
Car Bumper Effects in ADAS Sensors at Automotive Radar Frequencies




Abstract
:1. Introduction
2. Automotive Radar and Autonomous Vehicle
- Measurement ranges up to 50 m, 100 m or 250 m (depending on the application, as stated in the introduction);
- Bandwidths up to 1 or 4 GHz (for high-resolution applications);
- Maximum effective isotropic radiated power between 33 and 55 dBm;
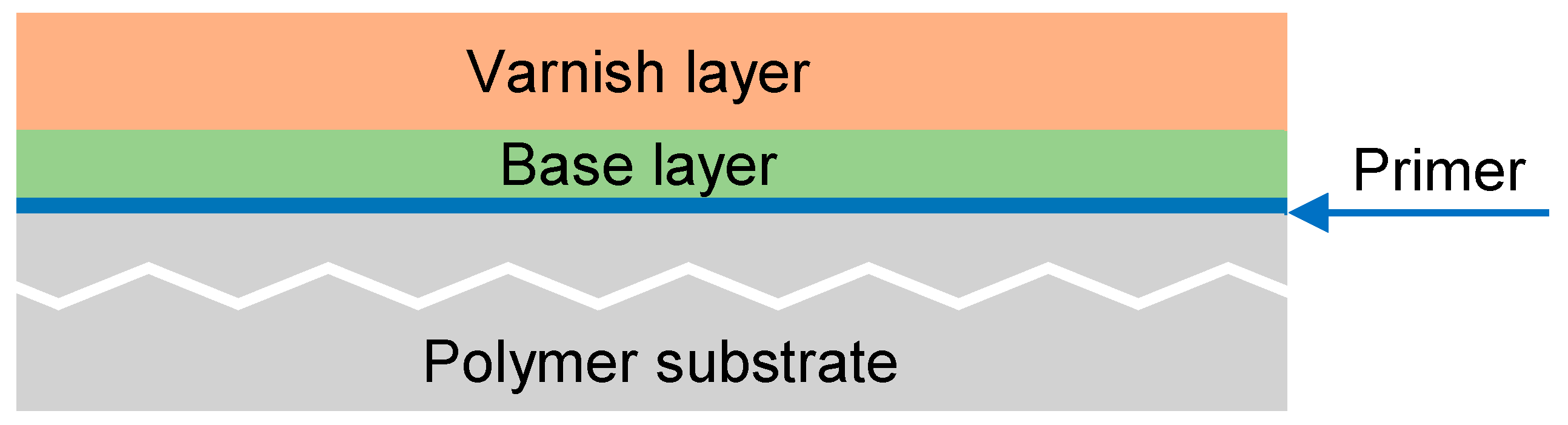
3. Car Bumpers Characteristics
4. Experimental Setup and Procedure
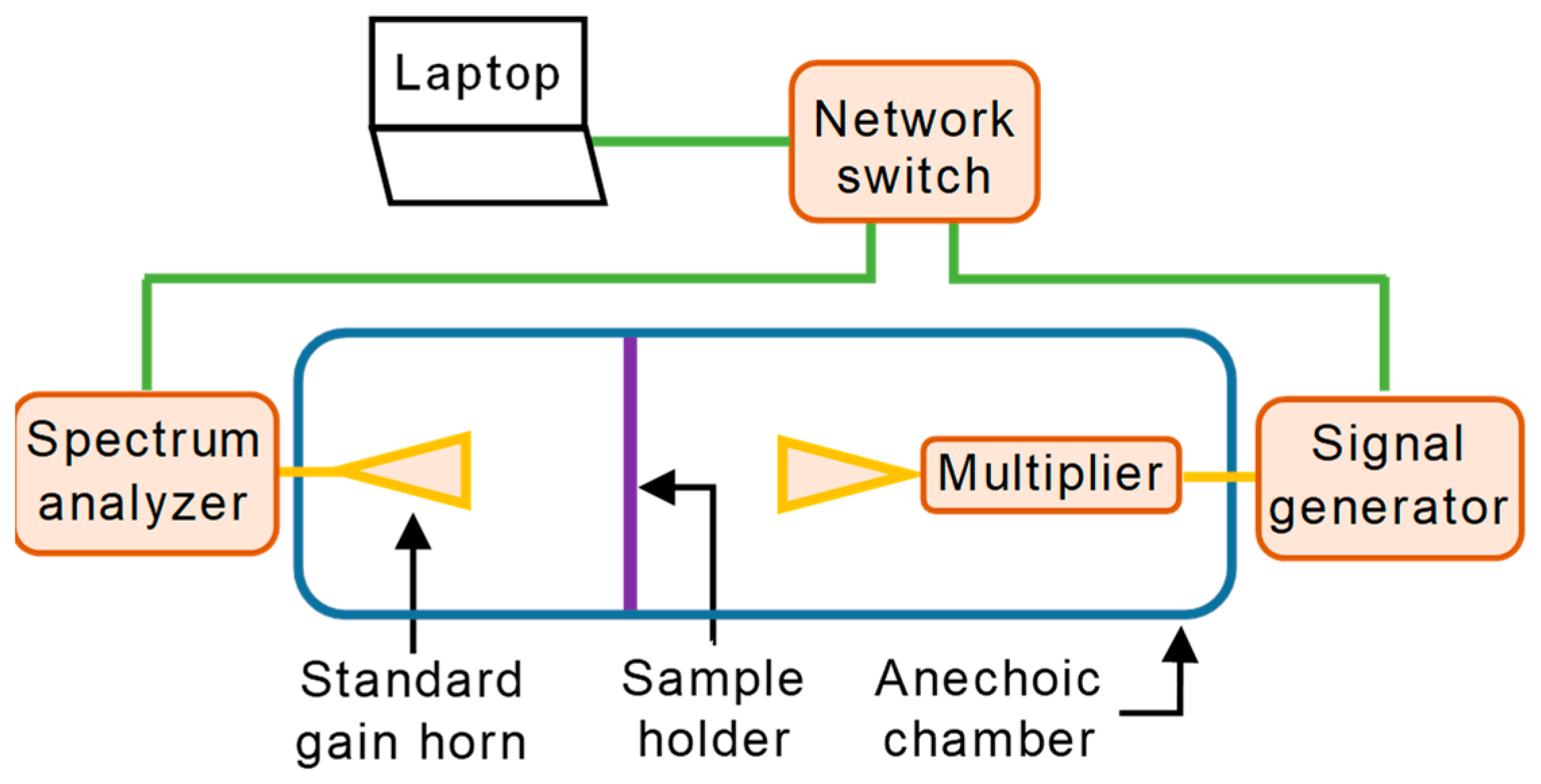
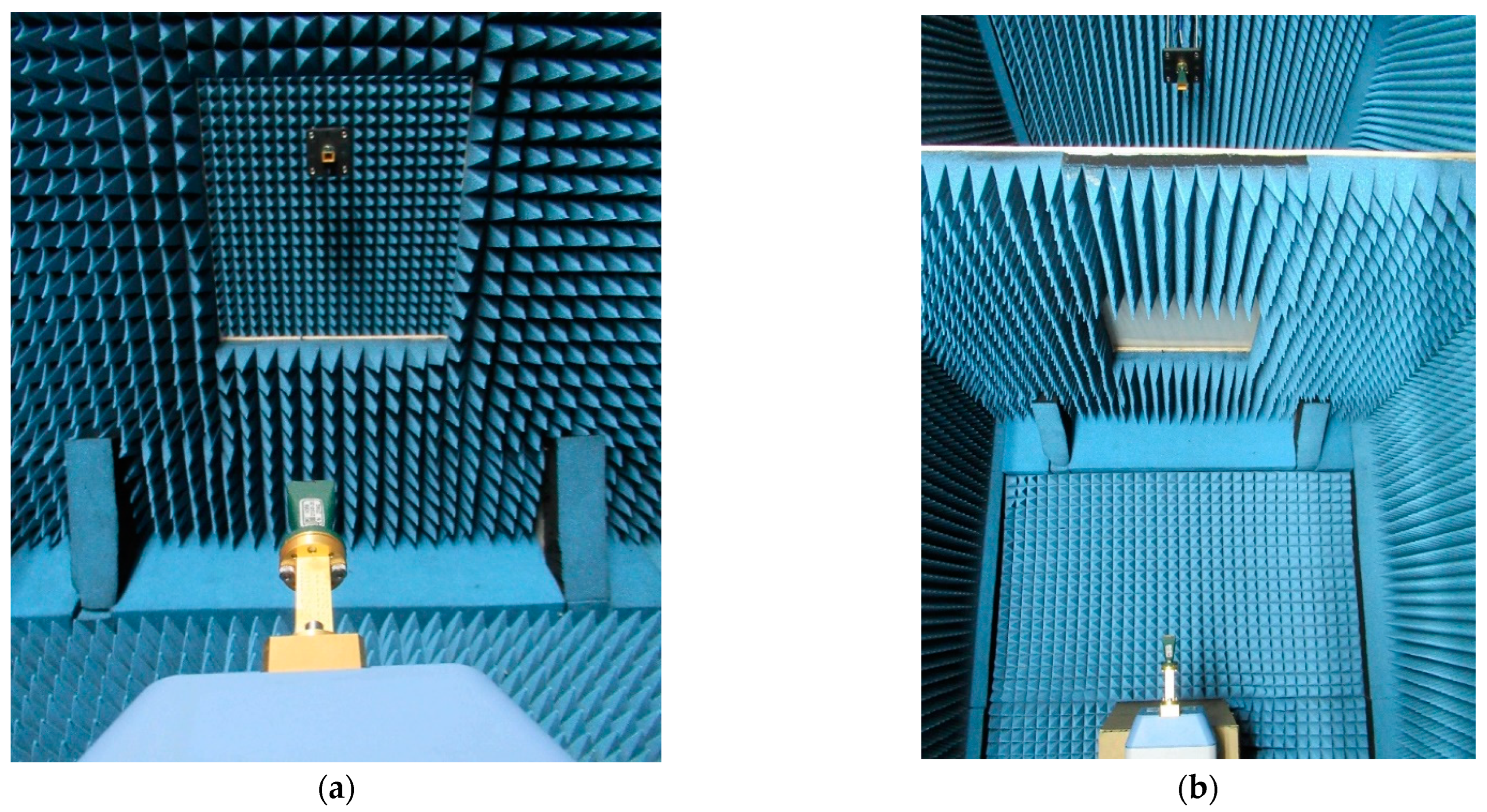
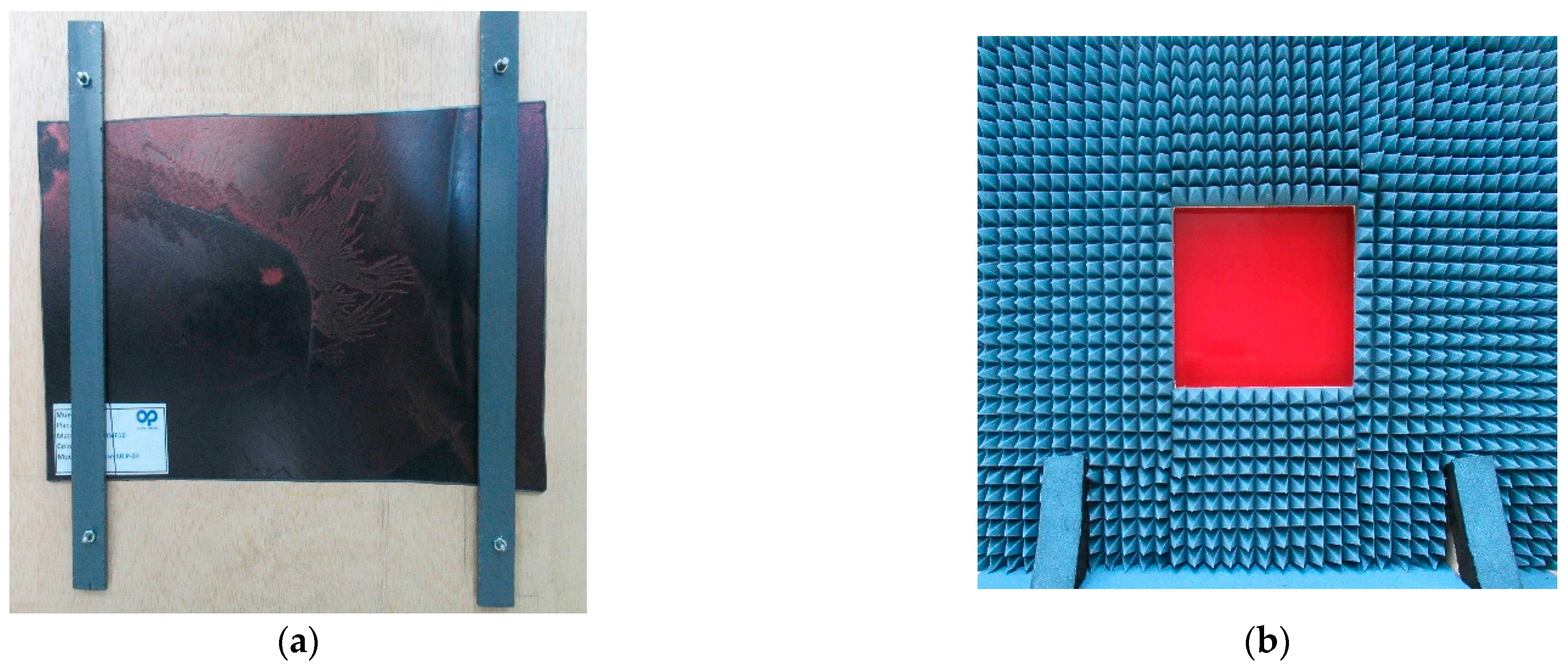
4.1. Measurement Setup
4.2. Measurement Procedure
5. Results and Discussion
- is the received power;
- is the transmitted power;
- G is the gain of the antenna (transmitting and receiving antenna is the same);
- λ is the wavelength;
- σ is the radar cross-section of the target;
- R is the distance between the radar and the target.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Marzbani, H.; Khayyam, H.; To, C.N.; Quoc, Đ.V.; Jazar, R.N. Autonomous Vehicles: Autodriver Algorithm and Vehicle Dynamics. IEEE Trans. Veh. Technol. 2019, 68, 3201–3211. [Google Scholar] [CrossRef]
- Dai, Y.; Lee, S. Perception, Planning and Control for Self-Driving System Based on On-board Sensors. Adv. Mech. Eng. 2020, 12, 1687814020956494. [Google Scholar] [CrossRef]
- Magosi, Z.F.; Li, H.; Rosenberger, P.; Wan, L.; Eichberger, A. A Survey on Modelling of Automotive Radar Sensors for Virtual Test and Validation of Automated Driving. Sensors 2022, 22, 5693. [Google Scholar] [CrossRef] [PubMed]
- Sohail, M.; Khan, A.U.; Sandhu, M.; Shoukat, I.A.; Jafri, M.; Shin, H. Radar sensor based machine learning approach for precise vehicle position estimation. Sci. Rep. 2023, 13, 13837. [Google Scholar] [CrossRef] [PubMed]
- Maaloul, S.; Aniss, H.; Mendiboure, L.; Berbineau, M. Performance Analysis of Existing ITS Technologies: Evaluation and Coexistence. Sensors 2022, 22, 9570. [Google Scholar] [CrossRef]
- Ma, D.; Shlezinger, N.; Huang, T.; Liu, Y.; Eldar, Y.C. Joint Radar-Communication Strategies for Autonomous Vehicles: Combining Two Key Automotive Technologies; IEEE Signal Processing Magazine: Piscataway, NJ, USA, 2020; Volume 37, pp. 85–97. [Google Scholar] [CrossRef]
- ITU-R Recommendation M.2057-1; Systems Characteristics of Automotive Radars Operating in the Frequency Band 76–81 GHz for Intelligent Transport Systems Applications. International Telecommunications Union: Geneva, Switzerland, 2018.
- ETSI EN 301 091, V2.1.1; Electromagnetic Compatibility and Radio Spectrum Matters (ERM); Short Range Devices; Transport and Traffic Telematics (TTT); Short Range Radar Equipment Operating in the 77 GHz to 81 GHz Band; Harmonised Standard Covering the Essential Requirements of Article 3.2 of Directive 2014/53/EU. European Telecommunications Standards Institute: Sophia-Antipolis, France, 2016.
- ETSI EN 302 571; Intelligent Transport Systems (ITS); Radiocommunications Equipment Operating in the 5855 MHz to 5925 MHz Frequency Band; Harmonised Standard Covering the Essential Requirements of Article 3.2 of Directive 2014/53/EU. European Telecommunications Standards Institute: Sophia-Antipolis, France, 2017.
- ETSI TS 138 101-2, V17.5.0; 5G.; NR.; User Equipment (UE) Radio Transmission and Reception; Part 2: Range 2 Standalone. European Telecommunications Standards Institute: Sophia-Antipolis, France, 2022.
- Anritsu Corporation; Fraunhofer FHR. E-Band Based Car Radar Emblem Measurements. Application Note 11410-01152, Rev. A. 2019. Available online: https://dl.cdn-anritsu.com/en-us/test-measurement/files/Application-Notes/Application-Note/11410-01152A.pdf (accessed on 18 September 2023).
- Miscia, M. Analysis on the Installation of Long-Range Radar Sensors in Modern Vehicles. Master’s Thesis, Mechatronic Engineering, Politecnico di Torino, Turin, Italy, 2022. [Google Scholar]
- Heuel, S.; Koeppel, T.; Ahmed, S. Evaluating 77 to 79 GHz Automotive Radar Radome Emblems. Microw. J. 2018, 61, 70–78. [Google Scholar]
- Matsuzawa, S.I.; Watanabe, T. Influence of resin cover on antenna gain for automotive millimeter wave radar. In Proceedings of the International Symposium on Antennas and Propagation (ISAP), Okinawa, Japan, 24–28 October 2016; pp. 704–705. [Google Scholar]
- Abd El-Hameed, A.S.; Ouf, E.G.; Elboushi, A.; Seliem, A.G.; Izumi, Y. An Improved Performance Radar Sensor for K-Band Automotive Radars. Sensors 2023, 23, 7070. [Google Scholar] [CrossRef] [PubMed]
- Waldschmidt, C.; Hasch, J.; Menzel, W. Automotive Radar—From First Efforts to Future Systems. IEEE J. Microw. 2021, 1, 135–148. [Google Scholar] [CrossRef]
- Meinel, H.H. Evolving automotive radar—From the very beginnings into the future. In Proceedings of the 8th European Conference on Antennas and Propagation (EuCAP), The Hague, The Netherlands, 6–11 April 2014; pp. 3107–3114. [Google Scholar] [CrossRef]
- Norouzian, F.; Hoare, E.G.; Marchetti, E.; Cherniakov, M.; Gashinova, M. Next Generation, Low-THz Automotive Radar—The Potential for Frequencies above 100 GHz. In Proceedings of the 20th International Radar Symposium (IRS), Ulm, Germany, 26–28 July 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Walden, M. Automotive Radar—From Early Developments to Self-Driving Cars. In Proceedings of the ARMMS RF and Microwave Society Conference, Thame, UK, 20–21 April 2015. [Google Scholar]
- Hung, C.-M.; Lin, A.T.; Peng, B.; Wang, H.; Hsu, J.-L.; Lu, Y.-J.; Hsu, W.; Zhan, J.-H.C.; Juan, B.; Lok, C.-H.; et al. 9.1 Toward Automotive Surround-View Radars. In Proceedings of the International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 17–21 February 2019; pp. 162–164. [Google Scholar] [CrossRef]
- Takeda, Y.; Fujibayashi, T.; Yeh, Y.-S.; Wang, W.; Floyd, B. A 76- to 81-GHz transceiver chipset for long-range and short-range automotive radar. In Proceedings of the IEEE MTT-S International Microwave Symposium (IMS), Tampa, FL, USA, 1–6 June 2014; pp. 1–3. [Google Scholar] [CrossRef]
- ITU-R Recommendation M.1452-2; Millimetre Wave Vehicular Collision Avoidance Radars and Radiocommunication Systems for Intelligent Transport System Applications. International Telecommunications Union: Geneva, Switzerland, 2012.
- Robert Bosch GmbH. Front Radar Sensor. 2023. Available online: https://www.bosch-mobility-solutions.com/en/solutions/sensors/front-radar-sensor/ (accessed on 11 August 2023).
- Robert Bosch GmbH. Corner Radar Sensor. 2023. Available online: https://www.bosch-mobility-solutions.com/en/solutions/sensors/corner-radar-sensor/ (accessed on 11 August 2023).
- Aptiv PLC. Gen 7 Radar Family. 2023. Available online: https://www.aptiv.com/en/gen7-radar-family (accessed on 11 August 2023).
- Valeo, S.A. Valeo.ai. 2023. Available online: https://www.valeo.com/en/valeo-ai/ (accessed on 11 August 2023).
- Continental AG. Radars. 2023. Available online: https://www.continental-automotive.com/en-gl/Passenger-Cars/Autonomous-Mobility/Enablers/Radars (accessed on 11 August 2023).
- ZF Friedrichshafen AG. Imaging Radar. 2023. Available online: https://www.zf.com/products/en/cars/products_64255.html (accessed on 11 August 2023).
- Mano, E.B.; Martins, A.F.; Mendes, L.C. Thermal Analysis Applied to Discarded Car Bumpers. J. Thermal Anal. Calorim. 2000, 59, 425–432. [Google Scholar] [CrossRef]
- Caddy, B. Forensic Examination of Glass and Paint, 1st ed.; CRC Press: London, UK, 2001. [Google Scholar]
- Zieba-Palus, J. Examination of the variation of chemical composition and structure of paint within a car body by FT-IR and Raman spectroscopies. J. Mol. Struct. 2020, 1219, 128558. [Google Scholar] [CrossRef]
- Expósito, I.; García Sánchez, M.; Cuiñas, I. Uncertainty Assessment of a Small Rectangular Anechoic Chamber: From Design to Operation. IEEE Trans. Antennas Propag. 2020, 68, 4871–4880. [Google Scholar] [CrossRef]
- Expósito, I.; García Sánchez, M.; Cuiñas, I. Computing the Influence of Environmental Conditions in Electromagnetic Measurements Uncertainty. IEEE Trans. Antennas Propag. 2019, 67, 4084–4090. [Google Scholar] [CrossRef]
- García Sánchez, M.; Iglesias, C.; Cuiñas, I.; Expósito, I. Building Penetration Losses at 3.5 GHz: Dependence on Polarization and Incidence Angle. Electronics 2022, 12, 106. [Google Scholar] [CrossRef]
- Zhekov, S.S.; Nazneen, Z.; Franek, O.; Pedersen, G.F. Measurement of Attenuation by Building Structures in Cellular Network Bands. IEEE Antennas Wireless Propag. Lett. 2018, 17, 2260–2263. [Google Scholar] [CrossRef]
- Ferreira, D.; Caldeirinha, R.F.S.; Fernandes, T.R.; Cuiñas, I. Hollow Clay Brick Wall Propagation Analysis and Modified Brick Design for Enhanced Wi-Fi Coverage. IEEE Trans. Antennas Propag. 2018, 66, 331–339. [Google Scholar] [CrossRef]
- Kowal, M.; Kubal, S.; Zielinski, R.J. Measuring the shielding effectiveness of large textile materials in an anechoic chamber. In Proceedings of the International Symposium on Electromagnetic Compatibility—EMC Europe, Rome, Italy, 17–21 September 2012; pp. 1–4. [Google Scholar] [CrossRef]
- Winter, C.; Korff, M.; Fabbri, T.; Holzknecht, S.; Weber, I.; Biebl, E.M. Permittivity Determination Method for Multilayer Automotive Coatings for Radar Applications at 77 GHz. IEEE Trans. Microw. Theory Technol. 2022, 70, 2380–2388. [Google Scholar] [CrossRef]
- Balanis, C.A. Modern Antenna Handbook; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2008; pp. 40–43. [Google Scholar]
- Dash, J.C.; Sarkar, D.; Antar, Y. Effect of Painted Bumper on Automotive MIMO RADAR Performance Study Using Bi-directional Loss and Antenna Array Ambiguity Function. In Proceedings of the IEEE International Symposium on Antennas and Propagation and USNC-URSI Radio Science Meeting (AP-S/URSI), Denver, CO, USA, 10–12 July 2022; pp. 479–480. [Google Scholar] [CrossRef]
- Xiao, Y.; Norouzian, F.; Hoare, E.G.; Marchetti, E.; Gashinova, M.; Cherniakov, M. Modeling and Experiment Verification of Transmissivity of Low-THz Radar Signal Through Vehicle Infrastructure. IEEE Sensors J. 2020, 20, 8483–8496. [Google Scholar] [CrossRef]
- Emilsson, E.P. Radar Transparency and Paint Compatibility: A Study of Automobile Bumper and Bumper-Skin Complex Permittivities for 77GHz Microwaves. Master’s Thesis, Department of Materials and Manufacturing Technology. Chalmers University, Gothenburg, Sweden, 2017. [Google Scholar]
- ISO 13528:2022; Statistical Methods for Use in Proficiency Testing by Interlaboratory Comparison. International Standard Organization: Geneva, Switzerland, 2022.
- Patel, S.M.; Patel, K.; Negi, P.S.; Ojha, V.N. Shielding effectiveness measurements and uncertainty estimation for textiles by a VNA-based free space transmission method. Int. J. Metrol. Qual. Eng. 2013, 4, 109–115. [Google Scholar] [CrossRef]
- Pavlík, M.; Gladyr, A.; Zbojovský, J. Comparison of Measured and Simulated Data of Shielding Effectiveness, Reflection and Absorption of Electromagnetic Field. In Proceedings of the IEEE Problems of Automated Electrodrive, Theory and Practice (PAEP), Kremenchuk, Ukraine, 21–25 September 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Zbojovský, J.; Pavlík, M.; Čonka, Z.; Kruželák, L.; Kosterec, M. Influence of shielding paint on the combination of building materials for evaluation of shielding effectiveness. In Proceedings of the 19th International Scientific Conference on Electric Power Engineering (EPE), Brno, Czech Republic, 6–18 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- EN 50413:2019; Basic Standard on Measurement and Calculation Procedures for Human Exposure to Electric, Magnetic and Electromagnetic Fields (0 Hz–300 GHz). European Committee for Electrotechnical Standardization: Brussels, Belgium, 2019.
- Saporetti, M.A.; Foged, L.J.; Svensson, B.; Alexandridis, A.; Expósito Pérez, I.; Álvarez López, Y.; Tercero, F.; Culotta López, C.; Sierra Castañer, M. Recent Developments in International Facility Comparison Campaigns. In Proceedings of the 41st Annual Meeting and Symposium of the Antenna Measurement Techniques Association, San Diego, CA, USA, 6–11 October 2019; pp. 270–275. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type of Radar | Azimuth 3dB-BW | Elevation 3dB-BW | ||
|---|---|---|---|---|
| Tx | Rx | Tx | Rx | |
| Radar A. Automotive radar. Front applications (250 m). | 5° | 5° | 3° | 3° |
| Radar B. Automotive high-resolution radar. Front applications (100 m). | 12.5° | 13.5° | 5.5° | 5.5° |
| Radar C. Automotive high-resolution radar. Corner applications (100 m). | 12.5° | 16° | 5.5° | 5.5° |
| Radar D. Automotive high-resolution radar. (100 m). | 16° | 16° | 5.5° | 5.5° |
| Radar E. Automotive high-resolution radar. Very short range applications (50 m). | 27° | 27° | 5.5° | 5.5° |
| Sample | Plastic Type | Type of Paint | Color | Primer Thickness (μm) | Base Thickness (μm) | Varnish Thickness (μm) | Sample Size W (cm) × L (cm) |
|---|---|---|---|---|---|---|---|
| A | PP and PE copolymer | No paint | FXT | -- | -- | -- | 21.9 × 29.8 |
| B | PP and PE copolymer | Three layer | N9 blanc nacre | 2–3 | 27–29 | 35–37 | 21.9 × 30.4 |
| C | PP and PE copolymer | Double layer | 9V noir pearl black | 2–3 | 12–14 | 31–33 | 23.3 × 30.5 |
| D | PP and PE copolymer | Double layer | VH rouge elixir | 2–3 | 19–21 | 39–41 | 21.6 × 29.9 |
| E | PP and PE copolymer + talc | Double layer | F4 artense grey | 2–3 | 12–14 | 41–43 | 21 × 31 |
| Frequency (GHz) | Mean Error (dB) | Median of the Error (dB) | Variance of the Error (dB) |
|---|---|---|---|
| 76 | 0.07 | 0.06 | 0.003 |
| 77 | 0.06 | 0.06 | 0.001 |
| 78 | 0.08 | 0.08 | 0.004 |
| 79 | 0.03 | 0.03 | 0.001 |
| 80 | 0.05 | 0.04 | 0.002 |
| 81 | 0.07 | 0.06 | 0.003 |
| Reference | Automotive Radar Frequency Range | Sample Type | Antennas Polarization | Measurement Scenario | Measurement Uncertainty |
|---|---|---|---|---|---|
| [38] | 76–81 GHz | Painted polycarbonate samples | Not specified | Material Characterization Kit Optical free-space measurement | Not specified |
| [41] 2020 | 76–81 GHz | Samples with three kinds of paints (shape and origin not specified) | Horizontal | Free space method Lab environment Absorber in one wall | Error bars in graphs representing the standard deviations |
| [42] 2017 | 76–81 GHz | Actual bumper samples | Not specified | Free space method Lab environment No absorbers | Not specified |
| Our study | 76–81 GHz | Curved and flat actual bumper samples | Vertical | Free-space method Anechoic chamber Absorbers around the sample | Yes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Expósito, I.; Chin, I.; García Sánchez, M.; Cuiñas, I.; Verhaevert, J. Car Bumper Effects in ADAS Sensors at Automotive Radar Frequencies. Sensors 2023, 23, 8113. https://doi.org/10.3390/s23198113
Expósito I, Chin I, García Sánchez M, Cuiñas I, Verhaevert J. Car Bumper Effects in ADAS Sensors at Automotive Radar Frequencies. Sensors. 2023; 23(19):8113. https://doi.org/10.3390/s23198113
Chicago/Turabian StyleExpósito, Isabel, Ingo Chin, Manuel García Sánchez, Iñigo Cuiñas, and Jo Verhaevert. 2023. "Car Bumper Effects in ADAS Sensors at Automotive Radar Frequencies" Sensors 23, no. 19: 8113. https://doi.org/10.3390/s23198113
APA StyleExpósito, I., Chin, I., García Sánchez, M., Cuiñas, I., & Verhaevert, J. (2023). Car Bumper Effects in ADAS Sensors at Automotive Radar Frequencies. Sensors, 23(19), 8113. https://doi.org/10.3390/s23198113