Research on Estimating Rice Canopy Height and LAI Based on LiDAR Data

Abstract
:1. Introduction
2. Materials and Methods
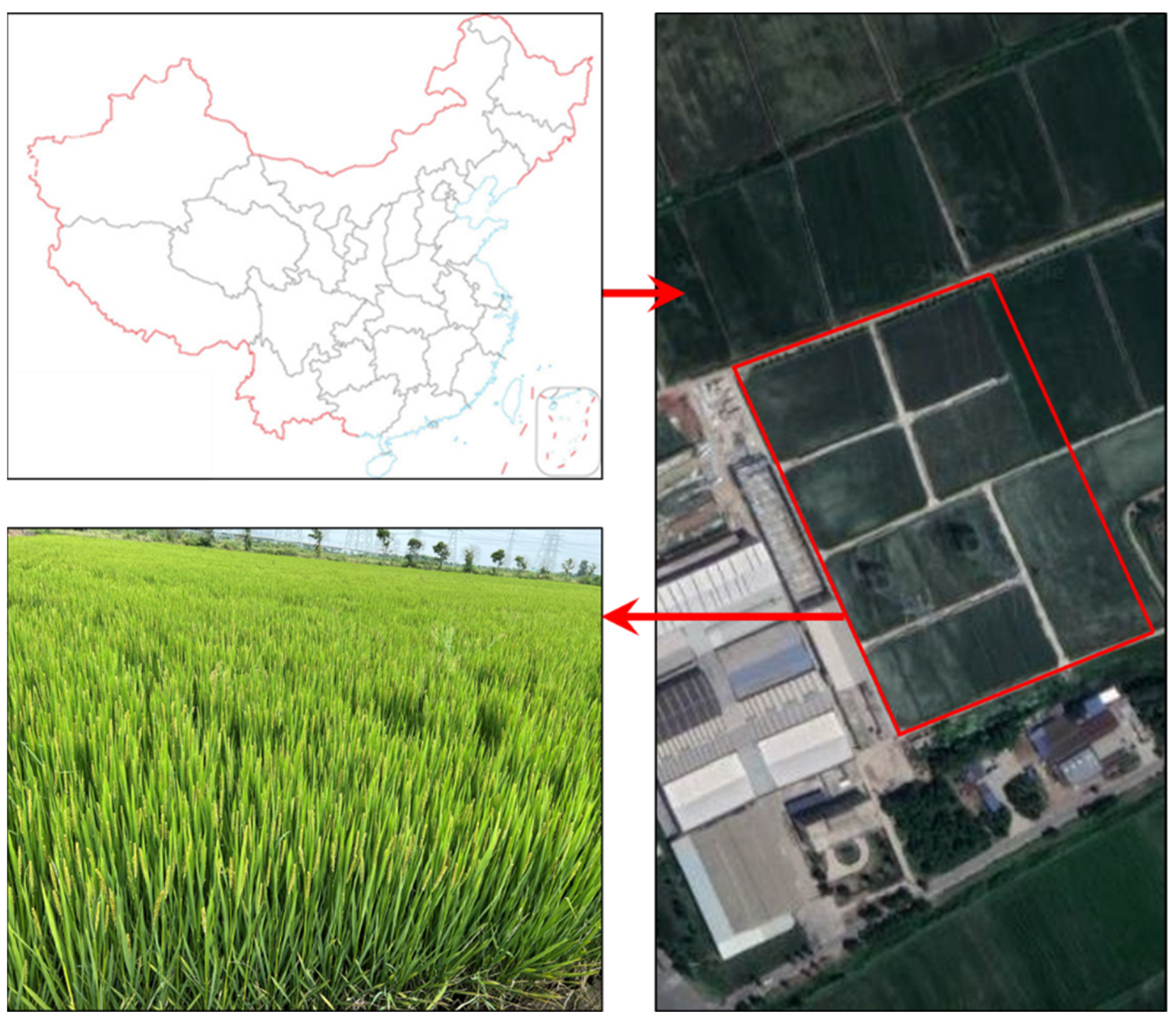
2.1. Plant Materials
2.2. System Architecture
2.3. Field Setup and Data Acquisition
2.4. Ground-Truth Data Collection
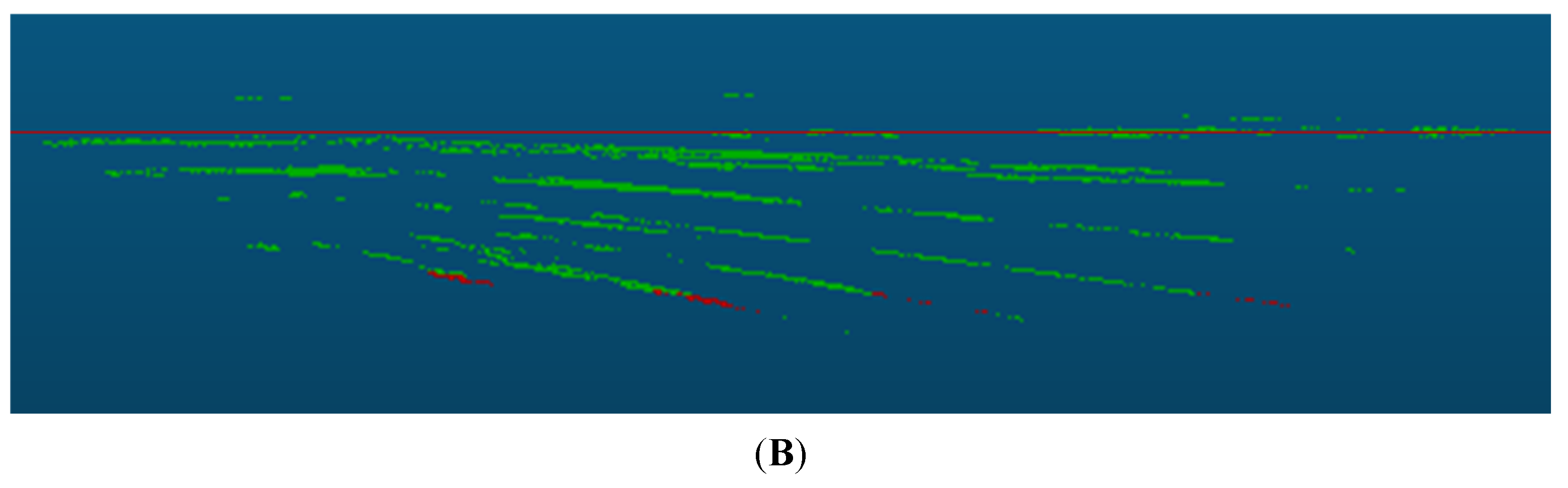
2.5. Raw Data
2.6. Data Preprocessing
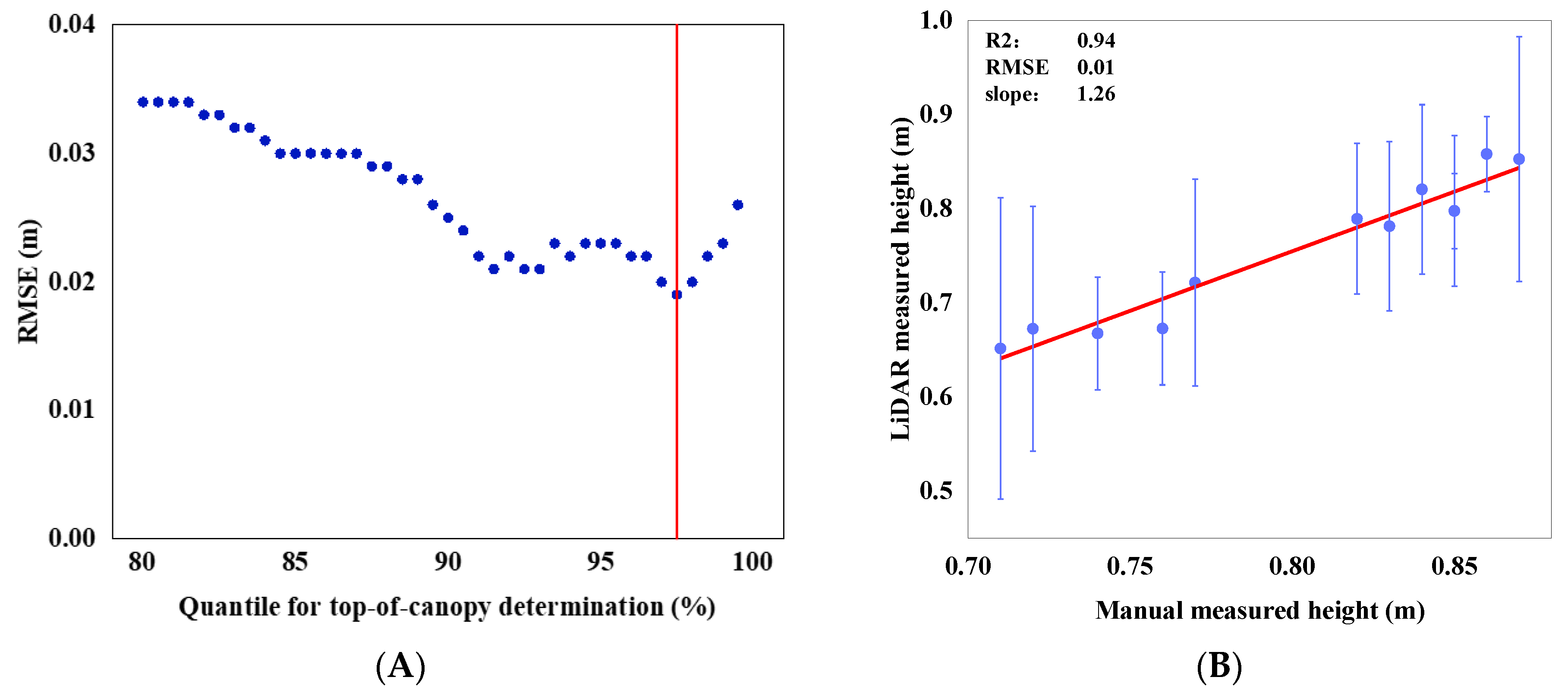
2.6.1. Rice Canopy Height Calculation
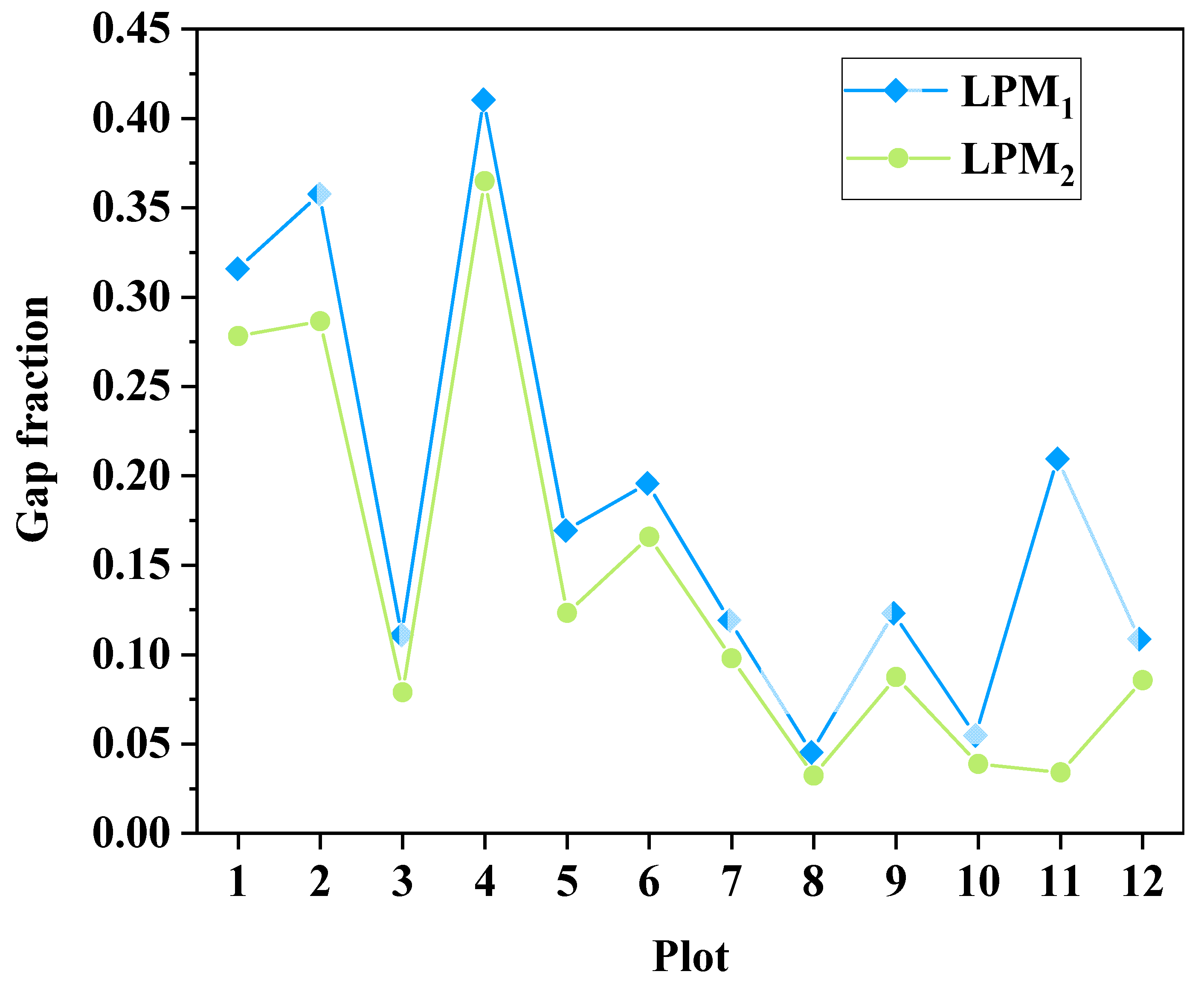
2.6.2. Rice Canopy LAI Estimation
3. Results and Discussion
3.1. Rice Canopy Height Estimation and Accuracy Assessment
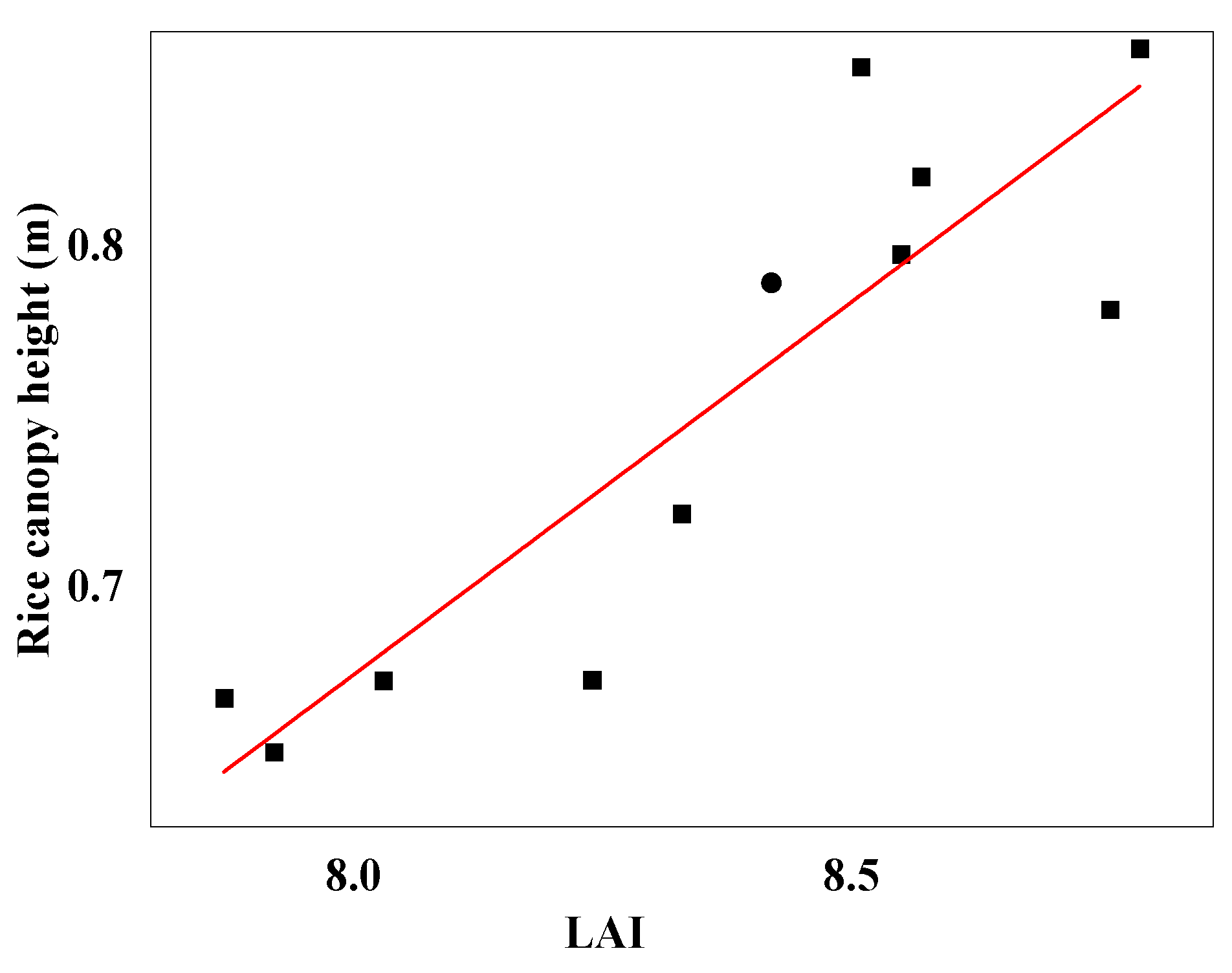
3.2. LAI Estimation Using LiDAR Data
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mohanty, S.; Wassmann, R.; Nelson, A.; Moya, P.; Jagadish, S.V.K. Rice and Climate Change: Significance for Food Security and Vulnerability; International Rice Research Institute: Los Baños, Philippines, 2013; Volume 14, pp. 1–14. [Google Scholar]
- Elert, E. Rice by the numbers: A good grain. Nature 2014, 514, S50–S51. [Google Scholar] [CrossRef]
- Da Silva, A.; Sinfort, C.; Tinet, C.; Pierrat, D.; Huberson, S. A Lagrangian model for spray behaviour within vine canopies. J. Aerosol Sci. 2006, 37, 658–674. [Google Scholar] [CrossRef]
- Farooq, M.; Salyani, M. Modeling of spray penetration and deposition on citrus tree canopies. Trans. ASAE 2004, 47, 619–627. [Google Scholar] [CrossRef]
- Gaskin, R.; Manktelow, D.; Cook, S.; May, W.; Van_Leeuwen, R. Effects of canopy density on spray deposition in kiwifruit. N. Z. Plant Prot. 2013, 66, 194–198. [Google Scholar] [CrossRef]
- Yang, X.H.; Wang, F.M.; Huang, J.F.; Wang, J.W.; Wang, R.C.; Shen, Z.Q.; Wang, X.Z. Comparison between radial basis function neural network and regression model for estimation of rice biophysical parameters using remote sensing. Pedosphere 2009, 19, 176–188. [Google Scholar] [CrossRef]
- Zheng, G.; Moskal, L.M. Retrieving Leaf Area Index (LAI) Using Remote Sensing: Theories, Methods and Sensors. Sensors 2009, 9, 2719–2745. [Google Scholar]
- Xiao, X.; He, L.; Salas, W.; Li, C.; Moore, B.; Zhao, R.; Frolking, S.; Boles, S. Quantitative relationships between field-measured leaf area index and vegetation index derived from VEGETATION images for paddy rice fields. Int. J. Remote Sens. 2002, 23, 3595–3604. [Google Scholar] [CrossRef]
- Yang, Y.J.; Tian, Q.J. Using hyperspectral data for rice LAI estimation at different phenological periods. In Proceedings of the AOPC 2015: Advanced Display Technology; and Micro/Nano Optical Imaging Technologies and Applications, Beijing, China, 5–7 May 2015; SPIE: Bellingham, WA, USA, 2015; Volume 9672, pp. 132–139. [Google Scholar]
- Zhang, Y.; Yu, C.; Lin, J.; Liu, J.; Liu, B.; Wang, J.; Huang, A.; Li, H.; Zhao, T. OsMPH1 regulates plant height and improves grain yield in rice. PLoS ONE 2017, 12, e0180825. [Google Scholar] [CrossRef]
- Confalonieri, R.; Bregaglio, S.; Rosenmund, A.S.; Acutis, M.; Savin, I. A model for simulating the height of rice plants. Eur. J. Agron. 2011, 34, 20–25. [Google Scholar] [CrossRef]
- Fukuda, S.; Koba, K.; Okamura, M.; Watanabe, Y.; Hosoi, J.; Nakagomi, K.; Maeda, H.; Kondo, M.; Sugiura, D. Novel technique for non-destructive LAI estimation by continuous measurement of NIR and PAR in rice canopy. Field Crop. Res. 2021, 263, 108070. [Google Scholar] [CrossRef]
- Yuan, Y.; Wang, X.; Yin, F.; Zhan, J. Examination of the Quantitative Relationship between Vegetation Canopy Height and LAI. Adv. Meteorol. 2013, 2013, 964323. [Google Scholar] [CrossRef]
- Luo, S.; Wang, C.; Pan, F.; Xi, X.; Li, G.; Nie, S.; Xia, S. Estimation of wetland vegetation height and leaf area index using airborne laser scanning data. Ecol. Indic. 2015, 48, 550–559. [Google Scholar] [CrossRef]
- Raj, R.; Walker, J.P.; Pingale, R.; Nandan, R.; Naik, B.; Jagarlapudi, A. Leaf area index estimation using top-of-canopy airborne RGB images. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102282. [Google Scholar] [CrossRef]
- Maghsoudi, H.; Minaei, S.; Ghobadian, B.; Masoudi, H. Ultrasonic sensing of pistachio canopy for low-volume precision spraying. Comput. Electron. Agric. 2015, 112, 149–160. [Google Scholar] [CrossRef]
- Zaman-Allah, M.; Vergara, O.; Araus, J.L.; Tarekegne, A.; Magorokosho, C.; Zarco-Tejada, P.J.; Hornero, A.; Albà, A.H.; Das, B.; Craufurd, P.; et al. Unmanned aerial platform-based multi-spectral imaging for field phenotyping of maize. Plant Methods 2015, 11, 35. [Google Scholar] [CrossRef] [PubMed]
- Sun, S.; Li, C. In-field high throughput phenotyping and phenotype data analysis for cotton plant growth using LiDAR. In Proceedings of the 2017 ASABE Annual International Meeting, Spokane, DC, USA, 16–19 July 2017; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2017; p. 1. [Google Scholar]
- Jin, X.; Zarco-Tejada, P.J.; Schmidhalter, U.; Reynolds, M.P.; Hawkesford, M.J.; Varshney, R.K.; Yang, T.; Nie, C.; Li, Z.; Ming, B.; et al. High-Throughput Estimation of Crop Traits: A Review of Ground and Aerial Phenotyping Platforms. IEEE Geosci. Remote Sens. Mag. 2020, 9, 200–231. [Google Scholar] [CrossRef]
- Bao, Y.; Tang, L.; Srinivasan, S.; Schnable, P.S. Field-based architectural traits characterisation of maize plant using time-of-flight 3D imaging. Biosyst. Eng. 2019, 178, 86–101. [Google Scholar] [CrossRef]
- Li, L.; Zhang, Q.; Huang, D. A Review of Imaging Techniques for Plant Phenotyping. Sensors 2014, 14, 20078–20111. [Google Scholar]
- Su, Y.; Guo, Q.; Collins, B.M.; Fry, D.L.; Hu, T.; Kelly, M. Forest fuel treatment detection using multi-temporal airborne lidar data and high-resolution aerial imagery: A case study in the Sierra Nevada Mountains, California. Int. J. Remote Sens. 2016, 37, 3322–3345. [Google Scholar] [CrossRef]
- Toda, L.L.; Yokingco JC, E.; Paringit, E.C.; Lasco, R.D. A LiDAR-based flood modelling approach for mapping rice cultivation areas in Apalit, Pampanga. Appl. Geogr. 2017, 80, 34–47. [Google Scholar] [CrossRef]
- Sun, S.; Li, C.; Paterson, A.H.; Jiang, Y.; Xu, R.; Robertson, J.S.; Snider, J.L.; Chee, P.W. In-field High Throughput Phenotyping and Cotton Plant Growth Analysis Using LiDAR. Front. Plant Sci. 2018, 9, 16. [Google Scholar] [CrossRef] [PubMed]
- Friedli, M.; Kirchgessner, N.; Grieder, C.; Liebisch, F.; Mannale, M.; Walter, A. Terrestrial 3D laser scanning to track the increase in canopy height of both monocot and dicot crop species under field conditions. Plant Methods 2016, 12, 9. [Google Scholar] [CrossRef] [PubMed]
- Su, Y.; Wu, F.; Ao, Z.; Jin, S.; Qin, F.; Liu, B.; Pang, S.; Liu, L.; Guo, Q. Evaluating maize phenotype dynamics under drought stress using terrestrial lidar. Plant Methods 2019, 15, 11. [Google Scholar] [CrossRef] [PubMed]
- Estornell, J.; Hadas, E.; Martí, J.; López-Cortés, I. Tree extraction and estimation of walnut structure parameters using airborne LiDAR data. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102273. [Google Scholar] [CrossRef]
- Jimenez-Berni, J.A.; Deery, D.M.; Rozas-Larraondo, P.; Condon, A.T.G.; Rebetzke, G.J.; James, R.A.; Bovill, W.D.; Furbank, R.T.; Sirault, X.R.R. High throughput determination of plant height, ground cover, and above-ground biomass in wheat with LiDAR. Front. Plant Sci. 2018, 9, 237. [Google Scholar] [CrossRef]
- Wang, Y.; Fang, H. Estimation of LAI with the LiDAR Technology: A Review. Remote Sens. 2020, 12, 3457. [Google Scholar] [CrossRef]
- Zhao, K.; Popescu, S. Lidar-based mapping of leaf area index and its use for validating GLOBCARBON satellite LAI product in a temperate forest of the southern USA. Remote Sens. Environ. 2009, 113, 1628–1645. [Google Scholar] [CrossRef]
- Luo, S.; Chen, J.M.; Wang, C.; Gonsamo, A.; Xi, X.; Lin, Y.; Qian, M.; Peng, D.; Nie, S.; Qin, H. Comparative Performances of Airborne LiDAR Height and Intensity Data for Leaf Area Index Estimation. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 11, 300–310. [Google Scholar] [CrossRef]
- Sadro, S.; Gastil-Buhl, M.; Melack, J. Characterizing patterns of plant distribution in a southern California salt marsh using remotely sensed topographic and hyperspectral data and local tidal fluctuations. Remote Sens. Environ. 2007, 110, 226–239. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Indicator | Value |
|---|---|
| Laser Beams | 16 |
| Range | 20 cm~150 m |
| Range Resolution | +/−2 cm |
| Scan FOV | 30° × 360° |
| Vertical Angle Resolution | 2° |
| Rotation Rate | 300/600/1200 (r/min) |
| Laser Wavelength | 905 nm |
| Size | 109 mm (diameter) × 82.7 mm (height) |
| Working Temperature | −10 °C~+ 60 °C |
| Weight | 0.84 kg |
| Indicator | Value |
|---|---|
| Size (mm) | 3430 (length) × 1750 (width) × 2360 (height) |
| Track Width (mm) | 1540 |
| Minimum Ground Clearance (mm) | 1055 |
| Quality (kg) | 880 |
| Engine Power Rating (KW/rpm) | 17.1/3600 |
| Travel Speed (km/h) | 0–11 |
| Battery | 12 V 45 Ah |
| Plot | Average Rice Canopy Height (m) | |||
|---|---|---|---|---|
| Manually Measured | Std | Measured with LiDAR | Error (%) | |
| 1 | 0.72 | 0.13 | 0.67242 | 7.08 |
| 2 | 0.74 | 0.06 | 0.66734 | 10.89 |
| 3 | 0.83 | 0.09 | 0.78127 | 6.24 |
| 4 | 0.76 | 0.06 | 0.67266 | 12.98 |
| 5 | 0.85 | 0.04 | 0.79745 | 6.59 |
| 6 | 0.77 | 0.11 | 0.7214 | 6.74 |
| 7 | 0.84 | 0.09 | 0.8204 | 2.39 |
| 8 | 0.85 | 0.08 | 0.79758 | 6.57 |
| 9 | 0.86 | 0.04 | 0.85796 | 0.24 |
| 10 | 0.82 | 0.08 | 0.78918 | 3.91 |
| 11 | 0.87 | 0.13 | 0.85257 | 2.04 |
| 12 | 0.71 | 0.16 | 0.65143 | 8.99 |
| Plot | LAI of Rice (m2·m−2) | |||
|---|---|---|---|---|
| Measurement | Std | LPM1 | LPM2 | |
| 1 | 0.803 | 0.085 | 0.315385 | 0.278176 |
| 2 | 0.787 | 0.069 | 0.357357 | 0.286521 |
| 3 | 0.876 | 0.097 | 0.109817 | 0.078993 |
| 4 | 0.824 | 0.039 | 0.410256 | 0.364966 |
| 5 | 0.855 | 0.106 | 0.168514 | 0.123336 |
| 6 | 0.833 | 0.081 | 0.194831 | 0.165871 |
| 7 | 0.857 | 0.045 | 0.117978 | 0.0979711 |
| 8 | 0.855 | 0.093 | 0.0438413 | 0.0323046 |
| 9 | 0.879 | 0.104 | 0.121986 | 0.0874539 |
| 10 | 0.842 | 0.065 | 0.0533563 | 0.0388916 |
| 11 | 0.851 | 0.058 | 0.208683 | 0.0341212 |
| 12 | 0.792 | 0.046 | 0.107438 | 0.0856531 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jing, L.; Wei, X.; Song, Q.; Wang, F. Research on Estimating Rice Canopy Height and LAI Based on LiDAR Data. Sensors 2023, 23, 8334. https://doi.org/10.3390/s23198334
Jing L, Wei X, Song Q, Wang F. Research on Estimating Rice Canopy Height and LAI Based on LiDAR Data. Sensors. 2023; 23(19):8334. https://doi.org/10.3390/s23198334
Chicago/Turabian StyleJing, Linlong, Xinhua Wei, Qi Song, and Fei Wang. 2023. "Research on Estimating Rice Canopy Height and LAI Based on LiDAR Data" Sensors 23, no. 19: 8334. https://doi.org/10.3390/s23198334
APA StyleJing, L., Wei, X., Song, Q., & Wang, F. (2023). Research on Estimating Rice Canopy Height and LAI Based on LiDAR Data. Sensors, 23(19), 8334. https://doi.org/10.3390/s23198334