

Influence of Smart Sensors on Structural Health Monitoring Systems and Future Asset Management Practices

 ,
,
Abstract
:1. Introduction
2. Different Sensor Technologies
- Acquiring more reliable data;
- Accessing the locations remotely;
- Less disturbance for the usage of the structure during the inspection;
- Ability to detect both internal and surface defects;
- Digital transmission and storage;
- Data can be effectively used to predict the severity of the defect and the remaining life time of the member.
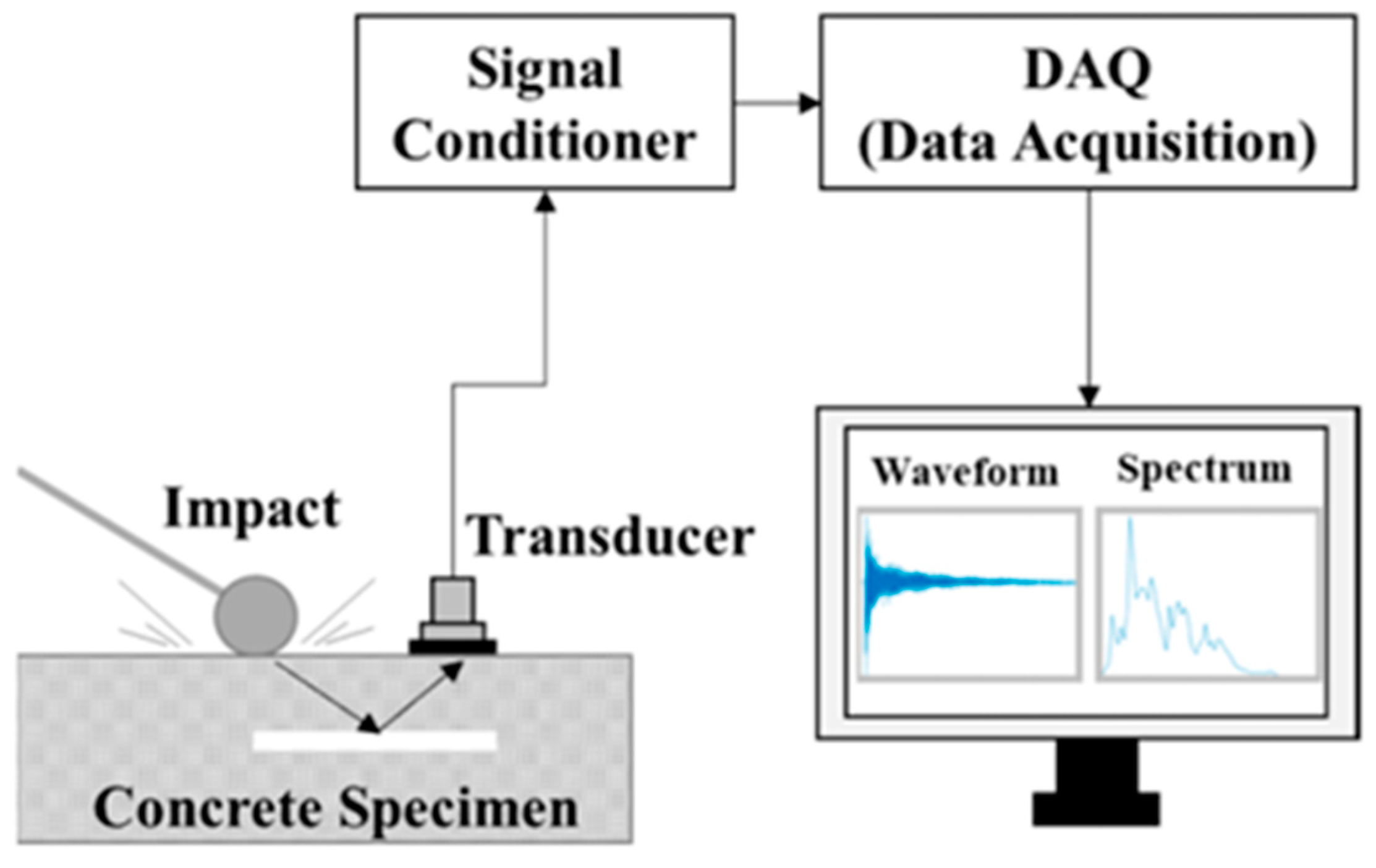
2.1. Ultrasound Sensors
Application of Ultrasonic Pulse Velocity
2.2. Mechanical Sensors
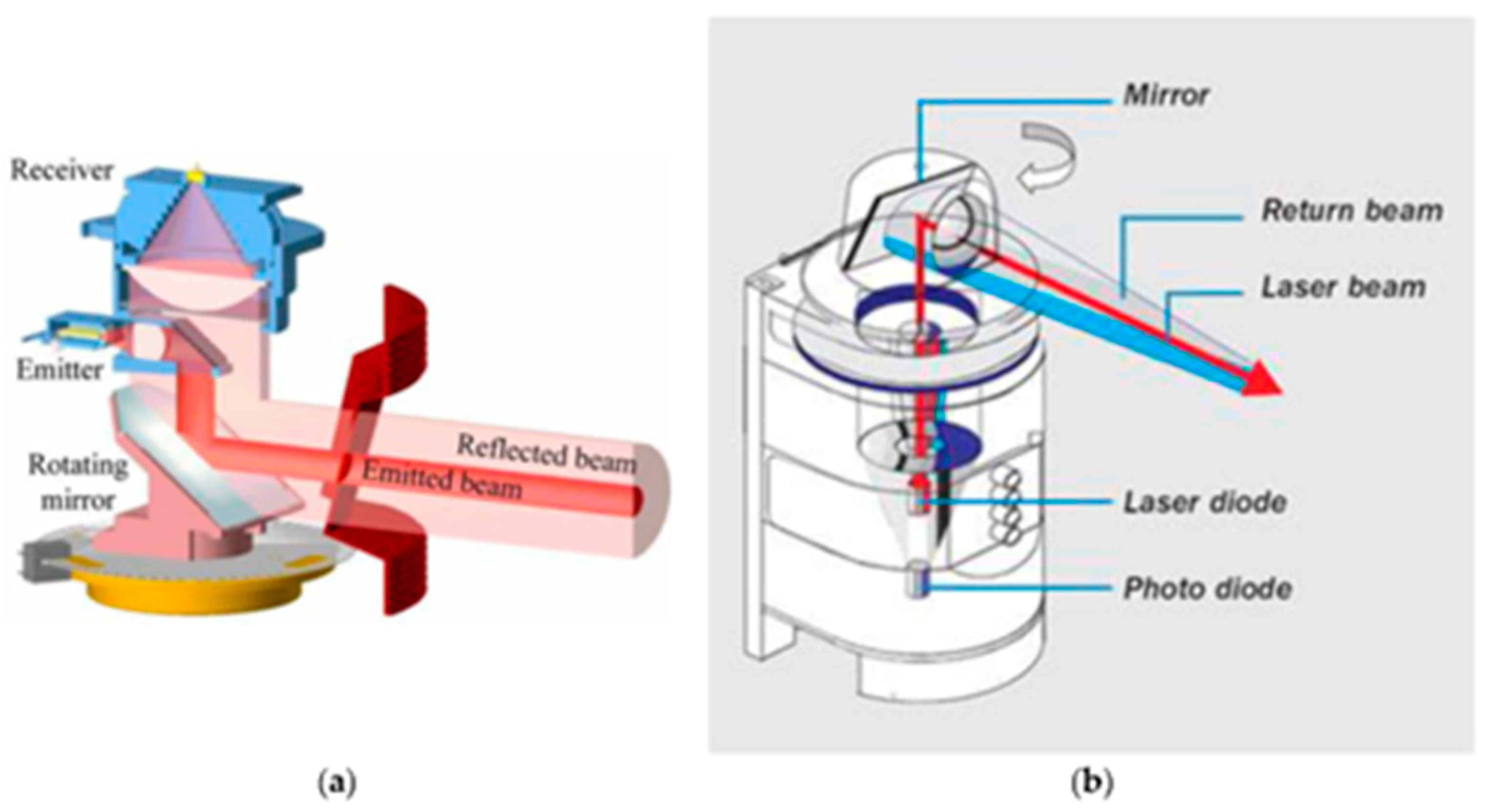
2.3. Laser Sensors
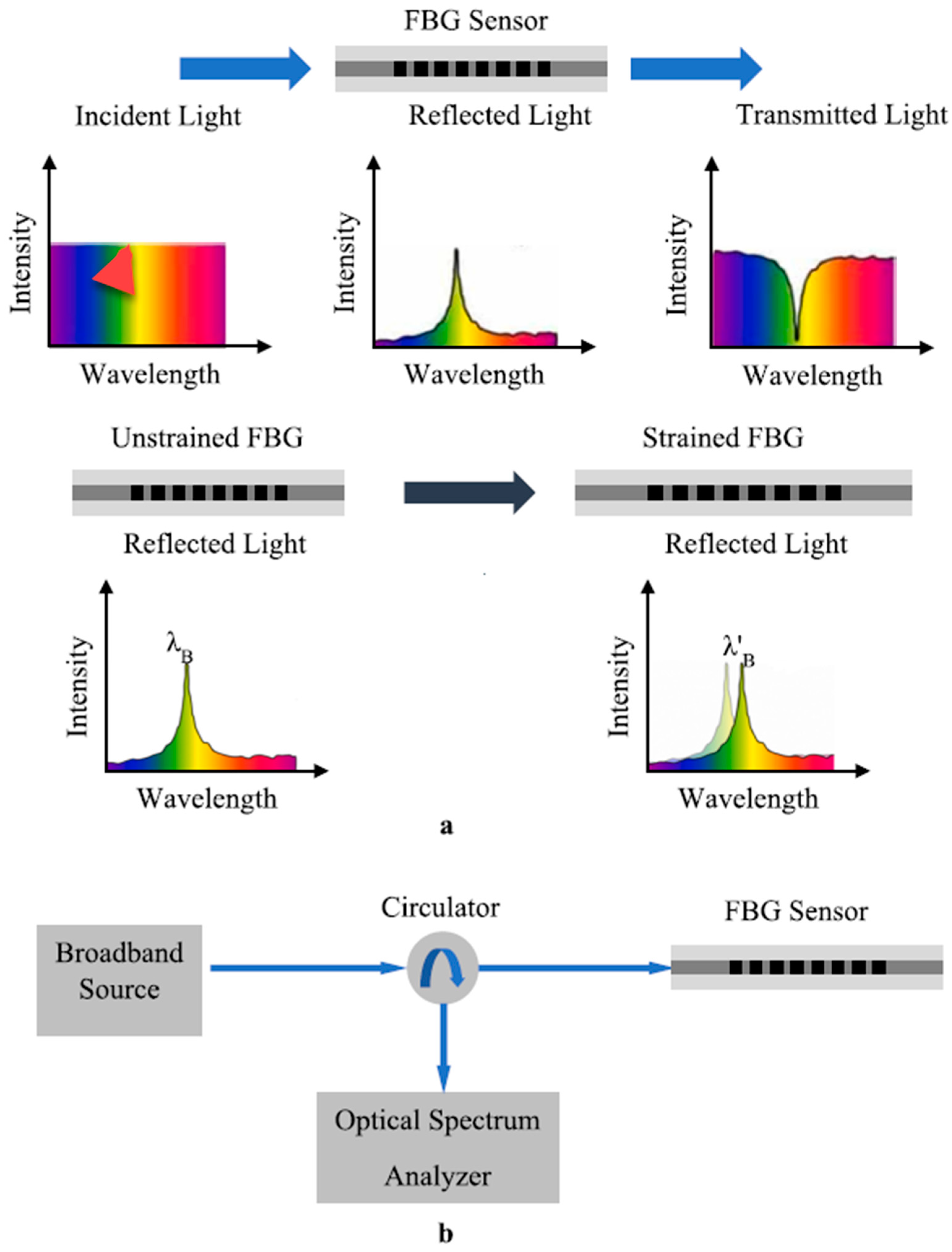
2.4. Optical Sensors
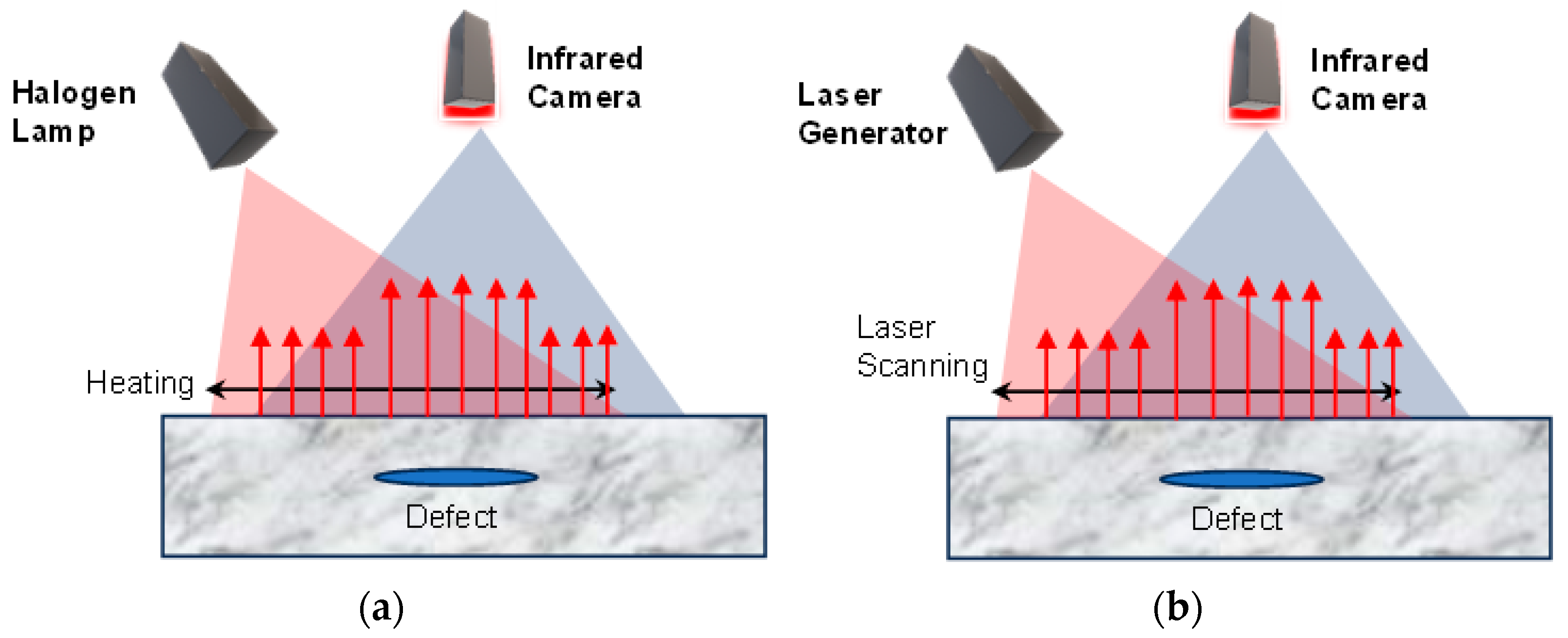
2.5. Infrared Thermographic Sensors
2.6. Ground-Penetrating Radar Sensors
2.7. Electrical Parameter Measuring Sensors
2.8. Micro-Electro-Mechanical Systems Sensors
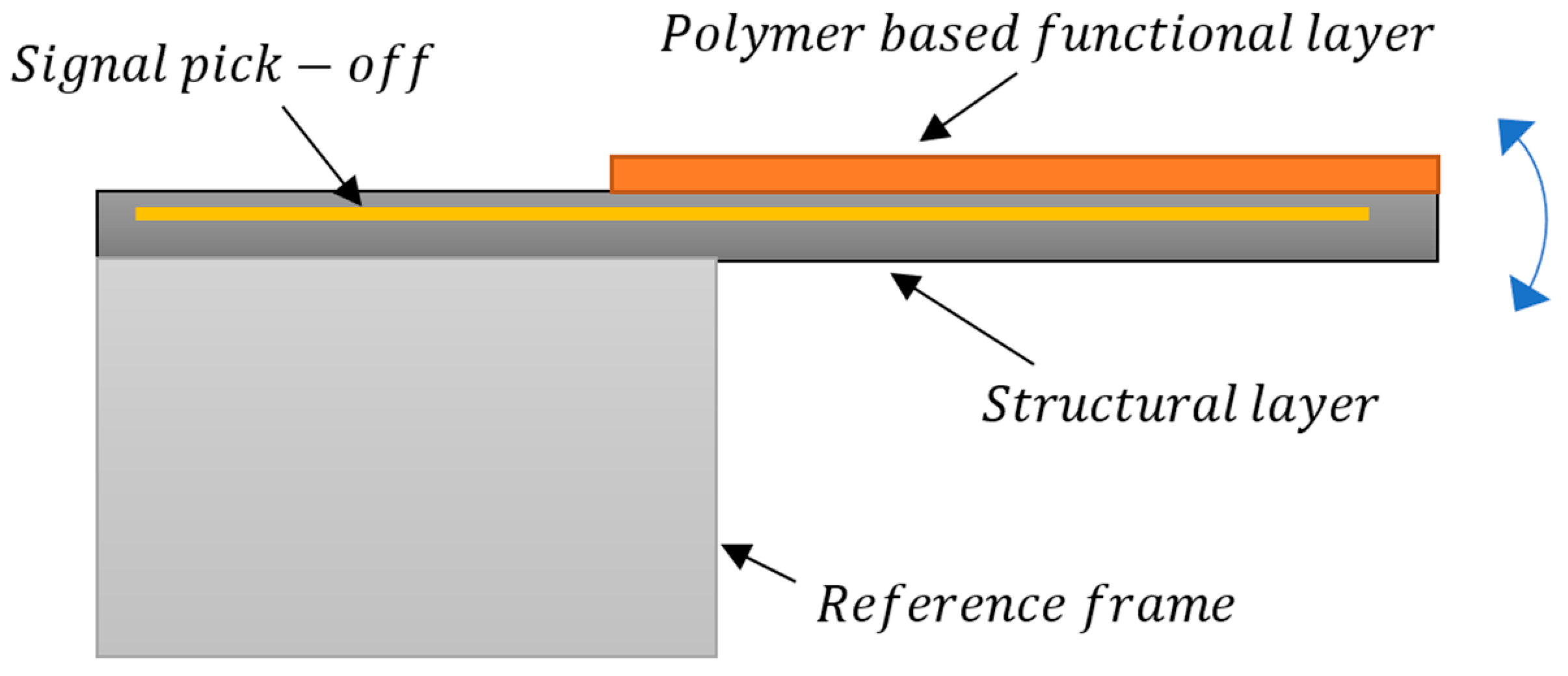
MEMS Sensor Design Scheme
3. Automated Systems for Structural Health Monitoring
4. Role of Artificial Intelligence in Structural Health Monitoring
4.1. Artificial Intelligence and Machine Learning for Structural Health Monitoring
4.2. Deep Learning for Structural Health Monitoring
4.3. Digital Twin in Structural Health Monitoring

5. Paradigm Shift in Asset Management with Intelligent and Data-Driven Structural Health Monitoring Systems
- Asset management is policy driven.
- Asset management is performance-based.
- Asset management examines options and trade-offs at each level of decision-making.
- Asset management bases decisions on merit.
- Asset management maintains clear accountability.
- Goals and policies (reflects customer input);
- Asset inventory;
- Condition assessment and performance modeling;
- Alternatives evaluation and performance modeling;
- Short-term and long-term plans (project selection);
- Program implementation;
- Performance monitoring (feedback).
- Visual assessments;
- Laser profiling/roughness meters;
- Life expectancy review;
- Manual inspections (operators);
- Protection (paint) thickness;
- Capacity modeling (for failure);
- X-ray;
- Concrete decomposition testing and core sampling;
- Power usage monitoring.
- In prioritizing maintenance activities;
- Of optimizing cost in maintenance activities;
- In determining best intervention times for asset renewals.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sony, S.; Laventure, S.; Sadhu, A. A Literature Review of Next-Generation Smart Sensing Technology in Structural Health Monitoring. Struct. Control Health Monit. 2019, 26, e2321. [Google Scholar] [CrossRef]
- Mishra, M.; Lourenço, P.B.; Ramana, G.V. Structural Health Monitoring of Civil Engineering Structures by Using the Internet of Things: A Review. J. Build. Eng. 2022, 48, 103954. [Google Scholar] [CrossRef]
- Flammini, F.; Pragliola, C.; Smarra, G. Railway Infrastructure Monitoring by Drones. In Proceedings of the 2016 International Conference on Electrical Systems for Aircraft, Railway, Ship Propulsion and Road Vehicles & International Transportation Electrification Conference (ESARS-ITEC), Toulouse, France, 2–4 November 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Lv, Z.; Hu, B.; Lv, H. Infrastructure Monitoring and Operation for Smart Cities Based on IoT System. IEEE Trans. Ind. Inf. 2020, 16, 1957–1962. [Google Scholar] [CrossRef]
- Barsocchi, P.; Bartoli, G.; Betti, M.; Girardi, M.; Mammolito, S.; Pellegrini, D.; Zini, G. Wireless Sensor Networks for Continuous Structural Health Monitoring of Historic Masonry Towers. Int. J. Archit. Herit. 2021, 15, 22–44. [Google Scholar] [CrossRef]
- Naraharisetty, V.; Talari, V.S.; Neridu, S.; Kalapatapu, P.; Pasupuleti, V.D.K. Cloud Architecture For IOT Based Bridge Monitoring Applications. In Proceedings of the 2021 International Conference on Emerging Techniques in Computational Intelligence (ICETCI), Hyderabad, India, 25–27 August 2021; IEEE: Hyderabad, India, 2021; pp. 39–42. [Google Scholar]
- Mahmud, M.A.; Bates, K.; Wood, T.; Abdelgawad, A.; Yelamarthi, K. A Complete Internet of Things (IoT) Platform for Structural Health Monitoring (SHM). In Proceedings of the 2018 IEEE 4th World Forum on Internet of Things (WF-IoT), Singapore, 5–8 February 2018; IEEE: Singapore, 2018; pp. 275–279. [Google Scholar]
- Frank, R. Understanding Smart Sensors, 3rd ed.; Artech House Integrated Microsystems Library; Artech House: Boston, MA, USA, 2013; ISBN 978-1-60807-507-2. [Google Scholar]
- Kaartinen, E.; Dunphy, K.; Sadhu, A. LiDAR-Based Structural Health Monitoring: Applications in Civil Infrastructure Systems. Sensors 2022, 22, 4610. [Google Scholar] [CrossRef] [PubMed]
- Jayawickrema, U.M.N.; Herath, H.M.C.M.; Hettiarachchi, N.K.; Sooriyaarachchi, H.P.; Epaarachchi, J.A. Fibre-Optic Sensor and Deep Learning-Based Structural Health Monitoring Systems for Civil Structures: A Review. Measurement 2022, 199, 111543. [Google Scholar] [CrossRef]
- Palma, V.; Iovane, G.; Hwang, S.; Mazzolani, F.M.; Landolfo, R.; Sohn, H.; Faggiano, B. Innovative Technologies for Structural Health Monitoring of SFTs: Proposal of Combination of Infrared Thermography with Mixed Reality. J. Civ. Struct. Health Monit. 2023. [Google Scholar] [CrossRef]
- Villagrán-Zaccardi, Y.; Alderete, N.; Pico-Cortés, C.; Zega, C.; Risdanareni, P.; De Belie, N. Effect of Wastes as Supplementary Cementitious Materials on the Transport Properties of Concrete. In Waste and Byproducts in Cement-Based Materials; Elsevier: Amsterdam, The Netherlands, 2021; pp. 191–227. ISBN 978-0-12-820549-5. [Google Scholar]
- IS 13311-1; Method of Non-Destructive Testing of Concret, Part 1: Ultrasonic Pulse Velocity. Bureau of Indian Standards: New Delhi, India, 1992.
- Kaliyavaradhan, S.K.; Ling, T.-C. Performance of Concrete with PVC Fibres. In Use of Recycled Plastics in Eco-Efficient Concrete; Elsevier: Amsterdam, The Netherlands, 2019; pp. 369–385. ISBN 978-0-08-102676-2. [Google Scholar]
- Singh, N.; Kumar, P.; Goyal, P. Reviewing the Behaviour of High Volume Fly Ash Based Self Compacting Concrete. J. Build. Eng. 2019, 26, 100882. [Google Scholar] [CrossRef]
- Janků, M.; Cikrle, P.; Grošek, J.; Anton, O.; Stryk, J. Comparison of Infrared Thermography, Ground-Penetrating Radar and Ultrasonic Pulse Echo for Detecting Delaminations in Concrete Bridges. Constr. Build. Mater. 2019, 225, 1098–1111. [Google Scholar] [CrossRef]
- Yazdani, N.; Garcia, E.C.; Riad, M. Field Assessment of Concrete Structures Rehabilitated with FRP. In Eco-Efficient Repair and Rehabilitation of Concrete Infrastructures; Elsevier: Amsterdam, The Netherlands, 2018; pp. 171–194. ISBN 978-0-08-102181-1. [Google Scholar]
- Yoon, Y.-G.; Kim, C.-M.; Oh, T.-K. A Study on the Applicability of the Impact-Echo Test Using Semi-Supervised Learning Based on Dynamic Preconditions. Sensors 2022, 22, 5484. [Google Scholar] [CrossRef] [PubMed]
- Raj, T.; Hashim, F.H.; Huddin, A.B.; Ibrahim, M.F.; Hussain, A. A Survey on LiDAR Scanning Mechanisms. Electronics 2020, 9, 741. [Google Scholar] [CrossRef]
- Anastasopoulos, D.; De Roeck, G.; Reynders, E.P.B. One-Year Operational Modal Analysis of a Steel Bridge from High-Resolution Macrostrain Monitoring: Influence of Temperature vs. Retrofitting. Mech. Syst. Signal Process. 2021, 161, 107951. [Google Scholar] [CrossRef]
- He, J.-H.; Liu, D.-P.; Chung, C.-H.; Huang, H.-H. Infrared Thermography Measurement for Vibration-Based Structural Health Monitoring in Low-Visibility Harsh Environments. Sensors 2020, 20, 7067. [Google Scholar] [CrossRef] [PubMed]
- Amjad, K.; Lambert, P.; Middleton, C.A.; Greene, R.J.; Patterson, E.A. A Thermal Emissions-Based Real-Time Monitoring System for in Situ Detection of Fatigue Cracks. Proc. R. Soc. A 2022, 478, 20210796. [Google Scholar] [CrossRef]
- Dong, Y.; Ansari, F. Non-Destructive Testing and Evaluation (NDT/NDE) of Civil Structures Rehabilitated Using Fiber Reinforced Polymer (FRP) Composites. In Service Life Estimation and Extension of Civil Engineering Structures; Elsevier: Amsterdam, The Netherlands, 2011; pp. 193–222. ISBN 978-1-84569-398-5. [Google Scholar]
- Zhang, Y.; Xia, T.; Huston, D. Radar Technology. In Sensor Technologies for Civil Infrastructures; Elsevier: Amsterdam, The Netherlands, 2022; pp. 169–209. ISBN 978-0-08-102696-0. [Google Scholar]
- Elsheikhi, S.; Karakale, V.; Benyounis, K.Y. Developments in the Application of Field-Specific Synthesizing of Sensing Technology: Civil Engineering Application of Ground Penetrating Radar Sensing Technology. In Reference Module in Materials Science and Materials Engineering; Elsevier: Amsterdam, The Netherlands, 2022; ISBN 978-0-12-803581-8. [Google Scholar]
- Thiyagarajan, K.; Acharya, P.; Piyathilaka, L.; Kodagoda, S. Numerical Modeling of the Effects of Electrode Spacing and Multilayered Concrete Resistivity on the Apparent Resistivity Measured Using Wenner Method. In Proceedings of the 2020 15th IEEE Conference on Industrial Electronics and Applications (ICIEA), Kristiansand, Norway, 9–13 November 2020; IEEE: Kristiansand, Norway, 2020; pp. 200–206. [Google Scholar]
- Wickramanayake, S.; Thiyagarajan, K.; Kodagoda, S.; Piyathilaka, L. Frequency Sweep Based Sensing Technology for Non-Destructive Electrical Resistivity Measurement of Concrete. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction, ISARC 2019, Banff, AB, Canada, 21–24 May 2019. [Google Scholar]
- Meoni, A.; D’Alessandro, A.; Mancinelli, M.; Ubertini, F. A Multichannel Strain Measurement Technique for Nanomodified Smart Cement-Based Sensors in Reinforced Concrete Structures. Sensors 2021, 21, 5633. [Google Scholar] [CrossRef]
- Piyathilaka, L.; Sooriyaarachchi, B.; Kodagoda, S.; Thiyagarajan, K. Capacitive Sensor Based 2D Subsurface Imaging Technology for Non-Destructive Evaluation of Building Surfaces. In Proceedings of the 2019 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Bangkok, Thailand, 18–20 November 2019; IEEE: Bangkok, Thailand, 2019; pp. 287–292. [Google Scholar]
- Preethichandra, D.M.G.; Shida, K. A Simple Interface Circuit to Measure Very Small Capacitance Changes in Capacitive Sensors. In Proceedings of the Proceedings of the 17th IEEE Instrumentation and Measurement Technology Conference [Cat. No. 00CH37066], Baltimore, MD, USA, 1–4 May 2000; IEEE: Baltimore, MD, USA, 2000; pp. 406–409. [Google Scholar]
- Vinodhini, G.; Aniruddhan, S.; George, B.; Devi, J.D.; Ramakrishna, P.V. A Simple and Efficient Oscillator Based Read-out Scheme for LVDT. In Proceedings of the 2017 IEEE International Instrumentation and Measurement Technology Conference (I2MTC), Torino, Italy, 22–25 May 2017; IEEE: Torino, Italy, 2017; pp. 1–5. [Google Scholar]
- Ramadoss, N.; George, B. A Simple Microcontroller Based Digitizer for Differential Inductive Sensors. In Proceedings of the 2015 IEEE International Instrumentation and Measurement Technology Conference (I2MTC) Proceedings, Pisa, Italy, 11–14 May 2015; IEEE: Pisa, Italy, 2015; pp. 148–153. [Google Scholar]
- Qiu, L.; Lin, X.; Yuan, S.; Shi, W. A Lightweight System With Ultralow-Power Consumption for Online Continuous Impact Monitoring of Aerospace Vehicle Structures. IEEE Trans. Ind. Electron. 2021, 68, 5281–5292. [Google Scholar] [CrossRef]
- Yuan, S.; Wang, H.; Chen, J. A PZT Based On-Line Updated Guided Wave–Gaussian Process Method for Crack Evaluation. IEEE Sens. J. 2020, 20, 8204–8212. [Google Scholar] [CrossRef]
- Zhang, J.; Huang, H.; Huang, C.; Zhang, B.; Li, Y.; Wang, K.; Su, D.; Tian, G.Y. A Configurable Dielectric Resonator-Based Passive Wireless Sensor for Crack Monitoring. IEEE Trans. Antennas Propagat. 2019, 67, 5746–5749. [Google Scholar] [CrossRef]
- Huang, C.; Huang, B.; Zhang, B.; Li, Y.; Zhang, J.; Wang, K. An Electromagnetically Induced Transparency Inspired Antenna Sensor for Crack Monitoring. IEEE Sens. J. 2021, 21, 651–658. [Google Scholar] [CrossRef]
- Dey, S.; Kalansuriya, P.; Karmakar, N.C. Novel Chipless RFID High Resolution Crack Sensor Based on SWB Technology. IEEE Sens. J. 2021, 21, 2908–2920. [Google Scholar] [CrossRef]
- Ossa-Molina, O.; Duque-Giraldo, J.; Reyes-Vera, E. Strain Sensor Based on Rectangular Microstrip Antenna: Numerical Methodologies and Experimental Validation. IEEE Sens. J. 2021, 21, 22908–22917. [Google Scholar] [CrossRef]
- Cao, H.; Thakar, S.K.; Oseng, M.L.; Nguyen, C.M.; Jebali, C.; Kouki, A.B.; Chiao, J.-C. Development and Characterization of a Novel Interdigitated Capacitive Strain Sensor for Structural Health Monitoring. IEEE Sens. J. 2015, 15, 6542–6548. [Google Scholar] [CrossRef]
- Xu, J.; Jo, H. Development of High-Sensitivity and Low-Cost Electroluminescent Strain Sensor for Structural Health Monitoring. IEEE Sens. J. 2016, 16, 1962–1968. [Google Scholar] [CrossRef]
- Giannelli, P.; Bulletti, A.; Capineri, L. Multifunctional Piezopolymer Film Transducer for Structural Health Monitoring Applications. IEEE Sens. J. 2017, 17, 4583–4586. [Google Scholar] [CrossRef]
- Xie, C.; Liu, T.; Pei, C.; Chen, Z. A Flexible Thin-Film Magnetostrictive Patch Guided-Wave Transducer for Structural Health Monitoring. IEEE Sens. J. 2022, 22, 12237–12244. [Google Scholar] [CrossRef]
- Birgin, H.B.; García-Macías, E.; D’Alessandro, A.; Ubertini, F. Self-Powered Weigh-in-Motion System Combining Vibration Energy Harvesting and Self-Sensing Composite Pavements. Constr. Build. Mater. 2023, 369, 130538. [Google Scholar] [CrossRef]
- Baptista, F.G.; Filho, J.V. Optimal Frequency Range Selection for PZT Transducers in Impedance-Based SHM Systems. IEEE Sens. J. 2010, 10, 1297–1303. [Google Scholar] [CrossRef]
- Mariani, S.; Corigliano, A.; Caimmi, F.; Bruggi, M.; Bendiscioli, P.; De Fazio, M. MEMS-Based Surface Mounted Health Monitoring System for Composite Laminates. Microelectron. J. 2013, 44, 598–605. [Google Scholar] [CrossRef]
- Ferreira, P.M.; Machado, M.A.; Carvalho, M.S.; Vidal, C. Embedded Sensors for Structural Health Monitoring: Methodologies and Applications Review. Sensors 2022, 22, 8320. [Google Scholar] [CrossRef] [PubMed]
- Yan, J.; Downey, A.; Cancelli, A.; Laflamme, S.; Chen, A.; Li, J.; Ubertini, F. Concrete Crack Detection and Monitoring Using a Capacitive Dense Sensor Array. Sensors 2019, 19, 1843. [Google Scholar] [CrossRef]
- Haus, J.N.; Lang, W.; Roloff, T.; Rittmeier, L.; Bornemann, S.; Sinapius, M.; Dietzel, A. MEMS Vibrometer for Structural Health Monitoring Using Guided Ultrasonic Waves. Sensors 2022, 22, 5368. [Google Scholar] [CrossRef]
- Saafi, M.; Romine, P. Preliminary Evaluation of MEMS Devices for Early Age Concrete Property Monitoring. Cem. Concr. Res. 2005, 35, 2158–2164. [Google Scholar] [CrossRef]
- Norris, A.; Saafi, M.; Romine, P. Temperature and Moisture Monitoring in Concrete Structures Using Embedded Nanotechnology/Microelectromechanical Systems (MEMS) Sensors. Constr. Build. Mater. 2008, 22, 111–120. [Google Scholar] [CrossRef]
- Gong, X.; Kuo, Y.-C.; Zhou, G.; Wu, W.-J.; Liao, W.-H. An Aerosol Deposition Based MEMS Piezoelectric Accelerometer for Low Noise Measurement. Microsyst Nanoeng 2023, 9, 23. [Google Scholar] [CrossRef] [PubMed]
- Ceylan, H.; Dong, L.; Jiao, Y.; Yavas, S.; Yang, S.; Sunghwan, K.; Gopalakrishnan, K.; Taylor, P. Development of a Wireless MEMS Multifunction Sensor System and Field Demonstration of Embedded Sensors for Monitoring Concrete Pavements; Iowa State University: Ames, IA, USA, 2016. [Google Scholar]
- JACOB, A.A.; Galipali, M.; Upadhyay, V.; Balasubramaniam, K. A Novel Ultrasonic Inspection Methodology for Submerged Metallic Structures Using a Remotely Operated Vehicle (ROV). In Proceedings of the NDE 2017 Conference & Exhibition of the Society for NDT (ISNT), Chennai, TN, India, 14–16 December 2017. [Google Scholar]
- La, H.M.; Dinh, T.H.; Pham, N.H.; Ha, Q.P.; Pham, A.Q. Automated Robotic Monitoring and Inspection of Steel Structures and Bridges. Robotica 2019, 37, 947–967. [Google Scholar] [CrossRef]
- DeVault, J.E. Robotic System for Underwater Inspection of Bridge Piers. IEEE Instrum. Meas. Mag. 2000, 3, 32–37. [Google Scholar] [CrossRef]
- Gaspari, F.; Ioli, F.; Barbieri, F.; Belcore, E.; Pinto, L. Integration of UAV-Lidar and UAV-Photogrammetry for Infrastructure Monitoring and Bridge Assessment. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, 43, 995–1002. [Google Scholar] [CrossRef]
- Henry, C.; Poudel, S.; Lee, S.-W.; Jeong, H. Automatic Detection System of Deteriorated PV Modules Using Drone with Thermal Camera. Appl. Sci. 2020, 10, 3802. [Google Scholar] [CrossRef]
- Kim, H.; Lee, J.; Ahn, E.; Cho, S.; Shin, M.; Sim, S.-H. Concrete Crack Identification Using a UAV Incorporating Hybrid Image Processing. Sensors 2017, 17, 2052. [Google Scholar] [CrossRef] [PubMed]
- Meng, S.; Gao, Z.; Zhou, Y.; He, B.; Djerrad, A. Real-time Automatic Crack Detection Method Based on Drone. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 849–872. [Google Scholar] [CrossRef]
- Piyathilaka, L.; Preethichandra, D.M.G.; Izhar, U.; Kahandawa, G. Real-Time Concrete Crack Detection and Instance Segmentation Using Deep Transfer Learning. Eng. Proc. 2020, 2, 91. [Google Scholar]
- Puri, N.; Turkan, Y. Bridge Construction Progress Monitoring Using Lidar and 4D Design Models. Autom. Constr. 2020, 109, 102961. [Google Scholar] [CrossRef]
- Gunatilake, A.; Piyathilaka, L.; Kodagoda, S.; Barclay, S.; Vitanage, D. Real-Time 3D Profiling with RGB-D Mapping in Pipelines Using Stereo Camera Vision and Structured IR Laser Ring. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 916–921. [Google Scholar]
- Zou, J.-T.; Rajveer, G.V. Drone-Based Solar Panel Inspection with 5G and AI Technologies. In Proceedings of the 2022 8th International Conference on Applied System Innovation (ICASI), Nantou, Taiwan, 21–23 April 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 174–178. [Google Scholar]
- Lee, S.; An, K.E.; Jeon, B.D.; Cho, K.Y.; Lee, S.J.; Seo, D. Detecting Faulty Solar Panels Based on Thermal Image Processing. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1–2. [Google Scholar]
- Wickramanayake, S.; Thiyagarajan, K.; Kodagoda, S.; Piyathilaka, L. Ultrasonic Thickness Measuring In-Pipe Robot for Real-Time Non-Destructive Evaluation of Polymeric Spray Linings in Drinking Water Pipe Infrastructure. Mechatronics 2022, 88, 102913. [Google Scholar] [CrossRef]
- Chen, D.; Huang, B.; Kang, F. A Review of Detection Technologies for Underwater Cracks on Concrete Dam Surfaces. Appl. Sci. 2023, 13, 3564. [Google Scholar] [CrossRef]
- Garland, D. Active Acoustic Sensing Technologies for Practical Uav-Based Condition Assessment of Underside Bridge Decks; The University of Vermont and State Agricultural College: Burlington, VT, USA, 2022; ISBN 9798426825734. [Google Scholar]
- Kaur, P.; Dana, K.J.; Romero, F.A.; Gucunski, N. Automated GPR Rebar Analysis for Robotic Bridge Deck Evaluation. IEEE Trans. Cybern. 2015, 46, 2265–2276. [Google Scholar] [CrossRef] [PubMed]
- Yangí, L.; Yang, G.; Liu, Z.; Chang, Y.; Jiang, B.; Awad, Y.; Xiao, J. Wall-Climbing Robot for Visual and GPR Inspection. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1004–1009. [Google Scholar]
- Ulapane, N.; Piyathilaka, L.; Kodagoda, S. Some Convolution and Scale Transformation Techniques to Enhance GPR Images. In Proceedings of the 2019 14th IEEE Conference on Industrial Electronics and Applications (ICIEA), Xi’an, China, 19–21 June 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1453–1458. [Google Scholar]
- Talib, M.A.; Majzoub, S.; Nasir, Q.; Jamal, D. A Systematic Literature Review on Hardware Implementation of Artificial Intelligence Algorithms. J. Supercomput. 2021, 77, 1897–1938. [Google Scholar] [CrossRef]
- Sipola, T.; Alatalo, J.; Kokkonen, T.; Rantonen, M. Artificial Intelligence in the IoT Era: A Review of Edge AI Hardware and Software. In Proceedings of the 2022 31st Conference of Open Innovations Association (FRUCT), Helsinki, Finland, 27 April 2022; IEEE: Helsinki, Finland, 2022; pp. 320–331. [Google Scholar]
- Frasser, C.F.; Linares-Serrano, P.; de los Rios, I.D.; Moran, A.; Skibinsky-Gitlin, E.S.; Font-Rossello, J.; Canals, V.; Roca, M.; Serrano-Gotarredona, T.; Rossello, J.L. Fully Parallel Stochastic Computing Hardware Implementation of Convolutional Neural Networks for Edge Computing Applications. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef] [PubMed]
- Research. V.M. Structural Health Monitoring Market Size USD 6431.52 Million by 2030. Available online: https://www.vantagemarketresearch.com (accessed on 7 August 2023).
- Shibu, M.; Kumar, K.P.; Pillai, V.J.; Murthy, H.; Chandra, S. Structural Health Monitoring Using AI and ML Based Multimodal Sensors Data. Meas. Sens. 2023, 27, 100762. [Google Scholar] [CrossRef]
- Mondal, T.G.; Chen, G. Artificial Intelligence in Civil Infrastructure Health Monitoring—Historical Perspectives, Current Trends, and Future Visions. Front. Built Environ. 2022, 8, 1007886. [Google Scholar] [CrossRef]
- Flah, M.; Nunez, I.; Ben Chaabene, W.; Nehdi, M.L. Machine Learning Algorithms in Civil Structural Health Monitoring: A Systematic Review. Arch. Computat. Methods Eng. 2021, 28, 2621–2643. [Google Scholar] [CrossRef]
- Malekloo, A.; Ozer, E.; AlHamaydeh, M.; Girolami, M. Machine Learning and Structural Health Monitoring Overview with Emerging Technology and High-Dimensional Data Source Highlights. Struct. Health Monit. 2022, 21, 1906–1955. [Google Scholar] [CrossRef]
- Rosafalco, L.; Torzoni, M.; Manzoni, A.; Mariani, S.; Corigliano, A. Online Structural Health Monitoring by Model Order Reduction and Deep Learning Algorithms. Comput. Struct. 2021, 255, 106604. [Google Scholar] [CrossRef]
- Chen, H.; Wong, R.C.-K.; Park, S.; Hugo, R. An AI-Based Monitoring System for External Disturbance Detection and Classification near a Buried Pipeline. Mech. Syst. Signal Process. 2023, 196, 110346. [Google Scholar] [CrossRef]
- Alzughaibi, A.A.; Ibrahim, A.M.; Na, Y.; El-Tawil, S.; Eltawil, A.M. Community-Based Multi-Sensory Structural Health Monitoring System: A Smartphone Accelerometer and Camera Fusion Approach. IEEE Sens. J. 2021, 21, 20539–20551. [Google Scholar] [CrossRef]
- What Is Deep Learning?|IBM. Available online: https://www.ibm.com/topics/deep-learning (accessed on 8 August 2023).
- Azimi, M.; Eslamlou, A.; Pekcan, G. Data-Driven Structural Health Monitoring and Damage Detection through Deep Learning: State-of-the-Art Review. Sensors 2020, 20, 2778. [Google Scholar] [CrossRef] [PubMed]
- Dang, H.V.; Tran-Ngoc, H.; Nguyen, T.V.; Bui-Tien, T.; De Roeck, G.; Nguyen, H.X. Data-Driven Structural Health Monitoring Using Feature Fusion and Hybrid Deep Learning. IEEE Trans. Automat. Sci. Eng. 2021, 18, 2087–2103. [Google Scholar] [CrossRef]
- Seventekidis, P.; Giagopoulos, D. A Combined Finite Element and Hierarchical Deep Learning Approach for Structural Health Monitoring: Test on a Pin-Joint Composite Truss Structure. Mech. Syst. Signal Process. 2021, 157, 107735. [Google Scholar] [CrossRef]
- Kulkarni, N.N.; Raisi, K.; Valente, N.A.; Benoit, J.; Yu, T.; Sabato, A. Deep Learning Augmented Infrared Thermography for Unmanned Aerial Vehicles Structural Health Monitoring of Roadways. Autom. Constr. 2023, 148, 104784. [Google Scholar] [CrossRef]
- Hou, J.; Jiang, H.; Wan, C.; Yi, L.; Gao, S.; Ding, Y.; Xue, S. Deep Learning and Data Augmentation Based Data Imputation for Structural Health Monitoring System in Multi-Sensor Damaged State. Measurement 2022, 196, 111206. [Google Scholar] [CrossRef]
- Liu, C.; Zhang, P.; Xu, X. Literature Review of Digital Twin Technologies for Civil Infrastructure. J. Infrastruct. Intell. Resil. 2023, 2, 100050. [Google Scholar] [CrossRef]
- Bado, M.F.; Tonelli, D.; Poli, F.; Zonta, D.; Casas, J.R. Digital Twin for Civil Engineering Systems: An Exploratory Review for Distributed Sensing Updating. Sensors 2022, 22, 3168. [Google Scholar] [CrossRef] [PubMed]
- Zhong, D.; Xia, Z.; Zhu, Y.; Duan, J. Overview of Predictive Maintenance Based on Digital Twin Technology. Heliyon 2023, 9, e14534. [Google Scholar] [CrossRef]
- Yao, J.-F.; Yang, Y.; Wang, X.-C.; Zhang, X.-P. Systematic Review of Digital Twin Technology and Applications. Vis. Comput. Ind. Biomed. Art 2023, 6, 10. [Google Scholar] [CrossRef]
- Tuhaise, V.V.; Tah, J.H.M.; Abanda, F.H. Technologies for Digital Twin Applications in Construction. Autom. Constr. 2023, 152, 104931. [Google Scholar] [CrossRef]
- Zhou, X.; Sbarufatti, C.; Giglio, M.; Dong, L. A Fuzzy-Set-Based Joint Distribution Adaptation Method for Regression and Its Application to Online Damage Quantification for Structural Digital Twin. Mech. Syst. Signal Process. 2023, 191, 110164. [Google Scholar] [CrossRef]
- Madusanka, N.S.; Fan, Y.; Yang, S.; Xiang, X. Digital Twin in the Maritime Domain: A Review and Emerging Trends. J. Mar. Sci. Eng. 2023, 11, 1021. [Google Scholar] [CrossRef]
- Liu, Y.; Ren, H. Rapid Acquisition Method for Structural Strength Evaluation Stresses of the Ship Digital Twin Model. Ocean Eng. 2023, 285, 115323. [Google Scholar] [CrossRef]
- Leng, J.; Gardoni, P.; Wang, M.; Li, Z.; Królczyk, G.; Feng, S.; Incecik, A.; Li, W. Condition-Based Structural Health Monitoring of Offshore Wind Jacket Structures: Opportunities, Challenges, and Perspectives. Struct. Health Monit. 2023, 22, 147592172211486. [Google Scholar] [CrossRef]
- Teng, S.; Chen, X.; Chen, G.; Cheng, L. Structural Damage Detection Based on Transfer Learning Strategy Using Digital Twins of Bridges. Mech. Syst. Signal Process. 2023, 191, 110160. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, F.; Gao, Y.; Li, T.; Ying, L.; Liang, W.; Li, Y.; Dong, Z. Design of a Digital Twin for Spacecraft Network System. In Proceedings of the 2022 IEEE 5th International Conference on Electronics and Communication Engineering (ICECE), Xi’an, China, 16–18 December 2022; IEEE: Xi’an, China, 2022; pp. 46–50. [Google Scholar]
- Stevens, R. Digital Twin for Spacecraft Concepts. In Proceedings of the 2023 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023; IEEE: Big Sky, MT, USA, 2023; pp. 1–7. [Google Scholar]
- Wang, X.; Bao, C.; Sun, Z.; Wang, X. Research on the Application of Digital Twin in Aerospace Manufacturing Based on 3D Point Cloud. In Proceedings of the 2022 International Conference on Electronics and Devices, Computational Science (ICEDCS), Marseille, France, 20–22 September 2022; IEEE: Marseille, France, 2022; pp. 308–313. [Google Scholar]
- Lai, X.; Yang, L.; He, X.; Pang, Y.; Song, X.; Sun, W. Digital Twin-Based Structural Health Monitoring by Combining Measurement and Computational Data: An Aircraft Wing Example. J. Manuf. Syst. 2023, 69, 76–90. [Google Scholar] [CrossRef]
- Zhao, J.; Chang, K.; Li, S.; Xie, Y. Construction and Application of a Digital Twin-Based Aircraft Landing Gear Management Environment. In Proceedings of the CSAA/IET International Conference on Aircraft Utility Systems (AUS 2022), Nanchang, China, 17–20 August 2022; Institution of Engineering and Technology: Nanchang, China, 2022; pp. 440–443. [Google Scholar]
- Hämäläinen, M. Urban Development with Dynamic Digital Twins in Helsinki City. IET Smart Cities 2021, 3, 201–210. [Google Scholar] [CrossRef]
- Xu, J.; Shu, X.; Qiao, P.; Li, S.; Xu, J. Developing a Digital Twin Model for Monitoring Building Structural Health by Combining a Building Information Model and a Real-Scene 3D Model. Measurement 2023, 217, 112955. [Google Scholar] [CrossRef]
- Dang, H.; Tatipamula, M.; Nguyen, H.X. Cloud-Based Digital Twinning for Structural Health Monitoring Using Deep Learning. IEEE Trans. Ind. Inf. 2022, 18, 3820–3830. [Google Scholar] [CrossRef]
- Vanier, D.J.; Rahman, S. A Primer on Municipal Infrastructure Asset Management; National Research Council: Ottawa, ON, Canada, 2004; Vol. MIIP Client Report B5123.2.
- Neumann, L.A.; Markow, M.J.; Lambert, L.H. Transportation Asset Management: New Guide Advances State of the Practice; TR News Magazine (TR News); Transportation Research Board: Washington, DC, USA, 2003; pp. 8–15. [Google Scholar]
- Too, E.; Betts, M.; Kumar, A. A Strategic Approach to Infrastructure Asset Management; Queensland University of Technology: Brisbane, QLD, Australia, 2006; pp. 163–171. [Google Scholar]
- Federal Highway Administration. Asset Management Primer; Office of Asset Management, U.S. Department of Transportation: Washington, DC, USA, 1999.
- Hastings, N.A.J. Physical Asset Management; Springer: London, UK, 2009; ISBN 978-1-84882-751-6. [Google Scholar]
- Construction Industry Council Definitions of Inspections and Surveys of Buildings; Construction Industry Council: London, UK, 1997.
- Douglas, J. Building Surveys and Reports; John Wiley & Sons: Hoboken, NJ, USA, 2010; ISBN 1-4443-9108-9. [Google Scholar]
- Institute of Public Works Engineering Australia. International Infrastructure Management Manual; Institute of Public Works Engineering Australia: Sydney, Australia, 2006. [Google Scholar]
- Kalutara, P.; Zhang, G.; Setunge, S.; Wakefield, R. Prioritising Sustainability Factors for Australian Community Buildings’ Management Using Analytical Hierarchy Process (AHP). Int. J. Strateg. Prop. Manag. 2018, 22, 37–50. [Google Scholar] [CrossRef]
- Kalutara, P.; Zhang, G.; Setunge, S.; Wakefield, R. Decision-Making Model for Sustainable Management of Australian Community Buildings: Combined Approach Using Analytical Hierarchy Process and Neuro-Fuzzy System. Int. J. Constr. Manag. 2023, 23, 1299–1310. [Google Scholar] [CrossRef]
- Uzarski, D.R.; Grussing, M.N. Building Condition Assessment Metrics: Best Practices; American Society of Civil Engineers (ASCE): Champaign, IL, USA, 2008; ISBN 0-7844-0958-7. [Google Scholar]
- Hovde, P.J.; Moser, K. Performance Based Methods for Service Life Prediction. State of the Art Reports, CIB Report: Publication 294. 2004. Available online: https://www.researchgate.net/profile/Konrad-Moser/publication/305618294_Performance_based_Methods_for_Service_Life_Prediction/links/588eed3692851cef13633e46/Performance-based-Methods-for-Service-Life-Prediction.pdf (accessed on 30 August 2023).
- Morcous, G.; Rivard, H.; Hanna, A. Case-Based Reasoning System for Modeling Infrastructure Deterioration. J. Comput. Civ. Eng. 2002, 16, 104–114. [Google Scholar] [CrossRef]
- Dasu, T.; Johnson, T. Exploratory Data Mining and Data Cleaning; John Wiley & Sons: Hoboken, NJ, USA, 2003; ISBN 0-471-45864-3. [Google Scholar]
- Ortiz-García, J.J.; Costello, S.B.; Snaith, M.S. Derivation of Transition Probability Matrices for Pavement Deterioration Modeling. J. Transp. Eng. 2006, 132, 141–161. [Google Scholar] [CrossRef]
- Kleiner, Y.; Rajani, B. Comprehensive Review of Structural Deterioration of Water Mains: Statistical Models. Urban Water 2001, 3, 131–150. [Google Scholar] [CrossRef]
- Tran, H.D. Investigation of Deterioration Models for Stormwater Pipe Systems. Ph.D. Dissertation, Victoria University, Footscray, VIC, Australia, 2007. [Google Scholar]
- Madanat, S.; Ibrahim, W.H.W. Poisson Regression Models of Infrastructure Transition Probabilities. J. Transp. Eng. 1995, 121, 267–272. [Google Scholar] [CrossRef]
- Baik, H.-S.; Jeong, H.S.; Abraham, D.M. Estimating Transition Probabilities in Markov Chain-Based Deterioration Models for Management of Wastewater Systems. J. Water Resour. Plan. Manag. 2006, 132, 15–24. [Google Scholar] [CrossRef]
- Micevski, T.; Kuczera, G.; Coombes, P. Markov Model for Storm Water Pipe Deterioration. J. Infrastruct. Syst. 2002, 8, 49–56. [Google Scholar] [CrossRef]
- Mohseni, H.; Setunge, S.; Zhang, G.; Wakefield, R. Markov Process for Deterioration Modeling and Asset Management of Community Buildings. J. Constr. Eng. Manag. 2017, 143, 04017003. [Google Scholar] [CrossRef]
- Leung, P.; Tran, L.T. Predicting Shrimp Disease Occurrence: Artificial Neural Networks vs. Logistic Regression. Aquaculture 2000, 187, 35–49. [Google Scholar] [CrossRef]
- Nangnevitsky, M. Artificial Inteligence; Pearson Education Limited: London, UK, 2011; ISBN 978-1-4082-2574-5. [Google Scholar]
- Singh, D.; Tiong, R.L. A Fuzzy Decision Framework for Contractor Selection. J. Constr. Eng. Manag. 2005, 131, 62–70. [Google Scholar] [CrossRef]
- Flintsch, G.W.; Chen, C. Soft Computing Applications in Infrastructure Management. J. Infrastruct. Syst. 2004, 10, 157–166. [Google Scholar] [CrossRef]
- Kleiner, Y.; Sadiq, R.; Rajani, B. Modelling the Deterioration of Buried Infrastructure as a Fuzzy Markov Process. J. Water Supply Res. Technol. —AQUA 2006, 55, 67–80. [Google Scholar] [CrossRef]
- Morcous, G.; Rivard, H.; Hanna, A. Modeling Bridge Deterioration Using Case-Based Reasoning. J. Infrastruct. Syst. 2002, 8, 86–95. [Google Scholar] [CrossRef]
- Zadeh, L.A.; Klir, G.J.; Yuan, B. Fuzzy Sets, Fuzzy Logic, and Fuzzy Systems: Selected Papers; World Scientific: Singapore, 1996; Volume 6, ISBN 981-02-2421-4. [Google Scholar]
- Yen, J. Fuzzy Logic: Intelligence, Control, and Information; Pearson Education India: Noida, India, 1999; ISBN 81-317-0534-X. [Google Scholar]
- Najjaran, H.; Rajani, B.; Sadiq, R. A Fuzzy Expert System for Deterioration Modeling of Buried Metallic Pipes; IEEE: Piscataway, NJ, USA, 2004; Volume 1, pp. 373–378. [Google Scholar]
- Najjaran, H.; Sadiq, R.; Rajani, B. Fuzzy Expert System to Assess Corrosion of Cast/Ductile Iron Pipes from Backfill Properties. Comput.-Aided Civ. Infrastruct. Eng. 2006, 21, 67–77. [Google Scholar] [CrossRef]
- Zhao, Z.; Chen, C. A Fuzzy System for Concrete Bridge Damage Diagnosis. Comput. Struct. 2002, 80, 629–641. [Google Scholar] [CrossRef]
- Geem, Z.W.; Tseng, C.-L.; Kim, J.; Bae, C. Trenchless Water Pipe Condition Assessment Using Artificial Neural Network. In Pipelines 2007: Advances and Experiences with Trenchless Pipeline Projects; ASCE: Reston, VA, USA, 2007; pp. 1–9. [Google Scholar]
- Kamiński, K.; Kamiński, W.; Mizerski, T. Application of Artificial Neural Networks to the Technical Condition Assessment of Water Supply Systems. Ecol. Chem. Eng. 2017, 24, 31. [Google Scholar] [CrossRef]
- Zangenehmadar, Z.; Moselhi, O. Assessment of Remaining Useful Life of Pipelines Using Different Artificial Neural Networks Models. J. Perform. Constr. Facil. 2016, 30, 04016032. [Google Scholar] [CrossRef]
- Huang, Y.-H. Artificial Neural Network Model of Bridge Deterioration. J. Perform. Constr. Facil. 2010, 24, 597–602. [Google Scholar] [CrossRef]
- Lee, J.; Sanmugarasa, K.; Blumenstein, M.; Loo, Y.-C. Improving the Reliability of a Bridge Management System (BMS) Using an ANN-Based Backward Prediction Model (BPM). Autom. Constr. 2008, 17, 758–772. [Google Scholar] [CrossRef]
- Madanat, S. Optimal Infrastructure Management Decisions under Uncertainty. Transp. Res. Part C Emerg. Technol. 1993, 1, 77–88. [Google Scholar] [CrossRef]
- Baker, D.; Bridges, D.; Hunter, R.; Johnson, G.; Krupa, J.; Murphy, J.; Sorenson, K. Guidebook to Decision-Making Methods; Westinghouse Savannah River Company: Aiken, SC, USA, 2001. [Google Scholar]
- Zahedi, F. The Analytic Hierarchy Process—A Survey of the Method and Its Applications. Interfaces 1986, 16, 96–108. [Google Scholar] [CrossRef]
- Kalutara, P.; Zhang, G.; Setunge, S.; Wakefield, R. Factors That Influence Australian Community Buildings’ Sustainable Management. Eng. Constr. Archit. Manag. 2017, 24, 94–117. [Google Scholar] [CrossRef]
- Kalutara, P. Development of an Integrated Decision-Making Model for the Sustainable Management of Community Buildings in Australia. Ph.D. Dissertation, RMIT University, Melbourne, VIC, Australia, 2013. [Google Scholar]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Pulse Velocity (km/s) | Quality of Concrete |
|---|---|
| >4.5 | Excellent |
| 3.5–4.5 | Good |
| 3.0–3.5 | Medium |
| <3.0 | Poor |
| Sensor Function | Materials/Construction | Measurement Mechanism | Output Parameter(s) | Applications | Ref |
|---|---|---|---|---|---|
| Impact Sensor | PZT/standard PZT sensor | LRC | Voltage (amplitude) | Aerospace SHM | [33] |
| Crack Detector | Dielectric material/Cylinder | Reflection Coefficient and spectrum shift | S11 | Surface crack detection on metallic structures | [35] |
| Strain Sensor | Cu printed on Flexible substrate/Double layer flat coils on a magnetostrictive layer | Guided wave | Voltage (amplitude) | Defect detection in metallic planar structures | [42] |
| Crack Detector | PZT/standard PZT sensor | LRC | Voltage (amplitude, and phase) | Surface crack detection on metallic structures | [34] |
| Crack Detector | UHF Antenna | Reflection Coefficient and spectrum shift | S11 | Surface crack detection on metallic structures | [36] |
| Strain Sensor | PDMS/IDT | Capacitance | Capacitance, Frequency | Strain measurement on surfaces | [39] |
| Strain Sensor | Standard strain gauge | Resistance | Voltage | Strain measurement on surfaces | [40] |
| Strain Sensor | PVDF/IDT metal deposited on PVDF | Capacitance | Capacitance | strain measurement on surfaces | [41] |
| Crack Detector | Taconic TLX-0/circular antenna and Meandered transmission line | Reflection Coefficient and spectrum shift, Time domain reflectometry | S11, Voltage amplitude | Surface crack detection on metallic structures | [37] |
| Crack Detector | PZT/standard PSI-5H4E sensor | Impedance | Magnitude, phase angle | Surface crack detection of structures | [44] |
| Strain Sensor | FR4/printed rectangular microstrip antenna | Reflection Coefficient and spectrum shift | S11 | Strain measurement on surfaces | [38] |
| MEMS Sensor Domain | Application |
|---|---|
| Acceleration/vibration/Sound/Strain/Stress/Load |
|
| Temperature |
|
| Moisture |
|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Preethichandra, D.M.G.; Suntharavadivel, T.G.; Kalutara, P.; Piyathilaka, L.; Izhar, U. Influence of Smart Sensors on Structural Health Monitoring Systems and Future Asset Management Practices. Sensors 2023, 23, 8279. https://doi.org/10.3390/s23198279
Preethichandra DMG, Suntharavadivel TG, Kalutara P, Piyathilaka L, Izhar U. Influence of Smart Sensors on Structural Health Monitoring Systems and Future Asset Management Practices. Sensors. 2023; 23(19):8279. https://doi.org/10.3390/s23198279
Chicago/Turabian StylePreethichandra, D. M. G., T. G. Suntharavadivel, Pushpitha Kalutara, Lasitha Piyathilaka, and Umer Izhar. 2023. "Influence of Smart Sensors on Structural Health Monitoring Systems and Future Asset Management Practices" Sensors 23, no. 19: 8279. https://doi.org/10.3390/s23198279
APA StylePreethichandra, D. M. G., Suntharavadivel, T. G., Kalutara, P., Piyathilaka, L., & Izhar, U. (2023). Influence of Smart Sensors on Structural Health Monitoring Systems and Future Asset Management Practices. Sensors, 23(19), 8279. https://doi.org/10.3390/s23198279