
Development and Testing of a Soft Exoskeleton Robotic Hand Training Device


Abstract
:1. Introduction
2. Materials and Methods
2.1. System Design Overview
- Constraints:
- –
- The maximum weight of the design would not exceed 800 g. The physiotherapists selected this value as the maximum weight at which a hand device would not fatigue the user during operation.
- –
- The maximum length of the wearable device would not exceed 30 cm, a value selected by the physiotherapists so that the device would not impede the movement of the hand and arm during operation.
- –
- An emergency stop would be readily available in the event of any need to interrupt the therapy exercise.
- Criteria:
- –
- Emulating natural range of motion (ROM) as closely as possible.
- –
- Adhering to all regulations established by regulating bodies for medical devices.
- –
- Minimizing the cost of manufacturing.
- –
- Easy to attach with a minimum setup time.
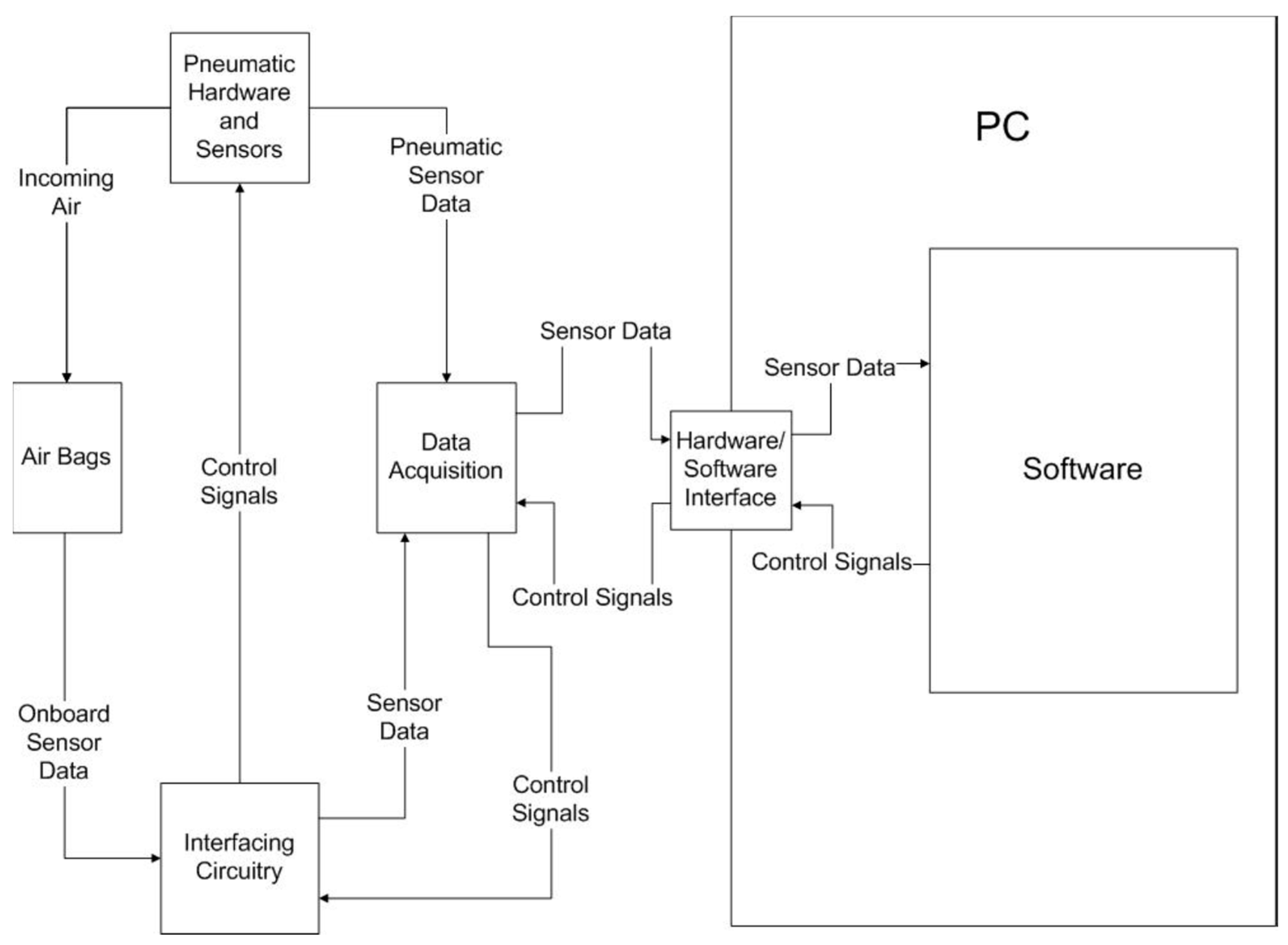
2.2. System Hardware Components
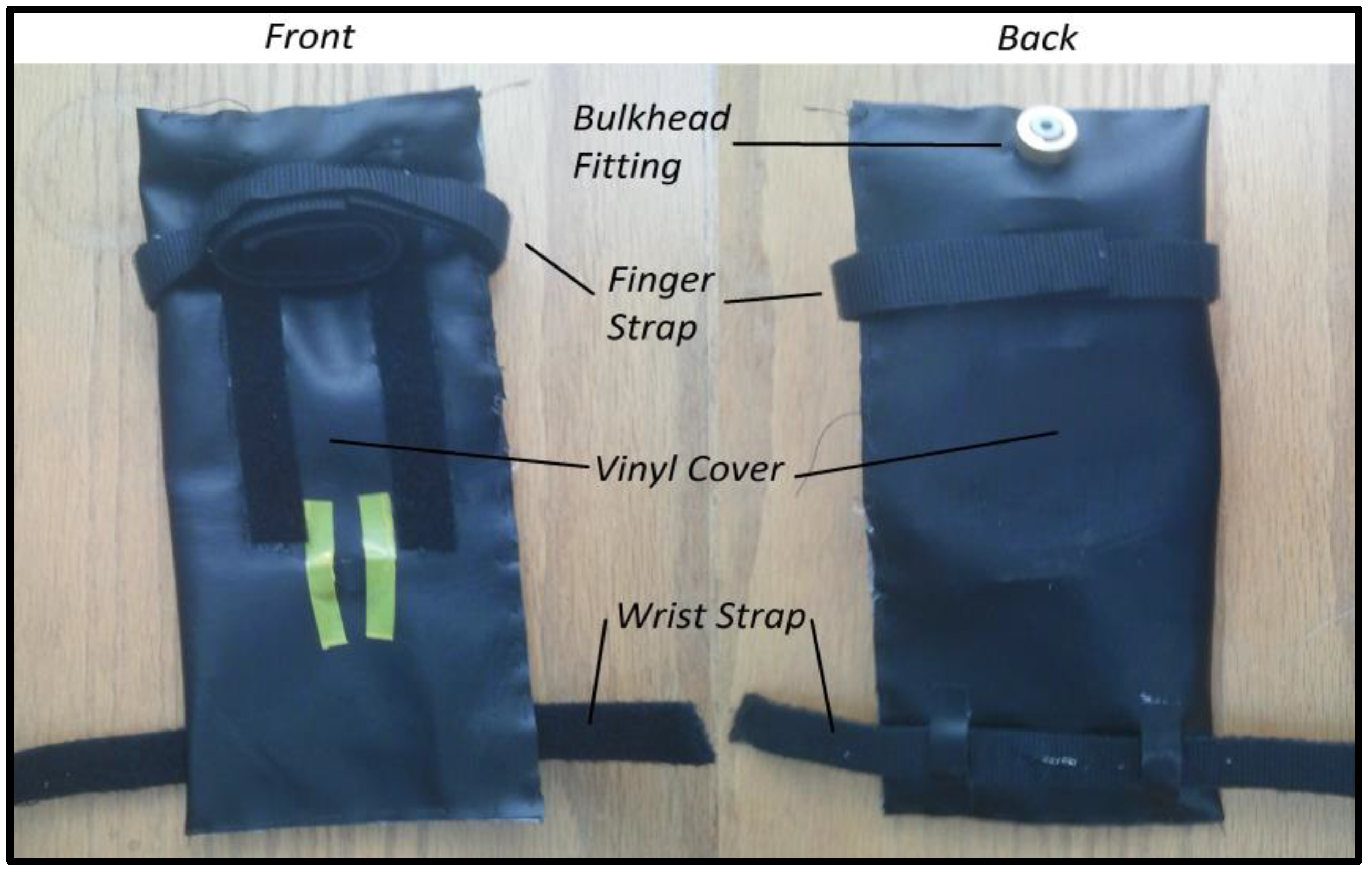
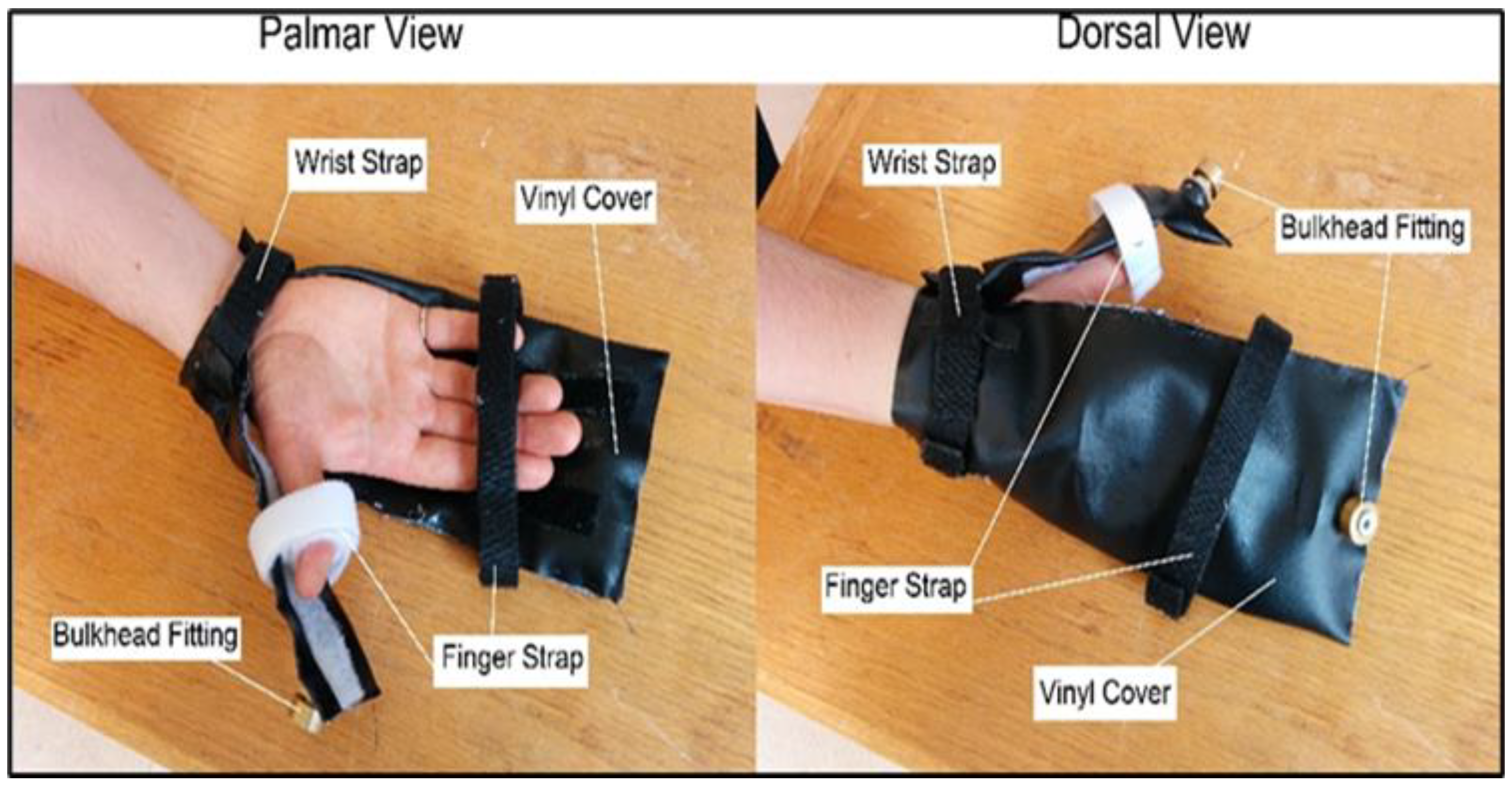
- Airbags: The airbags would be attached to the user’s hand and actuated to open them.
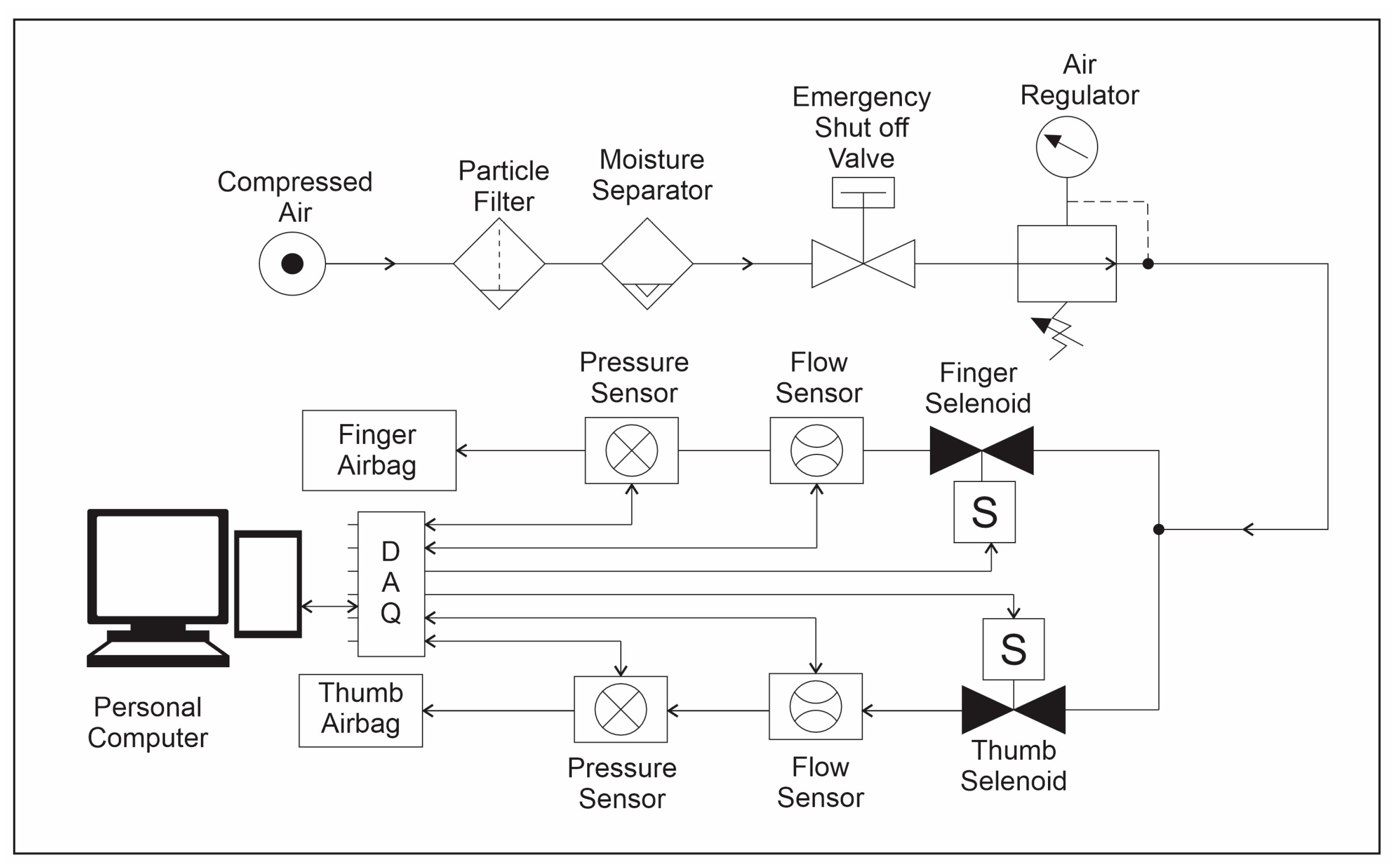
- Pneumatic Hardware and Sensors: These components monitor and control the airflow into the bags. They included a solenoid, airflow and pressure sensors, electro-pneumatic regulators, filters, and an emergency release valve. Data from the sensors within this module would be sent to the National Instrument Data Acquisition (DAQ) board to provide trial and safety information. Control signals regulating the airflow into the bag would be sent from the DAQ via the interfacing circuitry.
- Position Sensors: Two different types of position sensors were integrated into the system. The 3D pose Polhemus Patriot sensors and goniometers (flex sensors) were used in order to control the position of the fingers of the hand during operation.
- Interfacing Circuitry: The electric circuits of this module would control the pneumatic hardware. This circuitry also integrated the sensors and their signals with the main hardware modules of the other five system modules.
- Data Acquisition: This module would receive sensor data to be used by the software for system control and data gathering purposes. It would also send out control signals to the interfacing circuitry to control the pneumatic hardware.
2.2.1. Pneumatic Actuators and Position Sensors
- Finger airbag actuator: 26 cm × 12 cm;
- Thumb airbag actuator: 18.5 cm × 4.5 cm.
2.2.2. Pneumatic System Hardware Components
2.3. Software System
- Interface Level: This software level contains the graphical user interface (GUI) to allow users of the soft exoskeleton device to set up and initiate trial parameters. It interacted with the controller level by sending trial parameters and subject information to be used to initiate trials. The controller level sent updates to the interface level regarding the trial status during operation. The software user could also retrieve subject information from the system. The GUI will collect the following parameters: trial ID, type of training, date and time of the trial, number of repetitions, time of completion, and notes about the trial.
- Controller Level: This software level controls how the trials are executed. Based on the data sent from the interface, the trials are initiated, and their status is relayed to the system users. The controller level sends commands and data requests to the handler level to complete the trials.
- Handler Level: This software level contains three sub-modules that interface the software with the hardware and the database, as seen in Figure 6. The database handler receives commands from the controller level to read, write, query, and delete data in the database. The sensor handler gathers sensor data and sends it to the Controller Level for control. The air handler controls the valves that allow air to flow into the system for hand actuation.
2.4. Experimental Setup
Experimental Goals
- i.
- Ensure the system does not place the fingers at non-biomechanically compatible angles. This is needed to ensure that the system does not place the finger’s joints at any angles that do not fall within the normal joint ROM.
- ii.
- Ensure that the system is comfortable for the user. A qualitative survey was carried out to evaluate how comfortable the user felt the device was.
- iii.
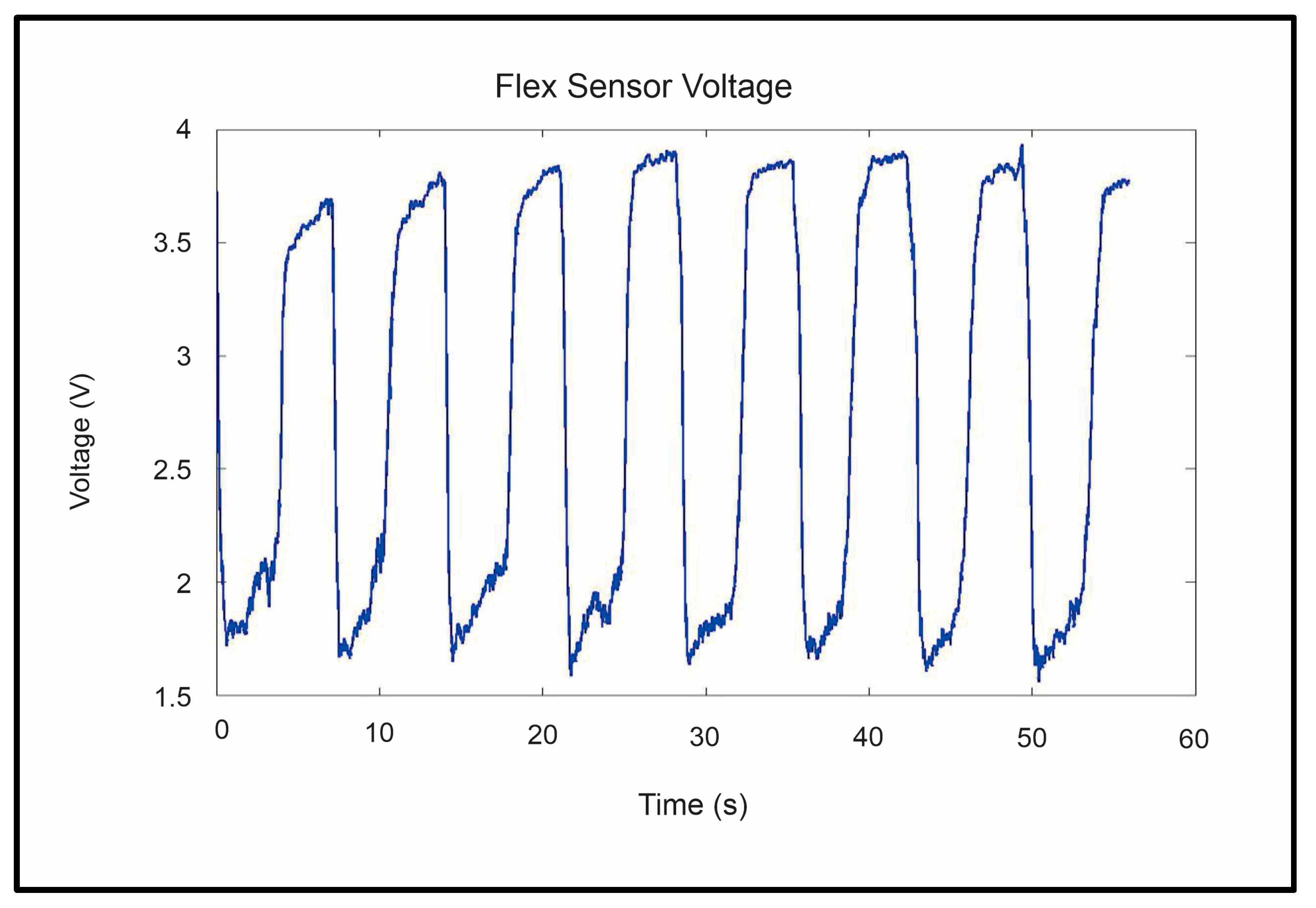
- Ensure the safety of the system with reliable and repeatable operation. The repeatability was measured by looking at the peak sensor values during operation to ensure that the device reached consistent sensor values throughout the experimental trials.
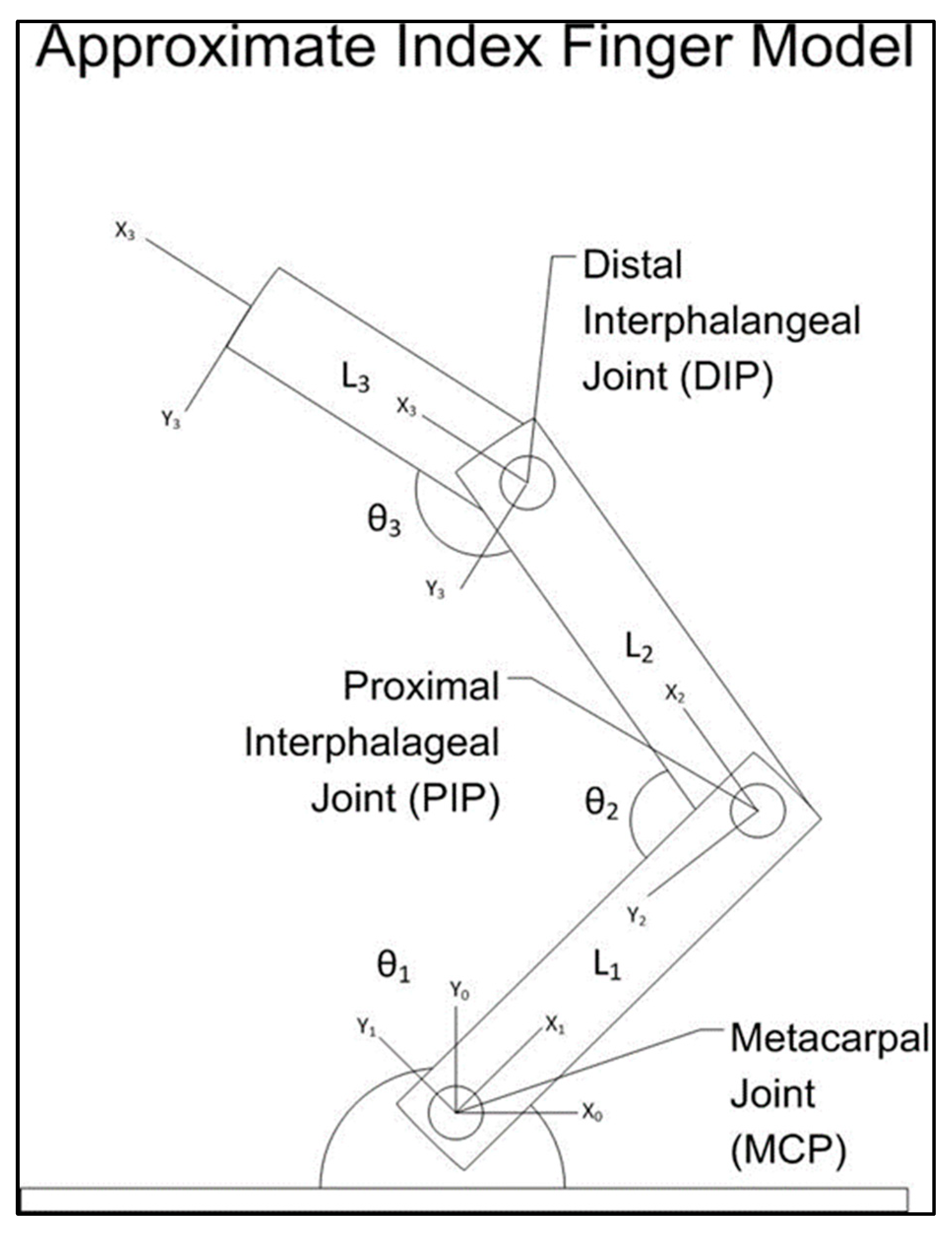
2.5. Biomechanical Model
2.6. Experimental Procedures
- The experiment’s objectives, procedure, and methodology were explained to each participant.
- Each subject provided consent to be part of the experiment. They also provided their respective information for the analysis.
- The position sensors were attached to the tip and base of the participant’s index finger. The finger bag actuator was then attached.
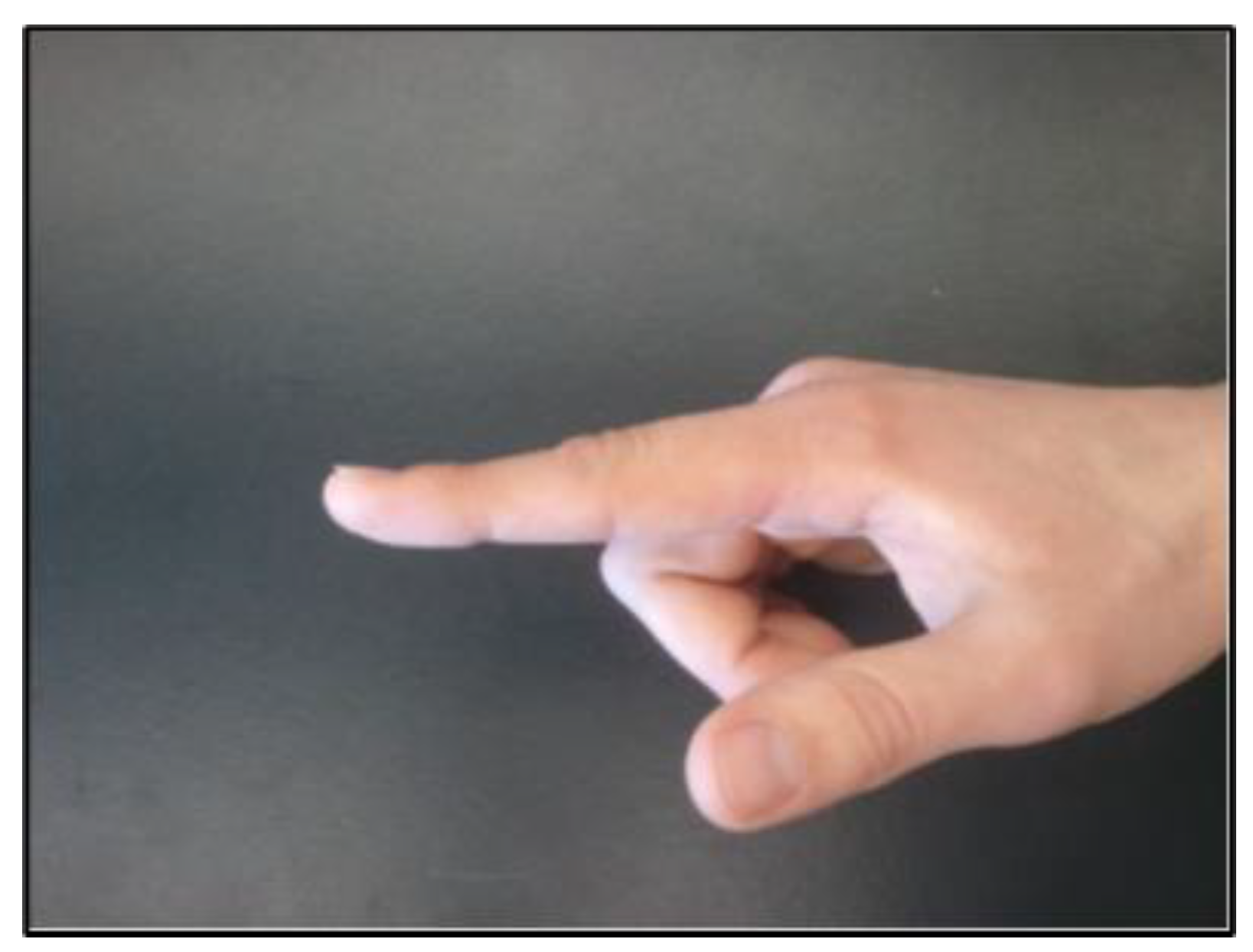
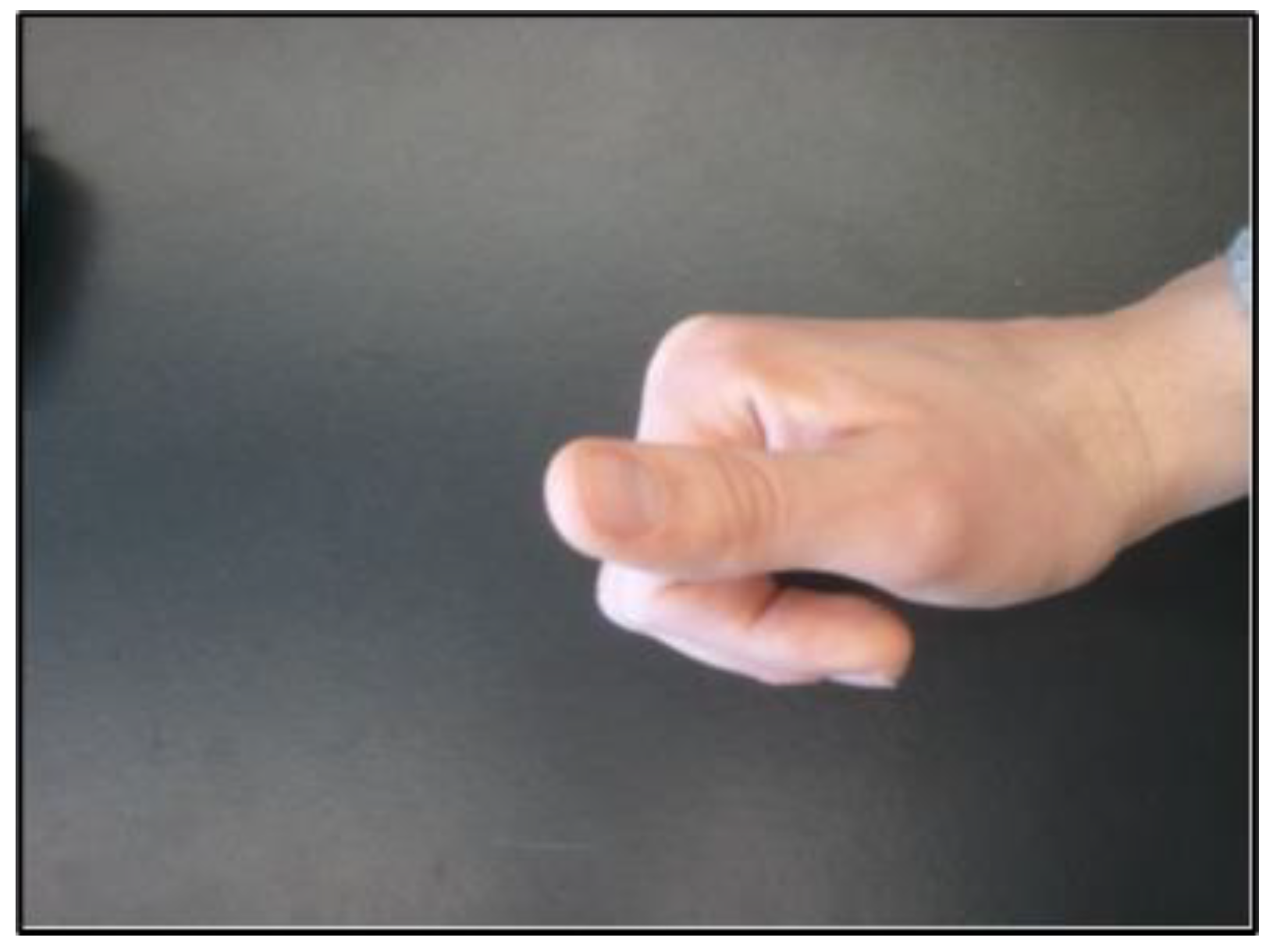
- With their arm resting on an armrest, the subject then placed their fingers in a flexed position.
- Once the subject was ready, the system was activated, and the finger and thumb bag actuators began to fill with air, pulling the fingers and thumb into extension.
- Once the fingers and thumbs reached the extension, air flow into the bag was stopped.
- This extension/flexion movement was repeated for a total of eight repetitions.
- The subject placed their arm back on the armrest and placed their thumb in a flexed position.
- At the end of the trial, each subject was issued a comfort survey to complete.
3. Results and Discussion
3.1. The Reliability of the Comfort Evaluation
3.2. Repeatability Analysis
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Moggio, L.; de Sire, A.; Marotta, N.; Demeco, A.; Ammendolia, A. Exoskeleton versus end-effector robot-assisted therapy for finger-hand motor recovery in stroke survivors: Systematic review and meta-analysis. Top Stroke Rehabil. 2022, 29, 539–550. [Google Scholar] [CrossRef] [PubMed]
- Rozevink, S.G.; van der Sluis, C.K.; Hijmans, J.M. Homecare arm rehabilitation (MERLIN): Preliminary evidence of long term effects of telerehabilitation using an unactuated training device on upper limb function after stroke. J. NeuroEng. Rehabil. 2021, 18, 141. [Google Scholar] [CrossRef] [PubMed]
- Molteni, F.; Gasperini, G.; Cannaviello, G.; Guanziroli, E. Exoskeleton and end-effector robots for upper and lower limbs rehabilitation: Narrative review. PM&R 2018, 10 (Suppl. S9), S174–S188. [Google Scholar] [CrossRef]
- Yue, Z.; Zhang, X.; Wang, J. Hand rehabilitation robotics on poststroke motor recovery. Behav. Neurol. 2017, 2017, 3908135. [Google Scholar] [CrossRef]
- Abdullah, H.A.; Tarry, C.; Lambert, C.; Barreca, S.; Allen, B.O. Results of clinicians using a therapeutic robotic system in an inpatient stroke rehabilitation unit. J. Neuroeng. Rehabil. 2011, 8, 50. [Google Scholar] [CrossRef]
- Krebs, H.I.; Hogan, N.; Aisen, M.L.; Volpe, B.T. Robot-Aided Neurorehabilitation. IEEE Trans. Neural Syst. Rehabil. Eng. 1998, 6, 75–87. [Google Scholar] [CrossRef] [PubMed]
- Krebs, H.I.; Dipietro, L.; Levy-Tzdek, S.; Fasoli, S.E.; Rykman-Berland, A.; Zipse, J.; Fawcett, J.A.; Stien, J.; Poizner, H.; Lo, A.C.; et al. Paradigm shift for rehabilitation robotics. IEEE Eng. Med. Biol. Mag. 2008, 27, 61–70. [Google Scholar] [CrossRef]
- Pignolo, L. Robotics in neuro-rehabilitation. J. Rehabil. Med. 2009, 41, 955–960. [Google Scholar] [CrossRef] [PubMed]
- Kabir, R.; Sunny, M.S.H.; Ahmed, H.U.; Rahman, M.H. Hand Rehabilitation Devices: A Comprehensive Systematic Review. Micromachines 2022, 13, 1033. [Google Scholar] [CrossRef] [PubMed]
- Aggogeri, F.; Mikolajczyk, T.; O’Kane, J. Robotics for rehabilitation of hand movement in stroke survivors. Adv. Mech. Eng. 2019, 11, 1687814019841921. [Google Scholar] [CrossRef]
- Bos, R.A.; Haarman, C.J.; Stortelder, T.; Nizamis, K.; Herder, J.L.; Stienen, A.H.; Plettenburg, D.H. A structured overview of trends and technologies used in dynamic hand orthoses. J. NeuroEng. Rehabil. 2016, 13, 1–25. [Google Scholar] [CrossRef] [PubMed]
- Heo, P.; Gu, G.M.; Lee, S.; Rhee, K.; Kim, J. Current hand exoskeleton technologies for rehabilitation and assistive engineering. Int. J. Precis Eng. Manuf. 2012, 13, 807–824. [Google Scholar] [CrossRef]
- Yamaura, H.; Matsushita, K.; Kato, R.; Yokoi, H.Y. Development of Hand Rehabilitation System Using Wire-Driven Link Mechanism for Paralysis Patients. In Proceedings of the International Conference on Robotics and Biomimetics, Guilin, China, 19–23 December 2009. [Google Scholar]
- Park, Y.; Jo, I.; Bae, J. Development of a Dual-Cable Hand Exoskeleton System for virtual reality. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar]
- Cherian, B.; Dominic, C.; Vysakh, G.; Vishakh, K.R. Exo-Glove: A Soft Wearable Robotic Hand for Stroke Survivors. Int. Res. J. Eng. Technol. 2018, 5, 3358–3364. [Google Scholar]
- Dovat, L.; Lambercy, O.; Gassert, R.; Maeder, T.; Milner, T.; Leong, T.C.; Burdet, E. HandCARE: A cable-actuated rehabilitation system to train hand function after stroke. IEEE Trans. Neural. Syst. Rehabil. Eng. 2008, 16, 582–591. [Google Scholar] [CrossRef] [PubMed]
- Borboni, A.; Mor, M.; Faglia, R. Gloreha—Hand Robotic Rehabilitation: Design, Mechanical Model, and Experiments. J. Dyn. Syst. Meas. Control Trans. ASME 2016, 138, 111003. [Google Scholar] [CrossRef]
- Kayyali, R.; Alamri, A.; Eid, M.; Iglesias, R.; Shirmohammadi, S.; Saddik, A.E.; Lemaire, E. Occupational Therapists’ evaluation of haptic motor rehabilitation. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 22–26 August 2007; pp. 4763–4766. [Google Scholar]
- In, H.K.; Cho, K.J. Evaluation of the antagonistic tendon driven system for SNU Exo-Glove. In Proceedings of the International Conference on Ubiquitous Robots and Ambient Intelligence, Daejeon, Republic of Korea, 30 October–2 November 2013; Volume 60, pp. 507–509. [Google Scholar]
- Amin, H.; Assal, S.F.M.; Iwata, H.A. new hand rehabilitation system based on the cable-driven mechanism and die-lectric elastomer actuator. Mech. Sci. 2020, 11, 357–369. [Google Scholar] [CrossRef]
- Balasubramanian, S.; Klein, J.; Burdet, E. Robot-assisted rehabilitation of hand function. Curr. Opin. Neurol. 2010, 23, 661–670. [Google Scholar] [CrossRef] [PubMed]
- Wolf, S.L.; Sahu, K.; Bay, R.C.; Buchanan, S.; Reiss, A.; Linder, S.; Rosenfeldt, A.; Alberts, J. The HAAPI (Home Arm Assistance Progression Initiative) Trial: A Novel Robotics Delivery Approach in Stroke Rehabilitation. Neurorehabil. Neural Repair. 2015, 29, 958–968. [Google Scholar] [CrossRef] [PubMed]
- Hesse, S.; Kuhlmann, H.; Wilk, J.; Tomelleri, C.; Kirker, S.G. A new electromechanical trainer for sensorimotor rehabilitation of paralysed fingers: A case series in chronic and acute stroke patients. J. NeuroEng. Rehabil. 2008, 5, 1–6. [Google Scholar] [CrossRef] [PubMed]
- Connelly, L.; Stoykov, M.E.; Jia, Y.; Toro, M.L.; Kenyon, R.V.; Kamper, D.G. Use of a Pneumatic Glove for Hand Rehabilitation Following Stroke. In Proceedings of the 31st Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 3–6 September 2009; pp. 2434–2437. [Google Scholar]
- Barria, P.; Riquelme, M.; Reppich, H.; Cisnal, A.; Fraile, J.; Sierra, D.; Aguilar, R.; Andrade, A. Hand rehabilitation based on the RobHand exoskeleton in stroke patients: A case series study. Front. Robot. AI 2023, 10, 1146018. [Google Scholar] [CrossRef] [PubMed]
- Alhamad, R.; Seth, N.; Abdullah, H.A. Initial Testing of Robotic Exoskeleton Hand Device for Stroke Rehabilitation. Sensors 2023, 23, 6339. [Google Scholar] [CrossRef] [PubMed]
- Donelson, S.M.; Gordon, C.C.; Matched Anthropometric Database of U.S. Marine Corps Personnel: Summary Statistics 1995. United States Army Soldier Systems Command Natick Research, Development and Engineering Center. 1996. Available online: https://apps.dtic.mil/sti/pdfs/ADA316646.pdf (accessed on 20 July 2023).
- Craig, J.J. Introduction to Robotics: Mechanics and Control; Pearson Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Measured Angles (MCP, PIP, DIP) (°) | Predicted Angles (MCP, PIP, DIP) (°) | Absolute Error (MCP, PIP, DIP) (°) |
|---|---|---|---|
| 1 | 90, 0, 0 | 87.5, 2.77, 0 | 2.5, 2.77, 0 |
| 170, 80, 0 | 177.0, 81.5, 0 | 7.0, 1.5, 0 | |
| 2 | 90, 0, 0 | 91.5, 9.83, 0 | 1.5, 9.83, 0 |
| 170, 80, 0 | 167.5, 77.23, 0 | 2.5, 2.77, 0 | |
| 3 | 90, 0, 0 | 90.5, 6.99, 0 | 0.5, 6.99, 0 |
| 170, 80, 0 | 168.0, 77.46, 0 | 2.0, 2.54, 0 | |
| 4 | 90, 0, 0 | 88.0, 3.43, 0 | 2.0, 3.43, 0 |
| 170, 80, 0 | 169.0, 78.42, 0 | 1.0, 1.58, 0 | |
| 5 | 90, 0, 0 | 93, 14.57, 0 | 3, 14.57, 0 |
| 170, 80, 0 | 176.0, 86.3, 0 | 6.0, 6.32, 0 | |
| Average Absolute Error | Position 1: 1.9, 7.5, 0 | Position 2: 3.7, 2.9, 0 |
| Subject | Measured Position (X, Y) (cm) | Predicted Position (X, Y) (cm) | Absolute Error (X, Y) (cm) |
|---|---|---|---|
| 1 | 0.164, 11.924 | 0.168, 11.158 | 0.004, 0.766 |
| −5.952, −6.589 | −5.879, −6.220 | 0.073, 0.369 | |
| 2 | −1.196, 9.785 | −1.345, 10.298 | 0.149, 0.513 |
| −6.559, −4.574 | −6.710, −4.806 | 0.151, 0.232 | |
| 3 | −1.015, 11.552 | −0.847, 10.283 | 0.168, 1.269 |
| −7.019, −5.795 | −6.610, −4.801 | 0.409, 0.994 | |
| 4 | −0.136, 12.952 | 0.089, 11.799 | 0.047, 1.153 |
| −7.371, −4.765 | −7.592, −5.200 | 0.221, 0.435 | |
| 5 | −1.984, 10.276 | −2.192, 10.966 | 0.208, 0.690 |
| −5.89, −7.681 | −5.672, −6.070 | 0.218, 1.611 | |
| Average Absolute Error | Position 1: 0.115, 0.878 | Position 2: 0.215, 0.728 |
| Gender | N | Mean | Std Dev | Std Err | Min | Max |
|---|---|---|---|---|---|---|
| 0 | 16 | 8.875 | 1.2042 | 0.301 | 6 | 10 |
| 1 | 14 | 9.25 | 0.8026 | 0.2145 | 7.5 | 10 |
| Diff. (1–2) | −0.375 | 1.0373 | 0.3796 | |||
| Method | Variances | DF | t Value | Pr > |t| | ||
| Pooled | Equal | 28 | −0.99 | 0.3317 | ||
| Satterthwaite | Unequal | 26.282 | −1.01 | 0.3196 | ||
| Equality of Variances | ||||||
| Method | Num DF | Den DF | F Value | Pr > F | ||
| Folded F | 15 | 13 | 2.25 | 0.1494 |
| Kruskal–Wallis Test | |
|---|---|
| Chi-Square | 2.4715 |
| DF | 1 |
| Pr ≥ Chi-Square | 0.1159 |
| Source | DF | Sum of Squares | Mean Square | F Value | Pr ≥ F |
|---|---|---|---|---|---|
| Model | 7 | 0.12906 | 0.01844 | 0.18 | 0.9887 |
| Error | 232 | 23.3871 | 0.10081 | ||
| Corrected Total | 239 | 23.5161 |
| Source | DF | Sum of Squares | Mean Square | F Value | Pr ≥ F |
|---|---|---|---|---|---|
| Model | 7 | 0.00375 | 0.00054 | 0 | 1 |
| Error | 232 | 25.6016 | 0.11035 | ||
| Corrected Total | 239 | 25.6054 |
| Sensor | Finger Bag | Thumb Bag |
|---|---|---|
| Flex Sensor | 88.00% | 99.40% |
| Flow Sensor | 89.50% | 97.80% |
| Pressure Sensor | 97.80% | 98.90% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jackson, G.; Abdullah, H.A. Development and Testing of a Soft Exoskeleton Robotic Hand Training Device. Sensors 2023, 23, 8395. https://doi.org/10.3390/s23208395
Jackson G, Abdullah HA. Development and Testing of a Soft Exoskeleton Robotic Hand Training Device. Sensors. 2023; 23(20):8395. https://doi.org/10.3390/s23208395
Chicago/Turabian StyleJackson, Gregory, and Hussein A. Abdullah. 2023. "Development and Testing of a Soft Exoskeleton Robotic Hand Training Device" Sensors 23, no. 20: 8395. https://doi.org/10.3390/s23208395
APA StyleJackson, G., & Abdullah, H. A. (2023). Development and Testing of a Soft Exoskeleton Robotic Hand Training Device. Sensors, 23(20), 8395. https://doi.org/10.3390/s23208395