
Examination of the Accuracy of Movement Tracking Systems for Monitoring Exercise for Musculoskeletal Rehabilitation

 , ,
, ,  ,
,
Abstract
:1. Introduction
- Analysis of existing systems for tracking human movements and their applicability in musculoskeletal rehabilitation;
- Modeling the process of monitoring and evaluating musculoskeletal rehabilitation exercises using various tracking systems, which can be used in the development of rehabilitation systems of various kinds;
- Development and testing of information-processing algorithms for various systems of movement tracking to obtain objective data on the quality of the exercise performance;
- Implementation of algorithms for the classification of human actions to automatically determine the exercise performed.
1.1. Monitoring of User Movements
1.1.1. Inertial Navigation Systems
1.1.2. Steam VR Lighthouse
1.1.3. Motion Capture Suit
1.1.4. Computer Vision Systems
1.2. Overview of Approaches to the Analysis and Classification of User Movements in the Process of Musculoskeletal Rehabilitation
- Solution Trees: A simple-to-implement and easily interpreted machine learning algorithm that identifies the characteristics by which the classification was completed; the greater depth of the tree, the more branches by different characteristics are performed for classification;
- K-nearest neighbors: The classification is performed on the basis of comparing the current object characteristics with the parameters of the nearest objects and choosing a similar class to them;
- Random forest: an ensemble method of classification combining several assessors (trees of solutions with a given depth of branching) to increase the accuracy;
- Multilayered dense neural networks: simple to implement; universal approximators;
- Recurrent neural networks such as LSTM: common and effective models in time series analysis;
- Multilayered convolutional neural networks: generalize the signs of time sequences and rows, which is justified for most types of data coming from tracking systems;
- Multilayered convolutional neural networks with the addition of layers of multiheaded attention (Transformer architecture): an efficient and modern type of neuronal network that includes, in addition to convolutional neural networks, layers of multiheaded attention, allowing one to identify specific features in incoming datasets.
1.3. Analysis of Approaches to Assessing User Tracking Quality
1.4. Purpose of the Research
- Simulate the processes of monitoring and evaluating musculoskeletal rehabilitation exercises, which include the formalization of procedures for determining positions, amplitudes, and speeds of body parts of the user, as well as determining the current exercise and its performance quality.
- Develop the necessary information processing algorithms from various movement tracking systems to obtain the final result in the form of a set of target points needed to evaluate the exercises.
- Implement an algorithm for monitoring musculoskeletal rehabilitation exercises to analyze and classify user movements.
- Implement various user tracking systems, taking into account the characteristics of the subject area and the limitations arising in the process of musculoskeletal rehabilitation.
- Compare intelligent information processing algorithms, including machine learning methods, to automate the process of classifying musculoskeletal rehabilitation exercises with the chosen movement tracking method.
2. Materials and Methods
2.1. Modeling the Process of Monitoring and Assessing Musculoskeletal Rehabilitation Exercises
2.2. Data Processing Algorithms from Various Movement Tracking Systems for Exercise Monitoring
2.2.1. Processing Data from Inertial Navigation Systems
2.2.2. Processing Data from Virtual Reality Systems
2.2.3. Processing Data from Motion Capture Suit
2.2.4. Processing Data in Computer Vision Systems
- There is no reference point;
- All points of the human body model have their own coordinates;
- The coordinates of body model points are given in relative values (from 0 to 1), in accordance with the position on the frame received from the camera.
2.3. Application of Machine Learning Algorithms for Analysis and Classification of Musculoskeletal Rehabilitation Exercises
- DecisionTreeClassifier: decision trees for multiclass classification; the input of the algorithm must be an array of the format (the number of examples, the number of features), which requires transformation:
- KNeighborsClassifier: k-nearest neighbor classifier; the input data format is identical to decision trees and requires transformation (37);
- RandomForestClassifier: a meta estimator that trains a set of decision trees; input data format needs to be converted (37);
- NN: multilayer neural networks including dense layers;
- LSTM: multilayer recurrent neural networks, including layers of long-term memory;
- CNN: convolutional neural networks using 1D convolutional layers (Conv1D) to identify and generalize features in a time sequence;
- CNN + Transformer: a combined neural network that first identifies the main features of the data using convolutional layers, then uses the MultiHeadAttention layers to extract from the set all the most important features for the current class. As a basis for the architecture of this network, it is proposed to use MobileViT [51], which requires a transformation of the input data to the following form:
3. Results
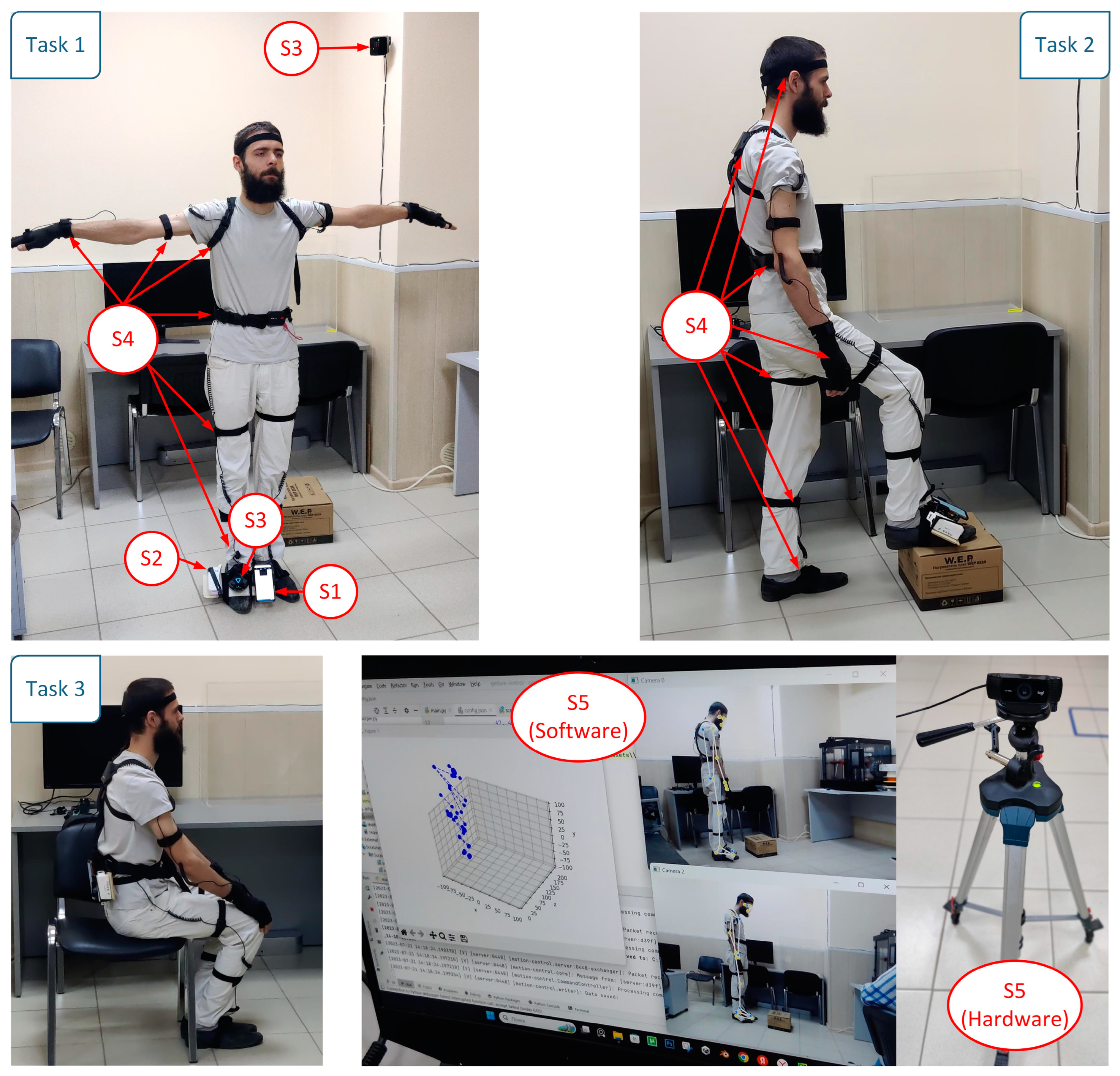
3.1. Experimental Research Design
3.2. Comparison of Motion Tracking Systems in Musculoskeletal Rehabilitation Exercises
3.3. Assessment of the Classification Accuracy of Musculoskeletal Rehabilitation Exercises

{kind=link}
{kind=link}
{kind=link}
| Model | Description |
|---|---|
| DecisionTreeClassifier (DT) | Standard decision tree regressor with max_depth = 10 |
| KNeighborsClassifier (KNN) | Standard classifier based on k-nearest neighbors |
| RandomForestClassifier (RF) | Standard random forest with n_estimators = 20, max_depth = 10 |
| Simple neural network (NN) | Multilayer neural network with 4 hidden Dense layers of 200 neurons with ReLU activation function, 1 Dropout layer (20% dropout rate) |
| Long short-term memory neural network (LSTM) | Multilayer neural network with two LSTM layers (20 and 50 neurons), 2 hidden Dense layers of 100 neurons, 1 Dropout layer (20% dropout rate) |
| Multiple neural network (CNN) | Multilayer Neural Network with 4 Blocks from the Conv1D Convolutional Layer (number of filters from 32 to 256, convolutional kernel = 3) combined with BatchNormalization, followed by GlobalAvgPool1D and 1 Dense layer of 100 neurons |
| CNN + Transformer (Transformer) | A model based on the MobileViT architecture shown in Figure 2 |

4. Discussion
- The use of a motion capture suit for people with diseases of the musculoskeletal system is impossible, as it requires attaching too many sensors and equipment to them;
- Systems S1 and S2 require fixing the corresponding devices on the human body, which is not possible or convenient for all points, especially in the case of S2. In addition, these systems, even within the framework of the experiments performed, are extremely inconvenient when collecting more than one target point (since this requires a synchronization system for launching and processing data);
- During the operation of the S3 system, there are similar disadvantages, to which is added the need to install base stations indoors, in the area where the VR helmet should also be located; this greatly limits the use of these systems in both outpatient and inpatient environments;
- The S5 system does not contact the user directly, which does not impose any restrictions on him/her; cameras can be fixed at an arbitrary distance and track all points of the human body at the same time; the disadvantages include possible system failures if other people appear in the visibility zone, but this aspect can be eliminated by additional software that takes into account the appearance of the current user.
5. Conclusions
- -
- A comparative analysis of human movement tracking systems adapted for musculoskeletal rehabilitation, which revealed that systems based on computer vision are most preferable in this area;
- -
- Modeling the process of monitoring and evaluating specific exercises for an adapted tracking system, taking into account restrictions on low mobility of users (use in outpatient and inpatient environment, lack of sensors directly on the human body);
- -
- Development and testing of data processing algorithms for selected human tracking systems, which allows for each of them to determine the qualitative aspects of musculoskeletal rehabilitation exercises, and monitor and evaluate them;
- -
- Implementation of exercise classification algorithms with the ability to automatically determine exercises based on developed and trained machine learning models, which can also be used to identify human movement patterns and recognize types of activity for the subsequent implementation of automatic systems for monitoring and tracking human activities.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Collado-Mateo, D.; Lavib-Perez, A.M.; Penacoba, C.; Del Coso, J.; Leyton-Roman, M.; Luque-Casado, A.; Gasque, P.; Fernandez-del-Olmo, M.A.; Amado-Alonso, D. Key factors associated with adherence to physical exercise in patients with chronic diseases and older adults: An umbrella review. Int. J. Environ. Res. Public Health 2021, 18, 2023. [Google Scholar] [CrossRef] [PubMed]
- Razuvaeva, T.; Gut, Y.; Lokteva, A.; Pchelkina, E. The problem of psychological rehabilitation of persons with disorders of the musculoskeletal system acquired in adulthood. Behav. Sci. 2019, 9, 133. [Google Scholar] [CrossRef] [PubMed]
- Gatchel, R.J.; Dougall, A.L. Psychosocial and Psychiatric Sequelae of Chronic Musculoskeletal Pain and Disability Disorders. In Handbook of Musculoskeletal Pain and Disability Disorders in the Workplace; Springer Science & Business Media: New York, NY, USA, 2014; pp. 219–233. [Google Scholar]
- Negrini, S.; Antonini, G.; Carabalona, R.; Minozzi, S. Physical exercises as a treatment for adolescent idiopathic scoliosis. A systematic review. Pediatr. Rehabil. 2003, 6, 227–235. [Google Scholar] [CrossRef] [PubMed]
- Marzolini, S.; Oh, P.; McIlroy, W.; Brooks, D. The effects of an aerobic and resistance exercise training program on cognition following stroke. Neurorehabilit. Neural Repair 2013, 27, 392–402. [Google Scholar] [CrossRef] [PubMed]
- Ye, G.; Grabke, E.P.; Pakosh, M.; Furlan, J.C.; Masani, K. Clinical benefits and system design of FES-rowing exercise for rehabilitation of individuals with spinal cord injury: A systematic review. Arch. Phys. Med. Rehabil. 2021, 102, 1595–1605. [Google Scholar] [CrossRef] [PubMed]
- Gamble, A.R.; Pappas, E.; O’Keeffe, M.; Ferreira, G.; Maher, C.G.; Zadro, J.R. Intensive supervised rehabilitation versus less supervised rehabilitation following anterior cruciate ligament reconstruction? A systematic review and me-ta-analysis. J. Sci. Med. Sport 2021, 24, 862–870. [Google Scholar] [CrossRef]
- Hohmann, E.; Tetsworth, K.; Bryant, A. Physiotherapy-guided versus home-based, unsupervised rehabilitation in isolated anterior cruciate injuries following surgical reconstruction. Knee Surg. Sports Traumatol. Arthrosc. 2011, 19, 1158–1167. [Google Scholar] [CrossRef]
- Longo, U.G.; Berton, A.; Risi Ambrogioni, L.; Lo Presti, D.; Carnevale, A.; Candela, V.; Denaro, V. Cost-effectiveness of supervised versus unsupervised rehabilitation for rotator-cuff repair: Systematic review and meta-analysis. Int. J. Environ. Res. Public Health 2020, 17, 2852. [Google Scholar] [CrossRef]
- Coulter, C.; Perriman, D.M.; Neeman, T.M.; Smith, P.N.; Scarvell, J.M. Supervised or unsupervised rehabilitation after total hip replacement provides similar improvements for patients: A randomized controlled trial. Arch. Phys. Med. Rehabil. 2017, 98, 2253–2264. [Google Scholar] [CrossRef] [PubMed]
- Rhim, H.C.; Lee, J.H.; Lee, S.J.; Jeon, J.S.; Kim, G.; Lee, K.Y.; Jang, K.M. Supervised rehabilitation may lead to better outcome than home-based rehabilitation up to 1 year after anterior cruciate ligament reconstruction. Medicina 2020, 57, 19. [Google Scholar] [CrossRef]
- Ryrsø, C.K.; Godtfredsen, N.S.; Kofod, L.M.; Lavesen, M.; Mogensen, L.; Tobberup, R.; Iepsen, U.W. Lower mortality after early supervised pulmonary rehabilitation following COPD-exacerbations: A systematic review and meta-analysis. BMC Pulm. Med. 2018, 18, 154. [Google Scholar] [CrossRef]
- Nalini, M.; Moradi, B.; Esmaeilzadeh, M.; Maleki, M. Does the effect of supervised cardiac rehabilitation programs on body fat distribution remained long time? J. Cardiovasc. Thorac. Res. 2013, 5, 133. [Google Scholar] [PubMed]
- Lacroix, A.; Hortobagyi, T.; Beurskens, R.; Granacher, U. Effects of supervised vs. unsupervised training programs on balance and muscle strength in older adults: A systematic review and meta-analysis. Sports Med. 2017, 47, 2341–2361. [Google Scholar] [CrossRef] [PubMed]
- Brouns, B.; Meesters, J.J.; Wentink, M.M.; de Kloet, A.J.; Arwert, H.J.; Vliet Vlieland, T.P.M.; van Bodegom-Vos, L. Why the uptake of eRehabilitation programs in stroke care is so difficult—A focus group study in the Netherlands. Implement. Sci. 2018, 13, 133. [Google Scholar] [CrossRef] [PubMed]
- Qiu, S.; Liu, L.; Wang, Z.; Li, S.; Zhao, H.; Wang, J.; Tang, K. Body sensor network-based gait quality assessment for clinical decision-support via multi-sensor fusion. IEEE Access 2019, 7, 59884–59894. [Google Scholar] [CrossRef]
- Yen, C.T.; Liao, J.X.; Huang, Y.K. Human daily activity recognition performed using wearable inertial sensors combined with deep learning algorithms. IEEE Access 2020, 8, 174105–174114. [Google Scholar] [CrossRef]
- Tahir, S.B.U.D.; Jalal, A.; Kim, K. Wearable inertial sensors for daily activity analysis based on adam optimization and the maximum entropy Markov model. Entropy 2020, 22, 579. [Google Scholar] [CrossRef]
- Šlajpah, S.; Čebašek, E.; Munih, M.; Mihelj, M. Time-Based and Path-Based Analysis of Upper-Limb Movements during Activities of Daily Living. Sensors 2023, 23, 1289. [Google Scholar] [CrossRef] [PubMed]
- Yang, Y.; Weng, D.; Li, D.; Xun, H. An improved method of pose estimation for lighthouse base station extension. Sensors 2017, 17, 2411. [Google Scholar] [CrossRef] [PubMed]
- Maskeliūnas, R.; Damaševičius, R.; Blažauskas, T.; Canbulut, C.; Adomavičienė, A.; Griškevičius, J. BiomacVR: A virtual reality-based system for precise human posture and motion analysis in rehabilitation exercises using depth sensors. Electronics 2023, 12, 339. [Google Scholar] [CrossRef]
- Wu, Y.; Tao, K.; Chen, Q.; Tian, Y.; Sun, L. A Comprehensive Analysis of the Validity and Reliability of the Perception Neuron Studio for Upper-Body Motion Capture. Sensors 2022, 22, 6954. [Google Scholar] [CrossRef]
- Choo, C.Z.Y.; Chow, J.Y.; Komar, J. Validation of the Perception Neuron system for full-body motion capture. PLoS ONE 2022, 17, e0262730. [Google Scholar] [CrossRef]
- Lugaresi, C.; Tang, J.; Nash, H.; McClanahan, C.; Uboweja, E.; Hays, M.; Grundmann, M. Mediapipe: A Framework for Building Perception Pipelines. arXiv 2019, arXiv:1906.08172. Available online: https://arxiv.org/pdf/1906.08172 (accessed on 18 July 2023).
- Movenet: Ultra Fast and Accurate Pose Detection Model. Available online: https://www.tensorflow.org/hub/tutorials/movenet (accessed on 18 July 2023).
- Viswakumar, A.; Rajagopalan, V.; Ray, T.; Parimi, C. Human gait analysis using OpenPose. In Proceedings of the 2019 Fifth International Conference on Image Information Processing (ICIIP 2019), Shimla, India, 15–17 November 2019; pp. 310–314. [Google Scholar]
- D’Antonio, E.; Taborri, J.; Mileti, I.; Rossi, S.; Patané, F. Validation of a 3D markerless system for gait analysis based on OpenPose and two RGB webcams. IEEE Sens. J. 2021, 21, 17064–17075. [Google Scholar] [CrossRef]
- Dai, Y.; Wu, J.; Fan, Y.; Wang, J.; Niu, J.; Gu, F.; Shen, S. MSEva: A musculoskeletal rehabilitation evaluation system based on EMG signals. ACM Trans. Sens. Netw. 2022, 19, 1–23. [Google Scholar] [CrossRef]
- Tack, C. Artificial intelligence and machine learning|applications in musculoskeletal physiotherapy. Musculoskelet. Sci. Pract. 2019, 39, 164–169. [Google Scholar] [CrossRef] [PubMed]
- Bavan, L.; Surmacz, K.; Beard, D.; Mellon, S.; Rees, J. Adherence monitoring of rehabilitation exercise with inertial sensors: A clinical validation study. Gait Posture 2019, 70, 211–217. [Google Scholar] [CrossRef] [PubMed]
- Zhu, M.; Zhang, Z.; Hirdes, J.P.; Stolee, P. Using machine learning algorithms to guide rehabilitation planning for home care clients. BMC Med. Inform. Decis. Mak. 2007, 7, 41. [Google Scholar] [CrossRef]
- Vakanski, A.; Ferguson, J.M.; Lee, S. Mathematical modeling and evaluation of human motions in physical therapy using mixture density neural networks. J. Physiother. Phys. Rehabil. 2016, 1, 4. [Google Scholar]
- Islam, M.M.; Nooruddin, S.; Karray, F.; Muhammad, G. Human activity recognition using tools of convolutional neural net-works: A state of the art review, data sets, challenges, and future prospects. Comput. Biol. Med. 2022, 149, 106060. [Google Scholar] [CrossRef]
- Mangal, N.K.; Tiwari, A.K. A review of the evolution of scientific literature on technology-assisted approaches using RGB-D sensors for musculoskeletal health monitoring. Comput. Biol. Med. 2021, 132, 104316. [Google Scholar] [CrossRef] [PubMed]
- Kendall, A.; Grimes, M.; Cipolla, R. Posenet: A convolutional network for real-time 6-dof camera relocalization. In Proceedings of the IEEE International Conference on Computer Vision (ICCV 2015), Washington, DC, USA, 7–13 December 2015; pp. 2938–2946. [Google Scholar]
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime multi-person 2d pose estimation using part affinity fields. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2017), Honolulu, HI, USA, 21–26 July 2017; pp. 7291–7299. [Google Scholar]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q.; Van Der Maaten, K.Q. Weinberger, Densely Connected Convolutional Networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 4700–4708. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR 2018), Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Tan, M.; Le, Q. Efficientnet, Rethinking Model Scaling for Convolutional Neural Net-works. In Proceedings of the International Conference on Machine Learning (ICML 2019), Long Beach, CA, USA, 10–15 June 2019; pp. 6105–6114. [Google Scholar]
- Dirgová Luptáková, I.; Kubovčík, M.; Pospíchal, J. Wearable sensor-based human activity recognition with transformer model. Sensors 2022, 22, 1911. [Google Scholar] [CrossRef] [PubMed]
- Vaughan, N.; Gabrys, B. Comparing and combining time series trajectories using dynamic time warping. Procedia Comput. Sci. 2016, 96, 465–474. [Google Scholar] [CrossRef]
- Obukhov, A.; Dedov, D.; Volkov, A.; Teselkin, D. Modeling of Nonlinear Dynamic Processes of Human Movement in Virtual Reality Based on Digital Shadows. Computation 2023, 11, 85. [Google Scholar] [CrossRef]
- Fasel, B.; Favre, J.; Chardonnens, J.; Gremion, G.; Aminian, K. An inertial sensor-based system for spatio-temporal analysis in classic cross-country skiing diagonal technique. J. Biomech. 2015, 48, 3199–3205. [Google Scholar] [CrossRef] [PubMed]
- Alfian, R.I.; Ma’arif, A.; Sunardi, S. Noise reduction in the accelerometer and gyroscope sensor with the Kalman filter algorithm. J. Robot. Control (JRC) 2021, 2, 180–189. [Google Scholar] [CrossRef]
- Labbe, R. Kalman and bayesian filters in python. Chap 2014, 7, 4. [Google Scholar]
- Yan, W.; Zhang, Q.; Wang, L.; Mao, Y.; Wang, A.; Zhao, C. A modified kalman filter for integrating the different rate data of gyros and accelerometers retrieved from android smartphones in the GNSS/IMU coupled navigation. Sensors 2020, 20, 5208. [Google Scholar] [CrossRef]
- Alatise, M.B.; Hancke, G.P. Pose estimation of a mobile robot based on fusion of IMU data and vision data using an extended Kalman filter. Sensors 2017, 17, 2164. [Google Scholar] [CrossRef]
- Pagnon, D.; Domalain, M.; Reveret, L. Pose2Sim: An end-to-end workflow for 3D markerless sports kinematics—Part 1: Robustness. Sensors 2021, 21, 6530. [Google Scholar] [CrossRef]
- Chen, M.; Duan, Z.; Lan, Z.; Yi, S. Scene reconstruction algorithm for unstructured weak-texture regions based on stereo vision. Appl. Sci. 2023, 13, 6407. [Google Scholar] [CrossRef]
- Obukhov, A.D.; Krasnyanskiy, M.N. Neural network method for automatic data generation in adaptive information systems. Neural Comput. Appl. 2021, 33, 15457–15479. [Google Scholar] [CrossRef]
- Mehta, S.; Rastegari, M. Mobilevit: Light-weight, general-purpose, and mobile-friendly vision transformer. arXiv 2021, arXiv:2110.02178. Available online: https://arxiv.org/pdf/2110.02178 (accessed on 16 July 2023).
- Liu, J.; Pu, J.; Sun, L.; He, Z. An approach to robust INS/UWB integrated positioning for autonomous indoor mobile robots. Sensors 2019, 19, 950. [Google Scholar] [CrossRef] [PubMed]
- Filippeschi, A.; Schmitz, N.; Miezal, M.; Bleser, G.; Ruffaldi, E.; Stricker, D. Survey of motion tracking methods based on inertial sensors: A focus on upper limb human motion. Sensors 2017, 17, 1257. [Google Scholar] [CrossRef] [PubMed]
- Tian, Q.; Salcic, Z.; Wang, K.I.K.; Pan, Y. A hybrid indoor localization and navigation system with map matching for pedestrians using smartphones. Sensors 2015, 15, 30759–30783. [Google Scholar] [CrossRef] [PubMed]
- Tsilomitrou, O.; Gkountas, K.; Evangeliou, N.; Dermatas, E. Wireless motion capture system for upper limb rehabilitation. Appl. Syst. Innov. 2021, 4, 14. [Google Scholar] [CrossRef]
- Zeng, Q.; Zheng, G.; Liu, Q. PE-DLS: A novel method for performing real-time full-body motion reconstruction in VR based on Vive trackers. Virtual Real. 2022, 26, 1391–1407. [Google Scholar] [CrossRef]
- Delamare, M.; Duval, F.; Boutteau, R. A new dataset of people flow in an industrial site with uwb and motion capture systems. Sensors 2020, 20, 4511. [Google Scholar] [CrossRef]
- Rapczyński, M.; Werner, P.; Handrich, S.; Al-Hamadi, A. A baseline for cross-database 3d human pose estimation. Sensors 2021, 21, 3769. [Google Scholar] [CrossRef] [PubMed]
- Morar, A.; Moldoveanu, A.; Mocanu, I.; Moldoveanu, F.; Radoi, I.E.; Asavei, V.; Butean, A. A comprehensive survey of indoor localization methods based on computer vision. Sensors 2020, 20, 2641. [Google Scholar] [CrossRef] [PubMed]

| Exercise | S1 | S2 | S3 | S4 | S5 |
|---|---|---|---|---|---|
| Task 1 | 49 | 46 | 80 | 73 | 71 |
| Task 2 | 60 | 68 | 79 | 70 | 76 |
| Task 3 (TP) | 49 | 42 | 79 | 73 | 80 |
| Task 3 (BP) | 61 | 48 | 78 | 73 | 80 |
| Percentage of correct data | 68% | 64% | 99% | 90% | 96% |
| Exercise | Metrics | S1 | S2 | S3 | S4 | S5 | -Value |
|---|---|---|---|---|---|---|---|
| Task 1 | 0.16 ± 0.26 | 0.24 ± 0.45 | 0.41 ± 0.07 | 0.3 ± 0.06 | 0.06 ± 0.07 | 0.0 | |
| 0.26 ± 0.47 | 0.38 ± 0.6 | 0.71 ± 0.06 | 0.41 ± 0.07 | 0.61 ± 0.29 | 0.0 | ||
| 0.11 ± 0.17 | 0.31 ± 0.7 | 0.23 ± 0.04 | 0.05 ± 0.05 | 0.09 ± 0.1 | 0.0 | ||
| 0.27 ± 0.27 | 0.34 ± 0.47 | 0.44 ± 0.07 | 0.31 ± 0.06 | 0.48 ± 0.22 | 0.0 | ||
| 0.61 ± 0.48 | 0.48 ± 0.65 | 0.72 ± 0.06 | 0.42 ± 0.06 | 0.63 ± 0.26 | 0.0 | ||
| 0.3 ± 0.25 | 0.4 ± 0.69 | 0.24 ± 0.04 | 0.09 ± 0.06 | 0.26 ± 0.09 | 0.0 | ||
| 0.15 ± 0.09 | 0.17 ± 0.2 | 0.23 ± 0.05 | 0.16 ± 0.06 | 0.63 ± 0.36 | 0.0 | ||
| MSE | 0.84 ± 0.37 | 0.96 ± 0.37 | 0.11 ± 0.05 | 0.31 ± 0.13 | 0.58 ± 0.17 | 0.0 | |
| 0.89 ± 0.23 | 0.96 ± 0.2 | 0.32 ± 0.07 | 0.55 ± 0.09 | 0.75 ± 0.11 | 0.0 | ||
| MSE (path) | 0.53 ± 0.26 | 0.89 ± 0.38 | 0.1 ± 0.04 | 0.3 ± 0.12 | 0.2 ± 0.26 | 0.0 | |
| (path) | 0.71 ± 0.19 | 0.92 ± 0.2 | 0.3 ± 0.07 | 0.54 ± 0.09 | 0.36 ± 0.26 | 0.0 | |
| Task 2 | 0.19 ± 0.37 | 0.14 ± 0.2 | 0.02 ± 0.02 | 0.25 ± 0.1 | 0.21 ± 0.15 | 0.0 | |
| 0.08 ± 0.23 | 0.26 ± 0.29 | 0.3 ± 0.07 | 0.15 ± 0.06 | 0.15 ± 0.09 | 0.0 | ||
| 0.09 ± 0.18 | 0.26 ± 0.17 | 0.01 ± 0.02 | 0.07 ± 0.04 | 0.28 ± 0.22 | 0.0 | ||
| 0.24 ± 0.37 | 0.31 ± 0.38 | 0.36 ± 0.06 | 0.28 ± 0.1 | 0.4 ± 0.24 | 0.0 | ||
| 0.31 ± 0.41 | 0.48 ± 0.42 | 0.3 ± 0.07 | 0.15 ± 0.06 | 0.21 ± 0.13 | 0.0 | ||
| 0.19 ± 0.24 | 0.36 ± 0.19 | 0.2 ± 0.05 | 0.11 ± 0.05 | 0.33 ± 0.2 | 0.0 | ||
| 0.06 ± 0.03 | 0.23 ± 0.1 | 0.18 ± 0.04 | 0.16 ± 0.06 | 0.43 ± 0.29 | 0.0 | ||
| MSE | 0.24 ± 0.42 | 0.17 ± 0.42 | 0.12 ± 0.02 | 0.03 ± 0.04 | 0.06 ± 0.07 | 0.0 | |
| 0.42 ± 0.25 | 0.34 ± 0.23 | 0.34 ± 0.03 | 0.16 ± 0.09 | 0.21 ± 0.14 | 0.0 | ||
| MSE (path) | 0.32 ± 0.78 | 0.37 ± 1.27 | 0.01 ± 0.02 | 0.03 ± 0.04 | 0.08 ± 0.21 | 0.0 | |
| (path) | 0.41 ± 0.39 | 0.36 ± 0.49 | 0.08 ± 0.07 | 0.14 ± 0.09 | 0.2 ± 0.2 | 0.0 | |
| Task 3 (TP) | 0.14 ± 0.17 | 0.05 ± 0.07 | 0.02 ± 0.02 | 0.17 ± 0.05 | 0.38 ± 0.28 | 0.0 | |
| 0.5 ± 0.64 | 0.17 ± 0.19 | 0.41 ± 0.02 | 0.06 ± 0.01 | 0.33 ± 0.22 | 0.0 | ||
| 0.5 ± 0.61 | 0.25 ± 0.31 | 0.01 ± 0.02 | 0.02 ± 0.02 | 0.46 ± 0.28 | 0.0 | ||
| 0.23 ± 0.22 | 0.23 ± 0.46 | 0.44 ± 0.12 | 0.18 ± 0.06 | 0.45 ± 0.25 | 0.0 | ||
| 0.76 ± 0.56 | 0.39 ± 0.39 | 0.45 ± 0.04 | 0.13 ± 0.07 | 0.47 ± 0.22 | 0.0 | ||
| 0.68 ± 0.63 | 0.4 ± 0.31 | 0.29 ± 0.09 | 0.05 ± 0.02 | 0.52 ± 0.28 | 0.0 | ||
| 0.2 ± 0.12 | 0.23 ± 0.17 | 0.27 ± 0.07 | 0.13 ± 0.05 | 0.67 ± 0.51 | 0.0 | ||
| MSE | 0.61 ± 0.93 | 0.33 ± 0.1 | 0.23 ± 0.02 | 0.26 ± 0.06 | 0.16 ± 0.19 | 0.0 | |
| 0.69 ± 0.36 | 0.57 ± 0.1 | 0.48 ± 0.03 | 0.51 ± 0.06 | 0.32 ± 0.23 | 0.0 | ||
| MSE (path) | 0.57 ± 1.05 | 0.46 ± 0.97 | 0.03 ± 0.02 | 0.21 ± 0.08 | 0.13 ± 0.16 | 0.0 | |
| (path) | 0.63 ± 0.42 | 0.57 ± 0.38 | 0.15 ± 0.07 | 0.45 ± 0.1 | 0.3 ± 0.2 | 0.0 | |
| Task 3 (BP) | 0.17 ± 0.22 | 0.1 ± 0.11 | 0.01 ± 0.02 | 0.09 ± 0.02 | 0.21 ± 0.15 | 0.0 | |
| 0.37 ± 0.37 | 0.16 ± 0.37 | 0.42 ± 0.03 | 0.07 ± 0.01 | 0.19 ± 0.13 | 0.0 | ||
| 0.13 ± 0.22 | 0.15 ± 0.12 | 0.01 ± 0.01 | 0.01 ± 0.02 | 0.29 ± 0.2 | 0.0 | ||
| 0.3 ± 0.32 | 0.16 ± 0.17 | 0.36 ± 0.07 | 0.12 ± 0.03 | 0.29 ± 0.15 | 0.0 | ||
| 0.61 ± 0.5 | 0.24 ± 0.37 | 0.43 ± 0.02 | 0.07 ± 0.01 | 0.25 ± 0.12 | 0.0 | ||
| 0.49 ± 0.48 | 0.33 ± 0.56 | 0.24 ± 0.04 | 0.04 ± 0.02 | 0.34 ± 0.19 | 0.0 | ||
| 0.16 ± 0.11 | 0.14 ± 0.13 | 0.2 ± 0.03 | 0.07 ± 0.02 | 0.35 ± 0.22 | 0.0 | ||
| MSE | 0.32 ± 0.3 | 0.4 ± 0.45 | 0.24 ± 0.02 | 0.31 ± 0.06 | 0.19 ± 0.18 | 0.0 | |
| 0.52 ± 0.22 | 0.59 ± 0.23 | 0.49 ± 0.02 | 0.55 ± 0.05 | 0.39 ± 0.21 | 0.0 | ||
| MSE (path) | 0.46 ± 0.97 | 0.33 ± 0.46 | 0.03 ± 0.02 | 0.29 ± 0.05 | 0.12 ± 0.15 | 0.0 | |
| (path) | 0.56 ± 0.39 | 0.52 ± 0.24 | 0.15 ± 0.07 | 0.53 ± 0.05 | 0.29 ± 0.19 | 0.0 | |
| Mean | MSE | 0.481 ± 0.59 | 0.434 ± 0.48 | 0.175 ± 0.07 | 0.23 ± 0.14 | 0.241 ± 0.25 | |
| 0.614 ± 0.32 | 0.584 ± 0.3 | 0.409 ± 0.09 | 0.445 ± 0.18 | 0.411 ± 0.27 | |||
| MSE (path) | 0.463 ± 0.84 | 0.498 ± 0.93 | 0.041 ± 0.04 | 0.208 ± 0.13 | 0.131 ± 0.2 | ||
| (path) | 0.566 ± 0.38 | 0.568 ± 0.42 | 0.173 ± 0.11 | 0.418 ± 0.18 | 0.286 ± 0.22 |
| Model | Q | |||||
|---|---|---|---|---|---|---|
| 10 | 25 | 50 | 100 | 150 | 200 | |
| DT | 61.84 | 62.42 | 66.25 | 71.32 | 77.6 | 74.36 |
| KNN | 77.34 | 77.51 | 78.84 | 81.73 | 82.4 | 76.92 |
| RF | 66.2 | 69.75 | 72.93 | 82.23 | 84.8 | 76.92 |
| NN | 58.31 | 59.72 | 63.54 | 69.04 | 76.0 | 71.79 |
| LSTM | 57.76 | 55.54 | 54.14 | 54.06 | 60.8 | 64.1 |
| CNN | 46.94 | 49.16 | 48.16 | 53.05 | 51.2 | 56.41 |
| Transformer | 50.86 | 54.84 | 60.06 | 54.06 | 24.8 | 35.9 |
| Dataset size | (49,597, 10, 3) | (14,249, 30, 3) | (7184, 50, 3) | (1966, 100, 3) | (624, 150, 3) | (195, 200, 3) |
| Model | Data Source | |||||
|---|---|---|---|---|---|---|
| S1 | S2 | S3 | S4 | S5 | S3–S5 Systems | |
| DT | 58.97 | 50.82 | 84.55 | 88.89 | 100.0 | 81.29 |
| KNN | 69.23 | 63.93 | 92.73 | 94.44 | 100.0 | 92.52 |
| RF | 61.54 | 70.49 | 94.09 | 92.59 | 100.0 | 91.84 |
| NN | 76.92 | 59.02 | 94.09 | 94.44 | 95.24 | 96.26 |
| LSTM | 64.1 | 52.46 | 81.82 | 66.67 | 100.0 | 86.73 |
| CNN | 43.59 | 47.54 | 71.82 | 85.19 | 66.67 | 65.99 |
| Transformer | 46.15 | 29.51 | 92.27 | 90.74 | 100.0 | 92.18 |
| Model | F1-Measure by Classes | Accuracy | ||
|---|---|---|---|---|
| Task 1 | Task 2 | Task 3 | ||
| DT | 88.89 | 90.91 | 100.0 | 94.12 |
| KNN | 100.0 | 100.0 | 100.0 | 100.0 |
| RF | 100.0 | 100.0 | 100.0 | 100.0 |
| NN | 100.0 | 100.0 | 100.0 | 100.0 |
| LSTM | 45.45 | 0.0 | 0.0 | 29.41 |
| CNN | 90.91 | 75.0 | 93.33 | 88.24 |
| Transformer | 100.0 | 100.0 | 100.0 | 100.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Obukhov, A.; Volkov, A.; Pchelintsev, A.; Nazarova, A.; Teselkin, D.; Surkova, E.; Fedorchuk, I. Examination of the Accuracy of Movement Tracking Systems for Monitoring Exercise for Musculoskeletal Rehabilitation. Sensors 2023, 23, 8058. https://doi.org/10.3390/s23198058
Obukhov A, Volkov A, Pchelintsev A, Nazarova A, Teselkin D, Surkova E, Fedorchuk I. Examination of the Accuracy of Movement Tracking Systems for Monitoring Exercise for Musculoskeletal Rehabilitation. Sensors. 2023; 23(19):8058. https://doi.org/10.3390/s23198058
Chicago/Turabian StyleObukhov, Artem, Andrey Volkov, Alexander Pchelintsev, Alexandra Nazarova, Daniil Teselkin, Ekaterina Surkova, and Ivan Fedorchuk. 2023. "Examination of the Accuracy of Movement Tracking Systems for Monitoring Exercise for Musculoskeletal Rehabilitation" Sensors 23, no. 19: 8058. https://doi.org/10.3390/s23198058
APA StyleObukhov, A., Volkov, A., Pchelintsev, A., Nazarova, A., Teselkin, D., Surkova, E., & Fedorchuk, I. (2023). Examination of the Accuracy of Movement Tracking Systems for Monitoring Exercise for Musculoskeletal Rehabilitation. Sensors, 23(19), 8058. https://doi.org/10.3390/s23198058