Abstract
Sign language recognition, an essential interface between the hearing and deaf-mute communities, faces challenges with high false positive rates and computational costs, even with the use of advanced deep learning techniques. Our proposed solution is a stacked encoded model, combining artificial intelligence (AI) with the Internet of Things (IoT), which refines feature extraction and classification to overcome these challenges. We leverage a lightweight backbone model for preliminary feature extraction and use stacked autoencoders to further refine these features. Our approach harnesses the scalability of big data, showing notable improvement in accuracy, precision, recall, F1-score, and complexity analysis. Our model’s effectiveness is demonstrated through testing on the ArSL2018 benchmark dataset, showcasing superior performance compared to state-of-the-art approaches. Additional validation through an ablation study with pre-trained convolutional neural network (CNN) models affirms our model’s efficacy across all evaluation metrics. Our work paves the way for the sustainable development of high-performing, IoT-based sign-language-recognition applications.
1. Introduction
About 70 million people worldwide use sign language (SL), and a machine translation system could significantly change communication between people who use SL and those who do not. Nonverbal communication that uses additional physical organs is called SL communication, which uses facial emotions, lip, hand, and eye gestures to convey information. A significant portion of daily communication for those who are hard of hearing or deaf is SL [1]. According to the World Health Organization, 5% of people on Earth have a hearing impairment. Although this number may seem tiny, it shows that over 460 million people worldwide are affected by hearing loss, 34 million of whom are children. It is predicted that more than 900 million people will have hearing loss by 2050 [2], with 1.1 billion young people at risk of becoming deaf due to noise exposure and other problems. Worldwide, hearing loss has a cost of USD 750 billion [2]. Depending on the degree of deafness, there are four types of hearing loss: mild, moderate, severe, and profound. People with severe or profound hearing loss find it challenging to communicate since they are unable to pay attention to others. A deaf person’s mental health can be significantly affected by poor communication, which can leave them feeling lonely, isolated, and unhappy. The SL used by the deaf community is gesture-based. Deaf people communicate by using gestures from SL. Interaction between a hearing person and a deaf person is complicated by the fact that the hearing person does not understand these signs. Just as spoken languages differ from each other, there are about 200 SLs around the world.
The deaf use SL, a kind of communication to exchange information. It uses gestures or signs that are major physical motions that are not part of other natural languages to convey messages. Messages are conveyed through finger and hand gestures, head nods, shoulder movements, and facial emotions. Thus, this study would allow hearing people or hearing and deaf people to talk to each other. When a hard-of-hearing or deaf person is trying to communicate something, they use gestures as a means of communication. Every symbol indicates a distinct word, letter, or feeling. Similar to how a sequence of words forms a word in spoken languages, a mixture of signals creates a sentence. SL thus has a syntax and sentence structure like a fully developed natural language. When speaking and listening in SL, facial features and lip, eye, and hand gestures are utilized to deliver meaning. SL is an important part of daily interaction with deaf people [3]. Nevertheless, it was extremely challenging for computers to comprehend hand signals due to the inconsistent size, shape, and posture of the hands or fingers in an image. SL can be tackled from two different angles: sensor-based and image-based. Users of expression frameworks do not need to employ sophisticated devices, which is their main benefit. In any case, a lot of work needs to be carried out during the preprocessing step. It is impossible to exaggerate the value of language for development. It not only serves as a channel for interpersonal communication but also helps people accept social rules and improve communication control. Even though they can hear the language spoken to them, deaf children do not learn the same terms to describe themselves as hearing children.
Recent SL research falls into two categories: Strategies based on vision and approaches based on contact. A component of the interaction technique is the interaction between users and sensing equipment. An interferometric glove is typically used to collect data on finger movement, bending, motion, and the angle of the generated sign using EMG signals, inertial measurements, or electromagnetic measurements. As input to the platform, the visual approach utilizes information from video streams taken with a camera. Additionally, it is split into presence and 3D-model-based approaches categories [4]. Most 3D model-based methods start by creating a 2D image from the position and joint angle of the hand in 3D space.
Demeanor identification uses attributes taken from a PowerPoint presentation of the image, whereas recognition relies on matching the traits [5]. Few “normal” people can understand or utilize SL, even though many hearing-impaired people have mastered it. This affects the communication of people with communication impairments and fosters a feeling of alienation between them and “normal” society. By utilizing technology that continuously transforms SL to written language and vice versa, this gap can be closed. Academics have now been helped by numerous paradigm shifts in many scientific and technological domains to suggest and put into practice SL recognition systems. Instead of using written or spoken language, people communicate with one another by using hand signals, a gesture-based method. There are 25 nations whose official language is Arabic. Only a small portion of the populace in some countries speaks Arabic [6]. Some estimates place the overall number of countries at 22 to 26. Arabic gestures are not deontological, although the language is. Jordanians, Libyans, Moroccans, Egyptians, Palestinians, and Iraqis, to name a few, are among those who speak Arabic. But every nation has a distinctive dialect. Or, to put it another way, there appear to be two dialects of Arabic: formal and informal. Arabic SL is the same across the board because they all use the same alphabet. This feature is quite helpful for research projects. A close-knit community exists among Arabs who are deaf. Low levels of interaction exist between the deaf and hearing populations, with most interactions occurring between deaf communities, deaf relatives, and occasionally playmates and professionals. Arabic SL is recognized using a continuous recognition program based on the K-nearest neighbor classifier and an Arabic SL feature-extraction method. However, Tubaiz’s method has the fundamental flaw of requiring patients to wear interferometric gloves to record data on certain activities, which in turn can be very distracting to users [7]. An interferometric glove was developed to aid in the development of a system for recognizing Arabic SL. Arabic SL can be recognized continuously using hidden Markov models (HMMs) and temporal features [8]. The goal of the study was to transcribe Arabic SL for use on portable devices. Previous work covered a wide range of SLs, but few of the studies focused on Arabic SL. Using a HMM quantifier, the researchers achieved 93% accuracy for a sample of 300 words. They used KNN and Bayesian classifications [9], which gave similar results to HMMs. This article introduces a network-matching technique for ongoing Arabic SL sentence recognition. The model makes use of decision trees and breaks down actions into stationary positions. They translate multi-word sentences with at least 63% accuracy using a polynomial runtime method. However, the above approaches, mostly based on a conventional approach to initialize weights, which involves problems of vanishing gradients and high computational complexity, achieved only a limited level of accuracy for the recognition of Arabic SL.
To address this problem, we propose a highly accurate and effective CNN-based model for Arabic SL recognition. The proposed model utilizes a lightweight EfficientNetB3 model as a backbone feature extractor; afterward, stacked autoencoders are used to refine the extracted features before the classification stage. The proposed model uses stacked coded layers and EfficientNet as the backbone architecture, which significantly increases the accuracy, decreases the false discovery rate, and enables deployment over edge devices. The main contributions of the proposed work are as follows:
- We propose an intelligent method for Arabic SL recognition that utilizes a customized variant of the EfficientNetB3 model as the foundation for feature extraction. Our model incorporates stacked autoencoders to enable robust feature selection, ensuring the optimal mapping of input images. Through extensive experimentation using various CNN models, our approach demonstrates superior recognition capabilities for Arabic sign language. The integration of densely linked coding layers further enhances the model’s performance, facilitating the accurate and efficient recognition of Arabic SL gestures.
- We conducted an extensive review of the current state-of-the-art methods for Arabic sign language recognition, with a specific focus on CNN-based approaches recognized for their high-performance capabilities in this field. Our thorough analysis revealed that the proposed model surpasses existing methods, exhibiting superior performance and holding significant potential for real-world deployment, even under limited resource constraints. By offering both efficiency and accuracy, our model presents a compelling solution for effectively and accurately recognizing Arabic sign language in various practical applications.
- The superiority of our model is substantiated through comprehensive experimentation using the ArSL2018 benchmark dataset, wherein it outperforms state-of-the-art approaches and ablation studies. Our model exhibits lower false discovery rates and achieves higher identification accuracy, affirming its exceptional performance and efficacy in Arabic sign language recognition. Furthermore, the proposed model is deployable for resource-constraint devices and can apply to different organizations.
2. Related Work
The fourth most spoken language in the world is Arabic (Generates a Set Consulting Group 2020). In 2001, the Arab Federation of the Deaf officially declared Arabic SL as the main language for people with speech and hearing problems in Arab countries. Arabic SL is still in its infancy, even though Arabic is one of the most widely spoken languages in the world. The most general issue that Arabic SL patients realize is “diglossia”. Each country has its regional dialects that are spoken instead of written languages. As a result, the different dialects spoken have given rise to different Arabic SLs. They are as numerous as the Arab states, but all share the same alphabet and a small number of vocabulary words. Arabic is one of the more sophisticated and appealing languages and is spoken by over 380 million people around the world as the first official language. The intellectual and semantic homogeneity of Arabic is tenable [8]. The ability of NN to facilitate the recognition of Arabic SL hand gestures was the main concern of the authors in this study [10]. The main aim of this work was to illustrate the application of different types of stationary and dynamic indicators by detecting actual human movements. First, it was shown how different architectures and fully and moderately repetitive systems can be combined with a feed-forward neural network and a recurrent neural network [10]. The experimental evaluations show a 95% precision rate for the detection of stationary action, which inspired them to further explore their proposed structure. The automated detection of Arabic SL alphabets using an image-based approach was highlighted in [11]. In particular, to create an accurate sensor for the Arabic SL alphabet, several visual aspects were investigated. The extracted visible tags were fed into the One-Versus-All SVM. The results demonstrated that the Histogram of Oriented Gradients obtained promising performance, using One-Versus-All SVM and HOG identifiers. The Kinect sensor was used in [12] to develop a real-time automatic Arabic SL recognition system based on the Dynamic Time Warping coordination approach. Power and data gloves are not used by the software. Different aspects of human–computer interactions were covered in a few other studies [13]. Studies from 2011 that can identify Arabic SL with an accuracy of up to 82.22% [14,15] show that Hidden Markov models are at the center of alternative methods for SL recognition. Some other works using Hidden Markov Models can be found in [16]. A five-stage approach for an Arabic SL translator with an efficiency of 91.3% was published at the same time in [16], which focuses on the background subtraction of transcription, size, or partial invariance. Almasre and Al-Nuaim recognized 28 Arabic SL gestures using specialized detectors such as the Microsoft Kinect or Leap Motion Detectors. More recent studies have focused on understanding Arabic SL [17]. An imaging method that included the elevation, width, and intensity of the elements was used to create many CNNs and provide feedback. Instead, the frame rate of the depth footage is used by CNN to interpret the data, which also defines how vast the system is. Faster refresh rates produce more detail, while lower frame rates produce less depth. Furthermore, a new method for Arabic SL recognition was proposed in 2019 using a CNN to identify 28 letters of the Arabic language and digits from 0 to 10 [18]. In numerous training and testing permutations, the proposed seven-layer architecture was frequently taught, with the highest apparent correctness being 90.02 percent using a training dataset of 80 percent images. Finally, the researchers showed why the proposed paradigm was better than alternative strategies. Among deep neural networks, CNNs have primarily been utilized in computer-vision-based methods that generally focus on the collected images of a motion and extract its important features to identify it. Multimedia systems, emotion recognition, picture segmentation and semantic breakdown, super resolution, and other issues have all been addressed using this technology [19,20,21]. Oyedotun et al. employed a CNN and the Stacked Denoising Autoencoder to identify 24 American SL gestures [22]. Pigou et al. [23], on the other hand, recommended the use of a CNN for Italian SL recognition [24]. Another study [25] shows a remarkable CNN model that uses hand gestures to automatically recognize numbers and communicates the precise results in Bangla. This model is used in the current investigation [25]. In a related work [24,25], a CRNN module is used to estimate hand posture. Moreover, [26], recommends using a deep learning model to recognize the distinguishing features in large datasets and apply transfer learning to data collected from different individuals. In [27], a Bernoulli heat map based on deep CNN was constructed to measure head posture. Another study used separable 3D convolutional networks using a neural network to recognize dynamic hand gestures for identifying the hand signal. Another article [28] was submitted on wearable hand gesture recognition using flexible strain sensors; this is the most recent study on this topic. The authors of [29] made the most recent work-related hand gesture deformable CNN in use. Another recent effort proposed for HCI uses fingerprint detection for hand gesture recognition [30]. A small neural network is used to recognize hand gestures [31]. Learning geometric features [32] is another way to understand hand gestures. In [33], the K-nearest neighbor method provides a reliable recognition system. Arabic SL is one way to capture statistical feature extraction using a classifier. The Arabic character language is another way. Tubaiz’s method has a number of weaknesses, but the biggest one is that users have to wear instrumented gloves to capture the subtleties of a particular gesture, which is often very uncomfortable for the user. In [34], the researcher proposed using a glove with instruments to create a system for recognizing Arabic SL utilizing hidden Markov models and spatiotemporal features for the continuous recognition of Arabic SL. The authors of [35] advocated using a multiscale network for hand pose estimation. Similarly, ref. [36] investigated text translation from Arabic SL for use on portable devices. It is reported in [37] that Arabic SL can be automatically identified using sensor and picture approaches. In [38], the authors provide a programmable framework for Arabic SL hand gesture recognition using two depth cameras and two Microsoft Kinect-based machine learning algorithms. The CNN approach, which is now being used to study Arabic SL, is also unmatched [39].
In addition to the above approaches, a region-based (RCNN) is also explored for sign language recognition. For instance, various backbone pre-trained models are evaluated with RCNN, which intelligently works in numerous background scenes [40]. Next, in the case of low-resolution images, the authors of [41] used CNN for more prominent features, followed by machine learning classifiers SVM with triplet loss. Similarly, to overcome the issue of computational complexity, ref. [42] proposed a lightweight model for real-time sign language recognition, which obtained incredible performance on testing data. However, these models show better classification accuracy in the case of small datasets but limited performance over large-scale datasets. To tackle such issues, a deep CNN network was developed that was trained on massive amounts of samples and improved recognition scores [43]. This work is further enhanced in [44], where a novel deep CNN architecture is designed that obtained a tremendous semantic recognition score. In addition, to address the balancing problem, the authors of [45] developed a DL model followed by a synthetic minority oversampling technique that yielded better performance with a large number of parameters and a large model size. Therefore, it is highly desirable to develop an image-based intelligent system for Arabic hand sign recognition using novel CNN architecture.
After deep and careful analysis, we concluded that the existing work suffers from several significant limitations:
- Many approaches in the field rely on conventional weight-initialization methods, leading to issues such as vanishing gradients and high computational complexity. These challenges hinder the overall accuracy and performance of Arabic sign language recognition.
- Despite previous efforts, the existing approaches have achieved only a restricted level of accuracy in recognizing Arabic sign language. This indicates the need for further advancements to attain more precise and reliable recognition results.
- The current approaches may lack robustness when dealing with complex hand gestures, varying lighting conditions, and occlusions. This limitation hampers their effectiveness in real-world scenarios where such challenges commonly occur.
- Another notable drawback is the high computational complexity associated with the existing methods, which can impede their practical deployment, particularly in resource-constrained environments.
Addressing these limitations is crucial for advancing Arabic sign language recognition and facilitating its widespread practical application. By improving accuracy, robustness, and computational efficiency, we can enhance the effectiveness of recognition algorithms and ensure the precise interpretation of Arabic sign language gestures. Robustness enhancements will enable these systems to handle complex hand gestures, varying lighting conditions, and occlusions encountered in real-world scenarios. Additionally, reducing computational complexity will make the technology more accessible and deployable in resource-constrained environments. Overcoming these limitations will unlock the full potential of Arabic sign language recognition, promoting inclusive communication for individuals with hearing impairments.
3. The Proposed Model
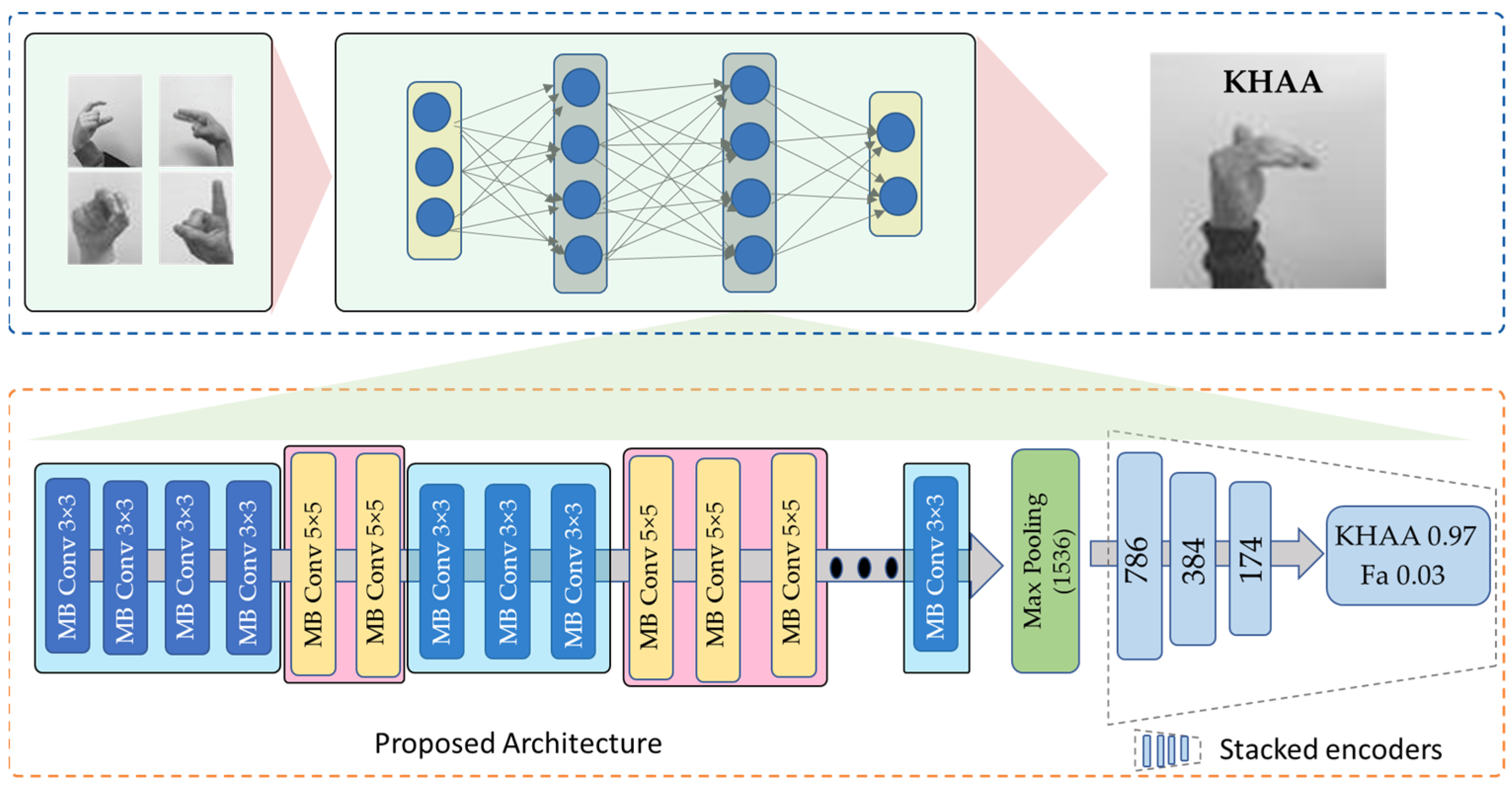
The literature uses a variety of techniques to identify Arabic SL. Some of these methods employ deep neural networks, which are computationally expensive and have poor accuracy. To address this problem, an efficient CNN model is proposed with less computation and that obtains acceptable performance when applied to edge devices. An overview of the proposed is shown in Figure 1. The proposed model uses EfficientNetB3 as the baseline model for feature extraction. The suggested densely connected encoder layers are used to further process the EfficientNetB3 output feature vector. Our model is briefly described in the upcoming subsections.
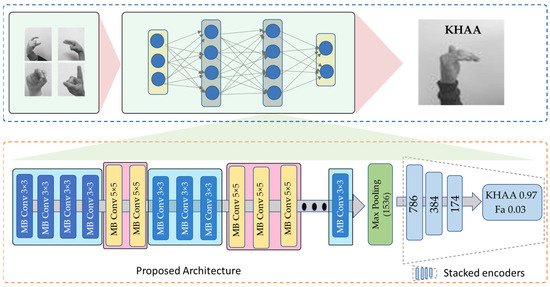
Figure 1.
The overall architecture of the proposed model.
3.1. EfficientNetB3: Backbone Architecture
Several CNN-based models have been proposed in the related work for a variety of applications, including crowd estimation [43], time series prediction [46,47], classification [48], object detection [49,50], and object reidentification [51,52]. In the recent literature, several CNN designs have been created for fire recognition, including AlexNet [53], SqueezeNet [54], GoogleNet [55] MobileNet, etc. However, each CNN model has its advantages and disadvantages. To cope with this, researchers are investigating several CNN models to improve their performance by changing the width, depth, or resolution of the network through different scaling strategies. Finally, we have studied the EfficientNet design for Arabic SL recognition, in which the network dimensions are scaled using the compound scaling approach to ensure significant feature extraction from the input. The best discriminative features are then selected by sending these features through layers of tightly coupled autoencoders for feature encoding. The network then uses a SoftMax function as previously used by AlexNet [53] to perform the categorization.
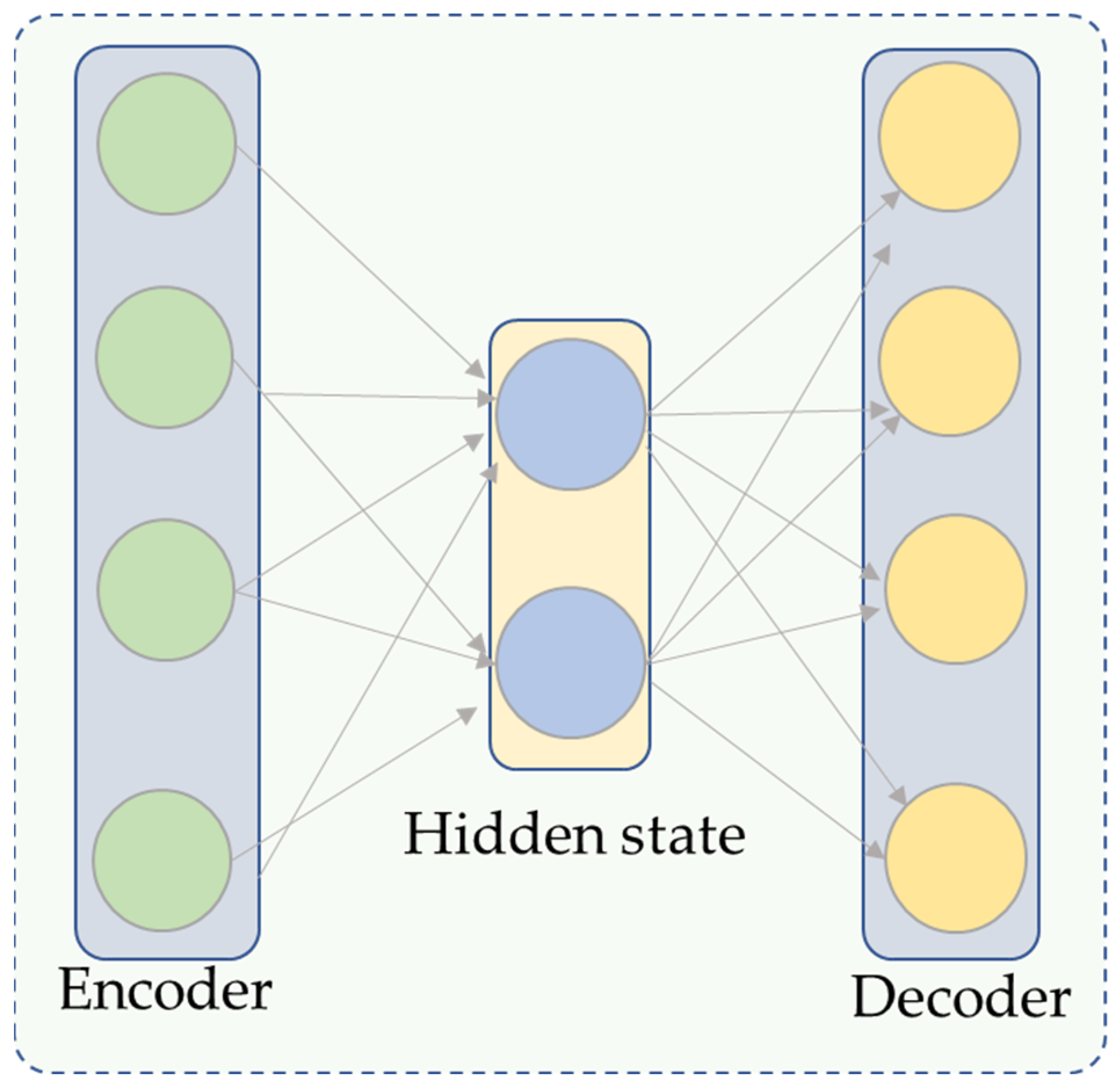
3.2. Autoencoder
In order to comprehend uncontrolled input in a feature map, representational learning is frequently performed using autoencoder-based architectures. Input, hidden, and output layers are typically included in autoencoders. Figure 2 shows a graphical representation of these layers. The encoder maps the input into smaller dimensions, and the decoding layers then renovate it. These two components make up the bulk of an autoencoder. Consider the input data (Xn)N (n = 1), where xn is a member of the r(m-x-l) group, hn is the low-dimensional mapping computed from xn, and On is the output decoder whose mathematical equations are given in Equations (1) and (2).
where b is a bias term in the network, f is an encoding function, G is a decoding function, and w is the weight metric. The input is encoded into a compressed feature representation using the autoencoder’s encoding section. The autoencoder’s decoding component is used to reconstruct these compressed characteristics once they have been encoded. The encoding portion reduces the high-dimensional input features’ dimensions while maintaining the representation of all characteristics.
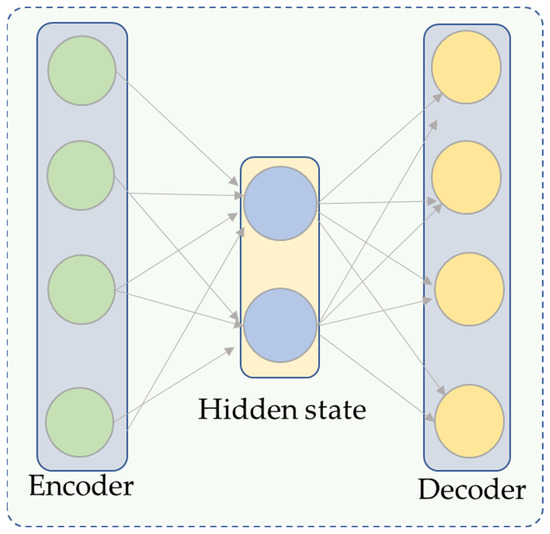
Figure 2.
The autoencoder structure of the proposed model.
3.3. Weight Randomization
Three different layer types, including convolutional, pooling, and fully connected, are included in CNN. The convolutional layer extracts spatial features by using multiple layers and a dot product with weights of different filter sizes. The weights are added up in the end, and then an activation function is used to teach nonlinearity [56]. The initialization of weights and bias, which enables the extraction of distinguishing features from the input data, is the most important step in a convolutional process. At the beginning of the training, even before the weights of the first layer have been learned, the bias is optimized to minimize the error using the loss function and backpropagation. Due to the rapid changes in the gradient caused by the different values of hyperparameters such as the learning rate, vanishing gradients and bursting gradients are common problems that occur during training [57]. Therefore, researchers experimented with a variety of hyperparameters to fine-tune the model’s weights and improve performance. There are three distinct categories for weight initialization [57]. The zero initializers and the one initializer are the constant methods that are used to initialize network connections in the first category. When these initialization strategies are used, the learning algorithm’s equations often do not update the network weights, locking the model and causing each layer to have the same weights and perform similar calculations. When these distribution matrices are filled with random values, the second category’s distribution initialization approaches have a uniform or Gaussian distribution. The incorrect assignment of the necessary parameters of the network, such as the standard deviation and the mean of the distribution, can affect the training of the model and cause the problem of vanishing gradients. The third group uses the approach of initializing random weights based on past information. The model identifies local minima with inertial convergence and requires more training time since the classical CNN architecture often relies on the backpropagation error that iteratively changes the parameter [58]. Neural networks with random weight initialization have been proposed in the literature as a solution to these problems. Examples include functional link networks with random vectors. In [58], functional link networks are presented [59], and ELM is presented in [60]; Cao et al. [61] provide more information. In addition to activation functions, heuristic approaches are employed for the establishment of random layer weights. In addition to activation functions, heuristic approaches are employed for the establishment of random layer weights. Without using a process that ensures an ideal solution, the heuristics technique is employed to solve problems. Such randomization allocates the variance of the normal distribution according to the input shape. Heuristic methods lessen the problem of disappearing or expanding gradients, enabling faster convergence and reducing minima oscillation. In recent years, conventional deep learning models have shown promise in a variety of domains; however, these models still face several important challenges, such as high computational complexity, task-specific parameter adaptation, low convergence rates, etc. Compared to a standard neural network, initialization with random weights can significantly reduce the training and testing time of the model while maintaining a higher level of accuracy [60].
3.4. Technical Details of the Proposed Model
The following layer of the proposed model consists of densely connected coding layers based on the EfficientNetB3 design. Significant features are extracted from the input data using the EfficientNet model, and these features are then transferred to the stacked coding layers for further processing, randomly initializing the weights. The salient data are preserved, while the output of EfficientNet is compressed into these layers based on an autoencoder. We use the encoding component of the autoencoder to better capture the output characteristics of EfficientNet. Three encoding layers are included in EfficientNetB3, which produces a feature vector of 1536 dimensions, which is then compressed to a feature vector with 786 dimensions. The 786-dimensional feature vector in this example was encoded into a 384-dimensional feature vector and then into a 174-dimensional feature vector to allow the proposed model to perform at its best, as indicated in the results section. We use the technique presented [62] in stacked encoding layers with superior performance versus other models [63]. Further details are provided on densely interconnected networks by presenting a number of connectivity patterns, such as the direct connection from each layer to every other subsequent layer. The general structure of the highly connected network is shown in Figure 2. The mathematical representation of this mechanism is given in Equation (3)
where L stands for the layers, x0, x1, and x2, and h is the nonlinear activation function. In xL1, the feature map concatenations resulting from 0, 1, 2, … L are displayed. In this work, we concatenated the output of each encoding layer with the input of the previous layer to obtain the dimensionality with the best features for the final classification. Finally, classification is performed using the SoftMax classifier. With a learning rate of 1 × 10−4, a momentum of 0.9 and a loss function of binary cross-entropy, the recommended model is trained over 20 iterations. After a series of experiments, the optimizer, learning rate, and epoch count are decided upon.
4. Experiments and Discussions
This section describes the evaluation parameters and results obtained using the ASLR-2018 dataset, their comparison with state-of-the-art methods, and an ablation study with various deep learning models.
4.1. Dataset Description
The dataset is accessible at ArSL2018 [42], a machine learning and deep learning conference hosted by Prince Mohammad Bin Fahd University in Al Khobar, Saudi Arabia. The collection includes 54,049 photographs of 32 typical Arabic alphabets and characters, each drawn by more than 40 different artists. Depending on the category, each class contains a different number of images. Each unique hand gesture conveys some significant information. Each class has over 1500 images, and each class’s hand gestures or signs denote a specific connotation. Visually, Figure 3 shows an example image of every subclass and its label. Thirty-two files are produced for specific storage schemes, and each folder has about 1500 images of hand movements made by people of various ages in various settings. The training and validation datasets of the model, which are explained in more detail in the next section, are treated as the directories containing these files. Data preparation is necessary in order to make the dataset more reliable and suitable for use as input in the model before discussing the model in question. The data processing is described in more detail in the following section.

Figure 3.
The sample images of each class in the dataset.
4.2. Data Preprocessing
As was already indicated, each class has a different number of images. The model’s training performance may suffer from this disparity between the classes. To prevent this imbalance, there must be a balanced distribution of photos among all classes. The imbalance is eliminated by collecting the file names of the individual images in each class folder in a loop. From the current class folder, 1000 photos are randomly selected at each iteration, and the remaining photos are deleted. By adding together 1000 photographs from each class, 32,000 total images are then filtered. Each class has one image, each of which is 64 × 64 in size. Rescaling the images to 32 × 32 with the same dimensionality ratio will make the computations during training simple and quick.
4.2.1. Data Augmentation
The data augmentation strategy is often used to increase the size of the training dataset by creating digitally altered replicas of the original images [64]. The process leads to a more diverse and trustworthy set of images, which in turn leads to more general and informed deep learning models. By making a number of potential adjustments to the training images, the approach helps prevent the model from being overfitted or underfitted. This augmentation strategy consists of moving the object to the left, right, up, and down to a predefined boundary, and vice versa, as shown in Figure 4a. This augmentation method randomly darkens and lightens the images up to a predefined boundary, as shown in Figure 4b. Similarly, the augmentation shown in Figure 4c,d demonstrates the rotation at different degrees and zooming in or out up to the specified limit.

Figure 4.
Represents different kinds of data augmentation techniques, (a) show the original images, (b) contrast adjustments, (c) rotations and (d) zooming.
4.2.2. Data Splitting
Several different dataset types are used to create the model’s input data. There are three different valuable datasets for computer vision projects that can be used to compare, contrast, and improve the performance of the model. These three different dataset types are used in different stages of building a machine learning model. The three different datasets are described below. A training dataset is used to train the model to determine weights or features. The model is first fitted to the training dataset, which in our case contains about 25,600 samples. In this case, the training dataset comprises 70% of the total dataset. The model is fitted to the validation dataset so that it can be objectively evaluated after training. The performance of the model is used to validate it before it is used for real-time testing on the test data set, depending on how effectively the model learns its weights. Twenty percent of the dataset is used for validation in our example of SL recognition. After the training and validation processes are finished, the performance of the proposed model is assessed, its effectiveness and accuracy are measured, and its training efficiency is evaluated using a test data set. We selected 10% of the test data from the original dataset to evaluate the performance of the model.
4.3. Evaluation Metric
We evaluated our model for each of the 32 sign classes for the Arabic alphabet separately using precision, recall, and Fl-score, as follows.
Precision: It is also known as positive predictive value.
Recall: The percentage of accurate predictions divided by the total number of accurate class values is the recall percentage. The recall is described in Equation (5).
F1-score: The F1-score is often referred to as the F-measure. The balance between recall and precision is represented by the F1-score. The F1-score only increases when both precision and recall increases. The range of F1-score values is from 0 to 1, where the higher the number, the more accurate the classification. F1-score is calculated using Equation (6).
Accuracy is defined as the proportion of correct predictions to all correctly projected class values.
4.4. Model Evaluation
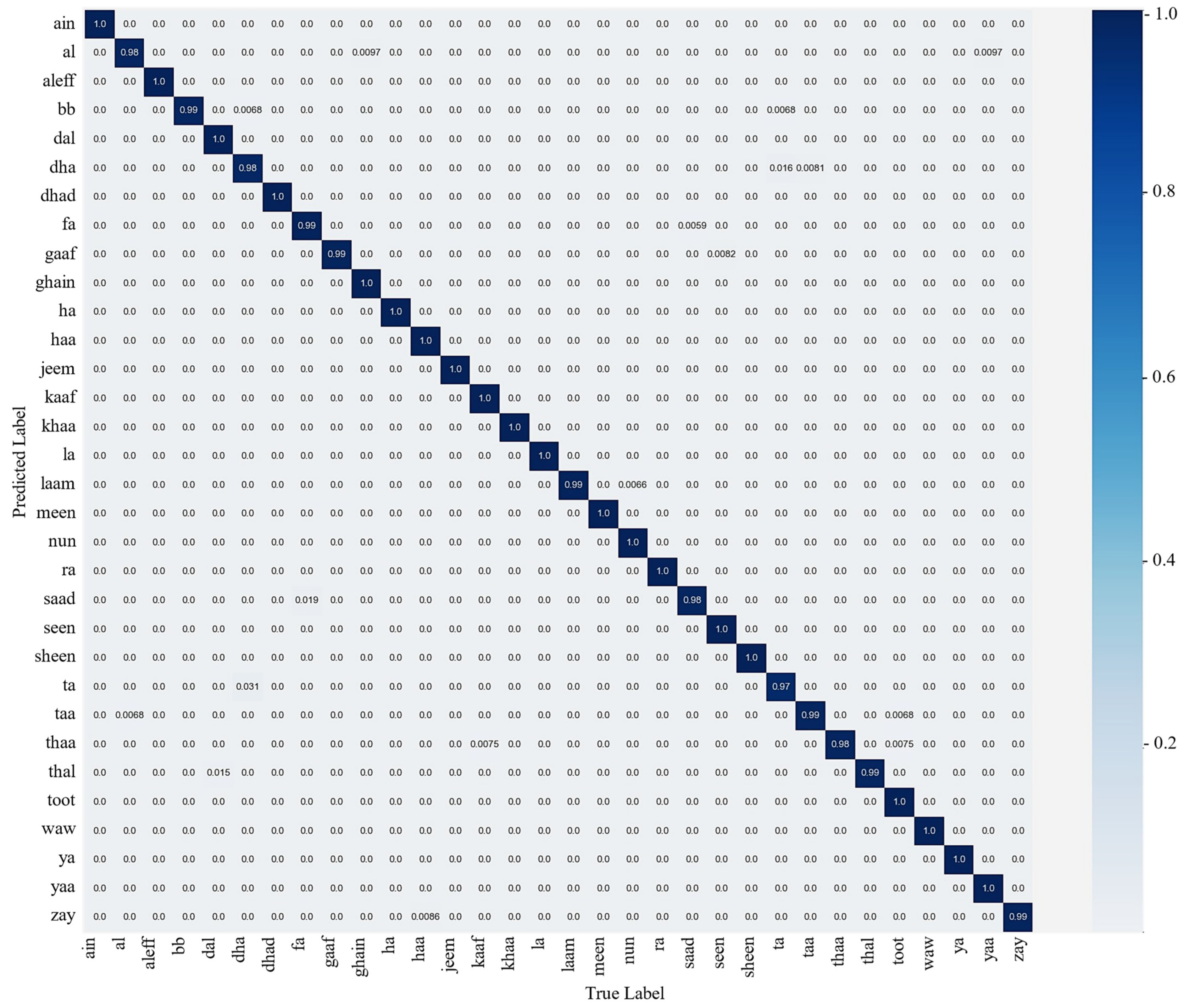
This section describes the training and evaluation process of the proposed model, where the trained model is observed over testing data that are not to be examined during training. To train the proposed model, after extensive experimentation, we selected the hyperparameters, including the SGD optimizer with a momentum of 0.09, a learning rate of 0.001, a batch size of 32, and 20 epochs. The selection of these hyperparameters is dependent on the experimental data. Therefore, on the basis of the aforementioned datasets, the proposed model achieved an optimal result over 20 epochs. The result of the proposed model is examined using the confusion matrix and the classification report. The classification report represents the precision, recall, F1-score, and accuracy of the proposed model for each class, as given in Table 1, which indicates an average accuracy of 99.26%. Figure 5 illustrates the confusion matrix for each class, which shows the ratio of accurate and misclassified samples.

Table 1.
The classification report of the proposed model using a test set. In addition, the support shows the number of samples.
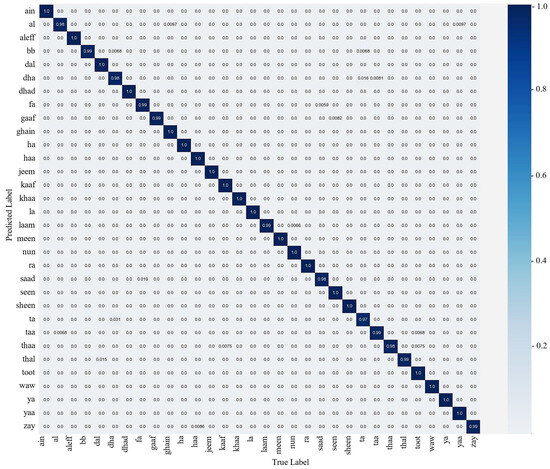
Figure 5.
The confusion matrix of the proposed model using the test set.
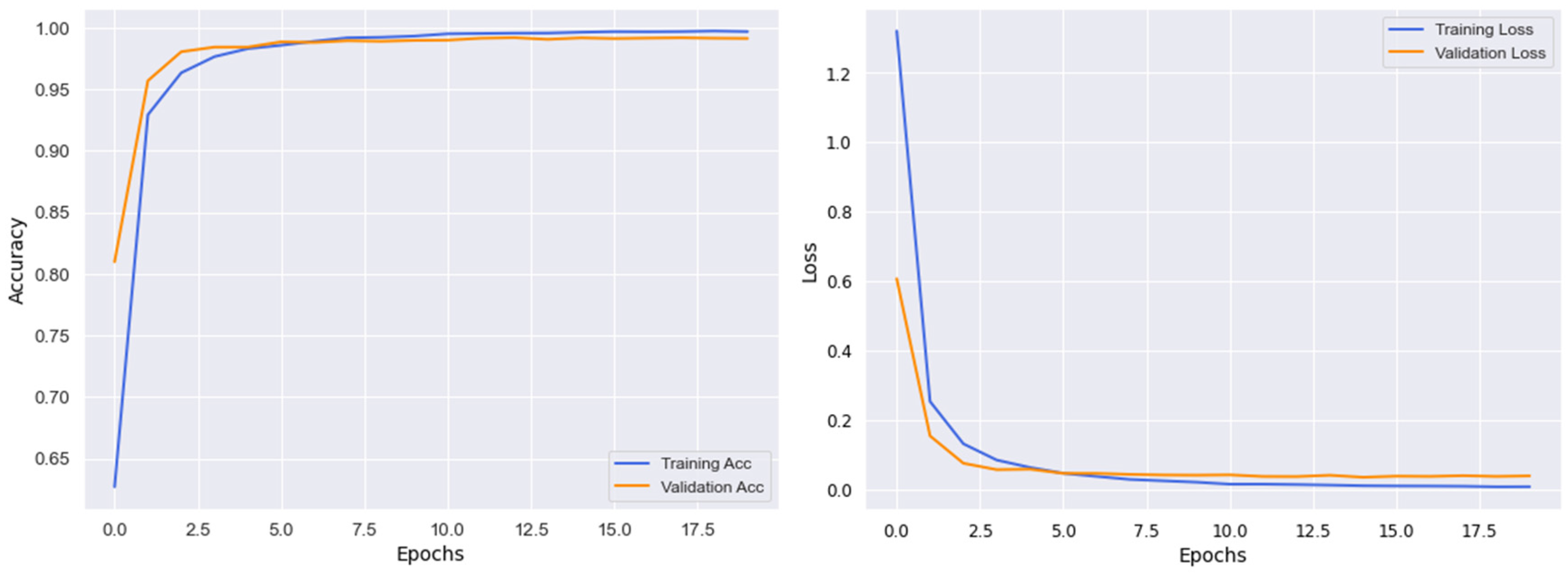
As explained earlier, we employed customized the EfficientNetB3 architecture for Arabic SL recognition. The reason behind choosing an EfficienetB3 is not only the better performance but also has less model complexity as compared to state-of-the-art approaches. Figure 6 shows the accuracy and loss graph for the model, and the proposed model is trained for 20 epochs. In Figure 6, the x-axis represents the number of epochs, and the y-axes show validation loss, validation accuracy, training loss, and training accuracy. In Figure 6, the training and validation accuracies increase gradually, while the training loss and validation losses decrease significantly. By achieving 100% and 99.20% training and validation accuracy, respectively, using the desired dataset, the model converges in the 10th epoch by achieving higher accuracies for both training and validation and lower loss for training and validation as well. Thus, the proposed model performs with better performance in terms of accuracy and loss, as can be observed.
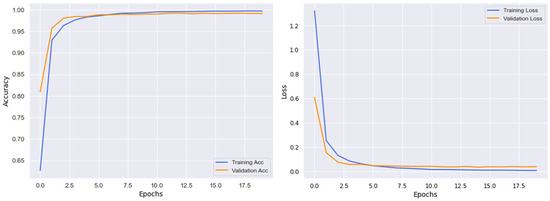
Figure 6.
The training and validation graphs in consideration of accuracy and loss.
4.5. Comparative Analysis
In this section, we compare the proposed model with several state-of-the-art models such as Alawwad et al. [40], Althagafi et al. [41], Zakariah et al. [42], Latif et al. [43], Elsayed et al. [44], Alani et al. [45], and Duwairi et al. [12] in terms of accuracy. These methods are considered state-of-the-art methods for Arabic SL recognition. In comparison, the lowest accuracy is achieved by Althagafi et al. [41], who used their model without any data augmentation approach. The second lowest is achieved by Elsayed et al. [44]. However, they used a data augmentation approach to increase the model performance. It can also be seen that Duwairi et al. [12] proposed VGGNET and obtained promising performance. Alani et al. [45] achieved higher performance of 96.59 and 97.29% accuracy with and without the data augmentation approach, respectively. However, our model performs better than the previous models, achieving 2.26% higher accuracy than Duwairi et al. [12] and 1.97% higher accuracy than Alani et al. [45]. As shown in Table 2, the proposed model achieves higher accuracy than the compared models. Furthermore, in a comparison between our model with and without the data augmentation, a notable increase of 0.91 in accuracy was observed with the use of data augmentation approach.
Table 2.
Comparison of the proposed model with state-of-the-art models, where WAUG and WOAUG denote the results with augmentation and the results without augmentation, respectively.
4.6. Ablation Studies
In this section, we compare the ArSL2018 performance of EFFNet with the performance of other compact deep learning models. These models include solo and integrated MobileNetV2, DenseNet121, NASNetMobile, EfficientNetB0, EfficientNetV2B0, EfficientNetV2B1, and our model with encoding layers. Table 3 shows the accuracy, recall, F1-score, and precision for each model. In Table 3, the proposed model performs well in solo baseline CNN, and the second-best performance is achieved using DensNet121, whereas the lowest performance is associated with the NasNetMobile. In the comparison, the integrated CNNs with an encoder–decoder network achieved promising results. However, our model outperformed MobileNet and previous iterations of EfficientNet in terms of all evaluation matrices. Finally, the proposed model outperformed the alternative approaches and achieved an average precision, recall, F1-score, and accuracy of 99.40%, 98.90%, 99.10%, and 99.26%, respectively. The use of pre-trained models has limited performance on SL-recognition ArSL2018 datasets, as we found through the ablation research. However, by incorporating encoder–decoder approaches int optimal feature selection, these models achieve better performance. Three feature coding layers initialized with random weights produced the best results in terms of accuracy and a decrease in false alarm rate. Thus, the proposed model provides an efficient and effective method for Arabic SL recognition. Furthermore, to compare the model size and number of parameters, the proposed model can be deployable over resource-constraint devices. In Table 3, it can be seen the MobileNetV2 model has a lower model size of 14 MB; however, the proposed model obtained higher performance than MobileNetV2 in terms of all evaluation matrices. Thus, the proposed model is the second best lightweight model in the comparison.
Table 3.
Ablation comparison of the proposed model with baseline CNN models.
To comprehensively assess the impact of the modules employed in our proposed model, we employed a range of strategies, as detailed in Table 4. Initially, we examined the model’s performance when solely utilizing the encoder, achieving a 98.87% classification accuracy. Subsequently, by integrating the decoder, we observed a further enhancement in performance, yielding an accuracy of 99.03%.
Table 4.
Analysis of the influence of the encoder and the decoder with the proposed model.
The outcomes of these analyses serve to highlight the robustness of our proposed model. Notably, it not only surpassed the performance of the standalone encoder network by a substantial margin of 0.39 percentage points but also demonstrated superiority over the decoder network, surpassing it by 0.23 percentage points. These results unequivocally establish the effectiveness of our model in achieving elevated levels of performance. This underscores its adeptness at seamlessly integrating the strengths inherent in both the encoder and decoder modules, resulting in a cohesive and high-performing architecture.
5. Conclusions and Future Research Directions
This work aims at helping the deaf and mute community in the Arab region by developing an efficient model based on CNN coupled with staked autoencoder mechanism that converts the images of Arabic SL into letters. Various solo CNN-based and integrated stacked autoencoder models were utilized to investigate the model robustness analysis. A modified EfficientNetB3 was used to extract deeper spatial detail from the given image; afterwards, these extraction features were passed through a staked autoencoder, where the weight is randomly initialized. In the staked autoencoding network, we employed a SoftMax function after the encoding layer for the recognition of Arabic SL. The main objective of these layers is to represent the output of the model in a more abstract form, which increases the model performance in terms of precision, recall, F1-score, and accuracy. Using a solo CNN-based model, the EfficientNetB3 model achieved a higher value for accuracy of 97.20%; however, our model surpassed the EfficientNetB3 model by obtaining a 2.06% higher accuracy. Furthermore, we explored various lightweight CNN models to choose an optimal model for Arabic SL recognition in terms of precision, recall, F1-score, and accuracy. To compare with the state of the art, we dominated the results of previous Arabic SL recognition models in terms of accuracy. In comparison, the MobileNetV2 model has a lower computional complexity; for example, as the MobileNetV2 has 1.8 million fewer training parameters as compared to the proposed model. In future, we aim to use model-pronening or quantization algorithms to reduce the learning parameters and model size to increase the model’s efficiency.
Author Contributions
Conceptualization, A.K. and S.H.; methodology, A.K. and M.I.; software, S.H. and M.I.; validation, S.H. and M.A.; formal analysis, M.I. and S.H.; investigation, S.H. and M.A.; resources, S.H., M.A. and M.I.; data curation, S.A., A.K. T.M.A. and A.A. writing—original draft preparation, S.H., M.A. and S.A.; writing—review and editing, A.K., M.I., T.M.A. and A.A.; visualization, A.K., S.H., M.A., T.M.A. and S.A., supervision, S.H. and M.I. project administration S.A., A.K. and A.A.; funding acquisition, M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data is available upon request.
Acknowledgments
The researchers would like to thank the Deanship of Scientific Research, Qassim University for funding the publication of this project.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Shukla, P.; Garg, A.; Sharma, K.; Mittal, A. A DTW and fourier descriptor based approach for Indian sign language recognition. In Proceedings of the 2015 Third International Conference on Image Information Processing (ICIIP), Waknaghat, India, 21–24 December 2015; pp. 113–118. [Google Scholar]
- Kushalnagar, R. Deafness and hearing loss. In Web Accessibility; Springer: Berlin/Heidelberg, Germany, 2019; pp. 35–47. [Google Scholar]
- Almasre, M.A.; Al-Nuaim, H. A comparison of Arabic sign language dynamic gesture recognition models. Heliyon 2020, 6, e03554. [Google Scholar] [CrossRef] [PubMed]
- Elons, A.S.; Abull-Ela, M.; Tolba, M.F. A proposed PCNN features quality optimization technique for pose-invariant 3D Arabic sign language recognition. Appl. Soft Comput. 2013, 13, 1646–1660. [Google Scholar] [CrossRef]
- Tharwat, A.; Gaber, T.; Hassanien, A.E.; Shahin, M.K.; Refaat, B. Sift-based arabic sign language recognition system. In Proceedings of the Afro-European Conference for Industrial Advancement; Springer: Berlin/Heidelberg, Germany, 2015; pp. 359–370. [Google Scholar]
- Shahin, A.; Almotairi, S. Automated Arabic sign language recognition system based on deep transfer learning. IJCSNS Int. J. Comput. Sci. Netw. Secur. 2019, 19, 144–152. [Google Scholar]
- Bencherif, M.A.; Algabri, M.; Mekhtiche, M.A.; Faisal, M.; Alsulaiman, M.; Mathkour, H.; Al-Hammadi, M.; Ghaleb, H. Arabic sign language recognition system using 2D hands and body skeleton data. IEEE Access 2021, 9, 59612–59627. [Google Scholar] [CrossRef]
- Mustafa, M. A study on Arabic sign language recognition for differently abled using advanced machine learning classifiers. J. Ambient Intell. Humaniz. Comput. 2021, 12, 4101–4115. [Google Scholar] [CrossRef]
- Hisham, B.; Hamouda, A. Supervised learning classifiers for Arabic gestures recognition using Kinect V2. SN Appl. Sci. 2019, 1, 1–21. [Google Scholar] [CrossRef]
- Maraqa, M.; Al-Zboun, F.; Dhyabat, M.; Zitar, R.A. Recognition of Arabic sign language (ArSL) using recurrent neural networks. J. Intell. Learn. Syst. Appl. 2012, 4, 41–52. [Google Scholar] [CrossRef]
- Alzohairi, R.; Alghonaim, R.; Alshehri, W.; Aloqeely, S. Image based Arabic sign language recognition system. Int. J. Adv. Comput. Sci. Appl. 2018, 9, 185–194. [Google Scholar] [CrossRef]
- Duwairi, R.M.; Halloush, Z.A. Automatic recognition of Arabic alphabets sign language using deep learning. Int. J. Electr. Comput. Eng. (2088-8708) 2022, 12, 2996–3004. [Google Scholar] [CrossRef]
- Hu, Z.; Zhang, Y.; Xing, Y.; Zhao, Y.; Cao, D.; Lv, C. Toward human-centered automated driving: A novel spatial-temporal vision transformer-enabled head tracker. IEEE Veh. Technol. Mag. 2022, 17, 57–64. [Google Scholar] [CrossRef]
- Youssif, A.A.; Aboutabl, A.E.; Ali, H.H. Arabic sign language (arsl) recognition system using hmm. Int. J. Adv. Comput. Sci. Appl. 2011, 2, 45–51. [Google Scholar]
- Abdo, M.; Hamdy, A.; Salem, S.; Saad, E.M. Arabic alphabet and numbers sign language recognition. Int. J. Adv. Comput. Sci. Appl. 2015, 6, 209–214. [Google Scholar]
- El-Bendary, N.; Zawbaa, H.M.; Daoud, M.S.; Hassanien, A.E.; Nakamatsu, K. Arslat: Arabic sign language alphabets translator. In Proceedings of the 2010 International Conference on Computer Information Systems and Industrial Management Applications (CISIM), Krakow, Poland, 8–10 October 2010; pp. 590–595. [Google Scholar]
- ElBadawy, M.; Elons, A.; Shedeed, H.A.; Tolba, M. Arabic sign language recognition with 3d convolutional neural networks. In Proceedings of the 2017 Eighth International Conference on Intelligent Computing and Information Systems (ICICIS), Cairo, Egypt, 5–7 December 2017; pp. 66–71. [Google Scholar]
- Hayani, S.; Benaddy, M.; El Meslouhi, O.; Kardouchi, M. Arab sign language recognition with convolutional neural networks. In Proceedings of the 2019 International Conference of Computer Science and Renewable Energies (ICCSRE), Agadir, Morocco, 22–24 July 2019; pp. 1–4. [Google Scholar]
- Kayalibay, B.; Jensen, G.; van der Smagt, P. CNN-based segmentation of medical imaging data. arXiv 2017, arXiv:1701.03056. [Google Scholar]
- Hossain, M.S.; Muhammad, G. Emotion recognition using secure edge and cloud computing. Inf. Sci. 2019, 504, 589–601. [Google Scholar] [CrossRef]
- Kamruzzaman, M. E-crime management system for future smart city. In Data Processing Techniques and Applications for Cyber-Physical Systems (DPTA 2019); Springer: Berlin/Heidelberg, Germany, 2020; pp. 261–271. [Google Scholar]
- Oyedotun, O.K.; Khashman, A. Deep learning in vision-based static hand gesture recognition. Neural Comput. Appl. 2017, 28, 3941–3951. [Google Scholar] [CrossRef]
- Pigou, L.; Dieleman, S.; Kindermans, P.-J.; Schrauwen, B. Sign Language Recognition Using Convolutional Neural Networks; Springer International Publishing: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Hu, Z.; Hu, Y.; Liu, J.; Wu, B.; Han, D.; Kurfess, T. A CRNN module for hand pose estimation. Neurocomputing 2019, 333, 157–168. [Google Scholar] [CrossRef]
- Ahmed, S.; Islam, M.; Hassan, J.; Ahmed, M.U.; Ferdosi, B.J.; Saha, S.; Shopon, M. Hand sign to Bangla speech: A deep learning in vision based system for recognizing hand sign digits and generating Bangla speech. arXiv 2019, arXiv:1901.05613. [Google Scholar] [CrossRef]
- Côté-Allard, U.; Fall, C.L.; Drouin, A.; Campeau-Lecours, A.; Gosselin, C.; Glette, K.; Laviolette, F.; Gosselin, B. Deep learning for electromyographic hand gesture signal classification using transfer learning. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 760–771. [Google Scholar] [CrossRef]
- Hu, Z.; Xing, Y.; Lv, C.; Hang, P.; Liu, J. Deep convolutional neural network-based Bernoulli heatmap for head pose estimation. Neurocomputing 2021, 436, 198–209. [Google Scholar] [CrossRef]
- Si, Y.; Chen, S.; Li, M.; Li, S.; Pei, Y.; Guo, X. Flexible strain sensors for wearable hand gesture recognition: From devices to systems. Adv. Intell. Syst. 2022, 4, 2100046. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, Y.; Liu, C.; Liu, H. sEMG based hand gesture recognition with deformable convolutional network. Int. J. Mach. Learn. Cybern. 2022, 13, 1729–1738. [Google Scholar] [CrossRef]
- Alam, M.M.; Islam, M.T.; Rahman, S.M. Unified learning approach for egocentric hand gesture recognition and fingertip detection. Pattern Recognit. 2022, 121, 108200. [Google Scholar] [CrossRef]
- Chenyi, Y.; Yuqing, H.; Junyuan, Z.; Guorong, L. Lightweight neural network hand gesture recognition method for embedded platforms. High Power Laser Particle Beams 2022, 34, 031023. [Google Scholar]
- Joudaki, S.; Rehman, A. Dynamic hand gesture recognition of sign language using geometric features learning. Int. J. Comput. Vis. Robot. 2022, 12, 1–16. [Google Scholar] [CrossRef]
- Tubaiz, N.; Shanableh, T.; Assaleh, K. Glove-based continuous Arabic sign language recognition in user-dependent mode. IEEE Trans. Hum.-Mach. Syst. 2015, 45, 526–533. [Google Scholar] [CrossRef]
- Al-Buraiky, S.M. Arabic Sign Language Recognition Using an Instrumented Glove; King Fahd University of Petroleum and Minerals: Dhahran, Saudi Arabia, 2004. [Google Scholar]
- Hu, Z.; Hu, Y.; Wu, B.; Liu, J.; Han, D.; Kurfess, T. Hand pose estimation with multi-scale network. Appl. Intell. 2018, 48, 2501–2515. [Google Scholar] [CrossRef]
- Halawani, S.M. Arabic sign language translation system on mobile devices. IJCSNS Int. J. Comput. Sci. Netw. Secur. 2008, 8, 251–256. [Google Scholar]
- Mohandes, M.; Deriche, M.; Liu, J. Image-based and sensor-based approaches to Arabic sign language recognition. IEEE Trans. Hum.-Mach. Syst. 2014, 44, 551–557. [Google Scholar] [CrossRef]
- Almasre, M.A.; Al-Nuaim, H. Comparison of four SVM classifiers used with depth sensors to recognize Arabic sign language words. Computers 2017, 6, 20. [Google Scholar] [CrossRef]
- Hu, Z.; Lv, C.; Hang, P.; Huang, C.; Xing, Y. Data-driven estimation of driver attention using calibration-free eye gaze and scene features. IEEE Trans. Ind. Electron. 2021, 69, 1800–1808. [Google Scholar] [CrossRef]
- Alawwad, R.A.; Bchir, O.; Ismail, M.M.B. Arabic Sign Language Recognition using Faster R-CNN. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 692–700. [Google Scholar] [CrossRef]
- Althagafi, A.; Alsubait, G.T.; Alqurash, T. ASLR: Arabic sign language recognition using convolutional neural networks. IJCSNS Int. J. Comput. Sci. Netw. Secur. 2020, 20, 124–129. [Google Scholar]
- Zakariah, M.; Alotaibi, Y.A.; Koundal, D.; Guo, Y.; Mamun Elahi, M. Sign Language Recognition for Arabic Alphabets Using Transfer Learning Technique. Comput. Intell. Neurosci. 2022, 2022, 4567989. [Google Scholar] [CrossRef] [PubMed]
- Latif, G.; Mohammad, N.; AlKhalaf, R.; AlKhalaf, R.; Alghazo, J.; Khan, M. An automatic Arabic sign language recognition system based on deep CNN: An assistive system for the deaf and hard of hearing. Int. J. Comput. Digit. Syst. 2020, 9, 715–724. [Google Scholar] [CrossRef]
- Elsayed, E.K.; Fathy, D.R. Sign language semantic translation system using ontology and deep learning. Int. J. Adv. Comput. Sci. Appl. 2020, 11, 141–147. [Google Scholar] [CrossRef]
- Alani, A.A.; Cosma, G. ArSL-CNN: A convolutional neural network for Arabic sign language gesture recognition. Indones. J. Electr. Eng. Comput. Sci. 2021, 22, 1096–1107. [Google Scholar] [CrossRef]
- Khan, Z.A.; Hussain, T.; Ullah, A.; Rho, S.; Lee, M.; Baik, S.W. Towards Efficient Electricity Forecasting in Residential and Commercial Buildings: A Novel Hybrid CNN with a LSTM-AE based Framework. Sensors 2020, 20, 1399. [Google Scholar] [CrossRef]
- Mishra, K.; Basu, S.; Maulik, U. Graft: A graph based time series data mining framework. Eng. Appl. Artif. Intell. 2022, 110, 104695. [Google Scholar] [CrossRef]
- Yar, H.; Hussain, T.; Agarwal, M.; Khan, Z.A.; Gupta, S.K.; Baik, S.W. Optimized Dual Fire Attention Network and Medium-Scale Fire Classification Benchmark. IEEE Trans. Image Process. 2022, 31, 6331–6343. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Yar, H.; Khan, Z.A.; Ullah, F.U.M.; Ullah, W.; Baik, S.W. A modified YOLOv5 architecture for efficient fire detection in smart cities. Expert Syst. Appl. 2023, 231, 120465. [Google Scholar] [CrossRef]
- Khan, S.U.; Khan, N.; Hussain, T.; Muhammad, K.; Hijji, M.; Del Ser, J.; Baik, S.W. Visual Appearance and Soft Biometrics Fusion for Person Re-identification using Deep Learning. IEEE J. Sel. Top. Signal Process. 2023, 17, 3. [Google Scholar] [CrossRef]
- Khan, S.U.; Haq, I.U.; Khan, N.; Ullah, A.; Muhammad, K.; Chen, H.; Baik, S.W.; de Albuquerque, V.H.C. Efficient Person Re-identification for IoT-Assisted Cyber-Physical Systems. IEEE Internet Things J. 2023. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Lv, Z.; Bellavista, P.; Yang, P.; Baik, S.W. Efficient deep CNN-based fire detection and localization in video surveillance applications. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1419–1434. [Google Scholar] [CrossRef]
- Avula, S.B.; Badri, S.J.; Reddy, G. A Novel forest fire detection system using fuzzy entropy optimized thresholding and STN-based CNN. In Proceedings of the 2020 International Conference on COMmunication Systems & NETworkS (COMSNETS), Bengaluru, India, 7–11 January 2020; pp. 750–755. [Google Scholar]
- Bari, A.; Saini, T.; Kumar, A. Fire detection using deep transfer learning on surveillance videos. In Proceedings of the 2021 Third International Conference on Intelligent Communication Technologies and Virtual Mobile Networks (ICICV), Tirunelveli, India, 4–6 February 2021; pp. 1061–1067. [Google Scholar]
- Khan, Z.A.; Hussain, T.; Baik, S.W. Boosting energy harvesting via deep learning-based renewable power generation prediction. J. King Saud Univ.-Sci. 2022, 34, 101815. [Google Scholar] [CrossRef]
- Pao, Y.-H.; Takefuji, Y. Functional-link net computing: Theory, system architecture, and functionalities. Computer 1992, 25, 76–79. [Google Scholar] [CrossRef]
- Huang, G.-B.; Zhu, Q.-Y.; Siew, C.-K. Extreme learning machine: A new learning scheme of feedforward neural networks. In Proceedings of the 2004 IEEE International Joint Conference on Neural Networks (IEEE Cat. No. 04CH37541), Budapest, Hungary, 25–29 July 2004; pp. 985–990. [Google Scholar]
- Igelnik, B.; Pao, Y.-H. Stochastic choice of basis functions in adaptive function approximation and the functional-link net. IEEE Trans. Neural Netw. 1995, 6, 1320–1329. [Google Scholar] [CrossRef]
- Sun, Y.; Xue, B.; Zhang, M.; Yen, G.G. Evolving deep convolutional neural networks for image classification. IEEE Trans. Evol. Comput. 2019, 24, 394–407. [Google Scholar] [CrossRef]
- Cao, W.; Wang, X.; Ming, Z.; Gao, J. A review on neural networks with random weights. Neurocomputing 2018, 275, 278–287. [Google Scholar] [CrossRef]
- Huang, G.; Liu, Z.; Van Der Maaten, L.; Weinberger, K.Q. Densely connected convolutional networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 4700–4708. [Google Scholar]
- Huang, G.; Liu, Z.; Pleiss, G.; Van Der Maaten, L.; Weinberger, K. Convolutional networks with dense connectivity. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 44, 8704–8716. [Google Scholar] [CrossRef]
- Yar, H.; Hussain, T.; Khan, Z.A.; Koundal, D.; Lee, M.Y.; Baik, S.W. Vision sensor-based real-time fire detection in resource-constrained IoT environments. Comput. Intell. Neurosci. 2021, 2021, 5195508. [Google Scholar] [CrossRef] [PubMed]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).