
Characterizing Bodyweight-Supported Treadmill Walking on Land and Underwater Using Foot-Worn Inertial Measurement Units and Machine Learning for Gait Event Detection

Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Protocol
2.1.1. Subject Information
2.1.2. On-Land Body-Weight-Supported Treadmill Walking
2.1.3. Underwater Bodyweight-Supported Treadmill Walking
2.2. Data Analysis
2.2.1. On-Land Body-Weight-Supported Treadmill Walking Data
2.2.2. Underwater Bodyweight-Supported Treadmill Walking Data
2.3. Features and Classifications
2.3.1. Gait Event Detection during Bodyweight-Supported Treadmill Walking on Land
2.3.2. Gait Event Detection during Underwater Bodyweight-Supported Treadmill Walking
2.3.3. Classification Evaluation
2.4. Data Similarity Analysis
3. Results
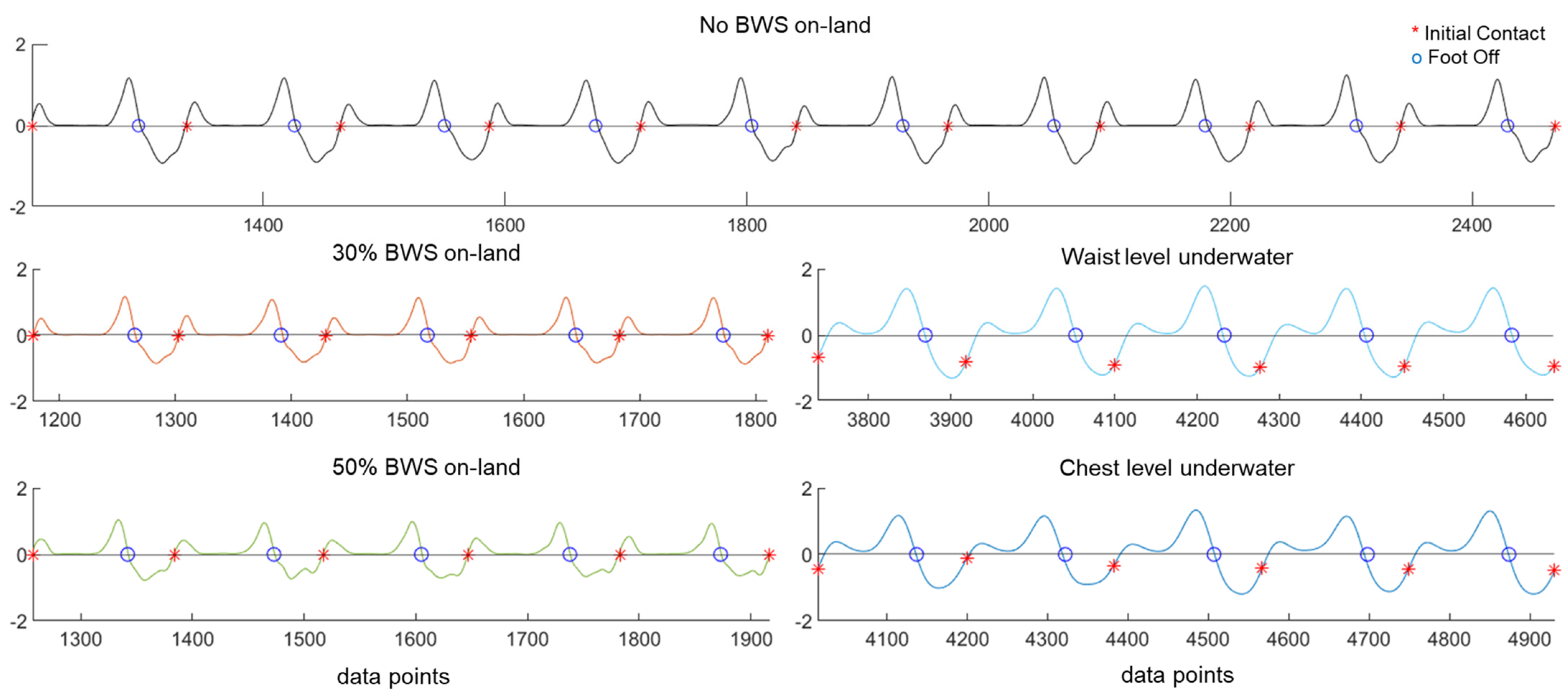
3.1. Sagittal Plane Foot Segment Angular Velocity Characteristics
3.2. Gait Event Detection during Bodyweight-Supported Treadmill Walking on Land
3.2.1. Training (80% Data): No BWS, Test (100% Data): BWS on Land (Table 2 and Figure 3A)

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Data | Test Data | Gait Events | Precision | Recall | F1-Score | Accuracy (10-Fold Cross Validation) |
|---|---|---|---|---|---|---|
| No BWS on-land 80% | BWS on-land 100% | NaN | 0.97 | 0.98 | 0.97 | 0.95 |
| IC | 0.86 | 0.85 | 0.86 | |||
| FO | 0.87 | 0.85 | 0.86 | |||
| BWS on-land (10 subjects) | BWS on-land (2 subjects) | NaN | 0.97 | 0.97 | 0.97 | 0.95 |
| IC | 0.79 | 0.82 | 0.80 | |||
| FO | 0.88 | 0.86 | 0.87 | |||
| BWS on-land 80% | Underwater 100% | NaN | 0.90 | 0.75 | 0.82 | 0.71 |
| IC | 0.07 | 0.16 | 0.10 | |||
| FO | 0.30 | 0.62 | 0.40 | |||
| Underwater (2 subjects) | Underwater (1 subject) | NaN | 0.94 | 0.95 | 0.94 | 0.89 |
| IC | 0.49 | 0.41 | 0.44 | |||
| FO | 0.66 | 0.61 | 0.64 |
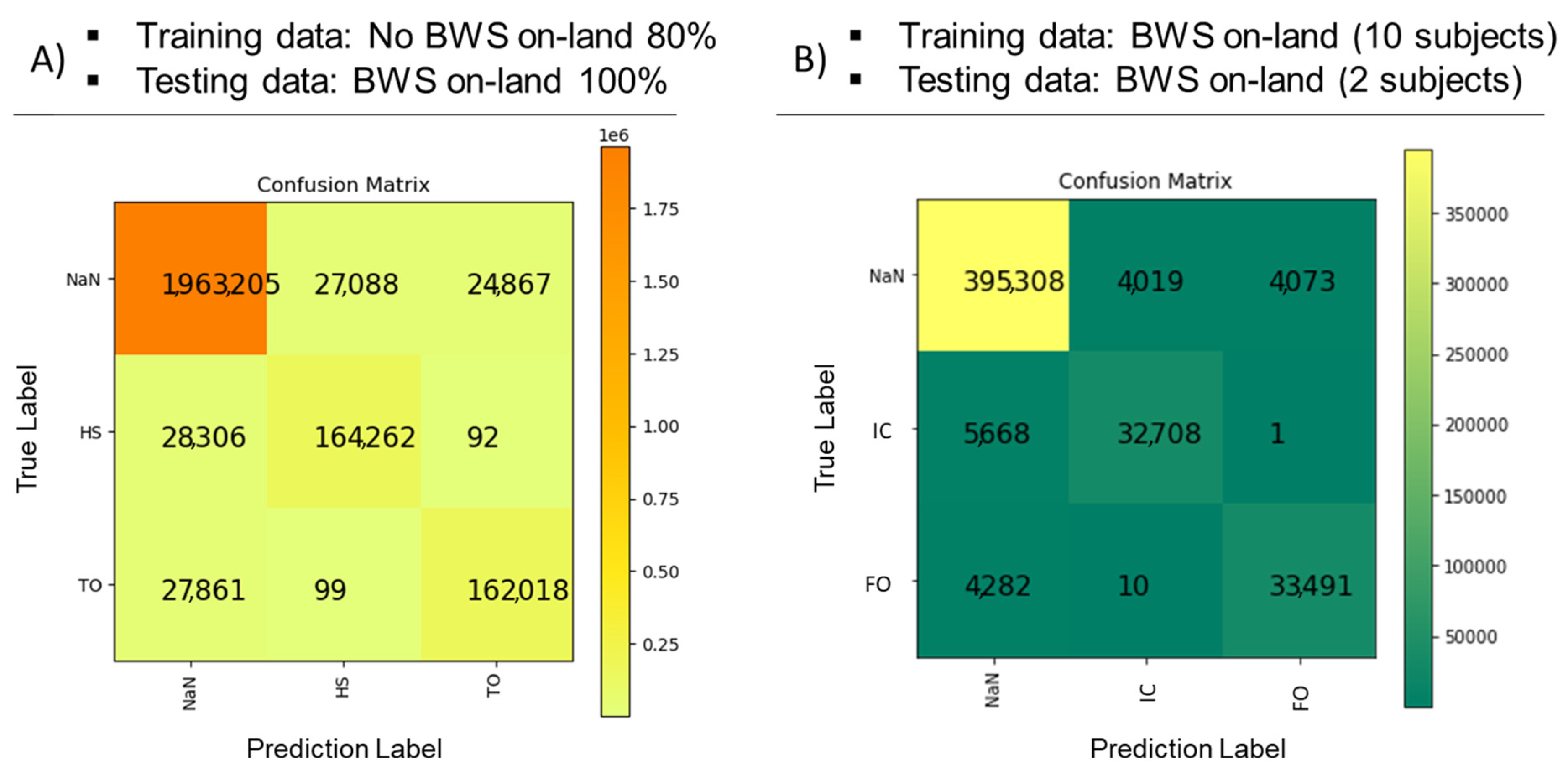
3.2.2. Training (Ten Subjects’ Data): BWS on Land, Test (Two Subjects’ Data): BWS on Land (Table 2 and Figure 3B)
3.3. Gait Event Detection during Underwater Bodyweight-Supported Treadmill Walking
3.3.1. Training (80% Data): BWS on Land, Test (100% Data): Underwater BWS (Table 2 and Figure 4A)

3.3.2. Training (Two Subjects’ Data): Underwater BWS and Test Data (One Subject’s Data): Underwater BWS (Table 2 and Figure 4B)
4. Discussion
4.1. Contrasting Sagittal Plane Foot Segment Angular Velocity during Bodyweight-Supported Treadmill Walking on Land and Underwater
4.2. Gait Event Detection during Bodyweight-Supported Treadmill Walking
4.3. Limitations and Future Directions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
| Training Data | Test Data | Gait Events | Approach 1 (Data Augmentation) | Approach 2 (Define the Gait Event to Stance and Swing Phase) |
|---|---|---|---|---|
| No BWS on-land 80% | BWS on-land 100% | IC | 0.27 ± 1.44 | 1.21 ± 1.30 |
| FO | 0.24 ± 0.72 | 1.15 ± 1.80 | ||
| BWS on-land 80% | BWS on-land 20% | IC | 0.55 ± 1.79 | 1.26 ± 0.99 |
| FO | 0.35 ± 1.34 | 1.07 ± 0.89 | ||
| BWS on-land 80% | Underwater 100% | IC | 9.83 ± 6.56 | 14.00 ± 7.09 |
| FO | 0.96 ± 3.06 | 4.78 ± 5.12 | ||
| Underwater 80% | Underwater 20% | IC | 2.46 ± 4.79 | 5.66 ± 4.21 |
| FO | 1.51 ± 3.63 | 4.21 ± 4.57 |
Appendix B
| Decision Tree | Random Forest | k-Nearest Neighbor (k = 100) | Support Vector Machine | ||
|---|---|---|---|---|---|
| Precision | NaN | 0.97 | 0.98 | 0.96 | 0.94 |
| IC | 0.83 | 0.89 | 0.91 | 0.89 | |
| FO | 0.84 | 0.89 | 0.90 | 0.88 | |
| Recall | NaN | 0.97 | 0.98 | 0.98 | 0.98 |
| IC | 0.82 | 0.85 | 0.76 | 0.64 | |
| FO | 0.84 | 0.89 | 0.84 | 0.65 | |
| F1-score | NaN | 0.78 | 0.98 | 0.97 | 0.96 |
| IC | 0.08 | 0.87 | 0.83 | 0.74 | |
| FO | 0.41 | 0.89 | 0.87 | 0.75 | |
| Computational time (mean ± standard deviation of 7 runs) | 1 min 8 s ± 2.13 s | 22 min 48 s ± 17.6 s | 3 min 4 s ± 6.92 s | 11 h 57 min 21 s ± 5 min 42 s | |
References
- Giladi, N.; Horak, F.B.; Hausdorff, J.M. Classification of gait disturbances: Distinguishing between continuous and episodic changes. Mov. Disord. 2013, 28, 1469–1473. [Google Scholar] [CrossRef] [PubMed]
- Jahn, K.; Zwergal, A.; Schniepp, R. Gait disturbances in old age: Classification, diagnosis, and treatment from a neurological perspective. Dtsch. Ärzteblatt Int. 2010, 107, 306. [Google Scholar]
- Kong, W.; Sessa, S.; Cosentino, S.; Zecca, M.; Saito, K.; Wang, C.; Imtiaz, U.; Lin, Z.; Bartolomeo, L.; Ishii, H. Development of a real-time IMU-based motion capture system for gait rehabilitation. In Proceedings of the 2013 IEEE International Conference on Robotics and Biomimetics (ROBIO), Shenzhen, China, 12–14 December 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 2100–2105. [Google Scholar]
- Uhlrich, S.D.; Falisse, A.; Kidziński, Ł.; Muccini, J.; Ko, M.; Chaudhari, A.S.; Hicks, J.L.; Delp, S.L. OpenCap: 3D human movement dynamics from smartphone videos. BioRxiv 2022. [Google Scholar] [CrossRef]
- Iosa, M.; Picerno, P.; Paolucci, S.; Morone, G. Wearable inertial sensors for human movement analysis. Expert Rev. Med. Devices 2016, 13, 641–659. [Google Scholar] [CrossRef]
- Tunca, C.; Pehlivan, N.; Ak, N.; Arnrich, B.; Salur, G.; Ersoy, C. Inertial sensor-based robust gait analysis in non-hospital settings for neurological disorders. Sensors 2017, 17, 825. [Google Scholar] [CrossRef]
- Zhou, L.; Tunca, C.; Fischer, E.; Brahms, C.M.; Ersoy, C.; Granacher, U.; Arnrich, B. Validation of an IMU gait analysis algorithm for gait monitoring in daily life situations. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 4229–4232. [Google Scholar]
- Jasiewicz, J.M.; Allum, J.H.; Middleton, J.W.; Barriskill, A.; Condie, P.; Purcell, B.; Li, R.C.T. Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals. Gait Posture 2006, 24, 502–509. [Google Scholar] [CrossRef]
- Ferrari, A.; Ginis, P.; Hardegger, M.; Casamassima, F.; Rocchi, L.; Chiari, L. A mobile Kalman-filter based solution for the real-time estimation of spatio-temporal gait parameters. IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 24, 764–773. [Google Scholar] [CrossRef]
- Mariani, B.; Jiménez, M.C.; Vingerhoets, F.J.; Aminian, K. On-shoe wearable sensors for gait and turning assessment of patients with Parkinson’s disease. IEEE Trans. Biomed. Eng. 2012, 60, 155–158. [Google Scholar] [CrossRef]
- Ding, S.; Ouyang, X.; Liu, T.; Li, Z.; Yang, H. Gait event detection of a lower extremity exoskeleton robot by an intelligent IMU. IEEE Sens. J. 2018, 18, 9728–9735. [Google Scholar] [CrossRef]
- Salarian, A.; Russmann, H.; Vingerhoets, F.J.; Dehollain, C.; Blanc, Y.; Burkhard, P.R.; Aminian, K. Gait assessment in Parkinson’s disease: Toward an ambulatory system for long-term monitoring. IEEE Trans. Biomed. Eng. 2004, 51, 1434–1443. [Google Scholar] [CrossRef]
- Küderle, A.; Roth, N.; Zlatanovic, J.; Zrenner, M.; Eskofier, B.; Kluge, F. The placement of foot-mounted IMU sensors does affect the accuracy of spatial parameters during regular walking. PLoS ONE 2022, 17, e0269567. [Google Scholar] [CrossRef] [PubMed]
- Zago, M.; Tarabini, M.; Delfino Spiga, M.; Ferrario, C.; Bertozzi, F.; Sforza, C.; Galli, M. Machine-learning based determination of gait events from foot-mounted inertial units. Sensors 2021, 21, 839. [Google Scholar] [CrossRef] [PubMed]
- Romijnders, R.; Warmerdam, E.; Hansen, C.; Schmidt, G.; Maetzler, W. A deep learning approach for gait event detection from a single shank-worn imu: Validation in healthy and neurological cohorts. Sensors 2022, 22, 3859. [Google Scholar] [CrossRef] [PubMed]
- Niswander, W.; Kontson, K. Evaluating the impact of imu sensor location and walking task on accuracy of gait event detection algorithms. Sensors 2021, 21, 3989. [Google Scholar] [CrossRef] [PubMed]
- Panebianco, G.P.; Bisi, M.C.; Stagni, R.; Fantozzi, S. Analysis of the performance of 17 algorithms from a systematic review: Influence of sensor position, analysed variable and computational approach in gait timing estimation from IMU measurements. Gait Posture 2018, 66, 76–82. [Google Scholar] [CrossRef] [PubMed]
- Zrenner, M.; Küderle, A.; Roth, N.; Jensen, U.; Dümler, B.; Eskofier, B.M. Does the position of foot-mounted IMU sensors influence the accuracy of spatio-temporal parameters in endurance running? Sensors 2020, 20, 5705. [Google Scholar] [CrossRef]
- Anwary, A.R.; Yu, H.; Vassallo, M. Optimal foot location for placing wearable IMU sensors and automatic feature extraction for gait analysis. IEEE Sens. J. 2018, 18, 2555–2567. [Google Scholar] [CrossRef]
- Peurala, S.H.; Tarkka, I.M.; Pitkänen, K.; Sivenius, J. The effectiveness of body weight-supported gait training and floor walking in patients with chronic stroke. Arch. Phys. Med. Rehabil. 2005, 86, 1557–1564. [Google Scholar] [CrossRef]
- Mao, Y.-R.; Lo, W.L.; Lin, Q.; Li, L.; Xiao, X.; Raghavan, P.; Huang, D.-F. The effect of body weight support treadmill training on gait recovery, proximal lower limb motor pattern, and balance in patients with subacute stroke. BioMed Res. Int. 2015, 2015, 175719. [Google Scholar] [CrossRef]
- Hidler, J.; Brennan, D.; Nichols, D.; Brady, K.; Nef, T. ZeroG: Overground gait and balance training system. J. Rehabil. Res. Dev. 2011, 48, 287–298. [Google Scholar] [CrossRef]
- Jezernik, S.; Colombo, G.; Keller, T.; Frueh, H.; Morari, M. Robotic orthosis lokomat: A rehabilitation and research tool. Neuromodul. Technol. Neural Interface 2003, 6, 108–115. [Google Scholar] [CrossRef]
- Nam, K.Y.; Kim, H.J.; Kwon, B.S.; Park, J.-W.; Lee, H.J.; Yoo, A. Robot-assisted gait training (Lokomat) improves walking function and activity in people with spinal cord injury: A systematic review. J. Neuroeng. Rehabil. 2017, 14, 24. [Google Scholar] [CrossRef]
- Lin, J.; Hu, G.; Ran, J.; Chen, L.; Zhang, X.; Zhang, Y. Effects of bodyweight support and guidance force on muscle activation during Locomat walking in people with stroke: A cross-sectional study. J. Neuroeng. Rehabil. 2020, 17, 5. [Google Scholar] [CrossRef] [PubMed]
- Becker, B.E. Aquatic therapy: Scientific foundations and clinical rehabilitation applications. PmR 2009, 1, 859–872. [Google Scholar] [CrossRef]
- Kato, T.; Onishi, S.; Kitagawa, K. Kinematical analysis of underwater walking and running. Sports Med. Train. Rehabil. 2001, 10, 165–182. [Google Scholar] [CrossRef]
- Tripp, F.; Krakow, K. Effects of an aquatic therapy approach (Halliwick-Therapy) on functional mobility in subacute stroke patients: A randomized controlled trial. Clin. Rehabil. 2014, 28, 432–439. [Google Scholar] [CrossRef] [PubMed]
- Pöyhönen, T.; Sipilä, S.; Keskinen, K.L.; Hautala, A.; Savolainen, J.; Mälkiä, E. Effects of aquatic resistance training on neuromuscular performance in healthy women. Med. Sci. Sports Exerc. 2002, 34, 2103–2109. [Google Scholar]
- Kim, S.B.; O’sullivan, D.M. Effects of aqua aerobic therapy exercise for older adults on muscular strength, agility and balance to prevent falling during gait. J. Phys. Ther. Sci. 2013, 25, 923–927. [Google Scholar] [CrossRef]
- Barreto, M.S.T.; Bela, L.F.D.; Dias, J.M.; Pelegrinelli, A.R.M.; de Campos, R.R.; da Silva Carvalho, R.G.; Taglietti, M.; Batista, J.P., Jr.; Silva, M.F.; Olkoski, M.M. Reliability of ground reaction forces in the aquatic environment. J. Electromyogr. Kinesiol. 2016, 30, 23–30. [Google Scholar] [CrossRef]
- Volpe, D.; Pavan, D.; Morris, M.; Guiotto, A.; Iansek, R.; Fortuna, S.; Frazzitta, G.; Sawacha, Z. Underwater gait analysis in Parkinson’s disease. Gait Posture 2017, 52, 87–94. [Google Scholar] [CrossRef]
- Silvatti, A.P.; Cerveri, P.; Telles, T.; Dias, F.A.; Baroni, G.; Barros, R.M. Quantitative underwater 3D motion analysis using submerged video cameras: Accuracy analysis and trajectory reconstruction. Comput. Methods Biomech. Biomed. Eng. 2013, 16, 1240–1248. [Google Scholar] [CrossRef] [PubMed]
- Monoli, C.; Fuentez-Pérez, J.F.; Cau, N.; Capodaglio, P.; Galli, M.; Tuhtan, J.A. Land and underwater gait analysis using wearable IMU. IEEE Sens. J. 2021, 21, 11192–11202. [Google Scholar] [CrossRef]
- Fantozzi, S.; Giovanardi, A.; Borra, D.; Gatta, G. Gait kinematic analysis in water using wearable inertial magnetic sensors. PLoS ONE 2015, 10, e0138105. [Google Scholar] [CrossRef] [PubMed]
- Daukantas, S.; Marozas, V.; Lukosevicius, A.; Jegelevicius, D.; Kybartas, D. Video and inertial sensors based estimation of kinematical parameters in swimming sport. In Proceedings of the 6th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing Systems, Prague, Czech Republic, 15–17 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 408–411. [Google Scholar]
- MacLean, M.K.; Ferris, D.P. Effects of simulated reduced gravity and walking speed on ankle, knee, and hip quasi-stiffness in overground walking. PLoS ONE 2022, 17, e0271927. [Google Scholar] [CrossRef] [PubMed]
- Harrison, R.; Bulstrode, S. Percentage weight-bearing during partial immersion in the hydrotherapy pool. Physiother. Pract. 1987, 3, 60–63. [Google Scholar] [CrossRef]
- O’Connor, C.M.; Thorpe, S.K.; O’Malley, M.J.; Vaughan, C.L. Automatic detection of gait events using kinematic data. Gait Posture 2007, 25, 469–474. [Google Scholar] [CrossRef]
- Mickelborough, J.; Van Der Linden, M.; Richards, J.; Ennos, A. Validity and reliability of a kinematic protocol for determining foot contact events. Gait Posture 2000, 11, 32–37. [Google Scholar] [CrossRef]
- Catalfamo, P.; Moser, D.; Ghoussayni, S.; Ewins, D. Detection of gait events using an F-Scan in-shoe pressure measurement system. Gait Posture 2008, 28, 420–426. [Google Scholar] [CrossRef]
- Pedregosa, F.; Varoquaux, G.; Gramfort, A.; Michel, V.; Thirion, B.; Grisel, O.; Blondel, M.; Prettenhofer, P.; Weiss, R.; Dubourg, V. Scikit-learn: Machine learning in Python. J. Mach. Learn. Res. 2011, 12, 2825–2830. [Google Scholar]
- Zhu, W.; Zeng, N.; Wang, N. Sensitivity, specificity, accuracy, associated confidence interval and ROC analysis with practical SAS implementations. In NESUG Proceedings; Health Care and Life Sciences: Baltimore, MD, USA, 2010; Volume 19, p. 67. [Google Scholar]
- Bhongade, A.; Gupta, R.; Gandhi, T.K. Machine Learning-Based Gait Characterization Using Single IMU Sensor. In Proceedings of the 2022 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 4–5 November 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 263–266. [Google Scholar]
- Kaneda, K.; Ohgi, Y.; McKean, M.; Burkett, B. Features of acceleration and angular velocity using thigh IMUs during walking in water. Int. J. Aquat. Res. Educ. 2020, 12, 12. [Google Scholar] [CrossRef]
- Fantozzi, S.; Cortesi, M.; Giovanardi, A.; Borra, D.; Di Michele, R.; Gatta, G. Effect of walking speed during gait in water of healthy elderly. Gait Posture 2020, 82, 6–13. [Google Scholar] [CrossRef] [PubMed]
- Chevutschi, A.; Lensel, G.; Vaast, D.; Thevenon, A. An electromyographic study of human gait both in water and on dry ground. J. Physiol. Anthropol. 2007, 26, 467–473. [Google Scholar] [CrossRef] [PubMed]
- Yokoyama, H.; Kato, T.; Kaneko, N.; Kobayashi, H.; Hoshino, M.; Kokubun, T.; Nakazawa, K. Basic locomotor muscle synergies used in land walking are finely tuned during underwater walking. Sci. Rep. 2021, 11, 18480. [Google Scholar] [CrossRef] [PubMed]
| Comparison Pairs | Correlation Coefficient | ||||
|---|---|---|---|---|---|
| 0.4 m/s | 0.8 m/s | 1.2 m/s | 1.6 m/s | Average | |
| No BWS on-land—30% BWS on-land | 0.81 | 0.96 | 0.99 | 0.97 | 0.93 |
| No BWS on-land—50% BWS on-land | 0.69 | 0.85 | 0.96 | 0.93 | 0.86 |
| No BWS on-land—Waist level underwater | 0.68 | 0.78 | 0.67 | 0.66 | 0.70 |
| No BWS on-land—Chest level underwater | 0.50 | 0.71 | 0.69 | 0.66 | 0.64 |
| 30% BWS on-land—Waist level underwater | 0.72 | 0.77 | 0.67 | 0.67 | 0.71 |
| 50% BWS on-land—Chest level underwater | 0.51 | 0.79 | 0.69 | 0.71 | 0.67 |
| 30% BWS on-land—50% BWS on-land | 0.76 | 0.90 | 0.96 | 0.96 | 0.90 |
| Waist level underwater—Chest level underwater | 0.72 | 0.86 | 0.86 | 0.96 | 0.85 |
| Average | 0.67 | 0.83 | 0.81 | 0.81 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, S.; Fernandes, N.J.; Nordin, A.D. Characterizing Bodyweight-Supported Treadmill Walking on Land and Underwater Using Foot-Worn Inertial Measurement Units and Machine Learning for Gait Event Detection. Sensors 2023, 23, 7945. https://doi.org/10.3390/s23187945
Song S, Fernandes NJ, Nordin AD. Characterizing Bodyweight-Supported Treadmill Walking on Land and Underwater Using Foot-Worn Inertial Measurement Units and Machine Learning for Gait Event Detection. Sensors. 2023; 23(18):7945. https://doi.org/10.3390/s23187945
Chicago/Turabian StyleSong, Seongmi, Nathaniel J. Fernandes, and Andrew D. Nordin. 2023. "Characterizing Bodyweight-Supported Treadmill Walking on Land and Underwater Using Foot-Worn Inertial Measurement Units and Machine Learning for Gait Event Detection" Sensors 23, no. 18: 7945. https://doi.org/10.3390/s23187945