1. Introduction
SNOLAB [
1,
2], located beneath the Creighton nickel mine in Ontario, Canada, is a critical hub for conducting ultra-sensitive physics experiments that demand minimal background radiation. Its unique features, including a complex layout and depth of 2 km underground, make it an ideal environment for cutting-edge research. The facility, originally established for the Sudbury Neutrino Observatory (SNO) [
3], now hosts numerous experiments. Notably, DEAP-3600 [
4,
5,
6,
7,
8], the world’s largest liquid argon dark matter detector, operates in Cube Hall, alongside the MiniCLEAN [
9] (now decommissioned) and the NEWS-G [
10] (now at the commissioning stage) experiments. These endeavors primarily focus on detecting interactions between weakly interacting massive particles (WIMPs) and argon nuclei, offering insights into dark matter, which comprises a significant portion of the universe’s mass. Overall, SNOLAB’s contributions are crucial to advancing the understanding of fundamental physics and unraveling the mysteries of the cosmos.
The difficulties of searching for rare events, such as dark matter, include reducing unwanted background noise and improving the ratio of useful signal to unwanted noise in order to detect these uncommon events. This involves dealing with statistical limitations, the sensitivity of the equipment, and being able to differentiate between actual signals and noise. One specific type of noise is the gamma radiation from the surrounding environment that affects the detector.
Various methods are employed to assess low-level gamma-ray background in underground laboratories. For instance, at SNOLAB’s Cube Hall, external gamma radiation characterization techniques for the DEAP-3600 detector are detailed [
11]. DEAP-3600 is a liquid argon dark matter detector with tight control over radioactive backgrounds [
12]. It is placed in a water tank to shield it from rock radioactivity and cosmic ray muons.
Thermoluminescent detector (TLD) systems, functioning as passive sensors, are valuable for background monitoring in places such as Cube Hall because they are cost-effective, compact, and non-intrusive. They help detect any background variations that might affect measurements. Measurements around DEAP-3600’s water shielding have been performed using TLDs [
11].
The uniformity or non-uniformity of environmental gamma-ray backgrounds in underground labs can result from various factors. This study employed TLDs similar to those used at Chalk River Laboratories (CRL) to measure doses. The assessments of the doses and dose rates with TLDs undergo regular independent blind tests [
13,
14] and have been successful.
The water shielding for DEAP-3600 is designed based on extensive Monte Carlo studies to optimize background rejection and environmental gamma background protection. These studies assume a uniform background distribution. This paper reports on external dose measurements in SNOLAB’s Cube Hall using TLD dosimeters placed around DEAP-3600’s water shielding.
Scope of Work
In prior research [
11], the effectiveness of employing integrating passive detectors such as TLDs to measure ambient radiation levels in SNOLAB, an underground facility with extremely low background radiation, was established successfully. Moreover, the research found that the background radiation does not spread uniformly around the water shielding of the DEAP-3600 detector. This discovery holds importance for both Monte Carlo simulation studies and the design of shields for upcoming large-scale dark matter detectors [
15,
16,
17].
In this study, our primary objective was to confirm the variations we previously observed in the data with a high degree of confidence. We wanted to establish reliable confidence intervals for the non-uniform background radiation based on the data we have collected. Therefore, in the next section, we present our findings and the methodology of the data analysis, which underscores the significance of using Steiner’s most-frequent-value method in combination with bootstrapping.
3. Results
Detectors were positioned within Cube Hall at SNOLAB (see Figure 1 in [
11]), with a focus on the DEAP-3600 water shield area (see Figure 4 in [
11]).
Table 1 presents data for detectors that met a specific selection criterion (which is explained later). It includes both “rear” and “front” TLD chips (see Figure 3 in [
11]), along with their average values and standard deviations. These detectors were deployed on 27 November 2018 and removed on 22 January 2019, totaling 1342 h of exposure. The deployment and removal took 2 h, and this time was considered when measuring the interval. A calibration method recommended by NIST [
38] was used to ensure that the timer’s accuracy was within 0.02%. However, the timer’s accuracy was not considered in the ambient dose rate measurements, as it was much smaller than the standard deviation in the dose measurements.
Accurately measuring radiation exposure, especially in environments rich in X-rays and gamma-rays such as Cube Hall at SNOLAB, poses a significant challenge [
11]. This is due to the need to obtain precise data on the ambient radiation levels within Cube Hall, where radiation levels can vary considerably across different locations. This involves choosing the right data to determine the true ambient radiation for passive TLD sensors in the same badge.
To do this, statistical analysis considers variability within and between groups of TLD badges. These variations are seen as random effects and are described by their associated components of variance. For TLD badges with unique IDs, only two TLD chips were placed in the same spot in Cube Hall. Through calibration, it was confirmed that the measured doses from these chips in the same badge were consistent within their variance, serving as a selection criterion for the ambient dose.
Table 1 displays the results for TLDs that met this criterion, meaning the ambient dose results for the rear and front TLD chips in the same badge were within one standard deviation of each other. Control dosimeters detected
Gy (9.5 ± 1.1 mR) of radiation during transportation and storage (information about how the control dosimeters are used can be found in [
11]). We also provide the dose value in milliroentgens (mR) to align with the dose value previously published [
11]. The data presented in Table 1 of the reference paper by Golovko et al. [
11] were used for the results shown in
Table 1. The only change made here was the conversion of the dose measurements into gray (Gy) units (8.8
Gy/mR [
39,
40]).
The TLD detectors with IDs from 4 to 24 were on the DEAP-3600 water shield, IDs 25 and 26 were near a fire door (see Figure 2 in [
11]); ID 28 was on the Cube Hall deck; ID 29 was on top of the DEAP-3600 water shield. The specific locations within Cube Hall are not detailed in this paper.
In principle, one expensive and time-consuming option to obtain a confidence interval would be to replicate the TLD measurement at the DEAP-3600 water shield several times. If one repeats the experiment several times, then one can keep track of each ambient dose value and end up with a larger set of dose data, which could be used to estimate the confidence interval. However, as mentioned earlier [
11], repeating the ambient dose measurements with multiple passive TLD sensors several times is both expensive and time-consuming, although it requires much less time compared with the use of active detectors.
Suppose one possesses a dataset [
11] reflecting authentic ambient dose measurements (refer to
Table 1) and one requires a confidence interval determined through statistical methods, such as the MFV. Instead of replicating ambient dose measurements multiple times, one can consider a bootstrap approach [
36,
37]. An additional advantage of bootstrapping is its applicability in cases with or without a well-defined probability model for the data [
35]. Thus, let us use the bootstrapping technique to gain deeper insights into which confidence interval more accurately represents the ambient dose measurements at Cube Hall. As previously noted, the MFV technique and confidence interval bootstrapping were applied to perform a reliable analysis of neutron lifetime measurements [
26]. In this work, we aimed to use the same approach to establish a confidence interval for ambient dose measurements at Cube Hall.
The average radiation levels were measured in two different situations at SNOLAB’s Cube Hall. In one scenario, we placed TLD sensors both at the front and rear positions, and these sensors were spread out around the water shielding of the DEAP-3600 detector. In another scenario, we used passive integrating sensors, again at the front and rear positions, and these sensors were positioned in two places: around the water shielding of the DEAP-3600 detector and inside Cube Hall itself. More information with pictures about the positions of the TLDs badges mentioned in
Table 1 can be found in [
11].
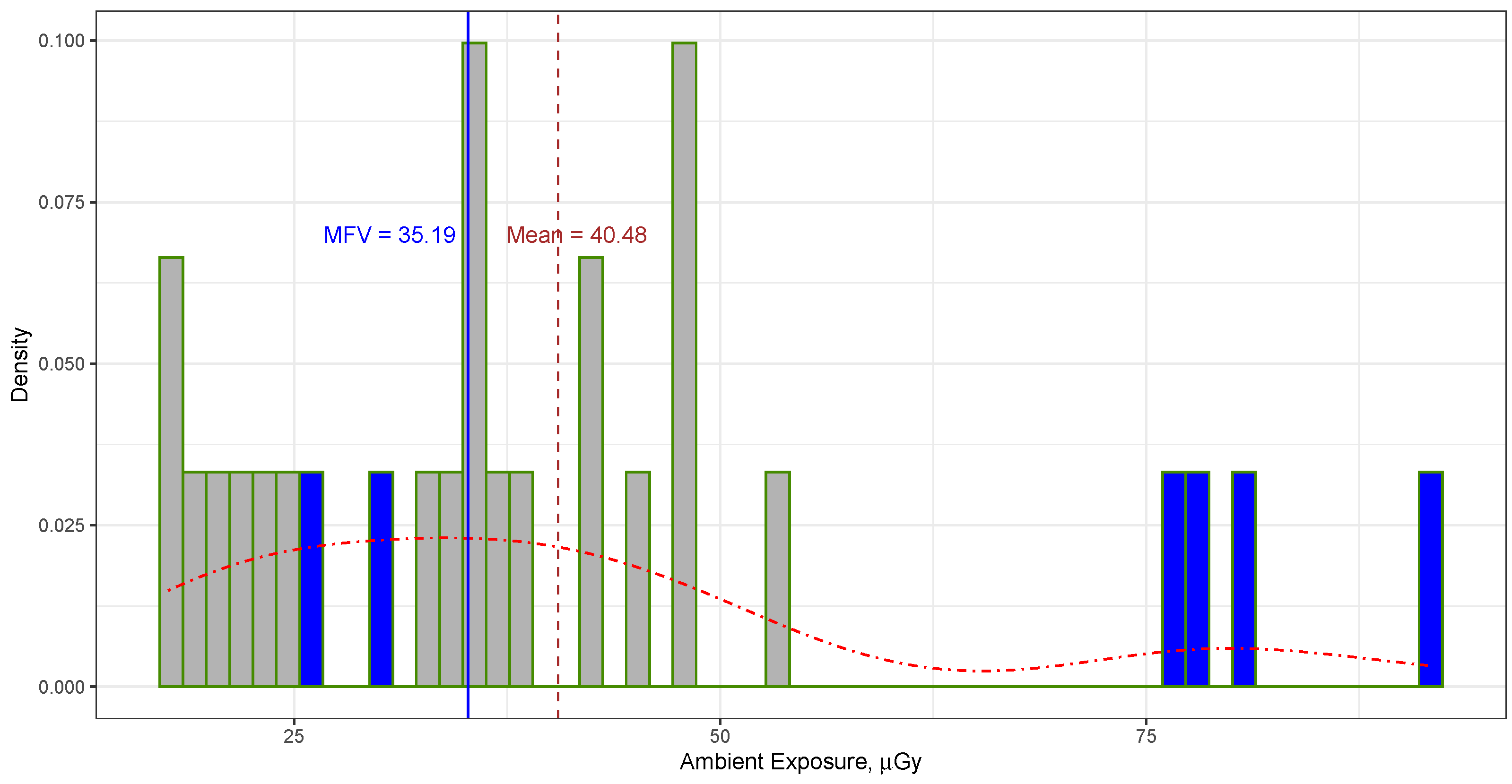
The mean of all ambient dose measurements taken at the “front” and “rear” positions of the TLD sensors in Cube Hall at SNOLAB, as listed in
Table 1, was calculated to be
Gy (or
mR [
11]), with the error indicating the standard deviation. The quoted uncertainties are given at the 68.27% confidence level, which corresponds to the [20.45, 60.51] confidence interval, whereas the 95.45% confidence interval for all data is [0.42, 80.54]. The reason why the confidence level was chosen as 68.27% or 95.45% is because these values are widely used in statistical analysis and associated with 1 and 2 sigma errors. In contrast, the MFV for these measurements was determined to be
Gy. It is important to note that this error reflects the variance of the MFV, as calculated using Equation (
3). This equation assumes that the data follow a symmetrical distribution, which may not necessarily be true in this particular scenario. Therefore, it would be advantageous to employ a bootstrap approach to establish a reliable confidence interval with a high level of confidence. The mean and MFV values are shown as vertical lines in
Figure 1.
The mean of the ambient dose measurements gathered from passive integrating sensors positioned at various locations of the water shielding surrounding the DEAP-3600 detector within Cube Hall at SNOLAB from both the front and rear TLDs, as indicated in
Table 1, was computed to be
Gy (or
mR [
11]). The provided uncertainties are expressed at the 68.27% confidence level, corresponding to the confidence interval [22.93, 45.31]. The 95.45% confidence interval for all the data is [11.74, 56.50]. In contrast, the MFV derived from these measurements was determined to be
Gy. It is crucial to emphasize that this error corresponds to the variance of the MFV, calculated using Equation (
3). These values are visually depicted as vertical lines in
Figure 2. It is worth noting that the MFV for the ambient dose around the water shielding of the DEAP-3600 detector is quite similar to the MFV ambient dose observed in Cube Hall.
In essence, the average statistic from the data in
Table 1 can give us a confidence interval at both the 68.27% and 95.45% confidence levels. This information could help us estimate the maximum ambient radiation levels in Cube Hall and around the water shielding of the DEAP-3600 detector. However, there is a catch—the average statistic assumes that the data follow a normal (or Gaussian) distribution. As we discussed in
Section 2.2, this method is not always reliable and stable.
Our research revealed a more-dependable approach: using the most-frequent value along with bootstrapping. This combination provides trustworthy estimates of the ambient radiation levels both at the water shielding surrounding the DEAP-3600 detector and within Cube Hall at SNOLAB. It offers an efficient alternative to traditional data-collection methods. Specifically, it helps us pinpoint the most-common values and simplifies the data analysis, which are crucial when we need precise ranges of values.
As we already mentioned, an alternative method is to use a statistical technique called bootstrapping. It is particularly useful when the original dataset lacks observational errors [
41]. One repeats this bootstrapping process multiple times (typically 1000 to 3000 times) to create a distribution of a statistic called the MFV. From this MFV distribution, one can calculate confidence intervals at different confidence levels, such as 68.27% and 95.45%. It is important to note that gathering a comparable set of ambient dose data using the traditional method, as described in the previous study [
11], would take an impractical 459 years (3000 tests, each taking 1342 h) using passive integrating sensors such as TLDs.
Using the bootstrapping technique for all the ambient dose measurements taken at both the front and rear positions of TLD sensors in Cube Hall at SNOLAB, as listed in
Table 1, along with the MFV statistics at the 68.27% confidence level, yielded a confidence interval for all the measurements of [31.60, 38.60]. Meanwhile, the 95.45% confidence interval for all the data was [28.10, 42.11]. The histogram in
Figure 3 presents the MFV derived from 3000 replicates of the bootstrapped data. In simpler terms, estimating the ambient dose in Cube Hall at SNOLAB using the MFV statistics and a bootstrapping technique resulted in a value of
with a range of [31.60, 38.60], representing the uncertainty at the 68.27% confidence level. Comparing these bootstrapping errors to the MFV variance estimated using Equation (
3), which resulted in
Gy, we found that the variance was of the same order as the bootstrap uncertainty indicated in Equation (
5). The advantage of bootstrapping over the MFV variance is that the former does not rely on assumptions about the data distribution.
Applying the bootstrapping approach to the entirety of the ambient dose measurements gathered from the passive integrating sensors positioned at various locations of the water shielding surrounding the DEAP-3600 detector within Cube Hall at SNOLAB from both the front and rear TLDs, as indicated in
Table 1, combined with the MFV statistics at a 68.27% confidence level, produced a confidence interval for these measurements within the range of [31.32, 38.38]. Furthermore, a 95.45% confidence interval for all the data was determined to be [27.79, 41.91]. The histogram featured in
Figure 4 showcases the MFV derived from 3000 replicates of the bootstrapped data. In more-accessible terms, estimating the ambient dose of the water shielding surrounding the DEAP-3600 detector within Cube Hall at SNOLAB through the use of the MFV statistics in conjunction with the bootstrapping methods yielded a result represented as:
with an associated range of [31.32, 38.38], which denotes the level of uncertainty at the 68.27% confidence level. When comparing these bootstrapping errors to the MFV variance, as computed through Equation (
3) and yielding
Gy, it becomes evident that the variance aligns with the magnitude of the bootstrap uncertainty presented in Equation (
6). The advantage of using bootstrapping, as opposed to the MFV variance (see Equation (
3)), is its ability to remain unaffected by assumptions about how the data are distributed, whether they follow a symmetric (balanced) or asymmetric (unbalanced) pattern.
In contrast, if one wants to determine the uncertainty of the MFV using Equation (
3), there is no need to use the bootstrapping technique to measure the extent of the bootstrap uncertainty. However, one must possess prior knowledge that the observed measurements adhere to a Gaussian (or normal) distribution. This requirement is akin to what is needed for calculating the mean or weighted mean statistic. Nevertheless, it is important to note that data do not always follow a Gaussian distribution, even if the dataset is quite extensive [
24,
25,
26,
42]. For instance, studies have indicated that, if two independent variables adhere to a normal distribution, their ratio does not [
43]. This clearly illustrates the limitation of applying standard normal statistics in certain physical scenarios.
Taking into account the 1342-h exposure of passive integrating TLD sensors and using the MFV ambient doses from Equations (
5) and (
6), we can compute the ambient dose rates within Cube Hall and around the DEAP-3600 water shielding at SNOLAB, yielding:
with uncertainty representing the 68.27% confidence level. Specifically, the one-
range for the ambient dose rate within Cube Hall, as deduced from MFV bootstrapping (
), encompasses [23.55, 28.76], while the ambient dose rate encompassing the DEAP-3600 water shielding (
) lies within [23.34, 28.60]. Furthermore, the two-
range for the ambient dose rate in Cube Hall, determined via MFV bootstrapping (
), is [20.94, 31.38], and the corresponding range around the DEAP-3600 water shielding (
) is [20.71, 31.23]. Both of these ranges signify a 95.45% confidence level.
4. Discussion
In our prior research [
11], we verified the effectiveness of passive detectors such as TLDs for measuring low-level radiation at SNOLAB. Moreover, we observed non-uniform environmental ambient doses around the water shielding.
Table 1 emphasizes noticeable variations within one standard deviation of the outcomes, mainly influenced by the nearby MiniCLEAN water tank near the DEAP-3600 detector. These data are important for Monte Carlo simulations used to evaluate background levels for DEAP-3600 or any potential large-scale dark matter experiments.
Nonetheless, a lingering question was the determination of a highly accurate confidence interval for this non-uniform background radiation. Employing the most-frequent-value method in combination with bootstrapping, we tackled this inquiry and established suitable confidence intervals for both Cube Hall and the DEAP-3600 water shielding, achieving confidence levels of 68.27% and 95.45%.
The ambient dose and dose rate information can serve as cautious upper bounds for gamma radiation in the vicinity of the DEAP-3600 water shield. These data are instrumental in determining the required shielding thickness to ensure that detectors, such as DEAP-3600, remain unaffected by environmental gamma background. Specifically for DEAP-3600, the maximum ambient dose around the water shielding and the highest ambient dose rate are 41.91 Gy and 31.23 nGy/h, respectively, with a 95.45% level of confidence.
In a similar way, we can calculate the maximum expected levels of environmental gamma radiation in Cube Hall for any extensive detector setup. These calculations offer average values and statistical margins, essentially providing us with a safety buffer. For Cube Hall, in particular, the highest expected ambient dose is 42.11 Gy, and the maximum anticipated ambient dose rate is 31.38 nGy/h, both with a 95.45% confidence level. This method proves to be more efficient than deploying a single active detector at various spots one after the other, a process that would be significantly more time-consuming.
As we mentioned before, the unevenness of the radiation levels around the DEAP-3600 detector and in the Cube Hall at SNOLAB have been discussed in a previous study [
11]. In this work, our main focus was to determine the range of uncertainty based on actual measurements using passive sensors like TLDs, with a specific level of confidence (for example, 68.27% or 95.45%). For future dark matter detectors, it would be helpful to know the upper limit of the uncertainty range, which can be used as a cautious estimate of the background radiation level for designing the shielding. Shielding against the background radiation can improve the accuracy of dark matter measurements by providing better control over the experimental conditions and reducing uncertainties. However, designing and implementing such shielding can be expensive and technically challenging. It may require advanced materials, sophisticated techniques, and additional infrastructure, which can increase the complexity and cost of the experiment. So, if we use passive sensors such as TLDs and specific statistical methods such as the MFV and bootstrapping, we can provide a range of uncertainty with a known level of confidence. This will give accurate and dependable results.
In summary, this study showcased the effectiveness of passive detectors such as TLDs as sensors in gauging minimal radiation levels at SNOLAB. It also furnished crucial information for evaluating the ambient radiation in the vicinity of the DEAP-3600 detector and within Cube Hall. In addition, the use of the MFV coupled with bootstrapping techniques enables the determination of confidence intervals with a high level of certainty. For direct dark matter detection experiments, such as DEAP-3600, which rely on extremely sensitive detectors, understanding the distinction between dark matter signals and background interference is paramount.
5. Conclusions
Using passive sensors such as TLDs and the MFV statistical method, we estimated the ambient radiation levels in Cube Hall and around the DEAP-3600 water shielding at SNOLAB. This approach provides a cost-effective and efficient alternative to traditional methods. The data are crucial for simulating how unwanted radiation might impact experiments, especially when searching for dark matter particles such as WIMPs.
Our calculations showed that, in Cube Hall at SNOLAB, the ambient radiation level, determined using the MFV statistics and bootstrapping, for 1342 h of exposure is approximately 35.19 Gy, with an uncertainty range of to Gy, representing a 68.27% confidence level. Around the DEAP-3600 water shielding, the ambient radiation level is about 34.80 Gy, with an uncertainty range of to Gy, also at a 68.27% confidence level. These estimates provide essential insights for experimental planning in SNOLAB, particularly for dark matter research.
We harnessed the bootstrapping technique to compute confidence intervals for our ambient dose measurements. This method is advantageous because it does not assume a specific data distribution and can be used with data that do not follow a normal distribution. By combining the MFV statistic with bootstrapping, we established confidence intervals at the 68.27% and 95.45% levels for ambient dose levels. This information is vital for evaluating the potential impact of environmental electromagnetic background radiation on large-scale dark matter experiments.
Moreover, this research showed that using the MFV method along with bootstrapping gives results similar to those of traditional methods, but in a much shorter time. We found that, gathering equivalent data using traditional approaches would be extremely time-consuming and impractical. These techniques are not just useful for measuring ambient dose and dose rates; they can also be used in other scientific fields where analyzing sensor data is necessary, especially when dealing with complex data distributions.
In conclusion, this study underscored the efficacy of employing the MFV and bootstrapping methodologies for precise ambient radiation level estimation, thereby furnishing invaluable guidance for radiation exposure control within facilities such as SNOLAB. These approaches present pragmatic and efficient alternatives to traditional data-acquisition methods. Notably, this research represents the first documented instance of using the most-frequent value in conjunction with bootstrapping techniques to calculate confidence levels with exceptional precision using TLDs as sensor detectors.







{kind=link}
{kind=link}
{kind=link}
{kind=link}