control performance of a PMSM, a new IDA-PBC paired with a high order sliding mode and non-linear observer technique is proposed in [
26]. In [
27], a novel generalized non-linear robust predictive controller has been explored for aiming the tracking reference speed of PMSM, ensuring robustness to external disturbances and parameters. However, the validity of proposed schemes in [
26,
27] must be tested with an actual implementation containing various control scenarios since [
26] used relatively high control gains and [
27] is designed under the assumption that the disturbance is slow and has a simple scenario. Ref. [
28] proposed a novel control strategy using a composite sliding mode observer (back-EMF error extraction) with a modified feed-forward phase-locked loop (PLL) for ensuring high accuracy position and speed control of shaftless RDT (rim-driven thruster) motors. The limitation of [
28] relies on the fact that the rate of change of the motor speed is small when designing the observer, and the validity of the proposed method is investigated only by simulation.
Ref. [
29] provides the holistic reviews of the multi-motor control strategies for automotive applications along with the fault-tolerant multi-motor drive topologies.
In this paper, in the line with many control techniques [
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26,
27,
28], based on the ideas of both the passive decomposition [
12,
13,
14] and sliding mode control techniques [
17,
18,
19,
20,
21,
25] without any adaptive compensation law [
4,
5,
17,
21,
22,
23,
24], a novel passive decomposition-based robust synchronous motion control of multi-motors is presented.
Specifically, based on a passive decomposition, the locked and shape system is achieved from the original system. This implies that the controllers for each system (locked + shaped system) reduce not only the tracking errors (locked motion) of motors for a given desired trajectory but also the synchronous errors between motors (shape motion).
And then a robust high-order sliding mode control along with additional compensation components for model uncertainty and external disturbance is designed for each decomposed system. Unlike [
17,
18,
19], the high-order sliding surface (including an integral of error) used here attenuates the influence of external disturbances more effectively than a control using a standard first-order sliding surface. This point of view is briefly mentioned in
Appendix A.
In this study, besides the high-order sliding mode control, the control system additionally contains two separate compensation terms for rejecting both model uncertainty and external disturbance to achieve further robustness of the entire system.
These two compensation terms are designed by a simple but effective signum (or sat) function. Therefore, the control system proposed here is designed in a relatively pragmatic manner for better implementation in cost-effective ECUs by avoiding the inclusion of any adaptive control strategies (i.e., the integral type of adaptive tuning law) consuming more computational load and sometimes leading in the wrong direction when the tuning law produces unwanted outcomes.
The final control law is obtained via a transformation matrix from locked and shape coordinates to the original one. Furthermore, the technique presented here is systematically formulated to use and adopt the arbitrarily n number of agents that must be synchronously controlled and track the desired trajectory. The frame of this technique can be generally extended to any multi-motor driving setting.
Compared to several works [
15,
16,
17,
18,
22,
23,
26,
27], to validate the effectiveness of the proposed synchronous control strategy, the extensive experimental studies on 2/3/4-geared cost-effective BLDC motors were also performed based on two representative control scenarios (sine-wave and trapezoidal trajectories).
Moreover, the other representative control approaches, a master–slave control scheme and an independent one, were introduced here, and the proposed control method was compared and evaluated with these control methods.
According to the contributions above, this work will be a valuable asset for those who wish to systematically design the synchronous motion control of a multi-motor system in any field.
The rest of this paper is as follows.
Section 2 and
Section 3 present the problem formulation and passive decomposition technique, respectively. Furthermore, the synchronous control scheme is described in
Section 4, other control approaches are presented in
Section 5, and the experimental tests and results are included in
Section 6. Finally, the conclusions are remarked.
3. Passive Decomposition
In this section, we decomposed the set of dynamics in (2) into two systems according to two aspects, gross motion (i.e., locked system) and coordination (i.e, shape system). Ref. [
12] shows that, for LDS, the two decomposed systems can be individually controlled, and as long as the individual controller guarantees that each closed-loop system is energetically passive, the combined system is also energetically passive.
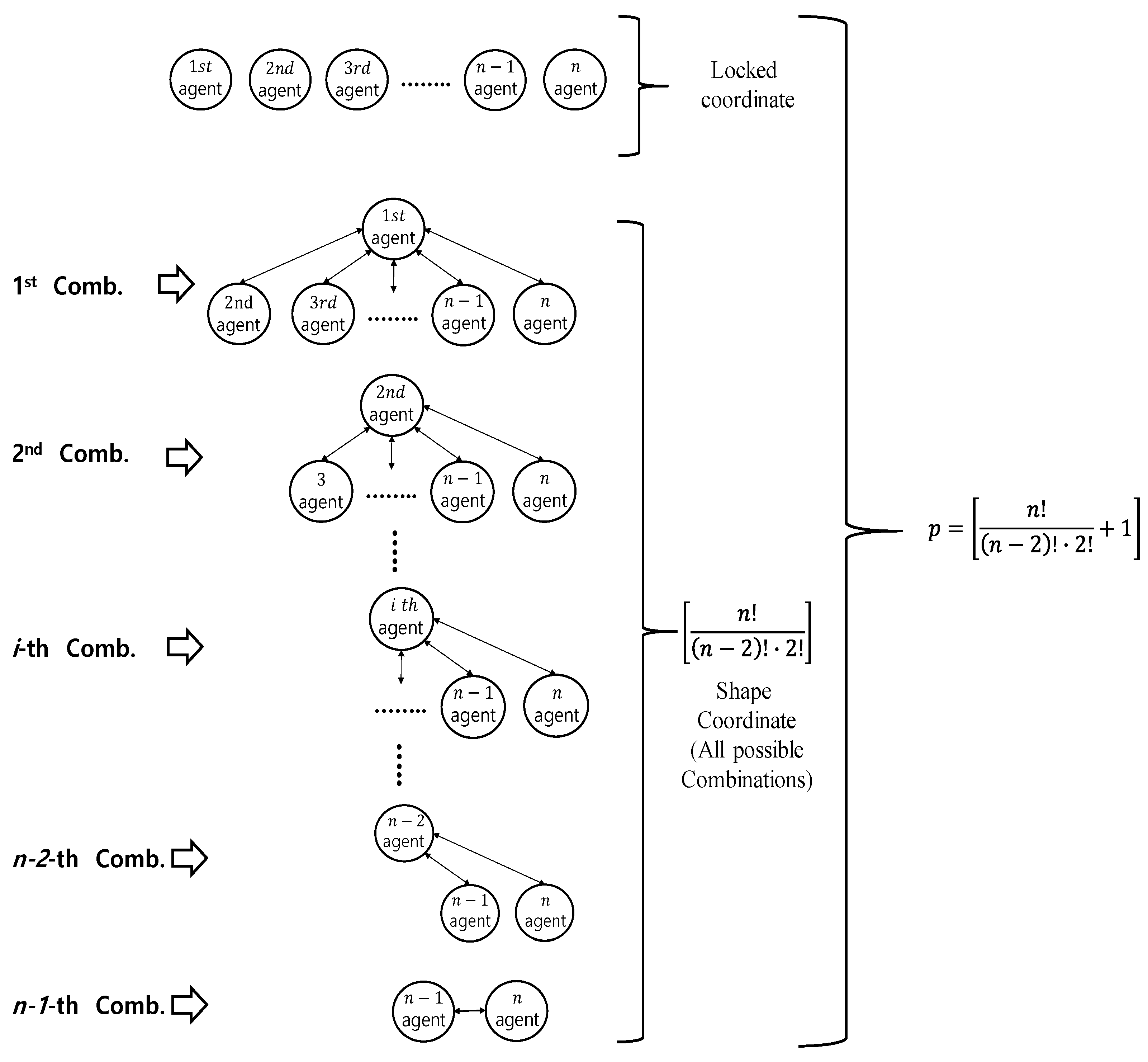
There is only one gross motion (i.e., a locked coordinate) regardless of how many agents are synchronously controlled. However, for n agents, the number of possible coordinates in the shape system can have multiple choices. In this study, we consider all combinations between the two agents (i.e., fully cross-coupled network structure).
Therefore,
Figure 1 shows
n agents to be controlled, describing one case for a locked system and all possible combinations of pairs between agents for the shape system.
Specifically, the entire coordinates, a locked one and the shaped ones, are given by [
12,
13,
25]
where
is a locked coordinate and
is the shaped coordinate vector.
And, the notation in (5) is the difference between angular rotational positions of motors, , the m-th and n-th ones in every combination.
Based on (4) and (5), proposing the transformation matrix from the physical coordinate
to the locked-shape coordinates,
where the sub-notation
p in (6) is defined as
.
And, and for i = 2,. Both and are zero matrices and identity matrices with the proper dimensions specified in (6).
Using (6), the relation between
and the physical coordinates,
, is given by
Furthermore, (7) becomes
where
. And it should be noted that the pseudo inverse matrix
(i.e, rank(
) =
n) is used due to the fact that
may not be a square matrix (i.e,
). If
is a square matrix, the inverse matrix will be used.
Using (8), the original dynamics can be transformed into the locked and shape systems.
On the other hand, another form of (2) is given by
Substituting (8) into (9) and then multiplying
to the both sides of the result yield
where
,
, and
And, the partitions of matrices and vectors according to
and
in (10) is shown,
For clear understanding, the dimension of each component in (11) and (12) is specified: , , , ,, , , and .
Specifically, based on (11) and (12), (10) becomes
(13) and (14) represent the decomposed system, a locked system, and a shape system, respectively. In the next Section, each control system for the decomposed system in (13) and (14) will be designed using sliding mode control and robust compensation term for rejecting both parametric uncertainty and external disturbance.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}