
Person Re-Identification Using Local Relation-Aware Graph Convolutional Network


Abstract
:1. Introduction
- (1)
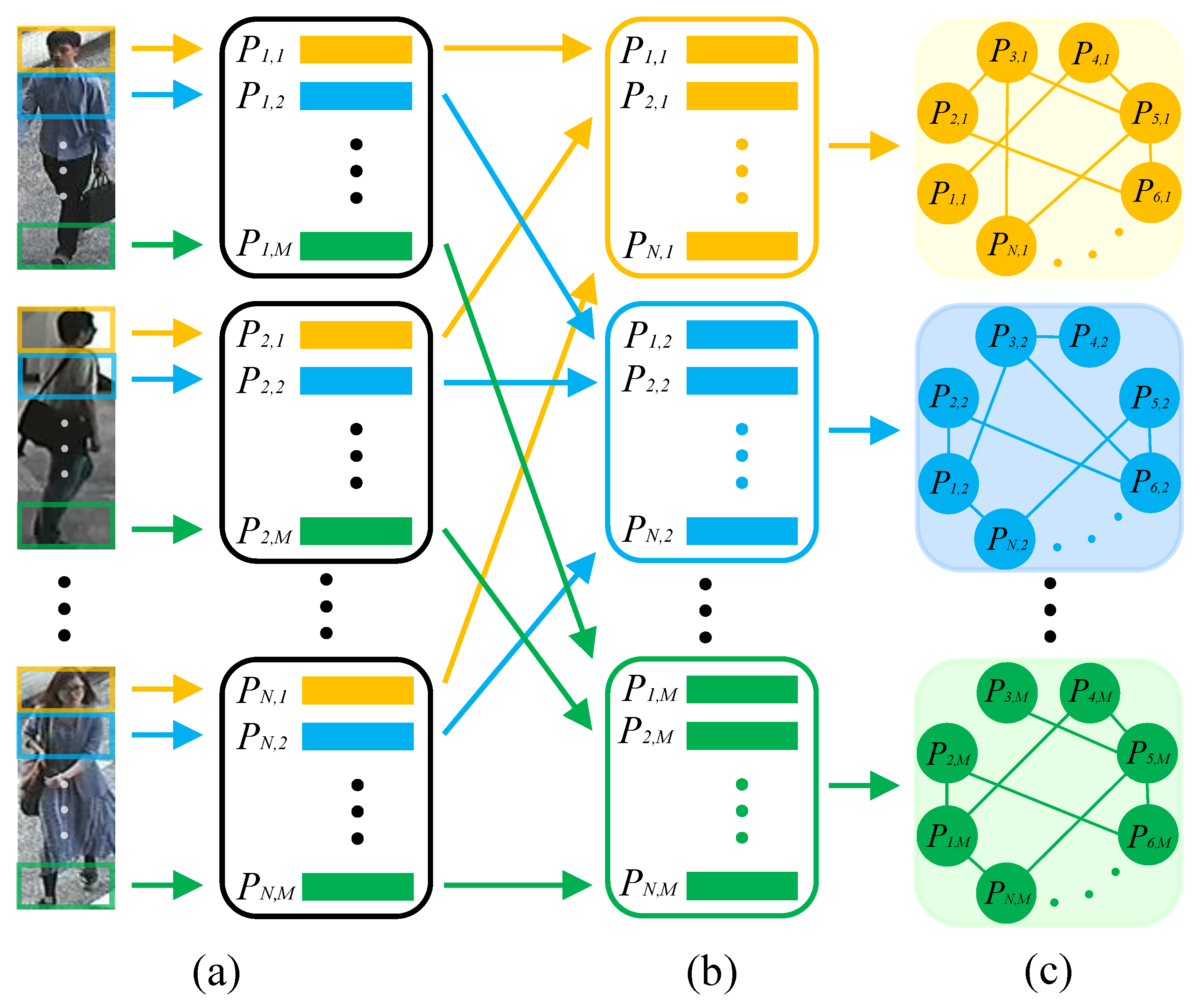
- We propose LRGCN, a person re-ID method, that considers the relationship between local features across different pedestrian images so as to learn valuable information from other pedestrian images.
- (2)
- We design an overlap graph and similarity graph to model the relationship of local features among different pedestrian images from different aspects. Based on the two kinds of graphs, we could obtain robust and discriminative local features.
- (3)
- We propose SGConv, which learns different parameter matrices for the node itself and its neighbor nodes to improve the expressive power of GCN.
2. Related Work
2.1. Person Re-ID
2.2. Graph Convolutional Network
3. Approach
3.1. Extraction of Local Features
3.2. Learning Relationship among Local Features
4. Experiments
4.1. Databases
4.2. Implementation Details
4.3. Ablation Experiments
4.4. Comparison with State-of-the-Art Approaches
4.5. Parameter Analysis
4.6. Time Analysis
4.7. Visualization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lin, R.; Wang, R.; Zhang, W.; Wu, A.; Bi, Y. Joint Modal Alignment and Feature Enhancement for Visible-Infrared Person Re-Identification. Sensors 2023, 23, 4988. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Y.; Liu, P.; Cui, Y.; Liu, C.; Duan, W. Integration of Multi-Head Self-Attention and Convolution for Person re-identification. Sensors 2022, 22, 6293. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Dong, Q.; Zhang, Z.; Liu, S.; Durrani, T.S. Cross-Modality Person Re-Identification via Local Paired Graph attention network. Sensors 2023, 23, 4011. [Google Scholar] [CrossRef] [PubMed]
- Yu, H.X.; Zheng, W.S. Weakly Supervised Discriminative Feature Learning with State Information for Person Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 5528–5538. [Google Scholar]
- Song, W.; Li, S.; Chang, T.; Hao, A.; Zhao, Q.; Qin, H. Context-Interactive CNN for Person Re-Identification. IEEE Trans. Image Process. 2020, 29, 2860–2874. [Google Scholar] [CrossRef] [PubMed]
- Varior, R.R.; Haloi, M.; Wang, G. Gated Siamese Convolutional Neural Network Architecture for Human Re-identification. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 10–16 October 2016; pp. 791–808. [Google Scholar]
- Shen, Y.; Li, H.; Xiao, T.; Yi, S.; Chen, D.; Wang, X. Deep Group-Shuffling Random Walk for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 2265–2274. [Google Scholar]
- Shen, Y.; Xiao, T.; Yi, S.; Chen, D.; Wang, X.; Li, H. Person Re-Identification with Deep Kronecker-Product Matching and Group-Shuffling Random Walk. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 1649–1665. [Google Scholar] [CrossRef]
- Wu, Z.; Huang, Y.; Wang, L.; Wang, X.; Tan, T. A Comprehensive Study on Cross-View Gait Based Human Identification with Deep CNNs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 209–226. [Google Scholar] [CrossRef]
- Khan, M.H.; Farid, M.S.; Grzegorzek, M. A Non-Linear View Transformations Model for Cross-View Gait Recognition. Neurocomputing 2020, 402, 100–111. [Google Scholar] [CrossRef]
- Xiao, T.; Li, H.; Ouyang, W.; Wang, X. Learning Deep Feature Representations with Domain Guided Dropout for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 1249–1258. [Google Scholar]
- Ahmed, E.; Jones, M.; Marks, T.K. An Improved Deep Learning Architecture for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3908–3916. [Google Scholar]
- Chen, W.; Chen, X.; Zhang, J.; Huang, K. A Multi-Task Deep Network for Person Re-Identification. In Proceedings of the AAAI Conference on Artificial Intelligence, San Francisco, CA, USA, 4–9 February 2017; pp. 3988–3994. [Google Scholar]
- Liu, J.; Ni, B.; Yan, Y.; Zhou, P.; Cheng, S.; Hu, J. Pose Transferrable Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 4099–4108. [Google Scholar]
- Wang, H.; Kläser, A.; Schmid, C.; Liu, C.L. Dense Trajectories and Motion Boundary Descriptors for Action Recognition. Int. J. Comput. Vis. 2013, 103, 60–79. [Google Scholar] [CrossRef]
- Zheng, L.; Huang, Y.; Lu, H.; Yang, Y. Pose-Invariant Embedding for Deep Person Re-Identification. IEEE Trans. Image Process. 2019, 28, 4500–4509. [Google Scholar] [CrossRef]
- Yao, H.; Zhang, S.; Hong, R.; Zhang, Y.; Xu, C.; Tian, Q. Deep Representation Learning with Part Loss for Person Re-Identification. IEEE Trans. Image Process. 2019, 28, 2860–2871. [Google Scholar] [CrossRef]
- Sun, Y.; Zheng, L.; Yang, Y.; Tian, Q.; Wang, S. Beyond Part Models: Person Retrieval with Refined Part Pooling (and A Strong Convolutional Baseline). In Proceedings of the European Conference on Computer Vision (ECCV), Stockholm, Sweden, 8–14 September 2018; pp. 480–496. [Google Scholar]
- Kalayeh, M.M.; Basaran, E.; Gökmen, M.; Kamasak, M.E.; Shah, M. Human Semantic Parsing for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 1062–1071. [Google Scholar]
- Miao, J.; Wu, Y.; Liu, P.; Ding, Y.; Yang, Y. Pose-Guided Feature Alignment for Occluded Person Re-Identification. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 542–551. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-Supervised Classification with Graph Convolutional Networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Zhou, J.; Cui, G.; Hu, S.; Zhang, Z.; Yang, C.; Liu, Z.; Wang, L.; Li, C.; Sun, M. Graph neural networks: A review of methods and applications. AI Open 2020, 1, 57–81. [Google Scholar] [CrossRef]
- Li, W.; Zhao, R.; Xiao, T.; Wang, X. DeepReID: Deep Filter Pairing Neural Network for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 152–159. [Google Scholar]
- Zhao, R.; Ouyang, W.; Wang, X. Learning Mid-Level Filters for Person Re-identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 144–151. [Google Scholar]
- Leng, L.; Li, M.; Kim, C.; Bi, X. Dual-Source Discrimination Power Analysis for Multi-Instance Contactless Palmprint Recognition. Multimed. Tools Appl. 2017, 76, 333–354. [Google Scholar] [CrossRef]
- Yi, D.; Lei, Z.; Liao, S.; Li, S.Z. Deep Metric Learning for Person Re-identification. In Proceedings of the 22nd International Conference on Pattern Recognition, Stockholm, Sweden, 24–28 August 2014; pp. 34–39. [Google Scholar]
- Yang, W.; Huang, H.; Zhang, Z.; Chen, X.; Huang, K.; Zhang, S. Towards Rich Feature Discovery with Class Activation Maps Augmentation for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 1389–1398. [Google Scholar]
- Wei, L.; Wei, Z.; Jin, Z.; Yu, Z.; Huang, J.; Cai, D.; He, X.; Hua, X.S. SIF: Self-Inspirited Feature Learning for Person Re-Identification. IEEE Trans. Image Process. 2020, 29, 4942–4951. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.; Li, X.; Zhuang, Y.; Wang, J. Deeply-Learned Part-Aligned Representations for Person Re-Identification. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3219–3228. [Google Scholar]
- Zhang, X.; Luo, H.; Fan, X.; Xiang, W.; Sun, Y.; Xiao, Q.; Jiang, W.; Zhang, C.; Sun, J. Alignedreid: Surpassing Human-Level Performance in Person Re-Identification. arXiv 2017, arXiv:1711.08184. [Google Scholar]
- Park, H.; Ham, B. Relation Network for Person Re-Identification. In Proceedings of the AAAI Conference on Artificial Intelligence, New York, NY, USA, 7–12 February 2020; pp. 11839–11847. [Google Scholar]
- Wei, S.E.; Ramakrishna, V.; Kanade, T.; Sheikh, Y. Convolutional Pose Machines. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4724–4732. [Google Scholar]
- Shelhamer, E.; Long, J.; Darrell, T. Fully Convolutional Networks for Semantic Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 640–651. [Google Scholar] [CrossRef]
- Cao, Z.; Simon, T.; Wei, S.E.; Sheikh, Y. Realtime Multi-Person 2D Pose Estimation Using Part Affinity Fields. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 7291–7299. [Google Scholar]
- Su, C.; Li, J.; Zhang, S.; Xing, J.; Gao, W.; Tian, Q. Pose-Driven Deep Convolutional Model for Person Re-Identification. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; pp. 3960–3969. [Google Scholar]
- Huang, H.; Yang, W.; Chen, X.; Zhao, X.; Huang, K.; Lin, J.; Huang, G.; Du, D. EANet: Enhancing Alignment for Cross-Domain Person Re-Identification. arXiv 2018, arXiv:1812.11369. [Google Scholar]
- Tay, C.P.; Roy, S.; Yap, K.H. AANet: Attribute Attention Network for Person Re-Identifications. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 7134–7143. [Google Scholar]
- Loy, C.C.; Liu, C.; Gong, S. Person Re-Identification by Manifold Ranking. In Proceedings of the IEEE International Conference on Image Processing, Melbourne, Australia, 15–18 September 2013; pp. 3567–3571. [Google Scholar]
- Bai, S.; Bai, X.; Tian, Q. Scalable Person Re-Identification on Supervised Smoothed Manifold. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 2530–2539. [Google Scholar]
- Zhong, Z.; Zheng, L.; Cao, D.; Li, S. Re-Ranking Person Re-Identification with k-Reciprocal Encoding. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1318–1327. [Google Scholar]
- Luo, C.; Chen, Y.; Wang, N.; Zhang, Z. Spectral Feature Transformation for Person Re-Identification. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; pp. 4976–4985. [Google Scholar]
- Bruna, J.; Zaremba, W.; Szlam, A.; LeCun, Y. Spectral Networks and Locally Connected Networks on Graphs. arXiv 2013, arXiv:1312.6203. [Google Scholar]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Liò, P.; Bengio, Y. Graph Attention Networks. arXiv 2017, arXiv:1710.10903. [Google Scholar]
- Shi, L.; Zhang, Y.; Cheng, J.; Lu, H. Two-Stream Adaptive Graph Convolutional Networks for Skeleton-Based Action Recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 12026–12035. [Google Scholar]
- Chen, Z.M.; Wei, X.S.; Wang, P.; Guo, Y. Multi-Label Image Recognition with Graph Convolutional Networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 5177–5186. [Google Scholar]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional Neural Networks on Graphs with Fast Localized Spectral Filtering. In Proceedings of the Advances in Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 1–9. [Google Scholar]
- Mohamed, A.; Qian, K.; Elhoseiny, M.; Claudel, C. Social-STGCNN: A Social Spatio-Temporal Graph Convolutional Neural Network for Human Trajectory Prediction. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020; pp. 14424–14432. [Google Scholar]
- Yan, S.; Xiong, Y.; Lin, D. Spatial Temporal Graph Convolutional Networks for Skeleton-Based Action Recognition. In Proceedings of the AAAI Conference on Artificial Intelligence, New Orleans, LA, USA, 2–7 February 2018; Volume 32. [Google Scholar]
- Wang, Z.; Zheng, L.; Li, Y.; Wang, S. Linkage Based Face Clustering via Graph Convolution Network. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 1117–1125. [Google Scholar]
- Niepert, M.; Ahmed, M.; Kutzkov, K. Learning Convolutional Neural Networks for Graphs. In Proceedings of the 33rd International Conference on Machine Learning, New York, NY, USA, 20–22 June 2016; pp. 2014–2023. [Google Scholar]
- Chen, D.; Xu, D.; Li, H.; Sebe, N.; Wang, X. Group Consistent Similarity Learning via Deep CRF for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 8649–8658. [Google Scholar]
- Yan, Y.; Zhang, Q.; Ni, B.; Zhang, W.; Xu, M.; Yang, X. Learning Context Graph for Person Search. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 2158–2167. [Google Scholar]
- Shen, Y.; Li, H.; Yi, S.; Chen, D.; Wang, X. Person Re-identification with Deep Similarity-Guided Graph Neural Network. In Proceedings of the European Conference on Computer Vision (ECCV), Stockholm, Sweden, 8–14 September 2018; pp. 486–504. [Google Scholar]
- Wu, Y.; Bourahla, O.E.F.; Li, X.; Wu, F.; Tian, Q.; Zhou, X. Adaptive Graph Representation Learning for Video Person Re-Identification. IEEE Trans. Image Process. 2020, 29, 8821–8830. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- Xiao, B.; Wu, H.; Wei, Y. Simple Baselines for Human Pose Estimation and Tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Stockholm, Sweden, 8–14 September 2018; pp. 466–481. [Google Scholar]
- Zheng, L.; Shen, L.; Tian, L.; Wang, S.; Wang, J.; Tian, Q. Scalable Person Re-Identification: A Benchmark. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), Santiago, Chile, 7–13 December 2015; pp. 1116–1124. [Google Scholar]
- Ristani, E.; Solera, F.; Zou, R.; Cucchiara, R.; Tomasi, C. Performance Measures and a Data Set for Multi-target, Multi-camera Tracking. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 10–16 October 2016; pp. 17–35. [Google Scholar]
- Wang, C.; Zhang, Q.; Huang, C.; Liu, W.; Wang, X. Mancs: A Multi-task Attentional Network with Curriculum Sampling for Person Re-identification. In Proceedings of the European Conference on Computer Vision (ECCV), Stockholm, Sweden, 8–14 September 2018; pp. 365–381. [Google Scholar]
- Wei, L.; Zhang, S.; Gao, W.; Tian, Q. Person Transfer GAN to Bridge Domain Gap for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 79–88. [Google Scholar]
- Wang, S.; Xu, X.; Liu, L.; Tian, J. Multi-level feature fusion model-based real-time person re-identification for forensics. J. Real-Time Image Process. 2020, 17, 73–81. [Google Scholar] [CrossRef]
- Song, C.; Huang, Y.; Ouyang, W.; Wang, L. Mask-Guided Contrastive Attention Model for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 1179–1188. [Google Scholar]
- Huang, H.; Li, D.; Zhang, Z.; Chen, X.; Huang, K. Adversarially Occluded Samples for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 5098–5107. [Google Scholar]
- Wang, Y.; Wang, L.; You, Y.; Zou, X.; Chen, V.; Li, S.; Huang, G.; Hariharan, B.; Weinberger, K.Q. Resource Aware Person Re-Identification Across Multiple Resolutions. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 8042–8051. [Google Scholar]
- Chang, X.; Hospedales, T.M.; Xiang, T. Multi-Level Factorisation Net for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 2109–2118. [Google Scholar]
- Li, W.; Zhu, X.; Gong, S. Harmonious Attention Network for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–22 June 2018; pp. 2285–2294. [Google Scholar]
- Hou, R.; Ma, B.; Chang, H.; Gu, X.; Shan, S.; Chen, X. Interaction-and-Aggregation Network for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 9317–9326. [Google Scholar]
- Quan, R.; Dong, X.; Wu, Y.; Zhu, L.; Yang, Y. Auto-ReID: Searching for a Part-Aware ConvNet for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 3750–3759. [Google Scholar]
- Zheng, Z.; Yang, X.; Yu, Z.; Zheng, L.; Yang, Y.; Kautz, J. Joint Discriminative and Generative Learning for Person Re-Identification. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 2138–2147. [Google Scholar]
- Wang, K.; Ding, C.; Maybank, S.J.; Tao, D. CDPM: Convolutional Deformable Part Models for Semantically Aligned Person Re-Identification. IEEE Trans. Image Process. 2020, 29, 3416–3428. [Google Scholar] [CrossRef] [PubMed]
- Zhou, K.; Yang, Y.; Cavallaro, A.; Xiang, T. Learning Generalisable Omni-Scale Representations for Person Re-Identification. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 5056–5069. [Google Scholar] [CrossRef]
- Wang, M.; Ma, H.; Huang, Y. Information Complementary Attention-Based Multidimension Feature Learning for Person Re-Identification. Eng. Appl. Artif. Intell. 2023, 123, 106348. [Google Scholar] [CrossRef]
- Lin, X.; Zhu, L.; Yang, S.; Wang, Y. Diff Attention: A Novel Attention Scheme for Person Re-Identification. Comput. Vis. Image Underst. 2023, 228, 103623. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | Market-1501 | DukeMTMC-reID | CUHK03 | MSMT17 | ||||
|---|---|---|---|---|---|---|---|---|
| mAP (%) | Rank-1 (%) | mAP (%) | Rank-1 (%) | mAP (%) | Rank-1 (%) | mAP (%) | Rank-1 (%) | |
| CNN | 84.1 | 94.0 | 73.0 | 85.6 | 66.8 | 72.1 | 52.8 | 78.5 |
| CNN + re-ranking | 89.9 | 95.1 | 82.7 | 88.4 | 74.7 | 73.5 | 58.2 | 81.4 |
| CNN + S_sharing | 86.0 | 94.7 | 74.5 | 86.1 | 69.1 | 72.5 | 57.2 | 79.7 |
| CNN + S | 86.6 | 95.0 | 75.2 | 86.9 | 70.7 | 73.0 | 57.6 | 80.1 |
| CNN + O_single | 86.9 | 95.3 | 75.1 | 87.5 | 72.5 | 73.4 | 58.0 | 80.7 |
| CNN + O_updating | 87.7 | 95.3 | 76.6 | 88.4 | 72.6 | 73.9 | 58.1 | 80.3 |
| CNN + O | 87.6 | 95.5 | 76.3 | 88.2 | 72.8 | 73.6 | 58.2 | 81.0 |
| CNN + S + O | 89.0 | 95.9 | 78.1 | 89.0 | 73.9 | 74.6 | 59.1 | 81.5 |
| LRGCN_concatenating | 88.0 | 94.4 | 76.7 | 87.3 | 71.4 | 72.9 | 56.5 | 78.1 |
| LRGCN | 90.7 | 96.5 | 80.0 | 90.6 | 75.3 | 76.1 | 60.6 | 82.7 |
| Methods | Market-1501 | |
|---|---|---|
| mAP (%) | Rank-1 (%) | |
| BoW + kissme [57] | 20.8 | 44.4 |
| MFFM (HOG + LBP) [61] | - | 70.1 |
| MGCAM [62] | 74.3 | 83.8 |
| AOS [63] | 70.4 | 86.5 |
| DaRe [64] | 76.0 | 89.0 |
| MLFN [65] | 74.3 | 90.0 |
| HA-CNN [66] | 75.7 | 91.2 |
| SGGNN [53] | 82.8 | 92.3 |
| PCB [18] | 77.3 | 92.4 |
| Mancs [59] | 82.3 | 93.1 |
| GCSL [51] | 81.6 | 93.5 |
| EANet [36] | 84.5 | 94.4 |
| IANet [67] | 83.1 | 94.4 |
| Auto-ReID [68] | 85.1 | 94.5 |
| CAMA [27] | 84.5 | 94.7 |
| DG-Net [69] | 86.0 | 94.8 |
| CDPM [70] | 86.0 | 95.2 |
| RNet-S [31] | 88.0 | 94.8 |
| OSNet [71] | 86.7 | 94.8 |
| ICA [72] | 82.3 | 93.3 |
| AGW + DA + Joint [73] | 88.6 | 95.2 |
| LRGCN (Ours) | 90.7 | 96.5 |
| Methods | DukeMTMC-reID | |
|---|---|---|
| mAP (%) | rank-1 (%) | |
| BoW + kissme [57] | 12.2 | 25.1 |
| AOS [63] | 62.1 | 79.2 |
| DaRe [64] | 64.5 | 80.2 |
| HA-CNN [66] | 63.8 | 80.5 |
| MLFN [65] | 62.8 | 81.0 |
| SGGNN [53] | 68.2 | 81.1 |
| PCB [18] | 65.3 | 81.9 |
| GCSL [51] | 69.5 | 84.9 |
| Mancs [59] | 71.8 | 84.9 |
| CAMA [27] | 72.9 | 85.8 |
| EANet [36] | 73.3 | 86.1 |
| DG-Net [69] | 74.8 | 86.6 |
| IANet [67] | 73.4 | 87.1 |
| CDPM [70] | 77.5 | 88.2 |
| RNet-S [31] | 77.1 | 89.3 |
| OSNet [71] | 76.6 | 88.7 |
| ICA [72] | 71.6 | 85.6 |
| LRGCN (Ours) | 80.0 | 90.6 |
| Methods | CUHK03 | |
|---|---|---|
| mAP (%) | Rank-1 (%) | |
| BoW + kissme [57] | 6.4 | 6.4 |
| HA-CNN [66] | 38.6 | 41.7 |
| MGCAM [62] | 46.9 | 46.7 |
| AOS [63] | 43.3 | 47.1 |
| MLFN [65] | 47.8 | 52.8 |
| PCB [18] | 54.2 | 61.3 |
| DaRe [64] | 59.0 | 63.3 |
| Mancs [59] | 60.5 | 65.5 |
| CAMA [27] | 64.2 | 66.6 |
| EANet [36] | 66.2 | 72.0 |
| Auto-ReID [68] | 69.3 | 73.3 |
| CDPM [70] | 67.0 | 71.9 |
| RNet-S [31] | 69.5 | 72.5 |
| OSNet [71] | 67.8 | 72.3 |
| ICA [72] | 59.3 | 64.6 |
| AGW + DA + Joint [73] | 69.2 | 70.3 |
| LRGCN (Ours) | 75.3 | 76.1 |
| Methods | MSMT17 | |
|---|---|---|
| mAP (%) | Rank-1 (%) | |
| IANet [67] | 46.8 | 75.5 |
| DG-Net [69] | 52.3 | 77.2 |
| Auto-ReID [68] | 52.5 | 78.2 |
| OSNet [71] | 55.1 | 79.1 |
| AGW + DA + Joint [73] | 50.0 | 68.2 |
| LRGCN (Ours) | 60.6 | 82.7 |
| Methods | Market-1501 | DukeMTMC-reID | CUHK03 | MSMT17 | ||||
|---|---|---|---|---|---|---|---|---|
| q:3368 | g:15913 | q:2228 | g:17661 | q:1400 | g:5332 | q:11659 | g:82161 | |
| ms | fps | ms | fps | ms | fps | ms | fps | |
| CNN | 13 | 77 | 15 | 67 | 5 | 200 | 73 | 14 |
| LRGCN (Ours) | 22 | 45 | 25 | 40 | 12 | 83 | 112 | 9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lian, Y.; Huang, W.; Liu, S.; Guo, P.; Zhang, Z.; Durrani, T.S. Person Re-Identification Using Local Relation-Aware Graph Convolutional Network. Sensors 2023, 23, 8138. https://doi.org/10.3390/s23198138
Lian Y, Huang W, Liu S, Guo P, Zhang Z, Durrani TS. Person Re-Identification Using Local Relation-Aware Graph Convolutional Network. Sensors. 2023; 23(19):8138. https://doi.org/10.3390/s23198138
Chicago/Turabian StyleLian, Yu, Wenmin Huang, Shuang Liu, Peng Guo, Zhong Zhang, and Tariq S. Durrani. 2023. "Person Re-Identification Using Local Relation-Aware Graph Convolutional Network" Sensors 23, no. 19: 8138. https://doi.org/10.3390/s23198138
APA StyleLian, Y., Huang, W., Liu, S., Guo, P., Zhang, Z., & Durrani, T. S. (2023). Person Re-Identification Using Local Relation-Aware Graph Convolutional Network. Sensors, 23(19), 8138. https://doi.org/10.3390/s23198138