
Study of Pressure Distribution in Floor Tiles with Printed P(VDF:TrFE) Sensors for Smart Surface Applications

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Materials and Methods
2.1. Fabrication of Smart Floor Tile
- Conductive polymer layer out of poly(3,4-ethylenedioxythiophene) polystyrene sulfonate (PEDOT:PSS) (CleviosTM SV4 Stab, Heraeus Deutschland GmbH & Co. KG, Hanau, Germany) acting as the bottom electrode (100–35);
- 2.
- P(VDF:TrFE)80:20 ink (Piezotech® FC20, Piezotech Arkema, Pierre-Benite Cedex, France) as ferroelectric material (24–150);
- 3.
- Another layer of PEDOT:PSS for the top electrode (100–35);
- 4.
- Connection lines with silver ink (Bectron CP6611) (59–32);
- 5.
- Protection layer (UVLM 2, Marabu GmbH & Co. KG, Tamm, Germany) (150–31).
2.2. Material Characterization
2.3. Floor Testing
2.4. Finite Element Model
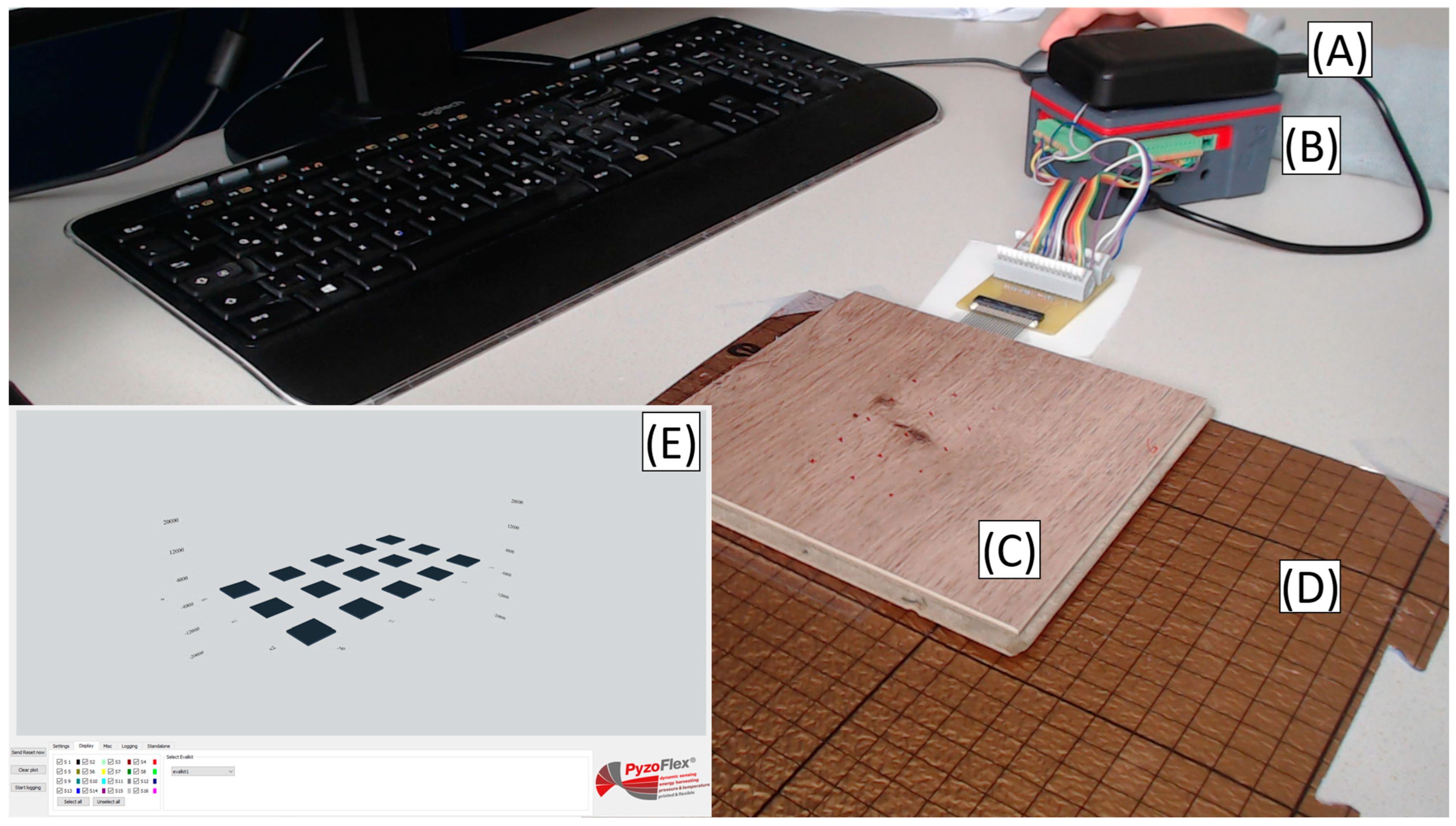
2.5. Data Acquisition Unit
3. Results and Discussion
3.1. Mechanical and Electrical Properties
3.2. Smart Floor Testing and Modeling
3.3. Smart Floor Demonstration
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Zeid, A.; Sundaram, S.; Moghaddam, M.; Kamarthi, S.; Marion, T. Interoperability in Smart Manufacturing: Research Challenges. Machines 2019, 7, 21. [Google Scholar] [CrossRef] [Green Version]
- Stein, N.; Meller, J.; Flath, C.M. Big Data on the Shop-Floor: Sensor-Based Decision-Support for Manual Processes. J. Bus. Econ. 2018, 88, 593–616. [Google Scholar] [CrossRef]
- Haraburda, K.; Czygier, J.; Recko, M. Smart Floor for a More Comfortable and Safer Life. In Proceedings of the 2019 International Young Engineers Forum, YEF-ECE 2019, Costa da Caparica, Portugal, 10 May 2019; pp. 32–35. [Google Scholar] [CrossRef]
- Holzinger, A.; Röcker, C.; Ziefle, M. From Smart Health to Smart Hospitals. In Smart Health; Holzinger, A., Röcker, C., Ziefle, M., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2015; Volume 8700, pp. 1–20. ISBN 978-3-319-16225-6. [Google Scholar]
- Qian, G.; Zhang, J.; Kidane, A. People Identification Using Floor Pressure Sensing and Analysis. IEEE Sens. J. 2010, 10, 1447–1460. [Google Scholar] [CrossRef]
- Jawahar, M.; Gruteser, M.; Howard, R. Kicking Yourself Awake: Towards Self-Powering Mats for Room-Level Localization and Occupancy Detection. In Proceedings of the HotMobile 2021, 22nd International Workshop on Mobile Computing Systems and Applications, Online, 24–26 February 2021; pp. 125–131. [Google Scholar] [CrossRef]
- Stadlober, B.; Zirkl, M.; Irimia-Vladu, M. Route towards Sustainable Smart Sensors: Ferroelectric Polyvinylidene Fluoride-Based Materials and Their Integration in Flexible Electronics. Chem. Soc. Rev. 2019, 48, 1787–1825. [Google Scholar] [CrossRef] [PubMed]
- Thorwartl, C.; Kröll, J.; Tschepp, A.; Schäffner, P.; Holzer, H.; Stöggl, T. A Novel Sensor Foil to Measure Ski Deflections: Development and Validation of a Curvature Model. Sensors 2021, 21, 4848. [Google Scholar] [CrossRef] [PubMed]
- Thorwartl, C.; Kröll, J.; Tschepp, A.; Holzer, H.; Teufl, W.; Stöggl, T. Validation of a Sensor-Based Dynamic Ski Deflection Measurement in the Lab and Proof-of-Concept Field Investigation. Sensors 2022, 22, 5768. [Google Scholar] [CrossRef] [PubMed]
- Shi, Q.; Zhang, Z.; He, T.; Sun, Z.; Wang, B.; Feng, Y.; Shan, X.; Salam, B.; Lee, C. Deep Learning Enabled Smart Mats as a Scalable Floor Monitoring System. Nat. Commun. 2020, 11, 4609. [Google Scholar] [CrossRef]
- Minvielle, L.; Atiq, M.; Serra, R.; Mougeot, M.; Vayatis, N. Fall Detection Using Smart Floor Sensor and Supervised Learning. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, EMBS 2017, Jeju, Korea, 11–15 July 2017; pp. 3445–3448. [Google Scholar] [CrossRef]
- Stevenson, J.P.; Firebaugh, S.L.; Charles, H.K. Biometric Identification from a Floor Based PVDF Sensor Array Using Hidden Markov Models. In Proceedings of the Sensors Applications Symposium Technology Conference, San Diego, CA, USA, 6–8 February 2007. [Google Scholar]
- Middleton, L.; Buss, A.A.; Bazin, A.; Nixon, M.S. A Floor Sensor System for Gait Recognition. In Proceedings of the Fourth IEEE Workshop on Automatic Identification Advanced Technologies, AUTO ID 2005, Buffalo, NY, USA, 17–18 October 2005; pp. 171–180. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Topac, T.; Smith, W.; Ladpli, P.; Liu, C.; Chang, F.K. Characterization of Distributed Microfabricated Strain Gauges on Stretchable Sensor Networks for Structural Applications. Sensors 2018, 18, 3260. [Google Scholar] [CrossRef] [Green Version]
- Cheng, X.; Song, Y.; Han, M.; Meng, B.; Su, Z.; Miao, L.; Zhang, H. A Flexible Large-Area Triboelectric Generator by Low-Cost Roll-to-Roll Process for Location-Based Monitoring. Sens. Actuators A Phys. 2016, 247, 206–214. [Google Scholar] [CrossRef]
- Serra, R.; Di Croce, P.; Peres, R.; Knittel, D. Human Step Detection from a Piezoelectric Polymer Floor Sensor Using Normalization Algorithms. In Proceedings of the 2014 IEEE SENSORS, Valencia, Spain, 2–5 November 2014; pp. 1169–1172. [Google Scholar]
- Hoffmann, R.; Brodowski, H.; Steinhage, A.; Grzegorzek, M. Detecting Walking Challenges in Gait Patterns Using a Capacitive Sensor Floor and Recurrent Neural Networks. Sensors 2021, 21, 1086. [Google Scholar] [CrossRef]
- Jeon, S.-B.; Nho, Y.-H.; Park, S.-J.; Kim, W.-G.; Tcho, I.-W.; Kim, D.; Kwon, D.-S.; Choi, Y.-K. Self-Powered Fall Detection System Using Pressure Sensing Triboelectric Nanogenerators. Nano Energy 2017, 41, 139–147. [Google Scholar] [CrossRef]
- Ma, J.; Jie, Y.; Bian, J.; Li, T.; Cao, X.; Wang, N. From Triboelectric Nanogenerator to Self-Powered Smart Floor: A Minimalist Design. Nano Energy 2017, 39, 192–199. [Google Scholar] [CrossRef]
- He, C.; Zhu, W.; Chen, B.; Xu, L.; Jiang, T.; Han, C.B.; Gu, G.Q.; Li, D.; Wang, Z.L. Smart Floor with Integrated Triboelectric Nanogenerator As Energy Harvester and Motion Sensor. ACS Appl. Mater. Interfaces 2017, 9, 26126–26133. [Google Scholar] [CrossRef]
- Niu, S.; Wang, Z.L. Theoretical Systems of Triboelectric Nanogenerators. Nano Energy 2014, 14, 161–192. [Google Scholar] [CrossRef] [Green Version]
- Pathak, M.; Kumar, R. Synchronous Inductor Switched Energy Extraction Circuits for Triboelectric Nanogenerator. IEEE Access 2021, 9, 76938–76954. [Google Scholar] [CrossRef]
- Kim, K.-B.; Cho, J.Y.; Jabbar, H.; Ahn, J.H.; Hong, S.D.; Woo, S.B.; Sung, T.H. Optimized Composite Piezoelectric Energy Harvesting Floor Tile for Smart Home Energy Management. Energy Convers. Manag. 2018, 171, 31–37. [Google Scholar] [CrossRef]
- Puscasu, O.; Counsell, N.; Herfatmanesh, M.R.; Peace, R.; Patsavellas, J.; Day, R. Powering Lights with Piezoelectric Energy-Harvesting Floors. Energy Technol. 2018, 6, 906–916. [Google Scholar] [CrossRef] [Green Version]
- Sekine, T.; Sugano, R.; Tashiro, T.; Sato, J.; Takeda, Y.; Matsui, H.; Kumaki, D.; Domingues Dos Santos, F.; Miyabo, A.; Tokito, S. Fully Printed Wearable Vital Sensor for Human Pulse Rate Monitoring Using Ferroelectric Polymer. Sci. Rep. 2018, 8, 4442. [Google Scholar] [CrossRef] [Green Version]
- Khan, S.; Lorenzelli, L.; Dahiya, R.S. Technologies for Printing Sensors and Electronics over Large Flexible Substrates: A Review. IEEE Sens. J. 2015, 15, 3164–3185. [Google Scholar] [CrossRef]
- Groß-Vogt, K.; Svoronos-Kanavas, I.; Weger, M.; Amon, C. The Augmented Floor-Assessing Auditory Augmentation. In Proceedings of the 17th International Audio Mostly Conference, St. Pölten, Austria, 6–9 September 2022. [Google Scholar]
- Zirkl, M.; Scheipl, G.; Stadlober, B.; Hartmann, P.; Haller, M.; Rendl, C.; Greindl, P. PyzoFlex: A Printed Piezoelectric Pressure Sensing Foil for Human Machine Interfaces. In Organic Field-Effect Transistors XII; and Organic Semiconductors in Sensors and Bioelectronics, VI; Bao, Z., McCulloch, I., Shinar, R., Kymissis, I., Eds.; SPIE: Bellingham, WA, USA, 2013; Volume 8831, pp. 134–141. [Google Scholar]
- Zirkl, M.; Stadlober, B.; Leising, G. Synthesis of Ferroelectric Poly(Vinylidene Fluoride) Copolymer Films and Their Application in Integrated Full Organic Pyroelectric Sensors. Ferroelectrics 2007, 353, 173–185. [Google Scholar] [CrossRef]
- Fares, H.; Seminara, L.; Pinna, L.; Valle, M.; Groten, J.; Hammer, M.; Zirkl, M.; Stadlober, B. Screen Printed Tactile Sensing Arrays for Prosthetic Applications. In Proceedings of the IEEE International Symposium on Circuits and Systems, Florence, Italy, 27–30 May 2018. [Google Scholar] [CrossRef]
- Crow Polymer Database. 2022. Available online: https://polymerdatabase.com/polymer%20physics/Poisson%20Table.html (accessed on 2 December 2022).
- Schäffner, P.; Zirkl, M.; Schider, G.; Groten, J.; Belegratis, M.R.; Knoll, P.; Stadlober, B. Microstructured Single-Layer Electrodes Embedded in P(VDF-TrFE) for Flexible and Self-Powered Direction-Sensitive Strain Sensors. Smart Mater. Struct. 2020, 29, 085040. [Google Scholar] [CrossRef]
- Rabe, K.M.; Dawber, M.; Lichtensteiger, C.; Ahn, C.H.; Triscone, J.-M. Modern Physics of Ferroelectrics: Essential Background. In Physics of Ferroelectrics; Springer: Berlin/Heidelberg, Germany, 2007; Volume 105, pp. 1–30. ISBN 3-540-34590-6. [Google Scholar]
- Furukawa, T. Piezoelectricity and Pyroelectricity in Polymers. IEEE Trans. Electr. Insul. 1989, 24, 375–394. [Google Scholar] [CrossRef]
- Schäffner, P. Study of Microstructuring Effects in P(VDF-TrFE)-Based Transducers for Sensing and Energy Harvesting; University of Graz: Graz, Austria, 2021. [Google Scholar]
- Popov, V.L.; Heß, M.; Willert, E. Handbook of Contact Mechanics; Springer: Berlin/Heidelberg, Germany, 2019; ISBN 978-3-662-58708-9. [Google Scholar]
- Hafner, J.; Benaglia, S.; Richheimer, F.; Teuschel, M.; Maier, F.J.; Werner, A.; Wood, S.; Platz, D.; Schneider, M.; Hradil, K.; et al. Multi-scale characterisation of a ferroelectric polymer reveals the emergence of a morphological phase transition driven by temperature. Nat. Commun. 2021, 12, 152. [Google Scholar] [CrossRef] [PubMed]
- PyzoFlex® Datasheet. Available online: https://www.pyzoflex.com/downloads (accessed on 23 December 2022).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Floor Tile | PET Substrate | Piezoelectric Layer P(VDF:TrFE) |
|---|---|---|---|
| Thickness t | 8 mm | 175 µm | 3.8 µm |
| Young’s modulus Y | 2.6 GPa (isotropic) | Yl = 4.8 GPa; Yt = 4.0 GPa (orthotropic) | Yl = 1 GPa; Yt = 2.2 GPa (orthotropic) |
| Poisson’s ratio ν | 0.4 | 0.4 [31] | 0.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alvarez Rueda, A.; Schäffner, P.; Petritz, A.; Groten, J.; Tschepp, A.; Petersen, F.; Zirkl, M.; Stadlober, B. Study of Pressure Distribution in Floor Tiles with Printed P(VDF:TrFE) Sensors for Smart Surface Applications. Sensors 2023, 23, 603. https://doi.org/10.3390/s23020603
Alvarez Rueda A, Schäffner P, Petritz A, Groten J, Tschepp A, Petersen F, Zirkl M, Stadlober B. Study of Pressure Distribution in Floor Tiles with Printed P(VDF:TrFE) Sensors for Smart Surface Applications. Sensors. 2023; 23(2):603. https://doi.org/10.3390/s23020603
Chicago/Turabian StyleAlvarez Rueda, Asier, Philipp Schäffner, Andreas Petritz, Jonas Groten, Andreas Tschepp, Frank Petersen, Martin Zirkl, and Barbara Stadlober. 2023. "Study of Pressure Distribution in Floor Tiles with Printed P(VDF:TrFE) Sensors for Smart Surface Applications" Sensors 23, no. 2: 603. https://doi.org/10.3390/s23020603
APA StyleAlvarez Rueda, A., Schäffner, P., Petritz, A., Groten, J., Tschepp, A., Petersen, F., Zirkl, M., & Stadlober, B. (2023). Study of Pressure Distribution in Floor Tiles with Printed P(VDF:TrFE) Sensors for Smart Surface Applications. Sensors, 23(2), 603. https://doi.org/10.3390/s23020603