
Experimental Study on Monitoring Damage Progression of Basalt-FRP Reinforced Concrete Slabs Using Acoustic Emission and Machine Learning



Abstract
:1. Introduction
2. AE Features for Damage Evolution and Characterization in Concrete
3. Experimental Design
3.1. BFRP Concrete Slabs
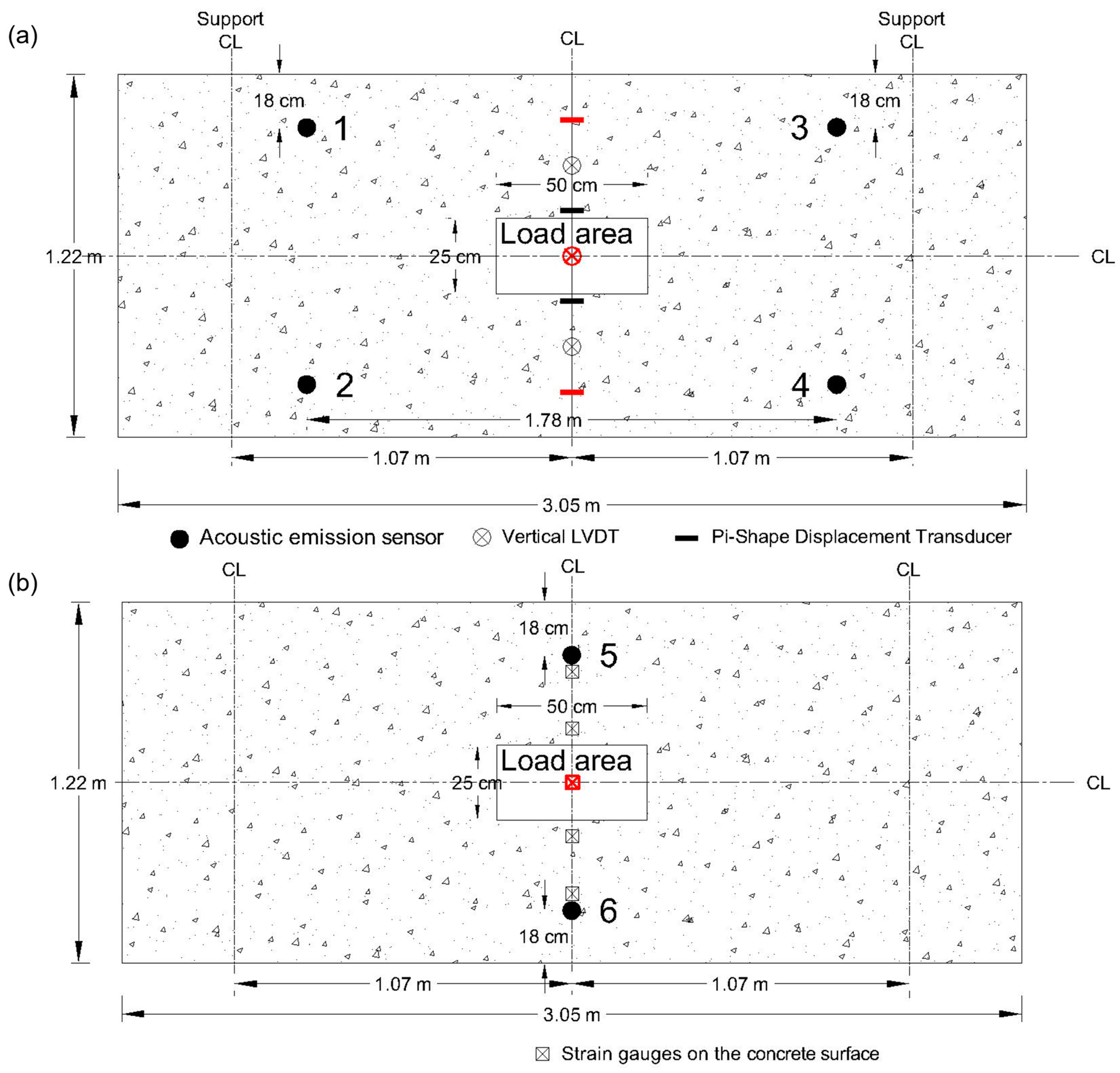
3.2. Instrumentation
4. Experimental Results
4.1. The Identification of Damage Progression Using Global Analysis
4.2. The Identification of Damage Progression Using AE Feature Analysis
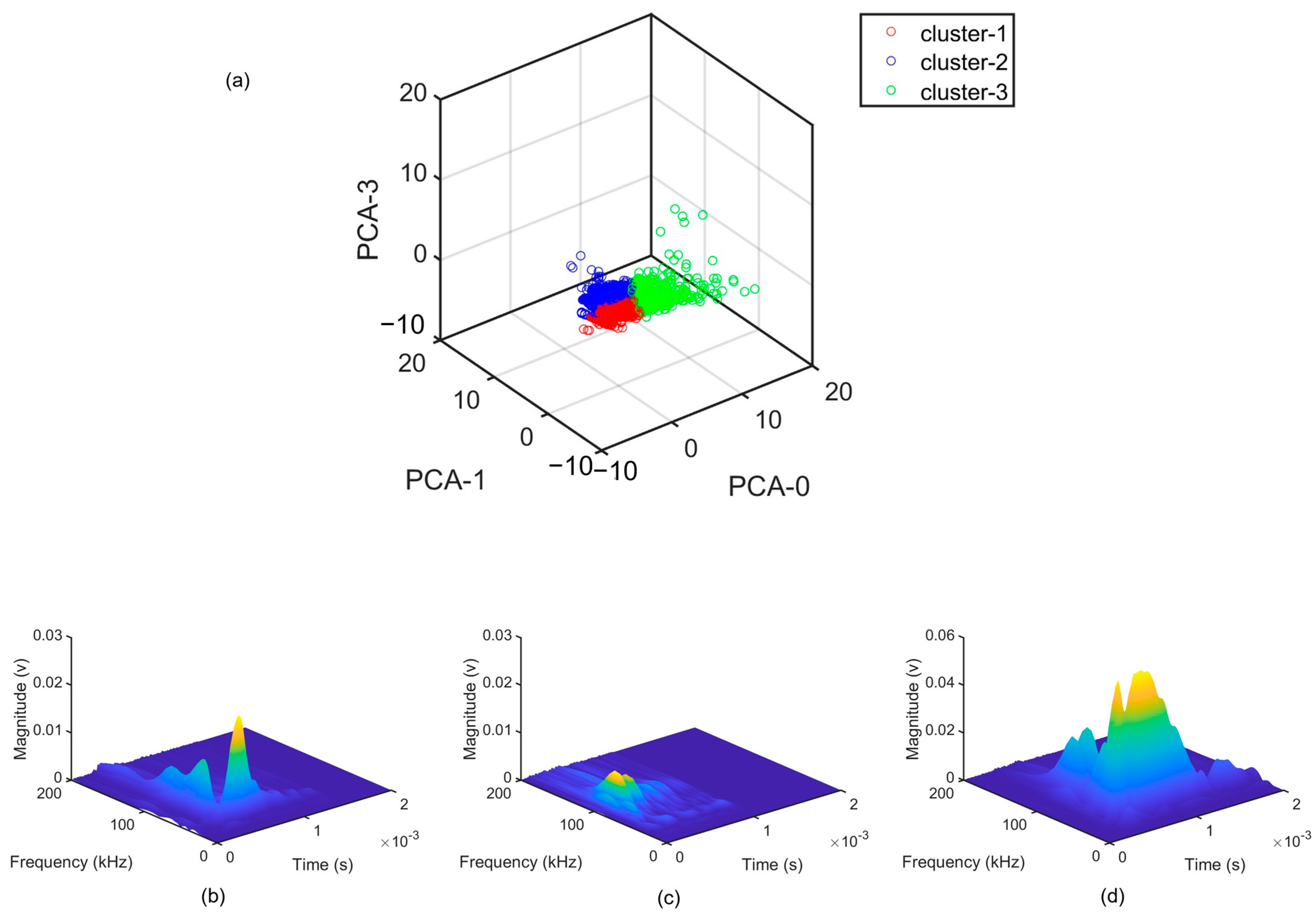
4.3. The Identification of Damage Modes Using Machine Learning
4.4. SHAP Analysis for the Correlation of AE Feature and Crack Width
5. Factors to Consider for Adapting the Models to Field Applications
6. Conclusions
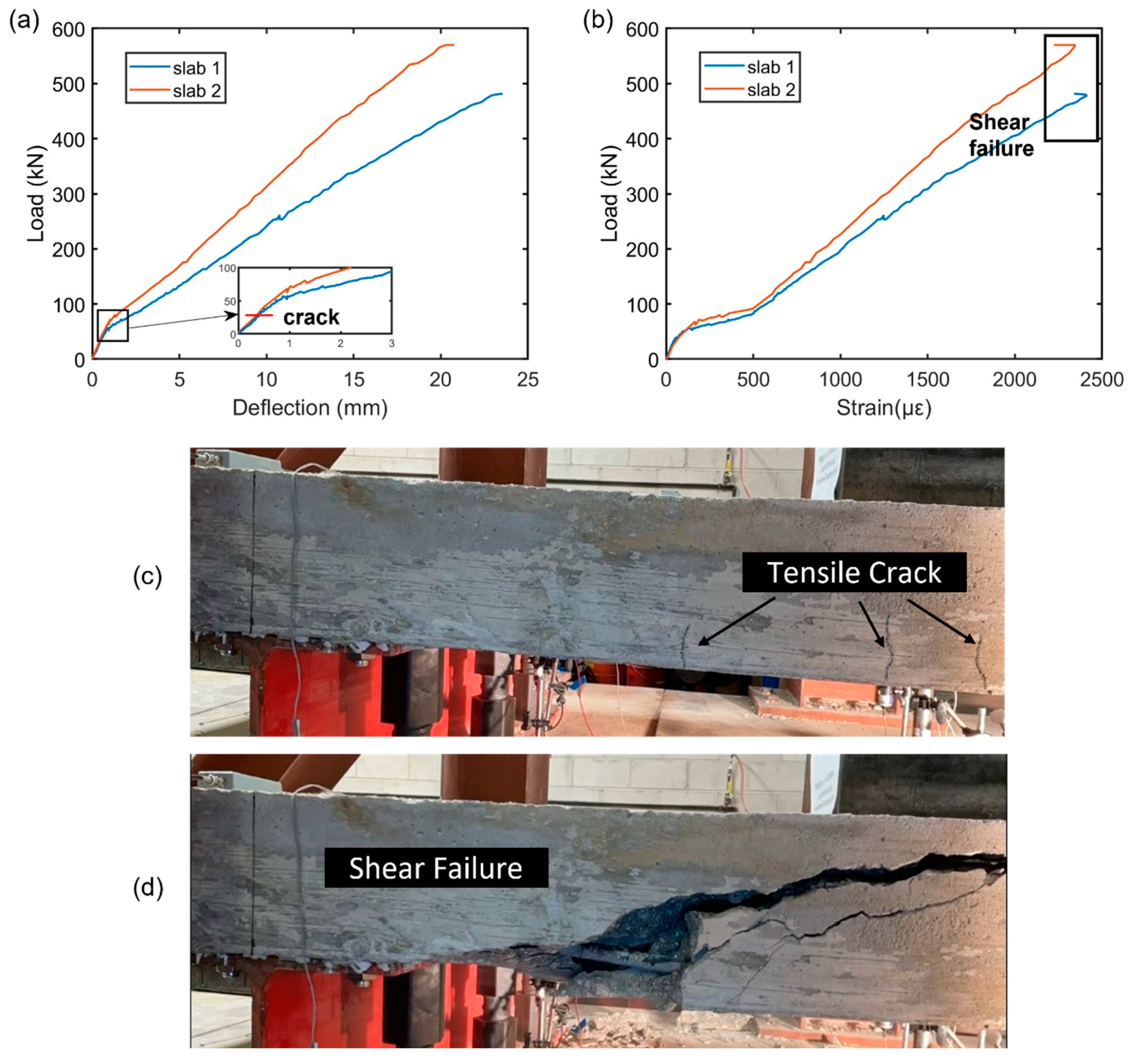
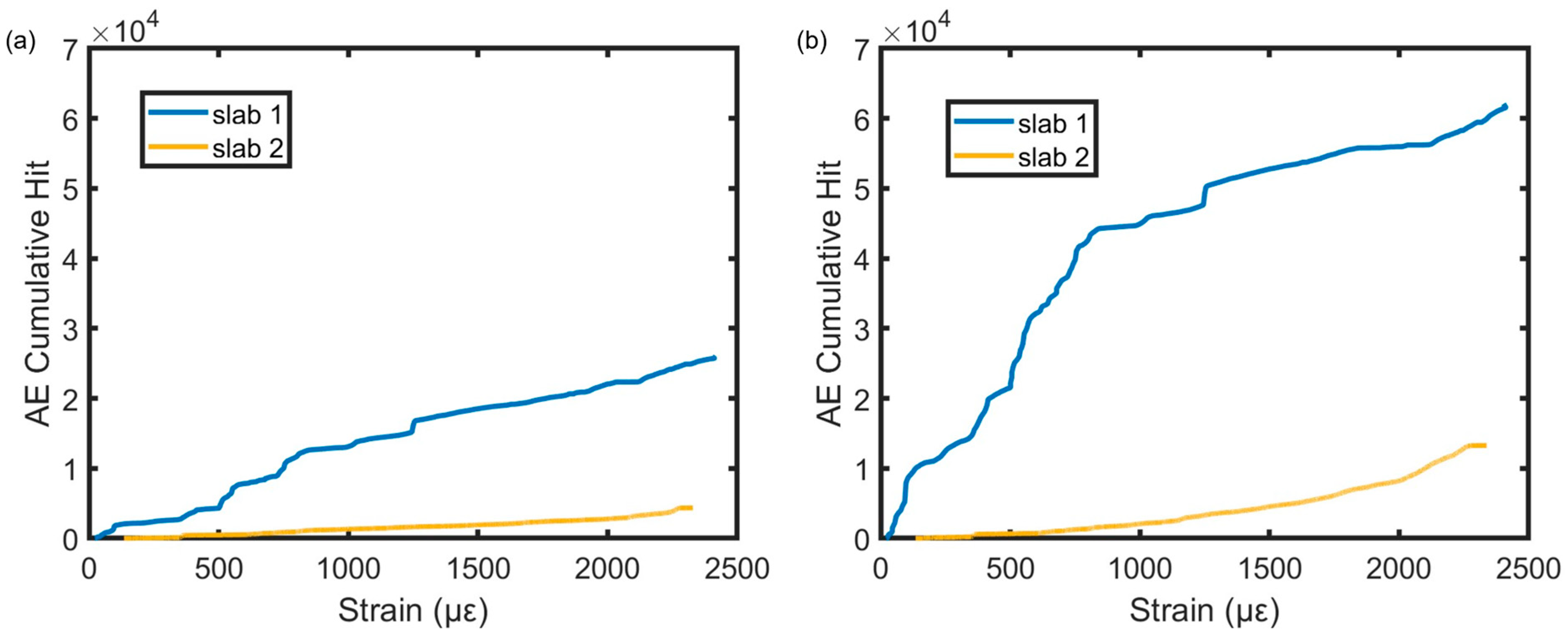
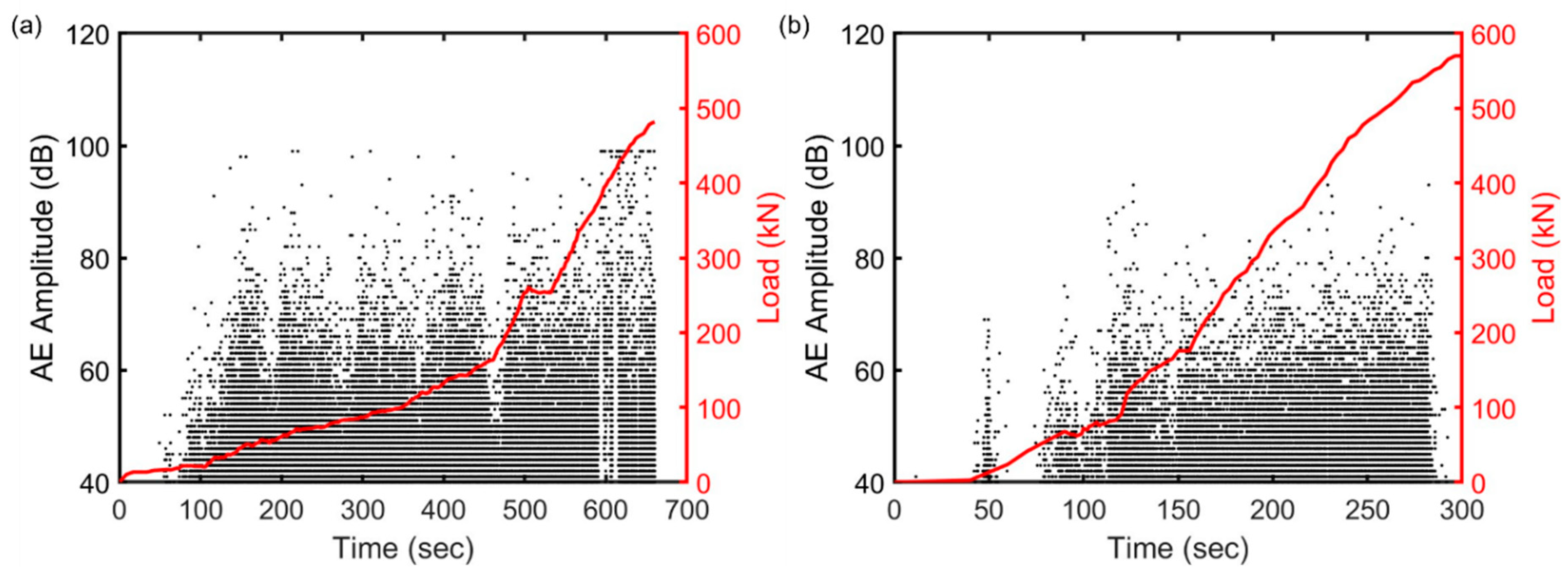
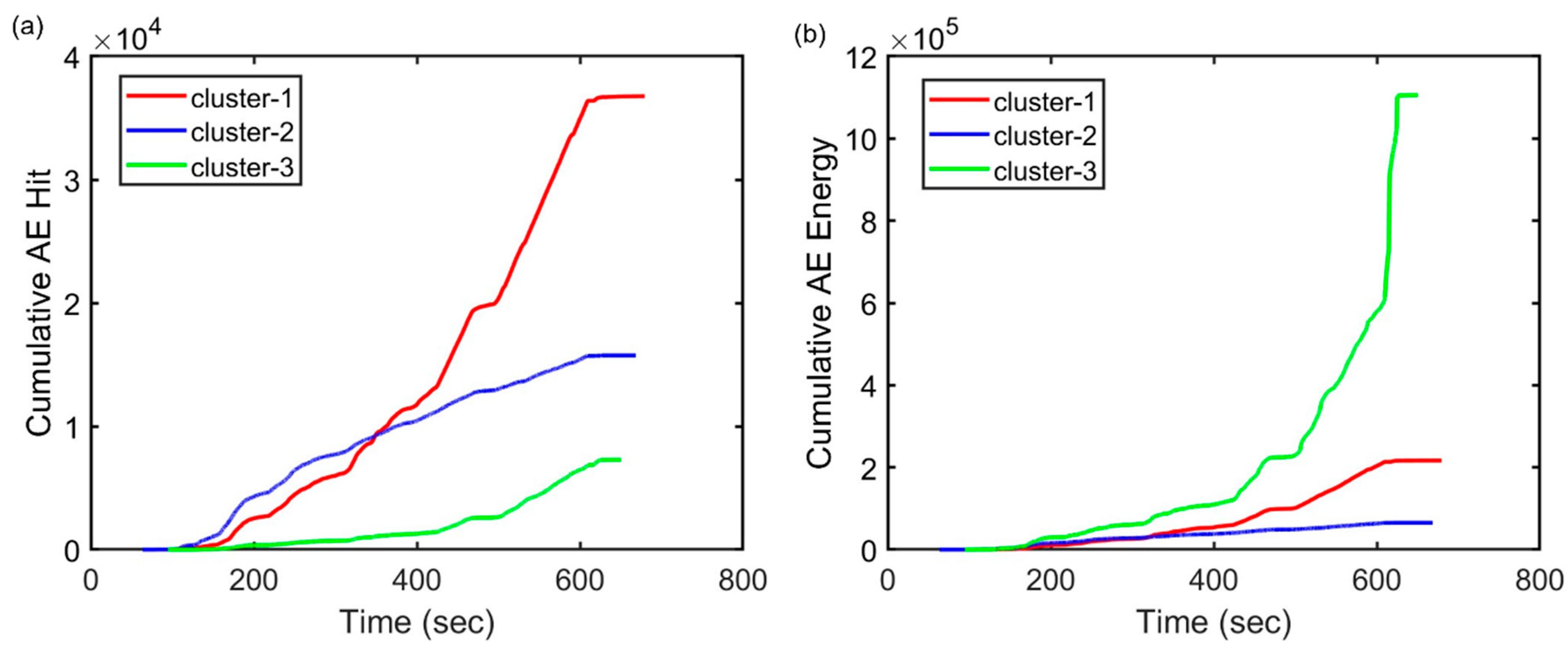
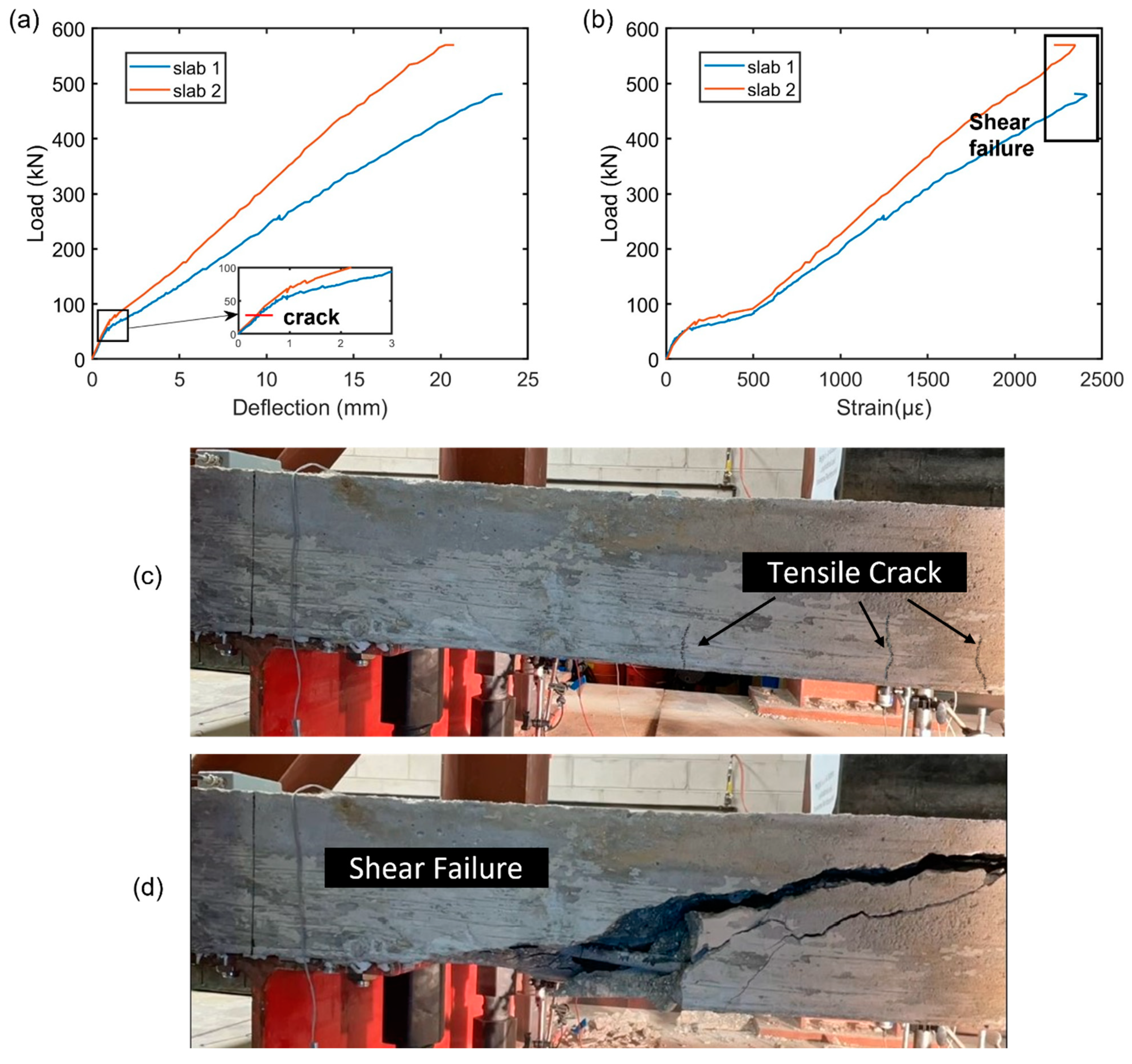
- The load–deflection and load–strain curves were good indicators of damage initiation, as corroborated by visual inspection. Prior to the crack initiation, the load–deflection behaviors of the two slabs exhibited similar patterns, however, once the tensile cracks formed, the behaviors varied with respect to the reinforcement ratio. The AE behavior changed accordingly. The slab with the higher reinforcement ratio released fewer AE hits due to stiffer behavior. The reinforcement ratio plays an important role when the cumulative AE hits or energy curves are used to differentiate the damage progression. The relationship between AE features and the local strain was found to provide damage information in the absence of strain data. Mid-span sensor locations exhibited higher AE activity than support regions, as expected, due to their proximity to the tensile crack source.
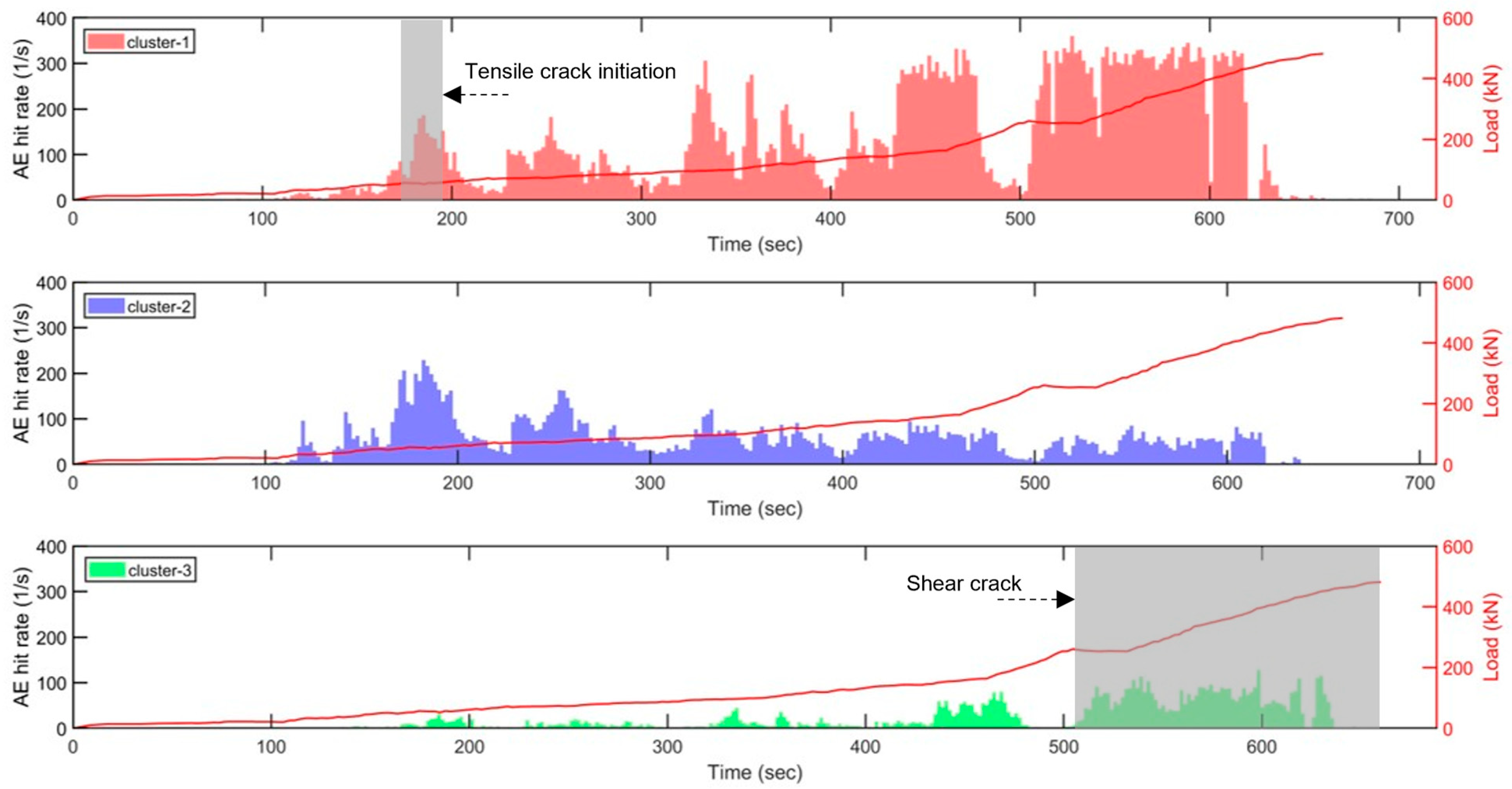
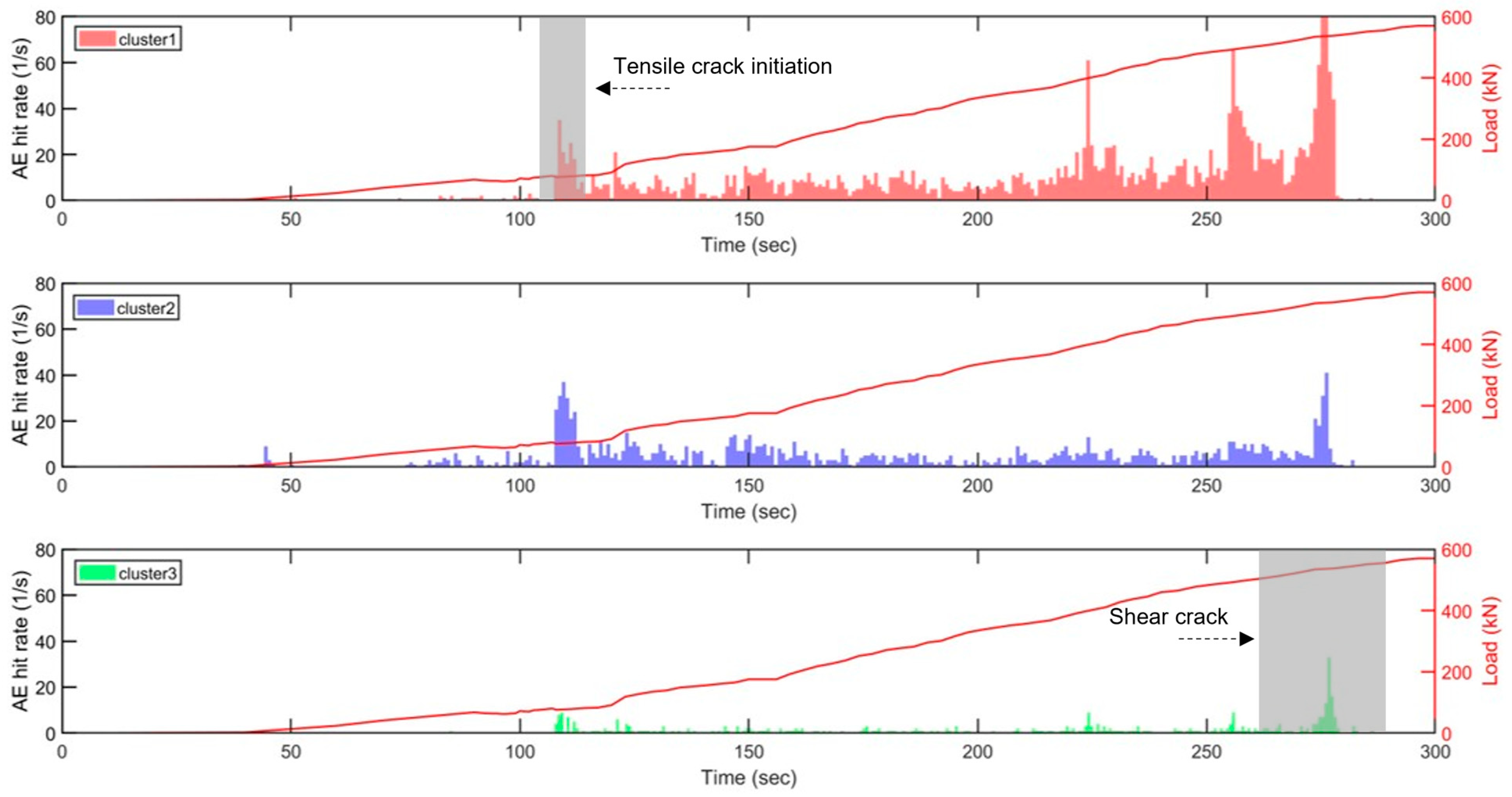
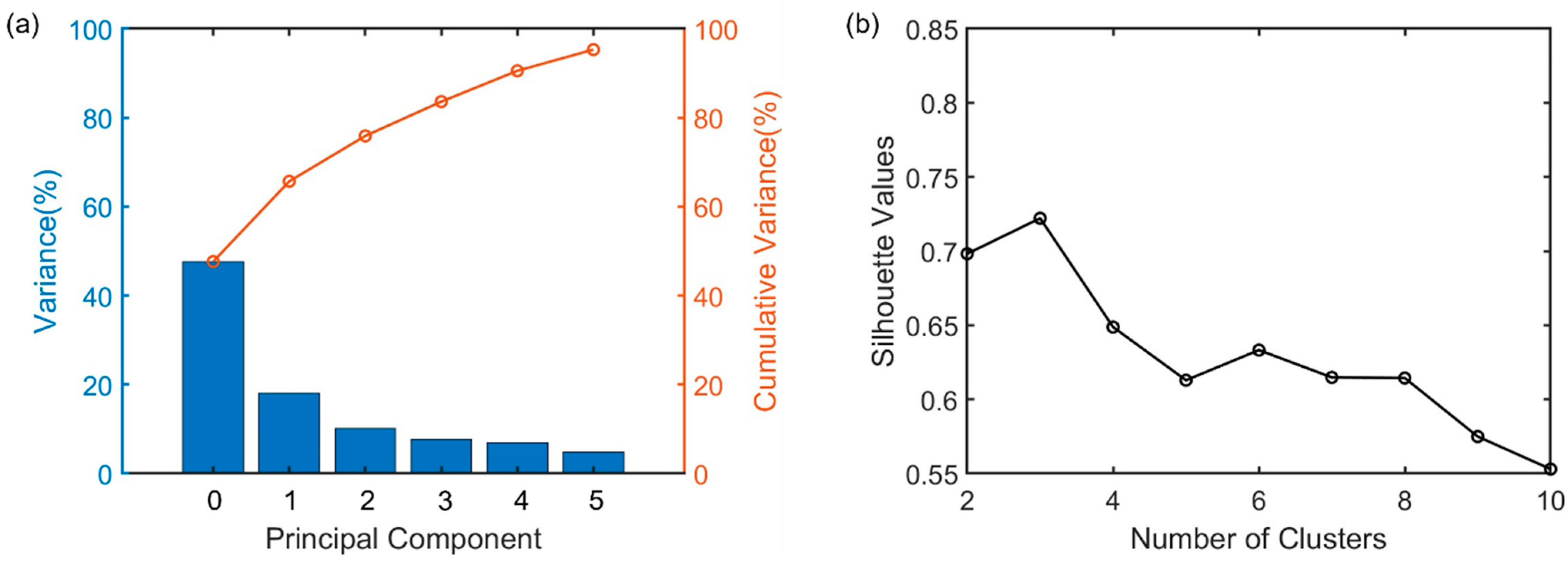
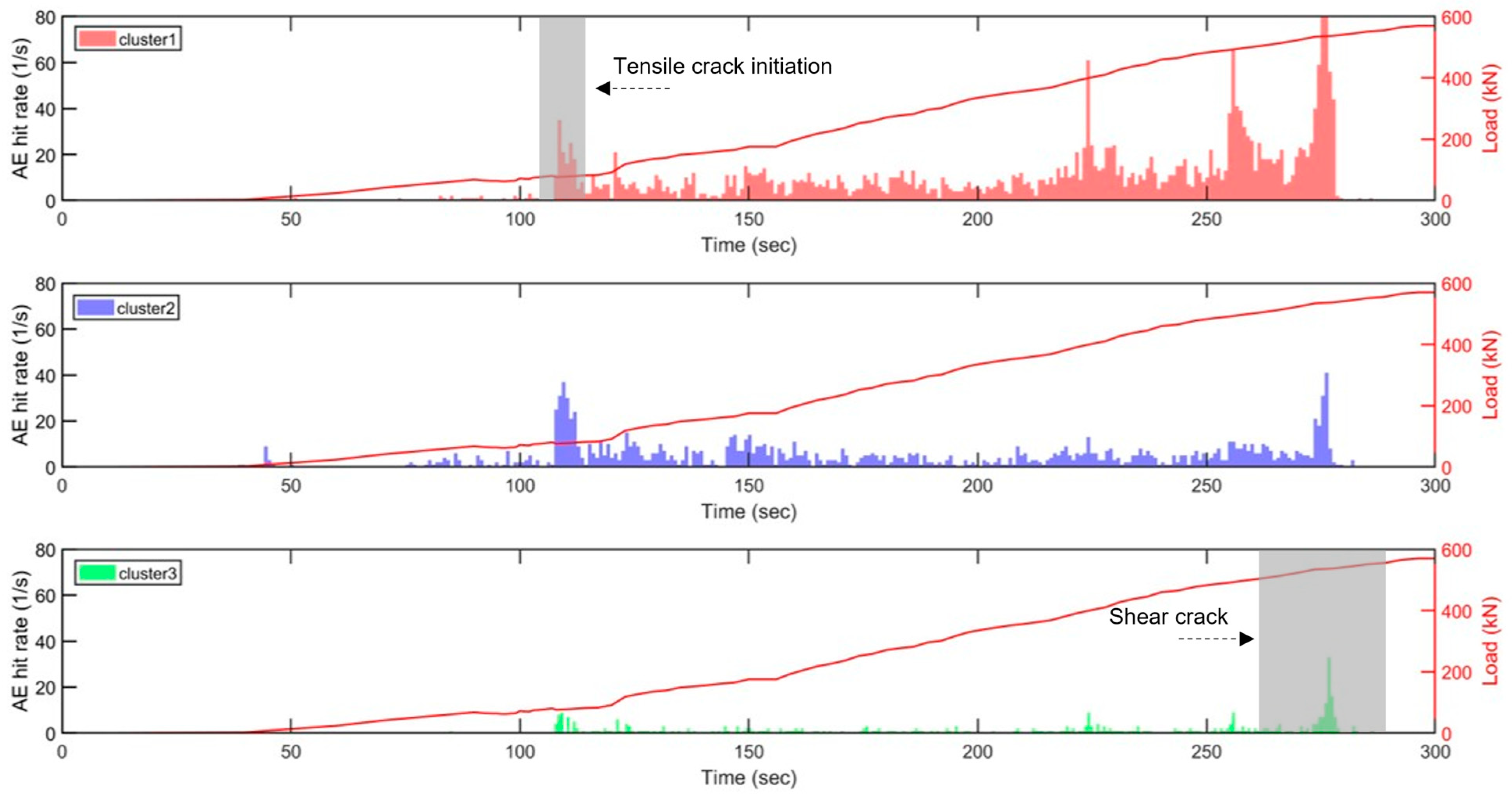
- A methodology integrating cluster analysis and the k-nearest neighbor (K-NN) algorithm was presented for predicting the required principal component axes and clusters within data sets. The machine learning model’s validity was evaluated using multiple data sets to detect cracking types and progression toward failure. A distinct characteristic between tensile and shear cracks was shown to detect the failure progression. In a realistic environment where the load is not gradually increased to form damage, the machine learning model developed in this study can differentiate AE sources and identify the progression of cracking from tensile to shear. The accuracy of the K-NN model trained on the first slab was 99.2% in predicting three clusters (tensile crack, shear crack, and noise).
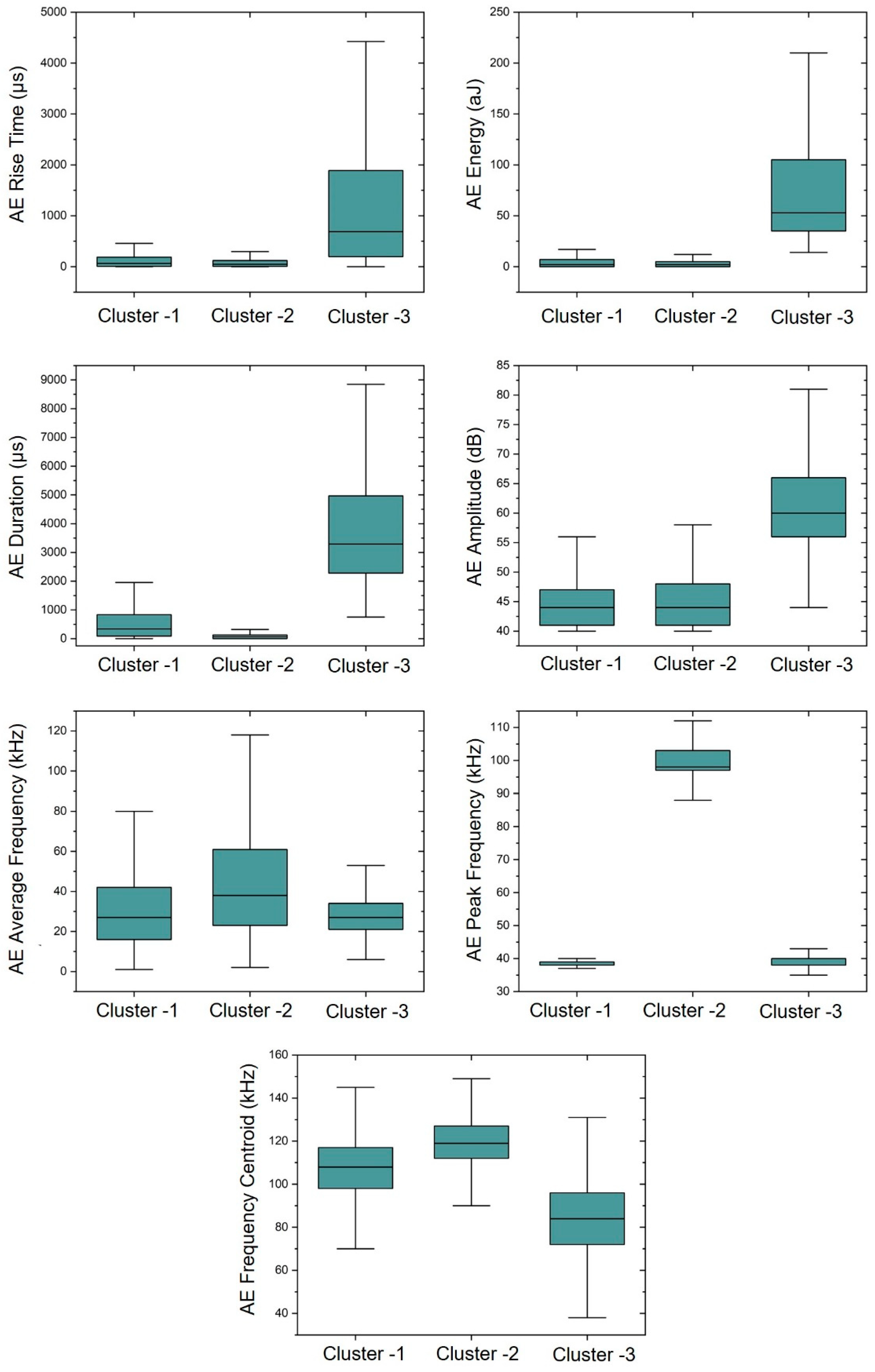
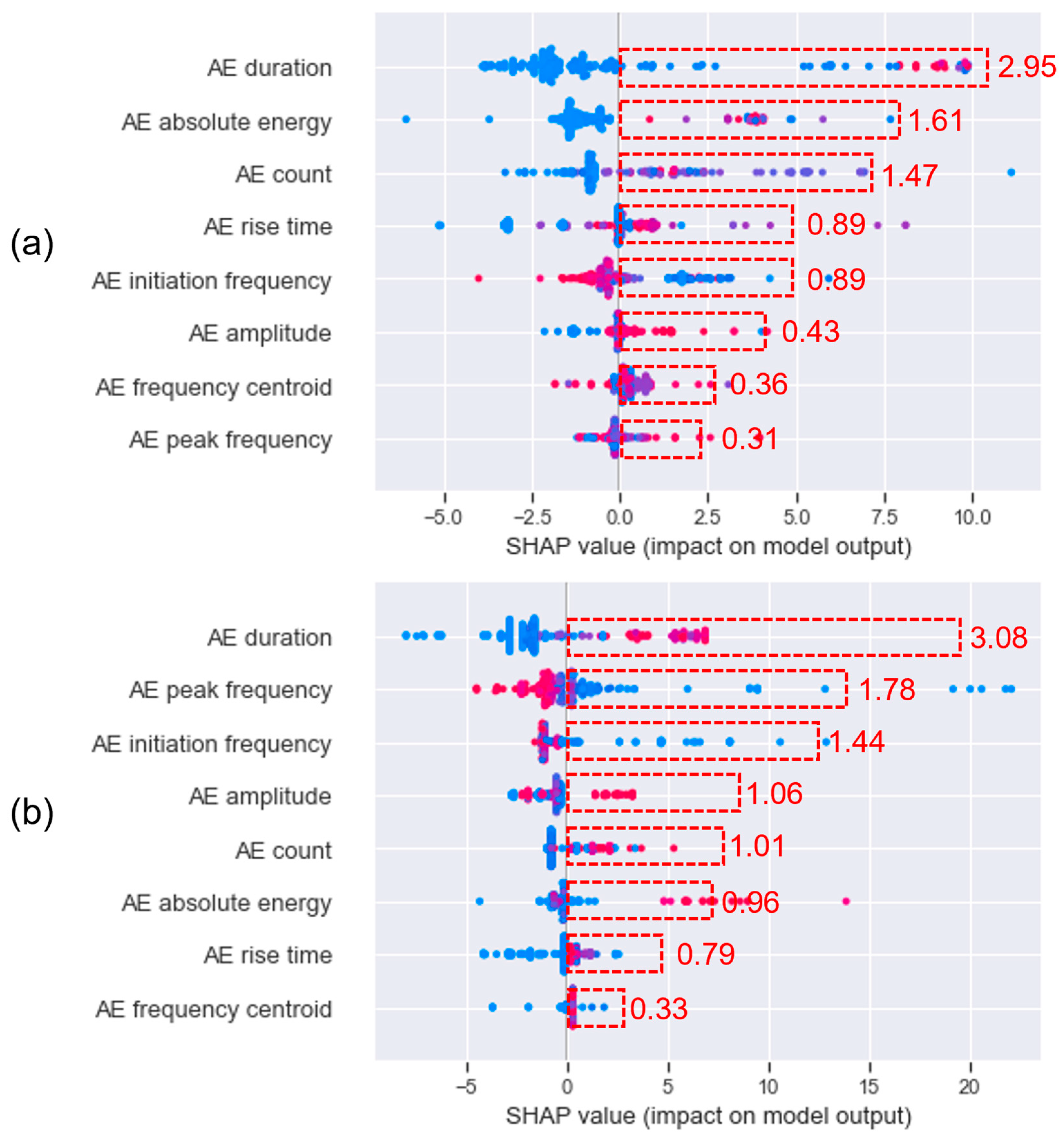
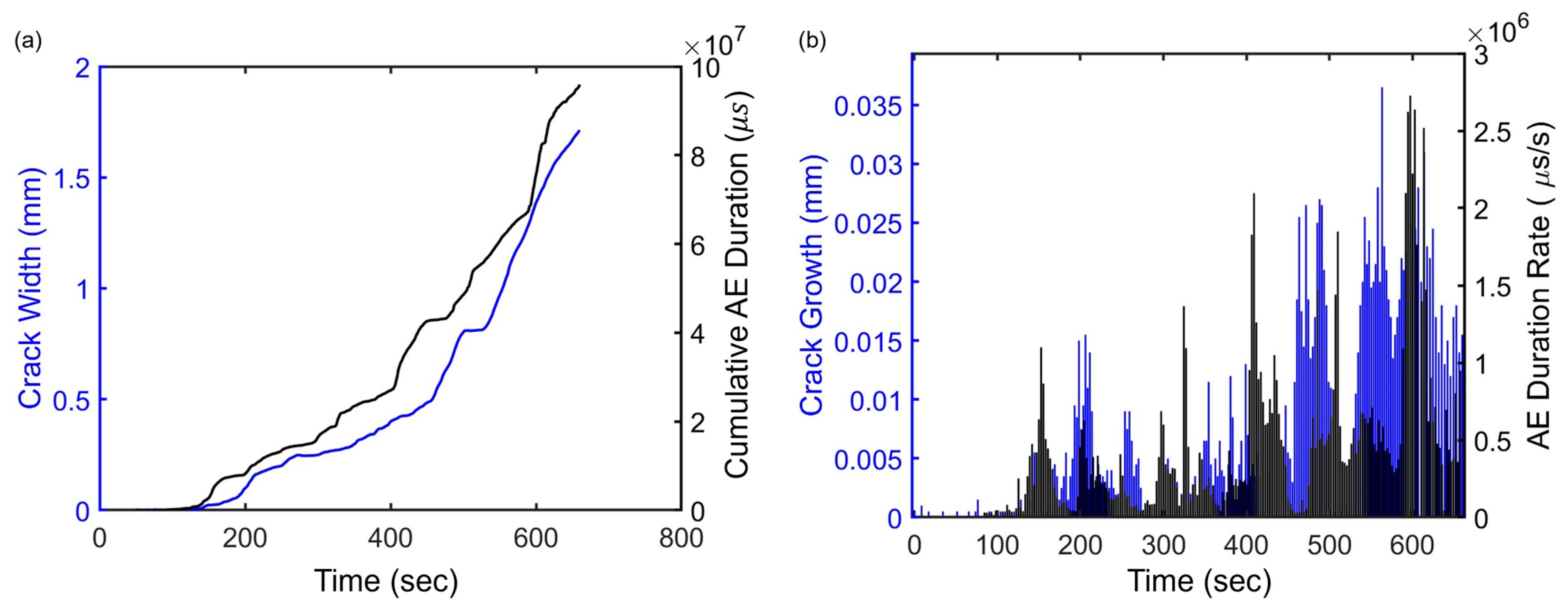
- SHAP (SHapley Additive exPlanations) analysis was shown as an effective signal processing tool to identify the most sensitive AE feature to the physical variable. The AE duration was determined as the feature related to the crack width. This is explained by the source function behavior that longer crack growth has a longer duration of source function that contributes to the duration of the AE signal as the AE signal is the convolution of source and medium transfer functions. The Pearson correlation coefficient of AE duration related to crack width achieves 0.9899. The approach is applicable for local monitoring to track the progression of known defects or to evaluate the damage state of critical regions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xian, G.; Guo, R.; Li, C. Combined Effects of Sustained Bending Loading, Water Immersion and Fiber Hybrid Mode on the Mechanical Properties of Carbon/Glass Fiber Reinforced Polymer Composite. Compos. Struct. 2022, 281, 115060. [Google Scholar] [CrossRef]
- Li, S.; Guo, S.; Yao, Y.; Jin, Z.; Shi, C.; Zhu, D. The Effects of Aging in Seawater and SWSSC and Strain Rate on the Tensile Performance of GFRP/BFRP Composites: A Critical Review. Constr. Build. Mater. 2021, 282, 122534. [Google Scholar] [CrossRef]
- Wu, J.; Zhu, Y.; Li, C. Experimental Investigation of Fatigue Capacity of Bending-Anchored CFRP Cables. Polymers 2023, 15, 2483. [Google Scholar] [CrossRef]
- Nanni, A. Flexural Behavior and Design of RC Members Using FRP Reinforcement. J. Struct. Eng. 1993, 119, 3344–3359. [Google Scholar] [CrossRef]
- Bank, L.C. Composites for Construction; Wiley: Hoboken, NJ, USA, 2006; ISBN 9780471681267. [Google Scholar]
- Pereira, S.; Magalhães, F.; Gomes, J.P.; Cunha, Á.; Lemos, J.V. Vibration-Based Damage Detection of a Concrete Arch Dam. Eng. Struct. 2021, 235, 112032. [Google Scholar] [CrossRef]
- Saidin, S.S.; Kudus, S.A.; Jamadin, A.; Anuar, M.A.; Amin, N.M.; Ibrahim, Z.; Zakaria, A.B.; Sugiura, K. Operational Modal Analysis and Finite Element Model Updating of Ultra-High-Performance Concrete Bridge Based on Ambient Vibration Test. Case Stud. Constr. Mater. 2022, 16, e01117. [Google Scholar] [CrossRef]
- Baba, S.; Kondoh, J. Damage Evaluation of Fixed Beams at Both Ends for Bridge Health Monitoring Using a Combination of a Vibration Sensor and a Surface Acoustic Wave Device. Eng. Struct. 2022, 262, 114323. [Google Scholar] [CrossRef]
- Sakiyama, F.I.H.; Lehmann, F.; Garrecht, H. Structural Health Monitoring of Concrete Structures Using Fibre-Optic-Based Sensors: A Review. Mag. Concr. Res. 2021, 73, 174–194. [Google Scholar] [CrossRef]
- Čápová, K.; Velebil, L.; Včelák, J. Laboratory and In-Situ Testing of Integrated FBG Sensors for SHM for Concrete and Timber Structures. Sensors 2020, 20, 1661. [Google Scholar] [CrossRef]
- Ma, Z.; Hong, W. Distributed Displacement Estimation of Pre-Stressed Concrete Beams with Random Cracks Using Long-Gauge Strain Sensing. Case Stud. Constr. Mater. 2022, 17, e01296. [Google Scholar] [CrossRef]
- Alwis, L.S.M.; Bremer, K.; Roth, B. Fiber Optic Sensors Embedded in Textile-Reinforced Concrete for Smart Structural Health Monitoring: A Review. Sensors 2021, 21, 4948. [Google Scholar] [CrossRef]
- Wu, B.; Wu, G.; Yang, C.; He, Y. Damage Identification Method for Continuous Girder Bridges Based on Spatially-Distributed Long-Gauge Strain Sensing under Moving Loads. Mech. Syst. Signal Process. 2018, 104, 415–435. [Google Scholar] [CrossRef]
- Du, F.; Li, D.; Li, Y. Fracture Mechanism and Damage Evaluation of FRP/Steel–Concrete Hybrid Girder Using Acoustic Emission Technique. J. Mater. Civ. Eng. 2019, 31, 04019111. [Google Scholar] [CrossRef]
- Banjara, N.K.; Sasmal, S.; Srinivas, V. Investigations on Acoustic Emission Parameters during Damage Progression in Shear Deficient and GFRP Strengthened Reinforced Concrete Components. Measurement 2019, 137, 501–514. [Google Scholar] [CrossRef]
- De Smedt, M.; Vandecruys, E.; Vrijdaghs, R.; Verstrynge, E.; Vandewalle, L. Acoustic Emission-Based Damage Analysis of Steel Fibre Reinforced Concrete in Progressive Cyclic Uniaxial Tension Tests. Constr. Build. Mater. 2022, 321, 126254. [Google Scholar] [CrossRef]
- Xargay, H.; Ripani, M.; Folino, P.; Núñez, N.; Caggiano, A. Acoustic Emission and Damage Evolution in Steel Fiber-Reinforced Concrete Beams under Cyclic Loading. Constr. Build. Mater. 2021, 274, 121831. [Google Scholar] [CrossRef]
- Liu, F.; Guo, R.; Lin, X.; Zhang, X.; Huang, S.; Yang, F.; Cheng, X. Monitoring the Damage Evolution of Reinforced Concrete during Tunnel Boring Machine Hoisting by Acoustic Emission. Constr. Build. Mater. 2022, 327, 127000. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, Y.; Naaktgeboren, M.; Hendriks, M.A.N. Probability Density Field of Acoustic Emission Events: Damage Identification in Concrete Structures. Constr. Build. Mater. 2022, 327, 126984. [Google Scholar] [CrossRef]
- Abouhussien, A.A.; Hassan, A.A.A. Evaluation of Damage Progression in Concrete Structures Due to Reinforcing Steel Corrosion Using Acoustic Emission Monitoring. J. Civ. Struct. Health Monit. 2015, 5, 751–765. [Google Scholar] [CrossRef]
- Vidya Sagar, R. Verification of the Applicability of the Gaussian Mixture Modelling for Damage Identification in Reinforced Concrete Structures Using Acoustic Emission Testing. J. Civ. Struct. Health Monit. 2018, 8, 395–415. [Google Scholar] [CrossRef]
- Vidya Sagar, R.; Raghu Prasad, B.K. Laboratory Investigations on Cracking in Reinforced Concrete Beams Using On-Line Acoustic Emission Monitoring Technique. J. Civ. Struct. Health Monit. 2013, 3, 169–186. [Google Scholar] [CrossRef]
- Bayane, I.; Brühwiler, E. Structural Condition Assessment of Reinforced-Concrete Bridges Based on Acoustic Emission and Strain Measurements. J. Civ. Struct. Health Monit. 2020, 10, 1037–1055. [Google Scholar] [CrossRef]
- Shahidan, S.; Pulin, R.; Muhamad Bunnori, N.; Holford, K.M. Damage Classification in Reinforced Concrete Beam by Acoustic Emission Signal Analysis. Constr. Build. Mater. 2013, 45, 78–86. [Google Scholar] [CrossRef]
- Sharma, G.; Sharma, S.; Sharma, S.K. Monitoring Structural Behaviour of Concrete Beams Reinforced with Steel and GFRP Bars Using Acoustic Emission and Digital Image Correlation Techniques. Struct. Infrastruct. Eng. 2020, 18, 167–182. [Google Scholar] [CrossRef]
- Sagar, R.V.; Prasad, B.K.R.; Kumar, S.S. An Experimental Study on Cracking Evolution in Concrete and Cement Mortar by the B-Value Analysis of Acoustic Emission Technique. Cem. Concr. Res. 2012, 42, 1094–1104. [Google Scholar] [CrossRef]
- Lee, H.-L.; Kim, J.-S.; Hong, C.-H.; Cho, D.-K. Ensemble Learning Approach for the Prediction of Quantitative Rock Damage Using Various Acoustic Emission Parameters. Appl. Sci. 2021, 11, 4008. [Google Scholar] [CrossRef]
- Van Steen, C.; Nasser, H.; Verstrynge, E.; Wevers, M. Acoustic Emission Source Characterisation of Chloride-Induced Corrosion Damage in Reinforced Concrete. Struct. Health Monit. 2021, 21, 1266–1286. [Google Scholar] [CrossRef]
- Noorsuhada, M.N. An Overview on Fatigue Damage Assessment of Reinforced Concrete Structures with the Aid of Acoustic Emission Technique. Constr. Build. Mater. 2016, 112, 424–439. [Google Scholar] [CrossRef]
- Yapar, O.; Basu, P.K.; Volgyesi, P.; Ledeczi, A. Structural Health Monitoring of Bridges with Piezoelectric AE Sensors. Eng. Fail. Anal. 2015, 56, 150–169. [Google Scholar] [CrossRef]
- Nair, A.; Cai, C.S.; Kong, X. Using Acoustic Emission to Monitor Failure Modes in CFRP-Strengthened Concrete Structures. J. Aerosp. Eng. 2020, 33, 04019110. [Google Scholar] [CrossRef]
- Alver, N.; Tanarslan, H.M.; Tayfur, S. Monitoring Fracture Processes of CFRP-Strengthened RC Beam by Acoustic Emission. J. Infrastruct. Syst. 2017, 23, B4016002. [Google Scholar] [CrossRef]
- Ma, G.; Wu, C.; Hwang, H.-J.; Li, B. Crack Monitoring and Damage Assessment of BFRP-Jacketed Concrete Cylinders under Compression Load Based on Acoustic Emission Techniques. Constr. Build. Mater. 2021, 272, 121936. [Google Scholar] [CrossRef]
- Chen, Y.; Chen, S. Experimental Study on Acoustic Emission Characteristics of Bond-Slip for BFRP Concrete. Russ. J. Nondestruct. Test. 2020, 56, 119–130. [Google Scholar] [CrossRef]
- Liu, H.; Liu, S.; Zhou, P.; Zhang, Y.; Jiao, Y. Mechanical Properties and Crack Classification of Basalt Fiber RPC Based on Acoustic Emission Parameters. Appl. Sci. 2019, 9, 3931. [Google Scholar] [CrossRef]
- Vetrone, J.; Obregon, J.E.; Indacochea, E.J.; Ozevin, D. The Characterization of Deformation Stage of Metals Using Acoustic Emission Combined with Nonlinear Ultrasonics. Measurement 2021, 178, 109407. [Google Scholar] [CrossRef]
- RILEM Technical Committee (Masayasu Ohtsu). Recommendation of RILEM TC 212-ACD: Acoustic Emission and Related NDE Techniques for Crack Detection and Damage Evaluation in Concrete. Mater. Struct. 2010, 43, 1187–1189. [Google Scholar] [CrossRef]
- Aggelis, D.G.; Shiotani, T.; Papacharalampopoulos, A.; Polyzos, D. The Influence of Propagation Path on Elastic Waves as Measured by Acoustic Emission Parameters. Struct. Health Monit. 2011, 11, 359–366. [Google Scholar] [CrossRef]
- Zhang, F.; Yang, Y.; Fennis, S.A.A.M.; Hendriks, M.A.N. Developing a New Acoustic Emission Source Classification Criterion for Concrete Structures Based on Signal Parameters. Constr. Build. Mater. 2022, 318, 126163. [Google Scholar] [CrossRef]
- Mandal, D.D.; Bentahar, M.; El Mahi, A.; Brouste, A.; El Guerjouma, R.; Montresor, S.; Cartiaux, F.-B. Acoustic Emission Monitoring of Progressive Damage of Reinforced Concrete T-Beams under Four-Point Bending. Materials 2022, 15, 3486. [Google Scholar] [CrossRef]
- Ahmed, J.; Zhang, T.; Ozevin, D.; Daly, M. A Multiscale Indentation-Based Technique to Correlate Acoustic Emission with Deformation Mechanisms in Complex Alloys. Mater. Charact. 2021, 182, 111575. [Google Scholar] [CrossRef]
- Mahdi, M. Mechanical Properties and Structural Behavior of Bridge Deck Slabs Reinforced with Basalt-FRP Bars. Ph.D. Thesis, University of Illinois at Chicago, Chicago, IL, USA, 2023. [Google Scholar]
- Tayfur, S.; Zhang, T.; Mahdi, M.; Issa, M.; Ozevin, D. Cluster-Based Sensor Selection Framework for Acoustic Emission Source Localization in Concrete. Measurement 2023, 219, 113293. [Google Scholar] [CrossRef]
- Zhang, T.; Tayfur, S.; Ozevin, D. The Efficiency of Arrival Time Picking Methods for Acoustic Emission Source Localization in Structures with Simultaneous Damage Mechanisms. In Proceedings of the Nondestructive Characterization and Monitoring of Advanced Materials, Aerospace, Civil Infrastructure, and Transportation XVII, Long Beach, CA, USA, 13–16 March 2023; SPIE: Bellingham, DC, USA, 2023; Volume 12487, pp. 188–195. [Google Scholar]
- Rousseeuw, P.J. Silhouettes: A Graphical Aid to the Interpretation and Validation of Cluster Analysis. J. Comput. Appl. Math. 1987, 20, 53–65. [Google Scholar] [CrossRef]
- Sause, M.G.R.; Gribov, A.; Unwin, A.R.; Horn, S. Pattern Recognition Approach to Identify Natural Clusters of Acoustic Emission Signals. Pattern Recognit. Lett. 2012, 33, 17–23. [Google Scholar] [CrossRef]
- Sibil, A.; Godin, N.; R’Mili, M.; Maillet, E.; Fantozzi, G. Optimization of Acoustic Emission Data Clustering by a Genetic Algorithm Method. J. Nondestruct. Eval. 2012, 31, 169–180. [Google Scholar] [CrossRef]
- Prem, P.R.; Murthy, A.R. Acoustic Emission Monitoring of Reinforced Concrete Beams Subjected to Four-Point-Bending. Appl. Acoust. 2017, 117, 28–38. [Google Scholar] [CrossRef]
- Han, Q.; Yang, G.; Xu, J.; Fu, Z.; Lacidogna, G.; Carpinteri, A. Acoustic Emission Data Analyses Based on Crumb Rubber Concrete Beam Bending Tests. Eng. Fract. Mech. 2019, 210, 189–202. [Google Scholar] [CrossRef]
- Li, G.; Zhang, L.; Zhao, F.; Tang, J. Acoustic Emission Characteristics and Damage Mechanisms Investigation of Basalt Fiber Concrete with Recycled Aggregate. Materials 2020, 13, 4009. [Google Scholar] [CrossRef] [PubMed]
- Guo, G.; Wang, H.; Bell, D.; Bi, Y.; Greer, K. KNN Model-Based Approach in Classification. In Proceedings of the Move to Meaningful Internet Systems 2003: CoopIS, DOA, and ODBASE, Sicily, Italy, 3–7 November 2003; pp. 986–996. [Google Scholar]
- Review of Building Code Requirements for Structural Concrete (ACI 318-95) and Commentary (ACI 318R-95) by ACI Committee 318. J. Archit. Eng. 1996, 2, 120. [CrossRef]
- Lundberg, S.M.; Lee, S.-I. A Unified Approach to Interpreting Model Predictions. Adv. Neural Inf. Process. Syst. 2017, 30. Available online: https://proceedings.neurips.cc/paper_files/paper/2017/file/8a20a8621978632d76c43dfd28b67767-Paper.pdf (accessed on 12 September 2023).
- Benesty, J.; Chen, J.; Huang, Y.; Cohen, I. Optimal Filters in the Time Domain. In Noise Reduction in Speech Processing; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2009; pp. 1–18. [Google Scholar]
- Mousavi, M.; Taskhiri, M.S.; Gandomi, A.H. Standing Tree Health Assessment Using Contact–Ultrasonic Testing and Machine Learning. Comput. Electron. Agric. 2023, 209, 107816. [Google Scholar] [CrossRef]
- El Najjar, J.; Mustapha, S. Condition Assessment of Timber Utility Poles Using Ultrasonic Guided Waves. Constr. Build. Mater. 2021, 272, 121902. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Slab # | Length × Width, m. | Bar Size | Reinforcement Spacing, cm. | Reinforcement Ratio |
|---|---|---|---|---|
| 1 | 3.05 × 1.22 | #5 | 15.24 | 0.773 |
| 2 | 3.05 × 1.22 | #6 | 15.24 | 1.107 |
| Bar Size | Young’s Modulus, MPa (ksi) | Ultimate Stress, MPa (ksi) |
|---|---|---|
| #5 | 59,805 (8674) | 1392 (202) |
| #6 | 60,660 (8798) | 1179 (171) |
| Cluster | ) | ) | ) | ) | ) | ) | ) |
|---|---|---|---|---|---|---|---|
| 1 | 188.4 | 4.9 | 572.9 | 44.6 | 32.0 | 38.6 | 107.5 |
| 2 | 127.44 | 3.9 | 137.4 | 45 | 43.1 | 98.9 | 120.2 |
| 3 | 1483.29 | 174.5 | 4652.9 | 61.5 | 28.7 | 46.2 | 84.1 |
| Training Set | Testing Set | Classification Results of Testing Set |
|---|---|---|
| Sensor 5, slab 1 | Sensor 6, slab 1 | Cluster 1—61.5% Cluster 2—26.3% Cluster 3—12.2% |
| Sensor 5, slab 2 | Cluster 1—60.1% Cluster 2—30.8% Cluster 3—9.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Mahdi, M.; Issa, M.; Xu, C.; Ozevin, D. Experimental Study on Monitoring Damage Progression of Basalt-FRP Reinforced Concrete Slabs Using Acoustic Emission and Machine Learning. Sensors 2023, 23, 8356. https://doi.org/10.3390/s23208356
Zhang T, Mahdi M, Issa M, Xu C, Ozevin D. Experimental Study on Monitoring Damage Progression of Basalt-FRP Reinforced Concrete Slabs Using Acoustic Emission and Machine Learning. Sensors. 2023; 23(20):8356. https://doi.org/10.3390/s23208356
Chicago/Turabian StyleZhang, Tonghao, Mohammad Mahdi, Mohsen Issa, Chenxi Xu, and Didem Ozevin. 2023. "Experimental Study on Monitoring Damage Progression of Basalt-FRP Reinforced Concrete Slabs Using Acoustic Emission and Machine Learning" Sensors 23, no. 20: 8356. https://doi.org/10.3390/s23208356
APA StyleZhang, T., Mahdi, M., Issa, M., Xu, C., & Ozevin, D. (2023). Experimental Study on Monitoring Damage Progression of Basalt-FRP Reinforced Concrete Slabs Using Acoustic Emission and Machine Learning. Sensors, 23(20), 8356. https://doi.org/10.3390/s23208356