

Object Detection in Adverse Weather for Autonomous Driving through Data Merging and YOLOv8

Abstract
:1. Introduction
1.1. Object Detection
1.2. Relevant Datasets
1.3. Current Study
2. Methodology
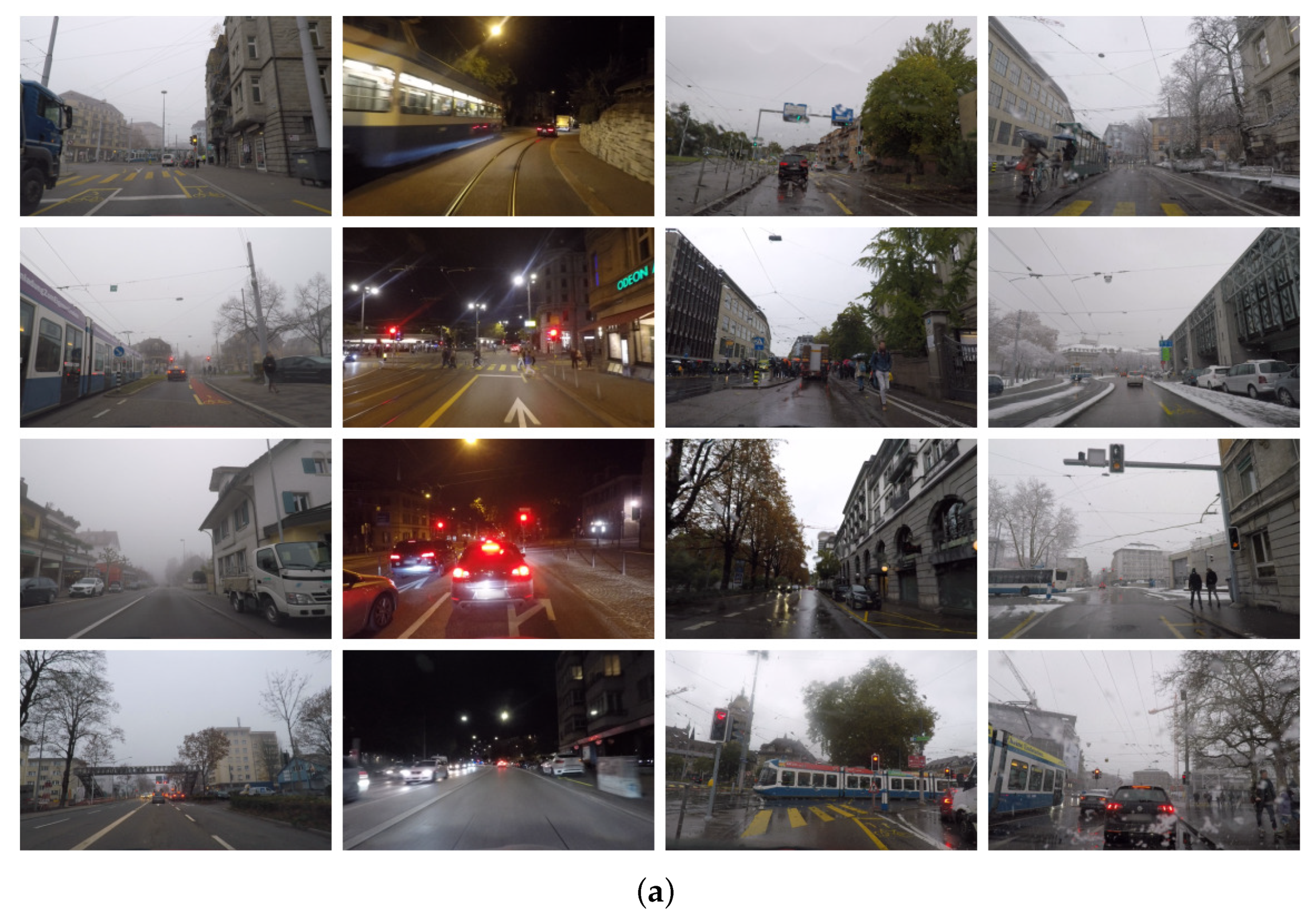
2.1. Data Collection and Annotation
2.2. Data Processing and Merging
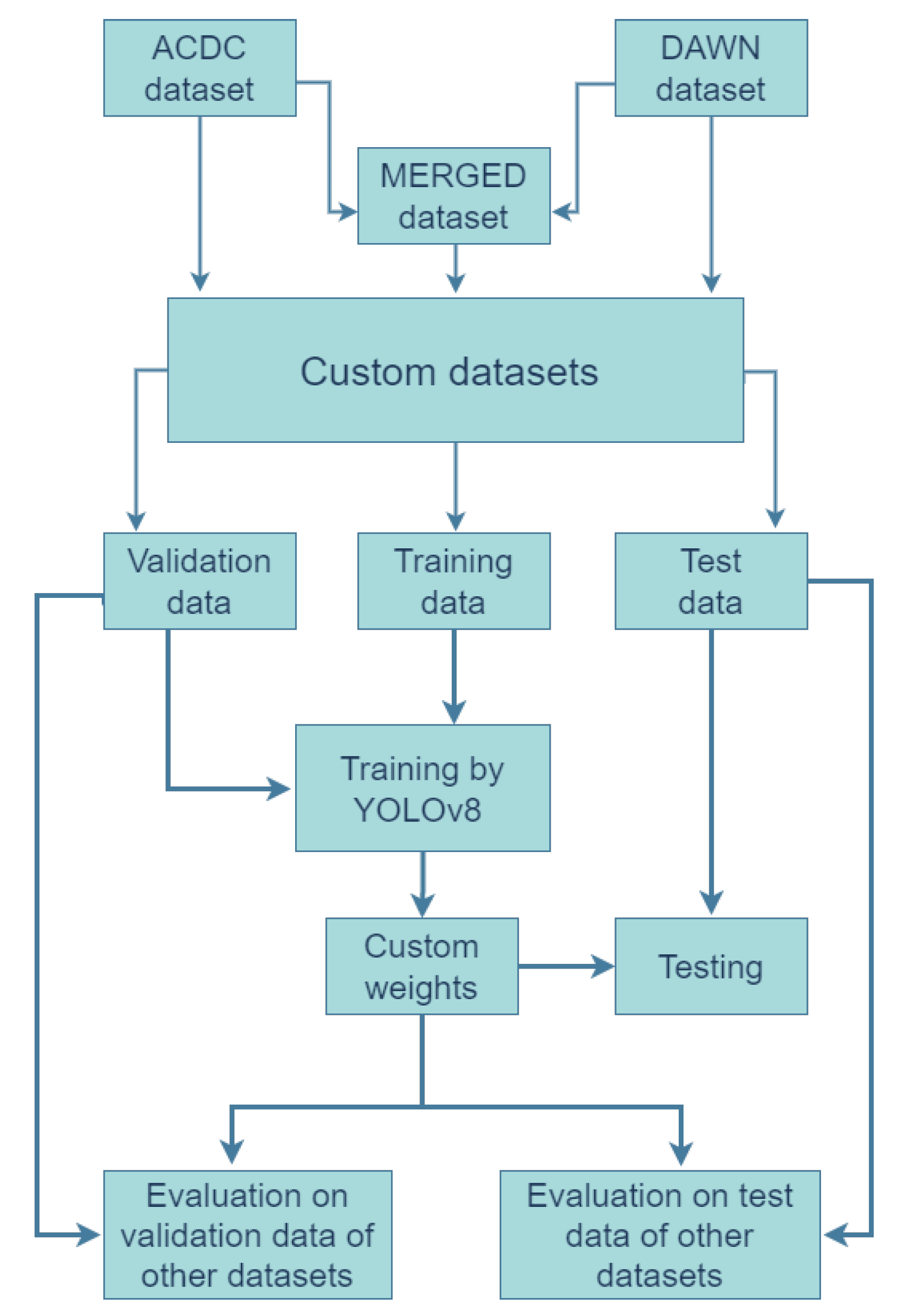
2.3. Training and Evaluation
3. Experiments, Results, and Discussion
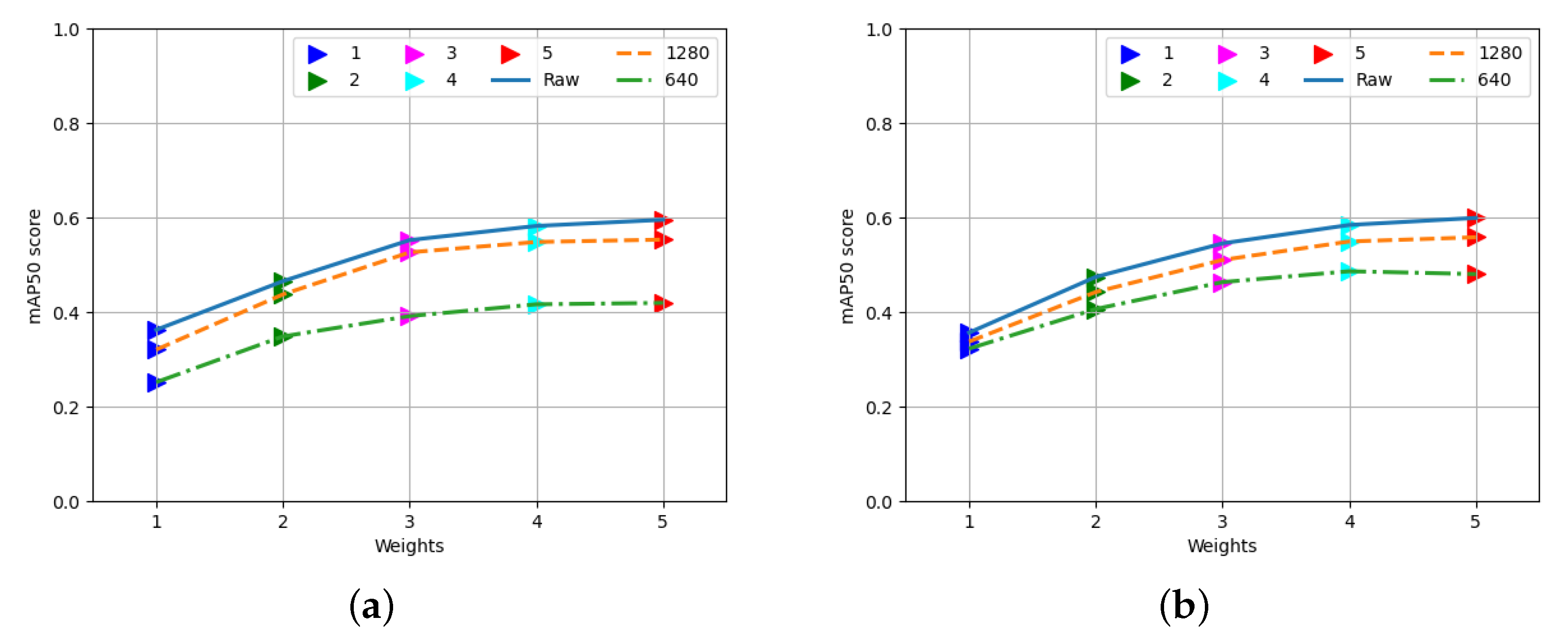
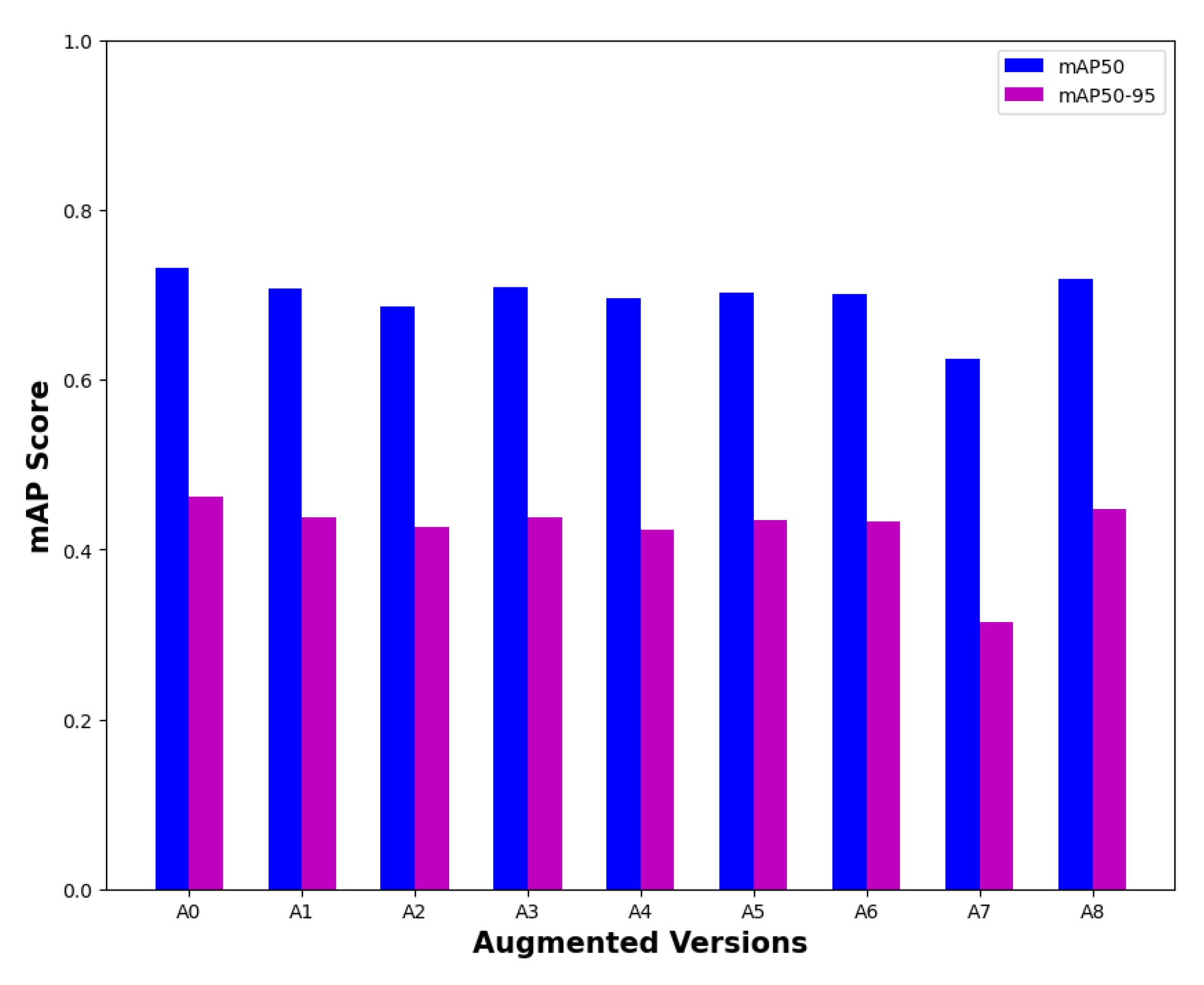
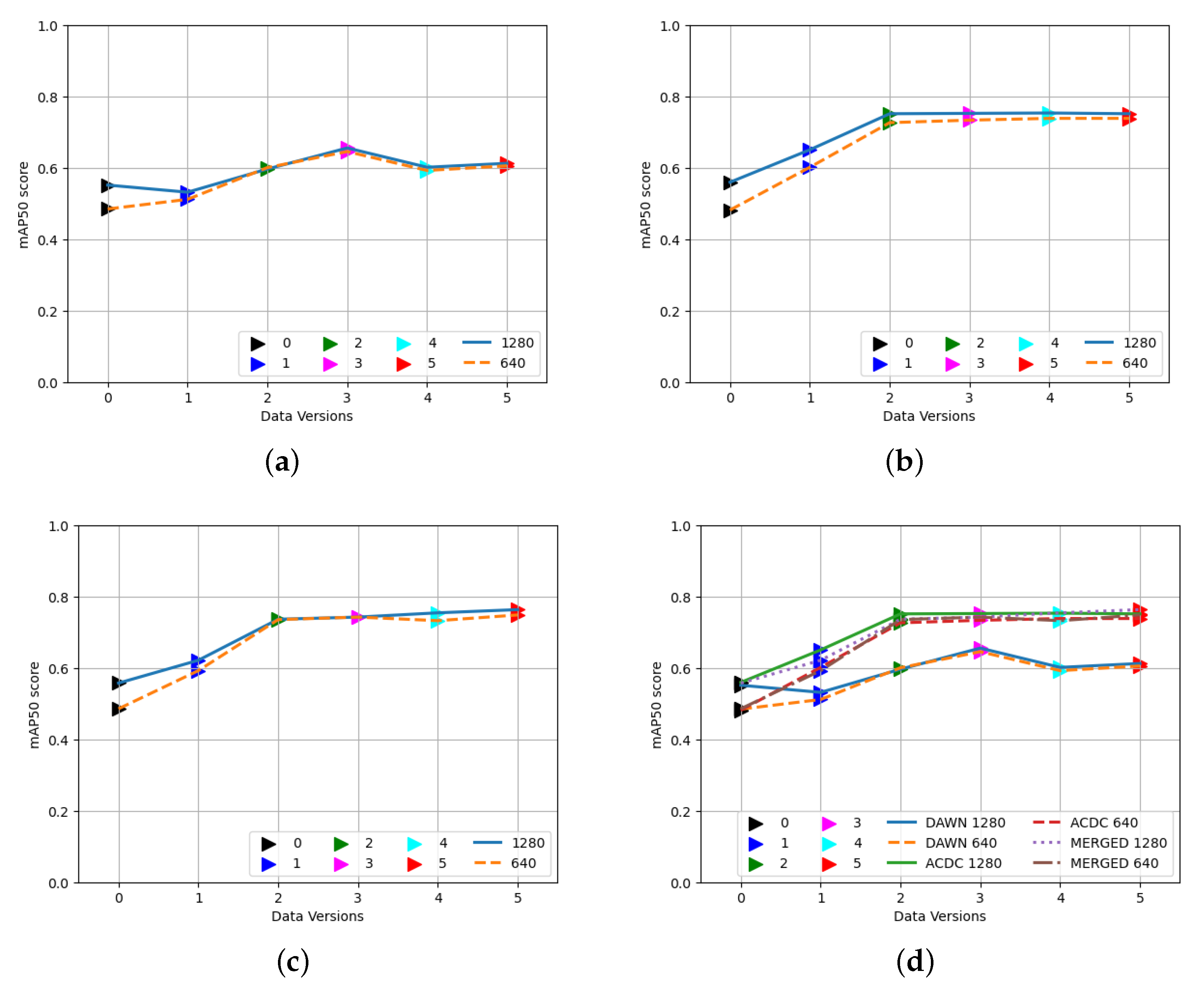
3.1. Choosing the Best Weights and Augmentation
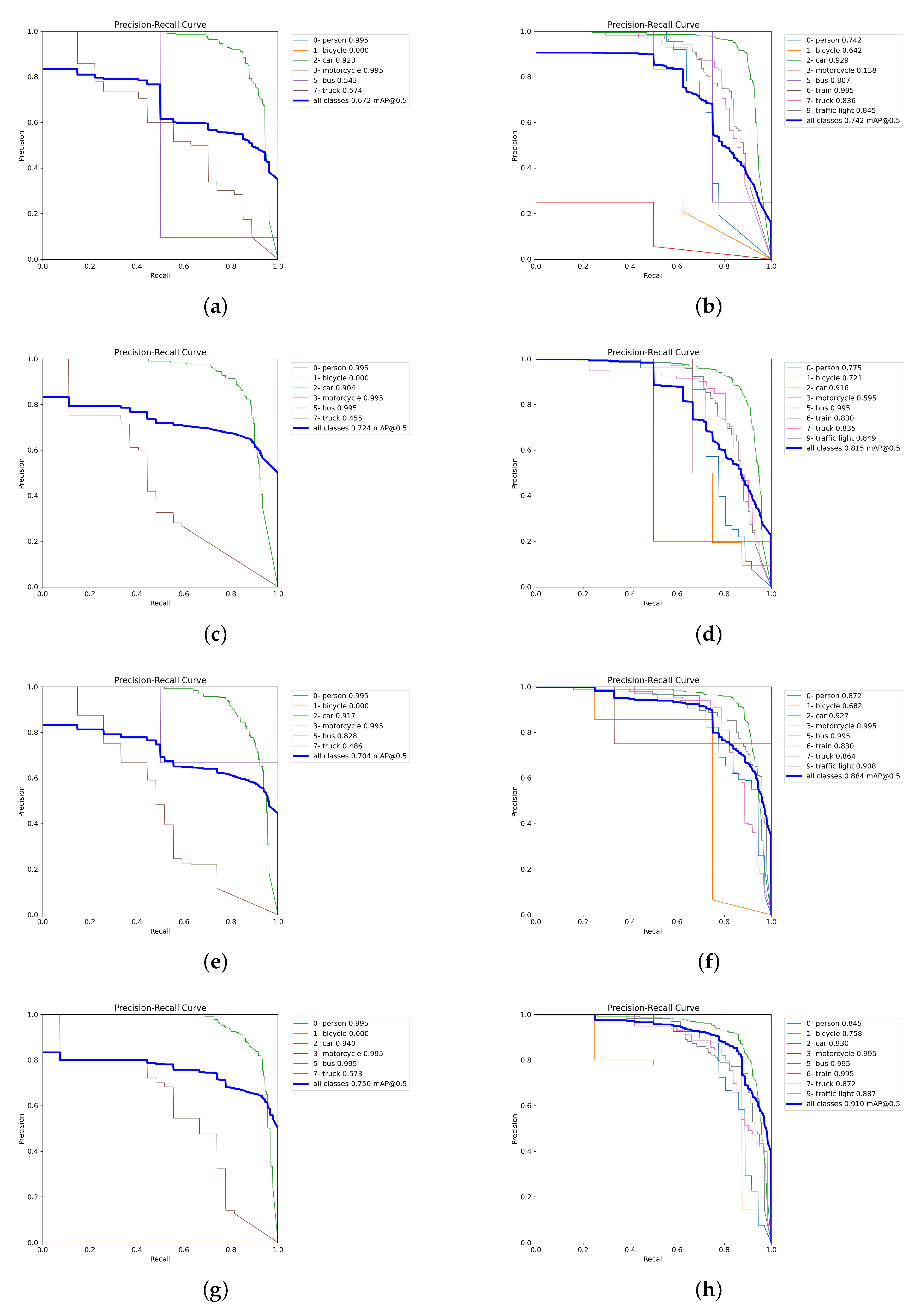
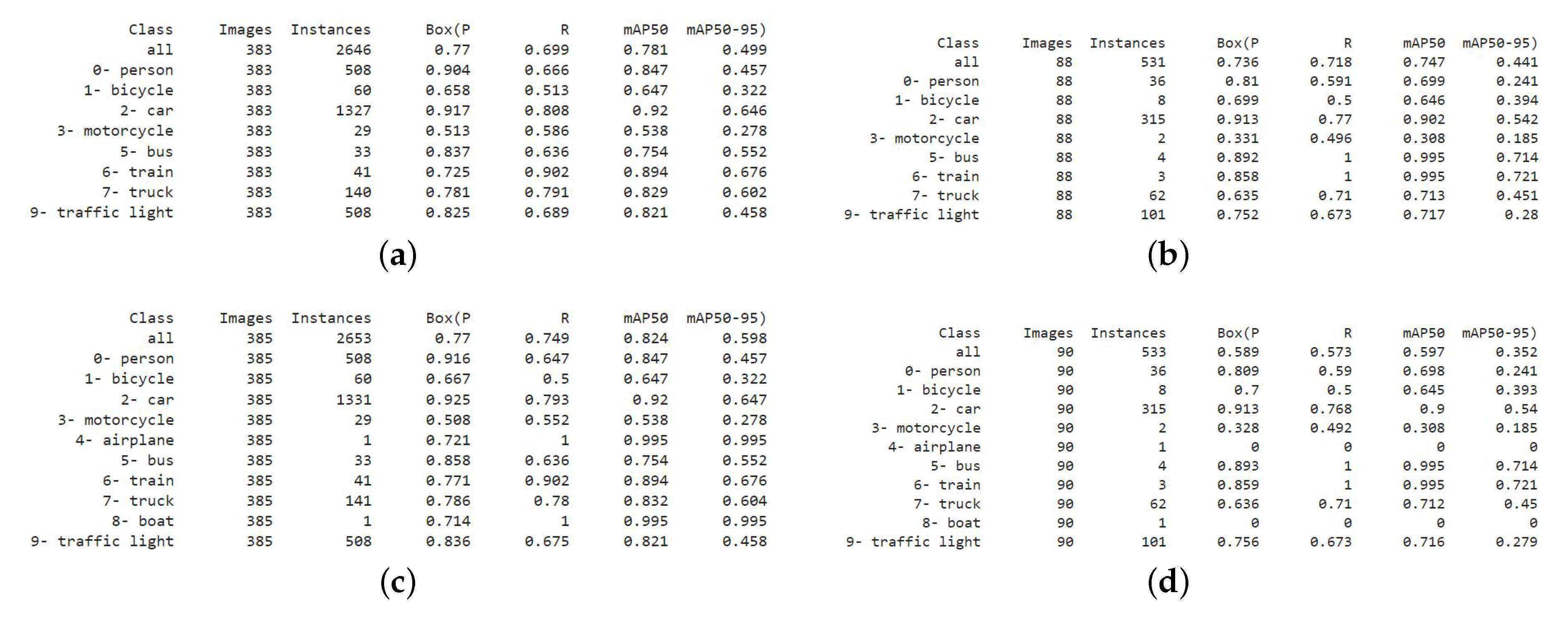
3.2. Evaluation of Weights Training on the DAWN, ACDC, and MERGED Datasets
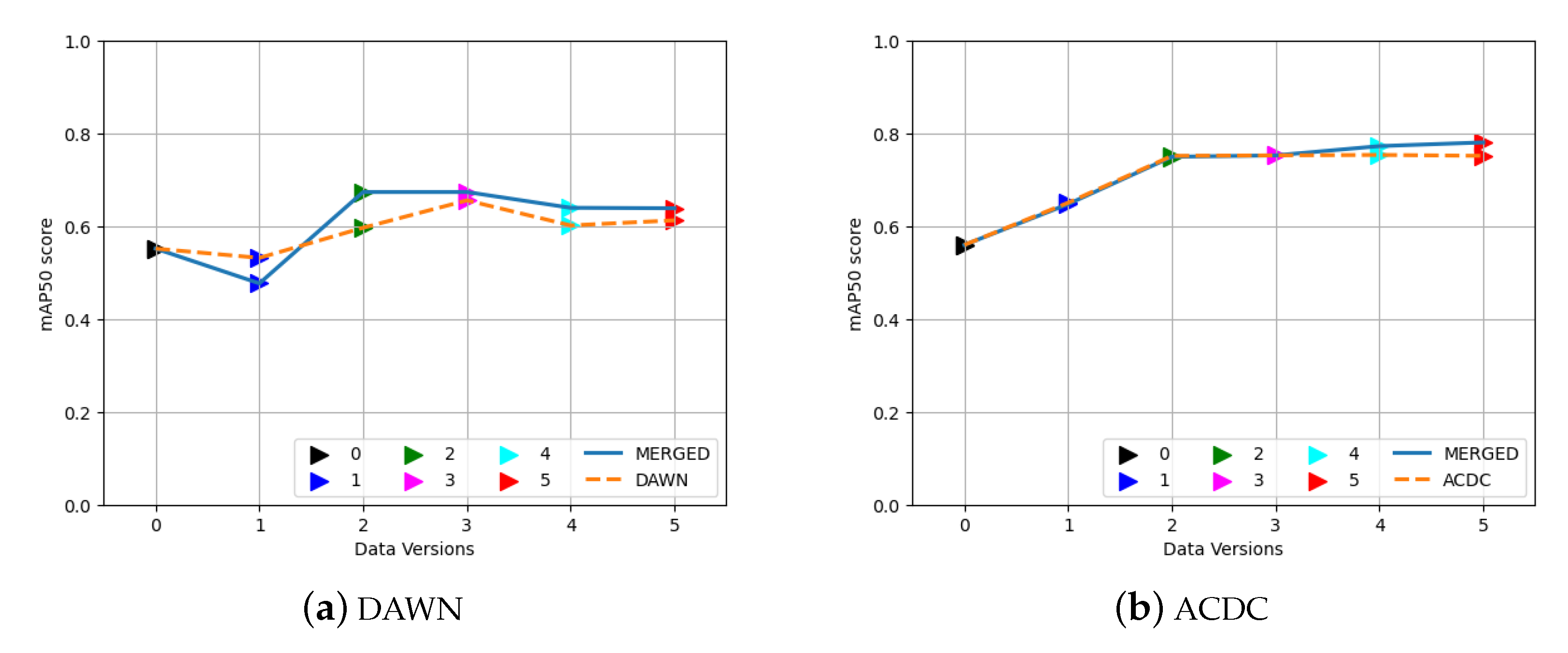
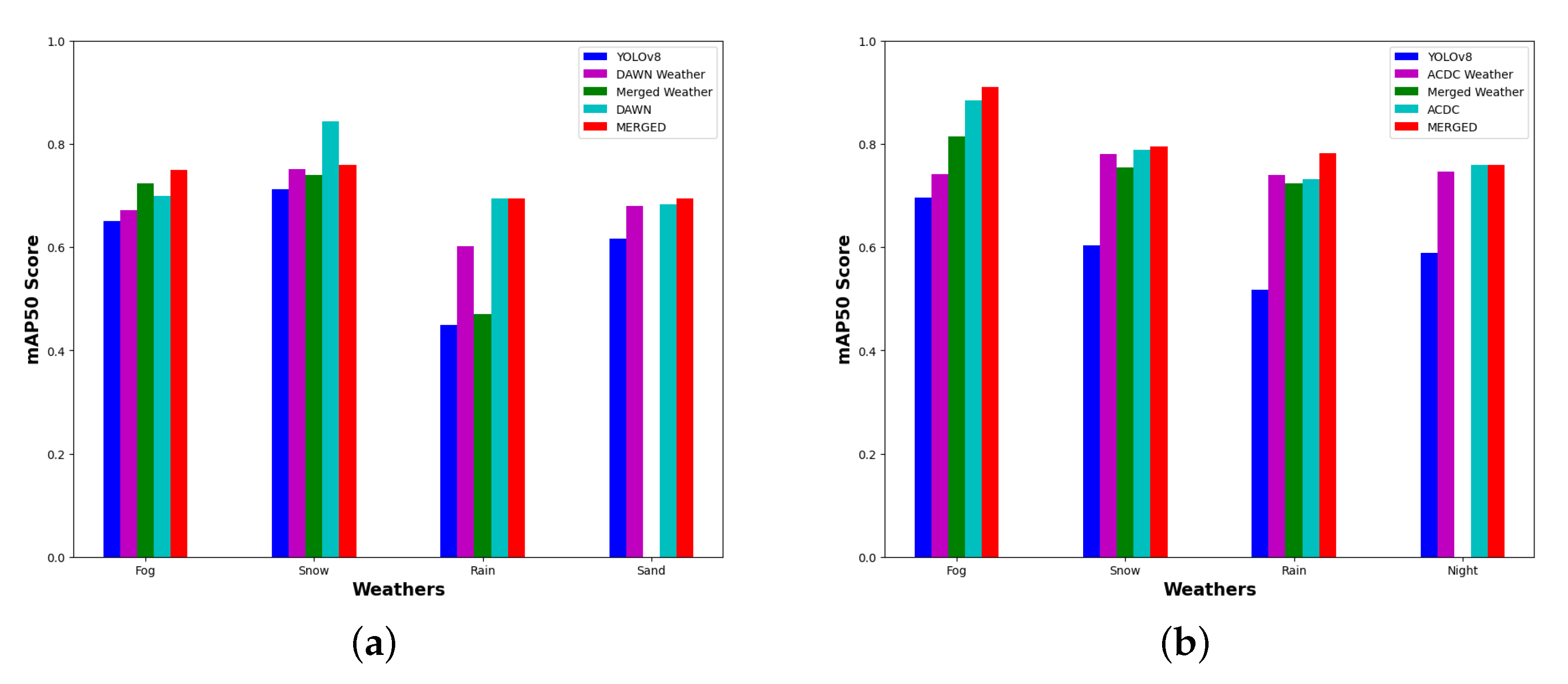
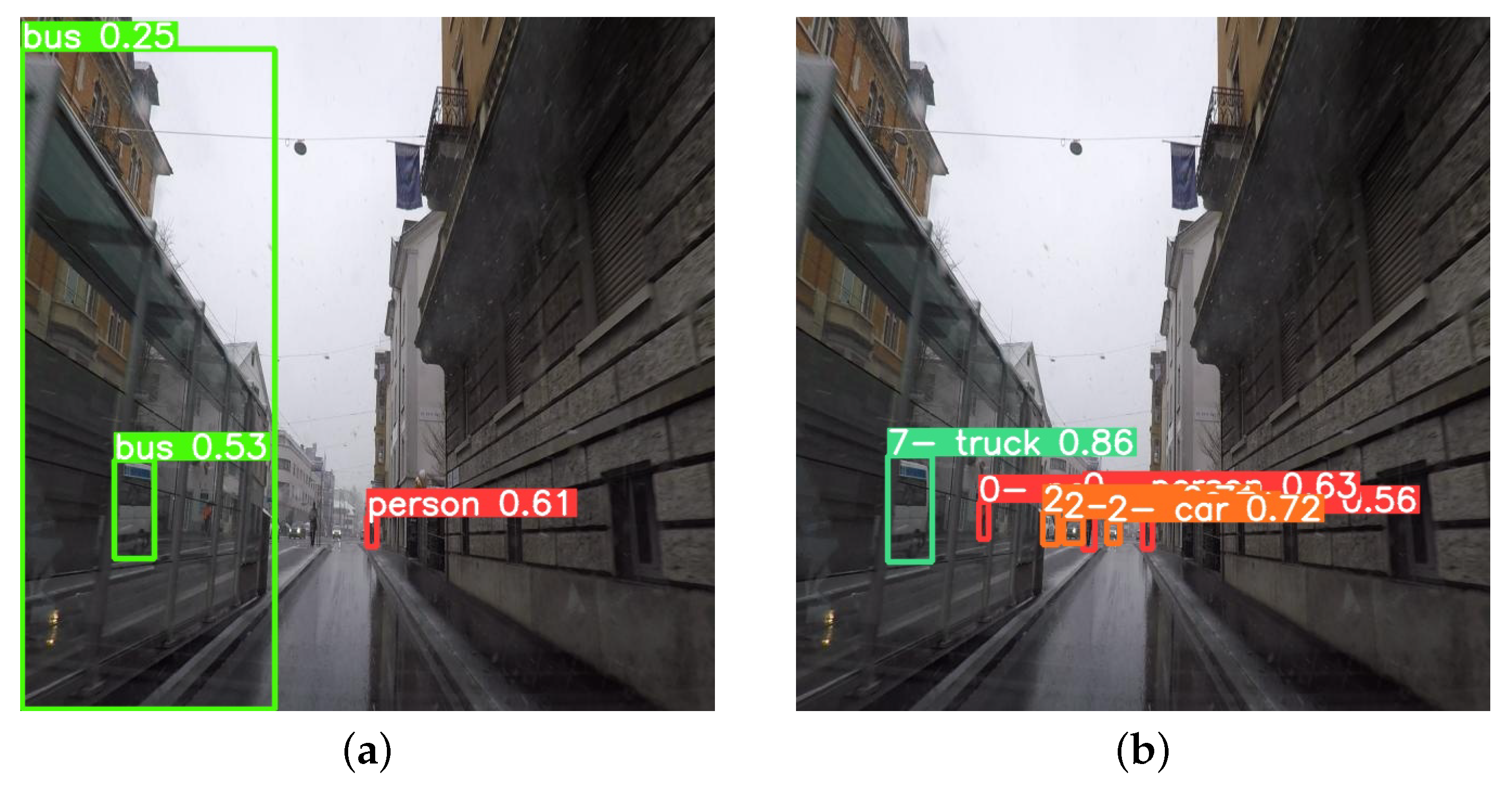
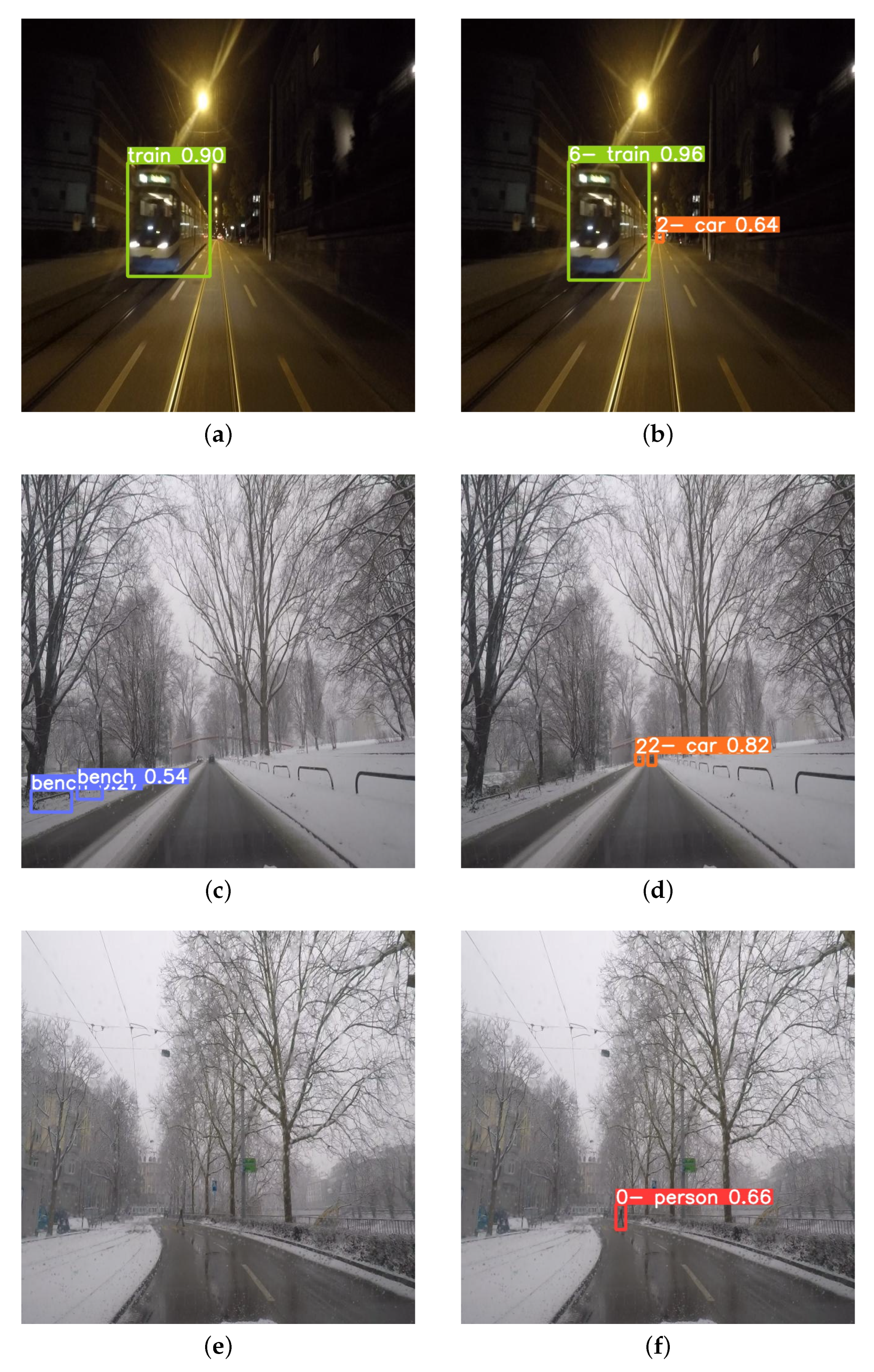
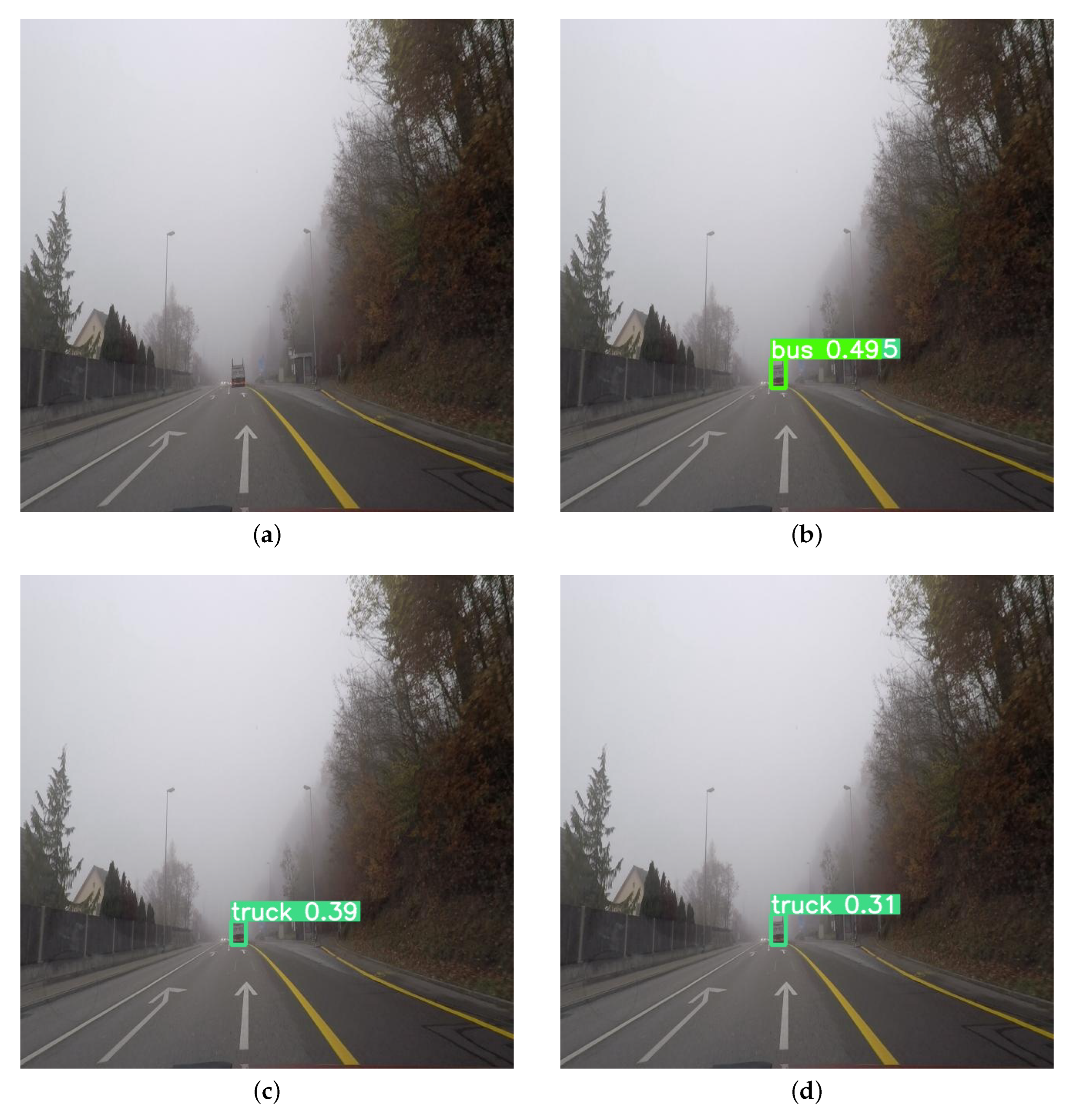
3.3. Effects of the MERGED Dataset on the DAWN and ACDC Dataset
4. Limitations and Future Works
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A








References
- Taxonomy and Definitions for Terms Related to Driving Automation Systems for On-Road Motor Vehicles (J3016B). 2018. Available online: https://www.sae.org/standards/content/j3016_201806/ (accessed on 10 October 2023).
- Zhang, Y.; Carballo, A.; Yang, H.; Takeda, K. Perception and Sensing for Autonomous Vehicles under Adverse Weather Conditions: A Survey. ISPRS J. Photogramm. Remote Sens. 2023, 196, 146–177. [Google Scholar] [CrossRef]
- Bijelic, M.; Gruber, T.; Mannan, F.; Kraus, F.; Ritter, W.; Dietmayer, K.; Heide, F. Seeing through Fog without Seeing Fog: Deep Multimodal Sensor Fusion in Unseen Adverse Weather. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Lee, U.; Jung, J.; Shin, S.; Jeong, Y.; Park, K.; Shim, D.H.; Kweon, I.S. EureCar Turbo: A Self-Driving Car That Can Handle Adverse Weather Conditions. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Qian, K.; Zhu, S.; Zhang, X.; Li, L.E. Robust Multimodal Vehicle Detection in Foggy Weather Using Complementary Lidar and Radar Signals. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Mohammed, A.S.; Amamou, A.; Ayevide, F.K.; Kelouwani, S.; Agbossou, K.; Zioui, N. The perception system of intelligent ground vehicles in all weather conditions: A systematic literature review. Sensors 2020, 20, 6532. [Google Scholar] [CrossRef] [PubMed]
- Tao, N.; Xiangkun, J.; Xiaodong, D.; Jinmiao, S.; Ranran, L. Vehicle Detection Method with Low-Carbon Technology in Haze Weather Based on Deep Neural Network. Int. J. Low-Carbon Technol. 2022, 17, 1151–1157. [Google Scholar] [CrossRef]
- Tumas, P.; Nowosielski, A.; Serackis, A. Pedestrian Detection in Severe Weather Conditions. IEEE Access 2020, 8, 62775–62784. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Li, G.; Yang, Y.; Qu, X. Deep Learning Approaches on Pedestrian Detection in Hazy Weather. IEEE Trans. Ind. Electron. 2020, 67, 8889–8899. [Google Scholar] [CrossRef]
- Lan, W.; Dang, J.; Wang, Y.; Wang, S. Pedestrian Detection Based on YOLO Network Model. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Choi, J.; Chun, D.; Kim, H.; Lee, H.J. Gaussian YOLOv3: An Accurate and Fast Object Detector Using Localization Uncertainty for Autonomous Driving. In Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision (ICCV), Seoul, Republic of Korea, 27 October–2 November 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Song, R.; Wetherall, J.; Maskell, S.; Ralph, J. Weather Effects on Obstacle Detection for Autonomous Car. In Proceedings of the 6th International Conference on Vehicle Technology and Intelligent Transport Systems, Prague, Czech Republic, 2–4 May 2020; SCITEPRESS—Science and Technology Publications: Setúbal, Portugal, 2020. [Google Scholar]
- Huang, S.C.; Le, T.H.; Jaw, D.W. DSNet: Joint Semantic Learning for Object Detection in Inclement Weather Conditions. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 43, 2623–2633. [Google Scholar] [CrossRef] [PubMed]
- Qin, Q.; Chang, K.; Huang, M.; Li, G. DENet: Detection-driven Enhancement Network for Object Detection under Adverse Weather Conditions. In Proceedings of the Asian Conference on Computer Vision, Macau, China, 4–8 December 2022; pp. 2813–2829. [Google Scholar]
- Pham, L.H.; Tran, D.N.N.; Jeon, J.W. Low-Light Image Enhancement for Autonomous Driving Systems Using DriveRetinex-Net. In Proceedings of the 2020 IEEE International Conference on Consumer Electronics—Asia (ICCE-Asia), Seoul, Republic of Korea, 1–3 November 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Liu, W.; Ren, G.; Yu, R.; Guo, S.; Zhu, J.; Zhang, L. Image-Adaptive YOLO for Object Detection in Adverse Weather Conditions. arXiv 2021, arXiv:2112.08088. [Google Scholar] [CrossRef]
- Mehra, A.; Mandal, M.; Narang, P.; Chamola, V. ReViewNet: A Fast and Resource Optimized Network for Enabling Safe Autonomous Driving in Hazy Weather Conditions. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4256–4266. [Google Scholar] [CrossRef]
- Li, C.; Zhou, H.; Liu, Y.; Yang, C.; Xie, Y.; Li, Z.; Zhu, L. Detection-Friendly Dehazing: Object Detection in Real-World Hazy Scenes. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 8284–8295. [Google Scholar] [CrossRef]
- Sun, S.; Ren, W.; Wang, T.; Cao, X. Rethinking Image Restoration for Object Detection. Adv. Neural Inf. Process. Syst. 2022, 35, 4461–4474. [Google Scholar]
- Brummelen, J.V.; O’Brien, M.; Gruyer, D.; Najjaran, H. Autonomous Vehicle Perception: The Technology of Today and Tomorrow. Transp. Res. Part C Emerg. Technol. 2018, 89, 384–406. [Google Scholar] [CrossRef]
- Musat, V.; Fursa, I.; Newman, P.; Cuzzolin, F.; Bradley, A. Multi-Weather City: Adverse Weather Stacking for Autonomous Driving. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, BC, Canada, 11–17 October 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Fursa, I.; Fandi, E.; Musat, V.; Culley, J.; Gil, E.; Teeti, I.; Bilous, L.; Vander Sluis, I.; Rast, A.; Bradley, A. Worsening Perception: Real-Time Degradation of Autonomous Vehicle Perception Performance for Simulation of Adverse Weather Conditions. SAE Int. J. Connect. Autom. Veh. 2022, 5, 87–100. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A Large-Scale Hierarchical Image Database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; IEEE: New York, NY, USA, 2009. [Google Scholar]
- Geiger, A.; Lenz, P.; Urtasun, R. Are We Ready for Autonomous Driving? The KITTI Vision Benchmark Suite. In Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, RI, USA, 16–21 June 2012; IEEE: New York, NY, USA, 2012. [Google Scholar]
- Lin, T.Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Computer Vision—ECCV 2014; Springer International Publishing: Cham, Switzerland, 2014; pp. 740–755. ISBN 9783319106014. [Google Scholar]
- Cordts, M.; Omran, M.; Ramos, S.; Rehfeld, T.; Enzweiler, M.; Benenson, R.; Franke, U.; Roth, S.; Schiele, B. The Cityscapes Dataset for Semantic Urban Scene Understanding. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Scharwächter, T.; Enzweiler, M.; Franke, U.; Roth, S. Efficient Multi-Cue Scene Segmentation; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; pp. 435–445. ISBN 9783642406010. [Google Scholar]
- Leibe, B.; Cornelis, N.; Cornelis, K.; Van Gool, L. Dynamic 3D scene anlysis from a moving vehicle. In Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Minneapolis, MN, USA, 17–22 June 2007. [Google Scholar]
- Wojek, C.; Walk, S.; Schiele, B. Multi-Cue Onboard Pedestrian Detection. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; IEEE: New York, NY, USA, 2009. [Google Scholar]
- Ess, A.; Leibe, B.; Van Gool, L. Depth and Appearance for Mobile Scene Analysis. In Proceedings of the 2007 IEEE 11th International Conference on Computer Vision, Rio de Janeiro, Brazil, 14–20 October 2007; IEEE: New York, NY, USA, 2007. [Google Scholar]
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; Volume 1, pp. 886–893. [Google Scholar]
- Enzweiler, M.; Gavrila, D.M. Monocular Pedestrian Detection: Survey and Experiments. IEEE Trans. Pattern Anal. Mach. Intell. 2009, 31, 2179–2195. [Google Scholar] [CrossRef] [PubMed]
- Overett, G.; Petersson, L.; Brewer, N.; Andersson, L.; Pettersson, N. A New Pedestrian Dataset for Supervised Learning. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, San Antonio, TX, USA, 3–5 September 2008; IEEE: New York, NY, USA, 2008. [Google Scholar]
- Gerónimo, D.; Sappa, A.D.; López, A.; Ponsa, D. Adaptive image sampling and windows classification for on-board pedestrian detection. In Proceedings of the 5th International Conference on Computer Vision Systems, Bielefeld, Germany, 21–24 March 2007; Volume 39. [Google Scholar]
- Munder, S.; Gavrila, D.M. An Experimental Study on Pedestrian Classification. IEEE Trans. Pattern Anal. Mach. Intell. 2006, 28, 1863–1868. [Google Scholar] [CrossRef] [PubMed]
- Dollár, P.; Wojek, C.; Schiele, B.; Perona, P. Pedestrian Detection: An Evaluation of the State of the Art. IEEE Trans. Pattern Anal. Mach. Intell. 2012, 34, 743–761. [Google Scholar] [CrossRef] [PubMed]
- Brostow, G.J.; Shotton, J.; Fauqueur, J.; Cipolla, R. Segmentation and Recognition Using Structure from Motion Point Clouds; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2008; pp. 44–57. ISBN 9783540886815. [Google Scholar]
- Sakaridis, C.; Dai, D.; Van Gool, L. Semantic Foggy Scene Understanding with Synthetic Data. Int. J. Comput. Vis. 2018, 126, 973–992. [Google Scholar] [CrossRef]
- Carballo, A.; Lambert, J.; Monrroy, A.; Wong, D.; Narksri, P.; Kitsukawa, Y.; Takeuchi, E.; Kato, S.; Takeda, K. LIBRE: The Multiple 3D LiDAR Dataset. In Proceedings of the 2020 IEEE Intelligent Vehicles Symposium (IV), Las Vegas, NV, USA, 19 October–13 November 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Pitropov, M.; Garcia, D.E.; Rebello, J.; Smart, M.; Wang, C.; Czarnecki, K.; Waslander, S. Canadian Adverse Driving Conditions Dataset. Int. J. Rob. Res. 2021, 40, 681–690. [Google Scholar] [CrossRef]
- Caesar, H.; Bankiti, V.; Lang, A.H.; Vora, S.; Liong, V.E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; Beijbom, O. NuScenes: A Multimodal Dataset for Autonomous Driving. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Che, Z.; Li, G.; Li, T.; Jiang, B.; Shi, X.; Zhang, X.; Lu, Y.; Wu, G.; Liu, Y.; Ye, J. D2-City: A Large-Scale Dashcam Video Dataset of Diverse Traffic Scenarios. arXiv 2019, arXiv:1904.01975. [Google Scholar]
- Binas, J.; Neil, D.; Liu, S.C.; Delbruck, T. DDD17: End-to-End DAVIS Driving Dataset. arXiv 2017, arXiv:1711.01458. [Google Scholar]
- Chang, M.F.; Ramanan, D.; Hays, J.; Lambert, J.; Sangkloy, P.; Singh, J.; Bak, S.; Hartnett, A.; Wang, D.; Carr, P.; et al. Argoverse: 3D Tracking and Forecasting with Rich Maps. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; IEEE: New York, NY, USA, 2019. [Google Scholar]
- Sun, P.; Kretzschmar, H.; Dotiwalla, X.; Chouard, A.; Patnaik, V.; Tsui, P.; Guo, J.; Zhou, Y.; Chai, Y.; Caine, B.; et al. Scalability in Perception for Autonomous Driving: Waymo Open Dataset. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Lei, Y.; Emaru, T.; Ravankar, A.A.; Kobayashi, Y.; Wang, S. Semantic Image Segmentation on Snow Driving Scenarios. In Proceedings of the 2020 IEEE International Conference on Mechatronics and Automation (ICMA), Beijing, China, 2–5 August 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Wenzel, P.; Wang, R.; Yang, N.; Cheng, Q.; Khan, Q.; von Stumberg, L.; Zeller, N.; Cremers, D. 4Seasons: A Cross-Season Dataset for Multi-Weather SLAM in Autonomous Driving; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2021; pp. 404–417. ISBN 9783030712778. [Google Scholar]
- Tung, F.; Chen, J.; Meng, L.; Little, J.J. The Raincouver Scene Parsing Benchmark for Self-Driving in Adverse Weather and at Night. IEEE Robot. Autom. Lett. 2017, 2, 2188–2193. [Google Scholar] [CrossRef]
- Zendel, O.; Honauer, K.; Murschitz, M.; Steininger, D.; Domínguez, G.F. WildDash-Creating Hazard-Aware Benchmarks. In Computer Vision—ECCV 2018; Springer International Publishing: Cham, Switzerland, 2018; pp. 407–421. ISBN 9783030012304. [Google Scholar]
- Choi, Y.; Kim, N.; Hwang, S.; Park, K.; Yoon, J.S.; An, K.; Kweon, I.S. KAIST Multi-Spectral Day/Night Data Set for Autonomous and Assisted Driving. IEEE Trans. Intell. Transp. Syst. 2018, 19, 934–948. [Google Scholar] [CrossRef]
- Yan, Z.; Sun, L.; Krajnik, T.; Ruichek, Y. EU Long-Term Dataset with Multiple Sensors for Autonomous Driving. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Sheeny, M.; De Pellegrin, E.; Mukherjee, S.; Ahrabian, A.; Wang, S.; Wallace, A. RADIATE: A Radar Dataset for Automotive Perception in Bad Weather. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Liu, D.; Cui, Y.; Cao, Z.; Chen, Y. A Large-Scale Simulation Dataset: Boost the Detection Accuracy for Special Weather Conditions. In Proceedings of the 2020 International Joint Conference on Neural Networks (IJCNN), Glasgow, UK, 19–24 July 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Ros, G.; Sellart, L.; Materzynska, J.; Vazquez, D.; Lopez, A.M. The SYNTHIA Dataset: A Large Collection of Synthetic Images for Semantic Segmentation of Urban Scenes. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE: New York, NY, USA, 2016. [Google Scholar]
- Yu, F.; Chen, H.; Wang, X.; Xian, W.; Chen, Y.; Liu, F.; Madhavan, V.; Darrell, T. BDD100K: A Diverse Driving Dataset for Heterogeneous Multitask Learning. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; IEEE: New York, NY, USA, 2020. [Google Scholar]
- Sakaridis, C.; Dai, D.; Van Gool, L. ACDC: The Adverse Conditions Dataset with Correspondences for Semantic Driving Scene Understanding. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, BC, Canada, 11–17 October 2021; IEEE: New York, NY, USA, 2021. [Google Scholar]
- Kenk, M.A.; Hassaballah, M. DAWN: Vehicle Detection in Adverse Weather Nature Dataset. arXiv 2020, arXiv:2008.05402. [Google Scholar]
- Braun, M.; Krebs, S.; Flohr, F.; Gavrila, D. EuroCity Persons: A Novel Benchmark for Person Detection in Traffic Scenes. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 41, 1844–1861. [Google Scholar] [CrossRef] [PubMed]
- Neuhold, G.; Ollmann, T.; Bulo, S.R.; Kontschieder, P. The Mapillary Vistas Dataset for Semantic Understanding of Street Scenes. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Richter, S.R.; Hayder, Z.; Koltun, V. Playing for Benchmarks. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Huang, X.; Wang, P.; Cheng, X.; Zhou, D.; Geng, Q.; Yang, R. The ApolloScape Open Dataset for Autonomous Driving and Its Application. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 2702–2719. [Google Scholar] [CrossRef] [PubMed]
- Gray, N.; Moraes, M.; Bian, J.; Tian, A.; Wang, A.; Xiong, H.; Guo, Z. GLARE: A Dataset for Traffic Sign Detection in Sun Glare. arXiv 2022, arXiv:2209.08716. [Google Scholar] [CrossRef]
- Jiang, P.; Ergu, D.; Liu, F.; Cai, Y.; Ma, B. A Review of Yolo Algorithm Developments. Procedia Comput. Sci. 2022, 199, 1066–1073. [Google Scholar] [CrossRef]
- Diwan, T.; Anirudh, G.; Tembhurne, J.V. Object Detection Using YOLO: Challenges, Architectural Successors, Datasets and Applications. Multimed. Tools Appl. 2023, 82, 9243–9275. [Google Scholar] [CrossRef] [PubMed]
- Terven, J.; Cordova-Esparza, D. A Comprehensive Review of YOLO: From YOLOv1 and Beyond. arXiv 2023, arXiv:2304.00501. [Google Scholar]
- Jocher, G.; Chaurasia, A.; Qiu, J. YOLO by Ultralytics. 2023. Available online: https://github.com/ultralytics/ultralytics (accessed on 10 October 2023).
- Sharma, T.; Debaque, B.; Duclos, N.; Chehri, A.; Kinder, B.; Fortier, P. Deep learning-based object detection and scene perception under bad weather conditions. Electronics 2022, 11, 563. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Datasets | BDD [56] | Eurocity [59] | Mapillary [60] | P.F.B. [61] | ApolloScape [62] | GLARE [63] |
|---|---|---|---|---|---|---|
| No. of images | 100,000 | 47,300 | 25,000 | 254,064 | 143,906 | 2157 |
| Pros | Huge number of images collected from various cities of USA. | Gathered from 31 cities across 12 European countries. | The most diverse dataset in the geographical context. | Huge number of images. | Contains sun glare images. | Contains sun glare images. |
| Cons | Lower number of harsh weather images. | Mainly focused on pedestrian detection. | Lower number of harsh weather images. | Lower number of harsh weather images (artificial). | Lower number of harsh weather images. | For traffic sign detection only. |
| Weights Trained on | Weights Evaluated on | |||||
|---|---|---|---|---|---|---|
| Weight Trained on Version No. | Input Images | Base Weights | Size of Images during Training | Approximate Training Time for the MERGED Dataset (32 Epochs) | Size of Validation Images | Size of Test Images |
| V1 | Raw images | yolov8x.pt | 640 × 640 | 4 h | Raw images | Raw images |
| V2 | 640 × 640 (augmented) | yolov8l.pt | 640 × 640 | 5 h | 640 × 640 | 640 × 640 |
| V3 | 640 × 640 | yolov8l.pt | 640 × 640 | 2 h | 640 × 640 | 640 × 640 |
| V4 | 1280 × 1280 | yolov8x.pt | 640 × 640 | 3.5 h | 1280 × 1280 | 1280 × 1280 |
| V5 | 1280 × 1280 (augmented) | yolov8x.pt | 640 × 640 | 4.5 h for 16 epochs | 1280 × 1280 | 1280 × 1280 |
| DAWN | ACDC | MERGED | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Weather | Train | Valid | Test | Total | Train | Valid | Test | Total | Train | Valid | Test | Total |
| Sand | 223 | 63 | 33 | 319 | 0 | 0 | 0 | 0 | 223 | 63 | 33 | 319 |
| Fog | 193 | 59 | 27 | 279 | 638 | 179 | 88 | 905 | 831 | 238 | 115 | 1184 |
| Rain | 142 | 40 | 19 | 201 | 698 | 198 | 98 | 994 | 840 | 238 | 117 | 1195 |
| Snow | 142 | 41 | 21 | 204 | 700 | 200 | 100 | 1000 | 842 | 241 | 121 | 1204 |
| Night | 0 | 0 | 0 | 0 | 679 | 193 | 97 | 969 | 679 | 193 | 97 | 969 |
| Total | 700 | 203 | 100 | 1003 | 2715 | 770 | 383 | 3868 | 3415 | 973 | 483 | 4871 |
| Versions | A0 | A1 | A2 | A3 | A4 | A5 | A6 | A7 | A8 |
|---|---|---|---|---|---|---|---|---|---|
| Types of Augmentation | No* | Flip, Crop, Rotation | Flip, Crop, Rotation, Shear, Blur | Flip, Crop, Rotation, Grayscale | Flip, Crop, Rotation, Hue, Saturation | Flip, Crop, Rotation, Exposure, Brightness | Flip, Crop, Rotation, Hue, Brightness | All* | Flip, Crop |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kumar, D.; Muhammad, N. Object Detection in Adverse Weather for Autonomous Driving through Data Merging and YOLOv8. Sensors 2023, 23, 8471. https://doi.org/10.3390/s23208471
Kumar D, Muhammad N. Object Detection in Adverse Weather for Autonomous Driving through Data Merging and YOLOv8. Sensors. 2023; 23(20):8471. https://doi.org/10.3390/s23208471
Chicago/Turabian StyleKumar, Debasis, and Naveed Muhammad. 2023. "Object Detection in Adverse Weather for Autonomous Driving through Data Merging and YOLOv8" Sensors 23, no. 20: 8471. https://doi.org/10.3390/s23208471
APA StyleKumar, D., & Muhammad, N. (2023). Object Detection in Adverse Weather for Autonomous Driving through Data Merging and YOLOv8. Sensors, 23(20), 8471. https://doi.org/10.3390/s23208471