
Development of a Cloud-Based Image Processing Health Checkup System for Multi-Item Urine Analysis

Abstract
:1. Introduction
1.1. Related Works
1.2. Contributions
2. Materials and Methods
2.1. Server
2.2. Mobile Application
2.3. Hardware
2.4. Perspective Transformation
2.5. Block Positioning
2.6. Color Calibration
2.7. Color Comparison
2.8. Standard Sample Correction
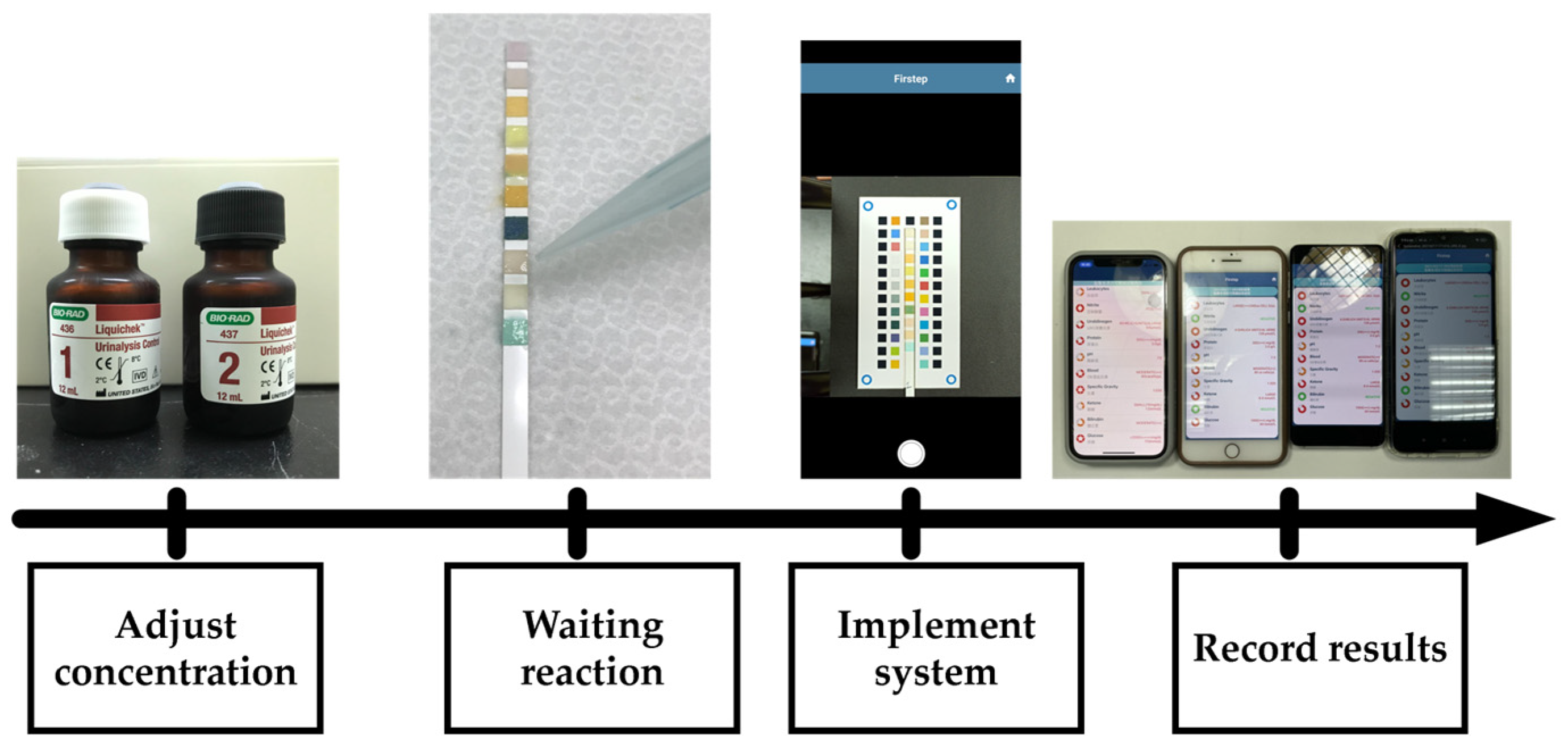
2.9. Experimental Method
3. Results
4. Discussion
4.1. Experiments in Different Environments
4.2. Challenges
4.3. Future Works
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sung, W.C.; Hung, C.T.; Chen, W.Y. Medical utilization and comorbidity among aging population in Taiwan. Taiwan J. Gerontol. Health Res. 2008, 4, 75–87. [Google Scholar]
- Rojanathanes, R.; Sereemaspun, A.; Pimpha, N.; Buasorn, V.; Ekawong, P.; Wiwanitkit, V. Gold nanoparticle as an alternative tool for a urine pregnancy test. Taiwan J. Obstet. Gynecol. 2008, 47, 296–299. [Google Scholar] [CrossRef] [PubMed]
- Rose, C.; Parker, A.; Jefferson, B.; Cartmell, E. The characterization of feces and urine: A review of the literature to inform advanced treatment technology. Crit. Rev. Environ. Sci. Technol. 2015, 45, 1827–1879. [Google Scholar] [CrossRef] [PubMed]
- Münch, E.V.; Winker, M. Technology Review of Urine Diversion Components; Gesellschaft für Internationale Zusammenarbeit (GIZ) GmbH: Eschborn, Germany, 2011; pp. 11–13. [Google Scholar]
- Kutter, D. The urine test strip of the future. Clin. Chim. Acta 2000, 297, 297–304. [Google Scholar] [CrossRef]
- Rodriguez, M. A graphic arts perspective on RGB-to-CMYK conversion. In Proceedings of the International Conference on Image Processing, Washington, DC, USA, 23–26 October 1995. [Google Scholar]
- Schwarz, M.W.; Cowan, W.B.; Beatty, J.C. An experimental comparison of RGB, YIQ, LAB, HSV, and opponent color models. ACM Trans. Graph. 1987, 6, 123–158. [Google Scholar] [CrossRef]
- Smith, A.R. Color Gamut Transform Pairs. In Proceedings of the SIGGRAPH 1978: Proceedings of the 5th Annual Conference on Computer Graphics and Interactive Techniques, Atlanta, GA, USA, 23–25 August 1978. [Google Scholar]
- Chernov, V.; Alander, J.; Bochko, V. Integer-based accurate conversion between RGB and HSV color spaces. Comput. Electr. Eng. 2015, 46, 328–337. [Google Scholar] [CrossRef]
- Raja, R.; Roomi, S.M.M.; Dharmalakshmi, D. Robust indoor/outdoor scene classification. In Proceedings of the 2015 Eighth International Conference on Advances in Pattern Recognition (ICAPR), Kolkata, India, 4–7 January 2015. [Google Scholar]
- Pascale, D. RGB Coordinates of the Macbeth ColorChecker; The BabelColor Company: Montreal, QC, Canada, 2006; Volume 6. [Google Scholar]
- Chang, Y.C.; Reid, J.F. RGB calibration for color image analysis in machine vision. IEEE Trans. Image Process. 1996, 5, 1414–1422. [Google Scholar] [CrossRef] [PubMed]
- Durresi, M.; Luarasi, T.; Baholli, I.; Durresi, A. Targeted Advertisement Using Smartphones and Cloud Computing. In Proceedings of the 2013 16th International Conference on Network-Based Information Systems, Seo-gu, Republic of Korea, 4–6 September 2013. [Google Scholar]
- Hansen, J.; Grønli, T.M.; Ghinea, G. Towards cloud to device push messaging on Android: Technologies, possibilities and challenges. Int. J. Commun. Netw. Syst. Sci. 2012, 5, 839–849. [Google Scholar] [CrossRef]
- Ra, M.; Muhammad, M.S.; Lim, C.; Han, S.; Jung, C.; Kim, W.-Y. Smartphone-based point-of-care urinalysis under variable illumination. IEEE J. Transl. Eng. Health Med. 2017, 6, 2800111. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Boyd, R.; Mitchell, R.; Wright, W.D.; McCracken, C.; Escoffery, C.; Ratzer, R.E.; Greenbaum, L.A. Development of a novel mobile application to detect urine protein for nephrotic syndrome disease monitoring. BMC Med. Inform. Decis. Mak. 2019, 19, 105. [Google Scholar] [CrossRef] [PubMed]
- Kibria, I.E.; Ali, H.; Khan, S.A. Smartphone-Based Point-of-Care Urinalysis Assessment. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Scotland, UK, 11–15 July 2022. [Google Scholar]
- Do, Y. On the neural computation of the scale factor in perspective transformation camera model. In Proceedings of the 10th IEEE International Conference on Control and Automation (ICCA), Hangzhou, China, 12–14 June 2013. [Google Scholar]
- Finlayson, G.D.; Mackiewicz, M.; Hurlbert, A. Color calibration using root-polynomial regression. IEEE Trans. Image Process. 2015, 24, 1460–1470. [Google Scholar] [CrossRef] [PubMed]
- Dasari, H.; Bhagvati, C.; Jain, R.K. Distance Measures in RGB and HSV Color Spaces. In Proceedings of the 20th International Conference on Computers and Their Applications, Holiday Inn Downtown-Superdome Hotel, New Orleans, LA, USA, 16–18 March 2005. [Google Scholar]
- Cullen, J.J.; MacIntyre, H.L. On the use of the serial dilution culture method to enumerate viable phytoplankton in natural communities of plankton subjected to ballast water treatment. J. Appl. Phycol. 2016, 28, 279–298. [Google Scholar] [CrossRef] [PubMed]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | H | S | V |
|---|---|---|---|
| (a) | 55 | 56 | 242 |
| (b) | 47 | 43 | 219 |
| Item | 0% | 12.5% | 25% | 50% | 100% |
|---|---|---|---|---|---|
| Leukocytes | 85% | 82.5% | 100% | 100% | 100% |
| Nitrite | 100% | 100% | 100% | 100% | 100% |
| Urobilinogen | 75% | 97.5% | 92.5% | 55% | 62.5% |
| Protein | 100% | 100% | 100% | 100% | 100% |
| pH | 97.5% | 100% | 100% | 75% | 85% |
| Blood | 97.5% | 100% | 100% | 95% | 100% |
| Specific Gravity | 100% | 100% | 100% | 100% | 100% |
| Ketone | 100% | 100% | 100% | 100% | 100% |
| Bilirubin | 32.5% | 100% | 100% | 100% | 100% |
| Glucose | 100% | 100% | 95% | 80% | 87.5% |
| Item | 0% | 12.5% | 25% | 50% | 100% |
|---|---|---|---|---|---|
| Leukocytes | 100% | 100% | 100% | 100% | 100% |
| Nitrite | 100% | 100% | 100% | 100% | 100% |
| Urobilinogen | 100% | 100% | 100% | 100% | 95% |
| Protein | 100% | 100% | 100% | 100% | 100% |
| pH | 100% | 97.5% | 100% | 100% | 100% |
| Blood | 100% | 100% | 100% | 100% | 100% |
| Specific Gravity | 100% | 100% | 100% | 100% | 100% |
| Ketone | 100% | 100% | 100% | 100% | 100% |
| Bilirubin | 100% | 100% | 100% | 100% | 100% |
| Glucose | 100% | 100% | 100% | 100% | 100% |
| Item | 0% | 12.5% | 25% | 50% | 100% |
|---|---|---|---|---|---|
| Leukocytes | 100% | 100% | 100% | 100% | 100% |
| Nitrite | 100% | 97.5% | 100% | 100% | 100% |
| Urobilinogen | 100% | 100% | 100% | 100% | 95% |
| Protein | 100% | 100% | 100% | 100% | 100% |
| pH | 100% | 100% | 100% | 100% | 100% |
| Blood | 100% | 100% | 100% | 100% | 100% |
| Specific Gravity | 100% | 100% | 97.5% | 100% | 100% |
| Ketone | 100% | 100% | 100% | 100% | 100% |
| Bilirubin | 100% | 100% | 100% | 100% | 100% |
| Glucose | 100% | 100% | 100% | 100% | 100% |
| Environment | Min Illuminance | Max Illuminance |
|---|---|---|
| Stair corner | 5 lux | 11 lux |
| Indoor, kitchen | 31 lux | 52 lux |
| Indoor, work area | 328 lux | 467 lux |
| Indoor, office area | 392 lux | 518 lux |
| Arcade | 883 lux | 1464 lux |
| Outdoor | 2460 lux | 4820 lux |
| Environment | 0% | 12.5% | 25% | 50% | 100% |
|---|---|---|---|---|---|
| Stair corner | 95% | 92.5% | 90% | 90% | 97.5% |
| Indoor, kitchen | 95% | 80% | 92.5% | 90% | 97.5% |
| Indoor, work area | 100% | 97.5% | 95% | 100% | 97.5% |
| Indoor, office area | 100% | 97.5% | 100% | 95% | 97.5% |
| Arcade | 90% | 90% | 92.5% | 82.5% | 97.5% |
| Outdoor | 70% | 67.5% | 85% | 67.5% | 85% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, Y.-L.; Wang, C.-S.; Weng, W.-C.; Lin, Y.-C. Development of a Cloud-Based Image Processing Health Checkup System for Multi-Item Urine Analysis. Sensors 2023, 23, 7733. https://doi.org/10.3390/s23187733
Wu Y-L, Wang C-S, Weng W-C, Lin Y-C. Development of a Cloud-Based Image Processing Health Checkup System for Multi-Item Urine Analysis. Sensors. 2023; 23(18):7733. https://doi.org/10.3390/s23187733
Chicago/Turabian StyleWu, Yu-Lin, Chien-Shun Wang, Wei-Chien Weng, and Yu-Cheng Lin. 2023. "Development of a Cloud-Based Image Processing Health Checkup System for Multi-Item Urine Analysis" Sensors 23, no. 18: 7733. https://doi.org/10.3390/s23187733
APA StyleWu, Y.-L., Wang, C.-S., Weng, W.-C., & Lin, Y.-C. (2023). Development of a Cloud-Based Image Processing Health Checkup System for Multi-Item Urine Analysis. Sensors, 23(18), 7733. https://doi.org/10.3390/s23187733