

First-Arrival Differential Counting for SPAD Array Design †
 , , , , and
, , , , and
Abstract
:1. Introduction
2. Prior Work: SPAD Arrays
3. Key Concept: The FAD Unit
3.1. Implementation
3.1.1. Distinguishing between Single and Dual Photon Events
3.1.2. Recording the Sum Total Photon Events
3.2. FAD Connections
4. The Passive Regime: Encoding the First Arrival as Intensity Difference
4.1. Choice of Architecture
4.2. Principle and Mathematical Formulation
4.3. Analysis
- at the counter, where digital bit storage saturates, and
- at the pixel, where early photon arrivals mask later arrivals.
Dynamic Range Analysis
4.4. Simulation Results
4.5. Proof of Concept Prototype in 180 nm CMOS
5. The Active Regime: Encoding the First Arrival as Depth Difference
5.1. Choice of Architecture
5.2. Principle and Mathematical Formulation
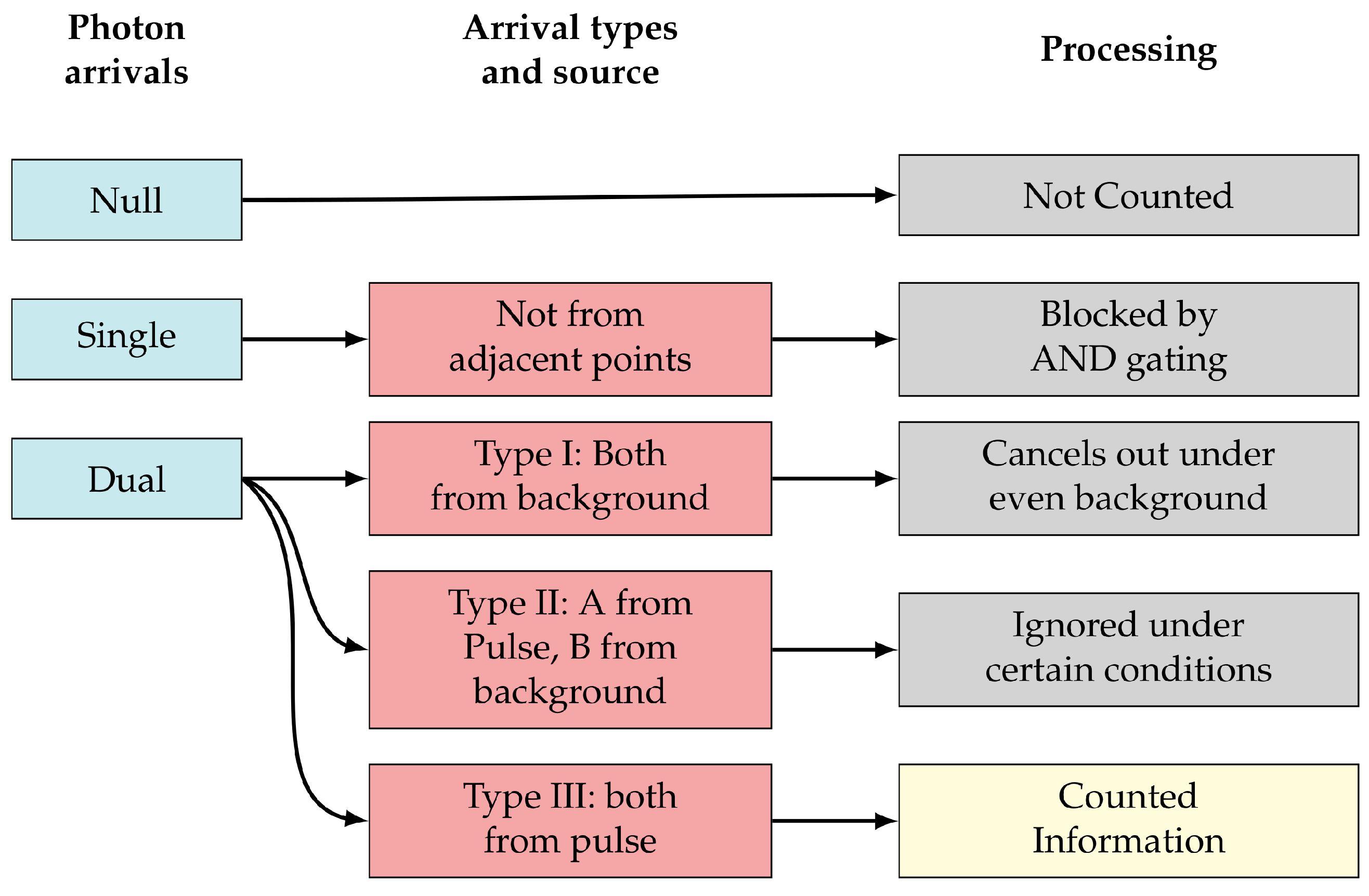
Sorting Photon Arrival Types
- Type I. Photons at both SPADs come from the background. Under relatively constant background conditions, these will, on average, cancel out in equal up/down counts.
- Type II. One SPAD receives a photon from the laser pulse, and the other SPAD receives a photon from the background. Under certain conditions, the number of these events are very small relative to the total counts and can be ignored.
- Type III. Both SPADs receive photons from pulses, providing us with differential time of flight data.
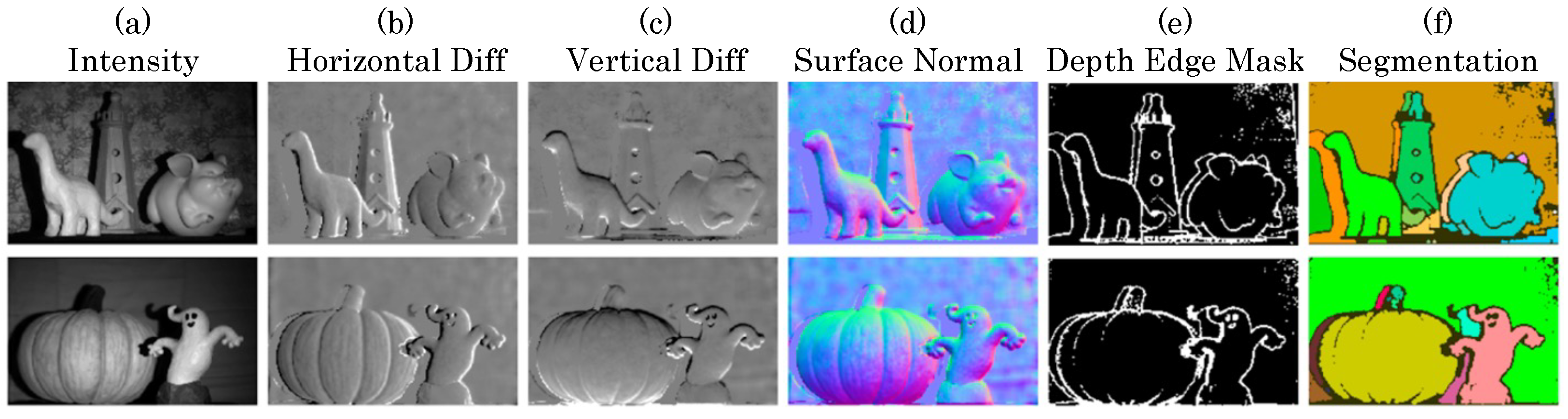
5.3. Edge Inference and Gradient Estimation
Depth Reconstruction Using FAD-LiDAR
5.4. Performance Characterizations
5.4.1. Effects of Albedo Variation and Background
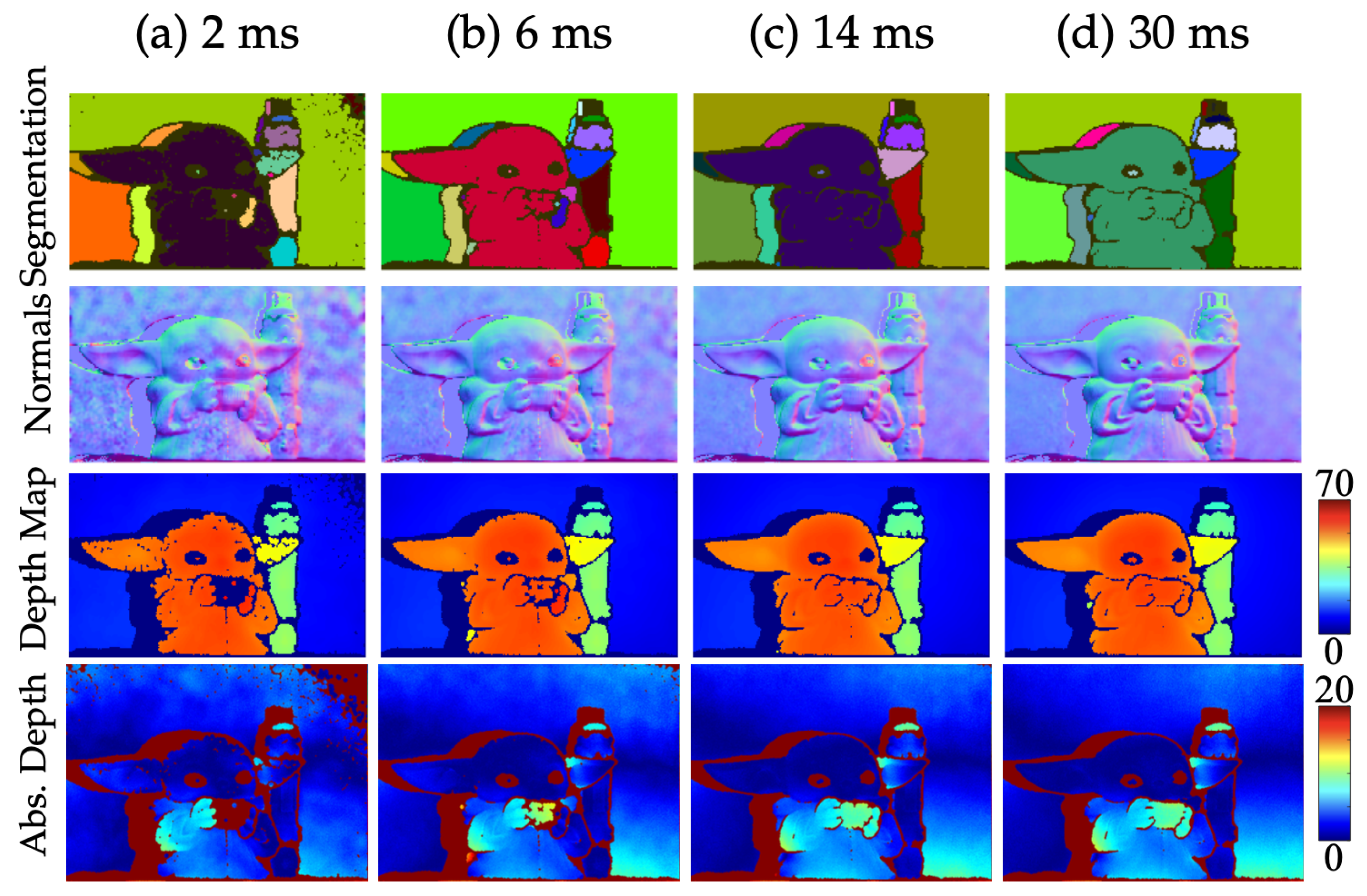
5.4.2. Effect of Exposure
5.4.3. Effect of TDC Sparsity
6. Discussion
6.1. Array Connectivity
6.2. Pixel Response Non-Uniformity (PRNU) and Fixed-Pattern Noise Correction
7. Summary and Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bruschini, C.; Homulle, H.; Antolovic, I.M.; Burri, S.; Charbon, E. Single-photon avalanche diode imagers in biophotonics: Review and outlook. Light Sci. Appl. 2019, 8, 87. [Google Scholar] [CrossRef] [PubMed]
- Villa, F.; Severini, F.; Madonini, F.; Zappa, F. SPADs and SiPMs Arrays for Long-Range High-Speed Light Detection and Ranging (LiDAR). Sensors 2021, 21, 3839. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; White, M.; Dave, A.; Ghajari, S.; Molnar, A.; Veeraraghavan, A. FAD-SPADs: A New Paradigm for Designing Single-Photon Detecting Arrays. In Proceedings of the International Image Sensors Workshop, Edinburgh, UK, 21–25 May 2023. [Google Scholar]
- Zhang, C.; Lindner, S.; Antolović, I.M.; Mata Pavia, J.; Wolf, M.; Charbon, E. A 30-frames/s, 252×144 SPAD Flash LiDAR With 1728 Dual-Clock 48.8-ps TDCs, and Pixel-Wise Integrated Histogramming. IEEE J. Solid-State Circuits 2019, 54, 1137–1151. [Google Scholar] [CrossRef]
- Sheehan, M.P.; Tachella, J.; Davies, M.E. A sketching framework for reduced data transfer in photon counting LiDAR. IEEE Trans. Comput. Imaging 2021, 7, 989–1004. [Google Scholar] [CrossRef]
- Lindell, D.B.; O’Toole, M.; Wetzstein, G. Single-photon 3D imaging with deep sensor fusion. ACM Trans. Graph. 2018, 37, 113. [Google Scholar] [CrossRef]
- Liu, Y.; Gutierrez-Barragan, F.; Ingle, A.; Gupta, M.; Velten, A. Single-photon camera guided extreme dynamic range imaging. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, Waikoloa, HI, USA, 4–8 January 2022; pp. 1575–1585. [Google Scholar]
- Veerappan, C.; Richardson, J.; Walker, R.; Li, D.U.; Fishburn, M.W.; Maruyama, Y.; Stoppa, D.; Borghetti, F.; Gersbach, M.; Henderson, R.K.; et al. A 160 × 128 single-photon image sensor with on-pixel 55ps 10b time-to-digital converter. In Proceedings of the 2011 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 20–24 February 2011; pp. 312–314. [Google Scholar] [CrossRef]
- Gersbach, M.; Maruyama, Y.; Trimananda, R.; Fishburn, M.W.; Stoppa, D.; Richardson, J.A.; Walker, R.; Henderson, R.; Charbon, E. A Time-Resolved, Low-Noise Single-Photon Image Sensor Fabricated in Deep-Submicron CMOS Technology. IEEE J. Solid-State Circuits 2012, 47, 1394–1407. [Google Scholar] [CrossRef]
- Villa, F.; Lussana, R.; Bronzi, D.; Tisa, S.; Tosi, A.; Zappa, F.; Dalla Mora, A.; Contini, D.; Durini, D.; Weyers, S.; et al. CMOS Imager with 1024 SPADs and TDCs for Single-Photon Timing and 3-D Time-of-Flight. IEEE J. Sel. Top. Quantum Electron. 2014, 20, 364–373. [Google Scholar] [CrossRef]
- Vornicu, I.; Carmona-Galán, R.; Rodríguez-Vázquez, Á. Real-Time Inter-Frame Histogram Builder for SPAD Image Sensors. IEEE Sens. J. 2018, 18, 1576–1584. [Google Scholar] [CrossRef]
- Kim, B.; Park, S.; Chun, J.H.; Choi, J.; Kim, S.J. 7.2 A 48 × 40 13.5mm Depth Resolution Flash LiDAR Sensor with In-Pixel Zoom Histogramming Time-to-Digital Converter. In Proceedings of the 2021 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 18–22 February 2021; Volume 64, pp. 108–110. [Google Scholar] [CrossRef]
- Park, S.; Kim, B.; Cho, J.; Chun, J.H.; Choi, J.; Kim, S.J. An 80 × 60 Flash LiDAR Sensor with In-Pixel Histogramming TDC Based on Quaternary Search and Time-Gated Δ-Intensity Phase Detection for 45m Detectable Range and Background Light Cancellation. In Proceedings of the 2022 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 20–26 February 2022; Volume 65, pp. 98–100. [Google Scholar] [CrossRef]
- Zarghami, M.; Gasparini, L.; Parmesan, L.; Moreno-Garcia, M.; Stefanov, A.; Bessire, B.; Unternährer, M.; Perenzoni, M. A 32 × 32-Pixel CMOS Imager for Quantum Optics With Per-SPAD TDC, 19.48% Fill-Factor in a 44.64-μm Pitch Reaching 1-MHz Observation Rate. IEEE J. Solid-State Circuits 2020, 55, 2819–2830. [Google Scholar] [CrossRef]
- Hadfield, R.H.; Leach, J.; Fleming, F.; Paul, D.J.; Tan, C.H.; Ng, J.S.; Henderson, R.K.; Buller, G.S. Single-photon detection for long-range imaging and sensing. Optica 2023, 10, 1124–1141. [Google Scholar] [CrossRef]
- Piron, F.; Morrison, D.; Yuce, M.R.; Redouté, J.M. A Review of Single-Photon Avalanche Diode Time-of-Flight Imaging Sensor Arrays. IEEE Sens. J. 2021, 21, 12654–12666. [Google Scholar] [CrossRef]
- Sesta, V.; Severini, F.; Villa, F.; Lussana, R.; Zappa, F.; Nakamuro, K.; Matsui, Y. Spot Tracking and TDC Sharing in SPAD Arrays for TOF LiDAR. Sensors 2021, 21, 2936. [Google Scholar] [CrossRef] [PubMed]
- Perenzoni, M.; Massari, N.; Perenzoni, D.; Gasparini, L.; Stoppa, D. A 160×120 Pixel Analog-Counting Single-Photon Imager With Time-Gating and Self-Referenced Column-Parallel A/D Conversion for Fluorescence Lifetime Imaging. IEEE J. Solid-State Circuits 2016, 51, 155–167. [Google Scholar] [CrossRef]
- Perenzoni, M.; Perenzoni, D.; Stoppa, D. A 64 × 64-Pixels Digital Silicon Photomultiplier Direct TOF Sensor With 100-MPhotons/s/pixel Background Rejection and Imaging/Altimeter Mode With 0.14% Precision Up To 6 km for Spacecraft Navigation and Landing. IEEE J. Solid-State Circuits 2017, 52, 151–160. [Google Scholar] [CrossRef]
- Perenzoni, M.; Massari, N.; Gasparini, L.; Garcia, M.M.; Perenzoni, D.; Stoppa, D. A Fast 50 × 40-Pixels Single-Point DTOF SPAD Sensor With Photon Counting and Programmable ROI TDCs, with σ < 4 mm at 3 m up to 18 klux of Background Light. IEEE Solid-State Circuits Lett. 2020, 3, 86–89. [Google Scholar] [CrossRef]
- Portaluppi, D.; Conca, E.; Villa, F. 32×32 CMOS SPAD Imager for Gated Imaging, Photon Timing, and Photon Coincidence. IEEE J. Sel. Top. Quantum Electron. 2018, 24, 1–6. [Google Scholar] [CrossRef]
- Lindner, S.; Zhang, C.; Antolovic, I.M.; Wolf, M.; Charbon, E. A 252 × 144 SPAD Pixel Flash Lidar with 1728 Dual-Clock 48.8 PS TDCs, Integrated Histogramming and 14.9-to-1 Compression in 180 nm CMOS Technology. In Proceedings of the 2018 IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 18–22 June 2018; pp. 69–70. [Google Scholar] [CrossRef]
- Sesta, V.; Pasquinelli, K.; Federico, R.; Zappa, F.; Villa, F. Range-Finding SPAD Array With Smart Laser-Spot Tracking and TDC Sharing for Background Suppression. IEEE Open J. Solid-State Circuits Soc. 2022, 2, 26–37. [Google Scholar] [CrossRef]
- Matwyschuk, A.; Bacher, E.; Metzger, N.; Uhring, W.; Le Normand, J.P.; Maciu, O.; Malass, I.; Dumas, N. A real time 3D video CMOS sensor with time gated photon counting. In Proceedings of the 2017 15th IEEE International New Circuits and Systems Conference (NEWCAS), Strasbourg, France, 25–28 June 2017; pp. 57–60. [Google Scholar] [CrossRef]
- Dutton, N.A.W.; Gnecchi, S.; Parmesan, L.; Holmes, A.J.; Rae, B.; Grant, L.A.; Henderson, R.K. 11.5 A time-correlated single-photon-counting sensor with 14GS/S histogramming time-to-digital converter. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference—(ISSCC) Digest of Technical Papers, San Francisco, CA, USA, 22–26 February 2015; pp. 1–3. [Google Scholar] [CrossRef]
- Huang, H.H.; Huang, T.Y.; Liu, C.H.; Lin, S.D.; Lee, C.Y. 32 × 64 SPAD Imager Using 2-bit In-Pixel Stack-Based Memory for Low-Light Imaging. IEEE Sens. J. 2023, 23, 19272–19281. [Google Scholar] [CrossRef]
- Gyongy, I.; Erdogan, A.T.; Dutton, N.A.; Martín, G.M.; Gorman, A.; Mai, H.; Rocca, F.M.D.; Henderson, R.K. A Direct Time-of-flight Image Sensor with in-pixel Surface Detection and Dynamic Vision. IEEE J. Sel. Top. Quantum Electron. 2023, 29, 1–12. [Google Scholar] [CrossRef]
- Tyndall, D.; Rae, B.; Li, D.; Richardson, J.; Arlt, J.; Henderson, R. A 100Mphoton/s time-resolved mini-silicon photomultiplier with on-chip fluorescence lifetime estimation in 0.13 μm CMOS imaging technology. In Proceedings of the 2012 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 19–23 February 2012; pp. 122–124. [Google Scholar] [CrossRef]
- Maruyama, Y.; Blacksberg, J.; Charbon, E. A time-resolved 128 x 128 SPAD camera for laser Raman spectroscopy. In Proceedings of the Next-Generation Spectroscopic Technologies V; Druy, M.A., Crocombe, R.A., Eds.; International Society for Optics and Photonics SPIE: Bellingham, WA, USA, 2012; Volume 8374, p. 83740N. [Google Scholar] [CrossRef]
- Morimoto, K.; Ardelean, A.; Wu, M.L.; Ulku, A.C.; Antolovic, I.M.; Bruschini, C.; Charbon, E. Megapixel time-gated SPAD image sensor for 2D and 3D imaging applications. Optica 2020, 7, 346–354. [Google Scholar] [CrossRef]
- Kumagai, O.; Ohmachi, J.; Matsumura, M.; Yagi, S.; Tayu, K.; Amagawa, K.; Matsukawa, T.; Ozawa, O.; Hirono, D.; Shinozuka, Y.; et al. 7.3 A 189 × 600 Back-Illuminated Stacked SPAD Direct Time-of-Flight Depth Sensor for Automotive LiDAR Systems. In Proceedings of the 2021 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 18–22 February 2021; Volume 64, pp. 110–112. [Google Scholar] [CrossRef]
- Padmanabhan, P.; Zhang, C.; Cazzaniga, M.; Efe, B.; Ximenes, A.R.; Lee, M.J.; Charbon, E. 7.4 A 256×128 3D-Stacked (45nm) SPAD FLASH LiDAR with 7-Level Coincidence Detection and Progressive Gating for 100m Range and 10klux Background Light. In Proceedings of the 2021 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 18–22 February 2021; Volume 64, pp. 111–113. [Google Scholar] [CrossRef]
- Ximenes, A.R.; Padmanabhan, P.; Lee, M.J.; Yamashita, Y.; Yaung, D.N.; Charbon, E. A 256 × 256 45/65nm 3D-stacked SPAD-based direct TOF image sensor for LiDAR applications with optical polar modulation for up to 18.6dB interference suppression. In Proceedings of the 2018 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 11–15 February 2018; pp. 96–98. [Google Scholar] [CrossRef]
- Henderson, R.K.; Johnston, N.; Hutchings, S.W.; Gyongy, I.; Abbas, T.A.; Dutton, N.; Tyler, M.; Chan, S.; Leach, J. A 256 ×256 40nm/90nm CMOS 3D-Stacked 120dB Dynamic-Range Reconfigurable Time-Resolved SPAD Imager. In Proceedings of the 2019 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 17–21 February 2019; pp. 106–108. [Google Scholar] [CrossRef]
- Stoppa, D.; Abovyan, S.; Furrer, D.; Gancarz, R.; Jessenig, T.; Kappel, R.; Lueger, M.; Mautner, C.; Mills, I.; Perenzoni, D.; et al. A reconfigurable QVGA/Q3VGA Direct time-of-flight 3D imaging system with on-chip depth-map computation in 45/40 nm 3D-stacked BSI SPAD CMOS. In Proceedings of the International Image Sensor Workshop (IISW), Online, 20–23 September 2021; pp. 53–56. [Google Scholar]
- Hutchings, S.W.; Johnston, N.; Gyongy, I.; Al Abbas, T.; Dutton, N.A.W.; Tyler, M.; Chan, S.; Leach, J.; Henderson, R.K. A Reconfigurable 3-D-Stacked SPAD Imager With In-Pixel Histogramming for Flash LIDAR or High-Speed Time-of-Flight Imaging. IEEE J. Solid-State Circuits 2019, 54, 2947–2956. [Google Scholar] [CrossRef]
- Al Abbas, T.; Dutton, N.A.W.; Almer, O.; Pellegrini, S.; Henrion, Y.; Henderson, R.K. Backside illuminated SPAD image sensor with 7.83 μmm pitch in 3D-stacked CMOS technology. In Proceedings of the 2016 IEEE International Electron Devices Meeting (IEDM), San Francisco, CA, USA, 3–7 December 2016; pp. 8.1.1–8.1.4. [Google Scholar] [CrossRef]
- Severini, F.; Cusini, I.; Madonini, F.; Brescia, D.; Camphausen, R.; Cuevas, Á.; Tisa, S.; Villa, F. Spatially Resolved Event-Driven 24 × 24 Pixels SPAD Imager With 100 percent Duty Cycle for Low Optical Power Quantum Entanglement Detection. IEEE J. Solid-State Circuits 2023, 58, 2278–2287. [Google Scholar] [CrossRef]
- Ingle, A.; Maier, D. Count-Free Single-Photon 3D Imaging with Race Logic. IEEE Trans. Pattern Anal. Mach. Intell. 2023. early access. [Google Scholar] [CrossRef] [PubMed]
- White, M.; Ghajari, S.; Zhang, T.; Dave, A.; Veeraraghavan, A.; Molnar, A. A Differential SPAD Array Architecture in 0.18 μm CMOS for HDR Imaging. In Proceedings of the 2022 IEEE International Symposium on Circuits and Systems (ISCAS), Austin, TX, USA, 27 May–1 June 2022; pp. 292–296. [Google Scholar] [CrossRef]
- Zhang, T.; White, M.J.; Dave, A.; Ghajari, S.; Raghuram, A.; Molnar, A.C.; Veeraraghavan, A. First Arrival Differential LiDAR. In Proceedings of the 2022 IEEE International Conference on Computational Photography (ICCP), Pasadena, CA, USA, 1–3 August 2022; pp. 1–12. [Google Scholar] [CrossRef]
- Zarghami, M.; Gasparini, L.; Perenzoni, M.; Pancheri, L. High Dynamic Range Imaging with TDC-Based CMOS SPAD Arrays. Instruments 2019, 3, 38. [Google Scholar] [CrossRef]
- Ingle, A.; Velten, A.; Gupta, M. Passive Inter-Photon Imaging. arXiv 2021, arXiv:2104.00059. [Google Scholar]
- Gasparini, L.; Zarghami, M.; Xu, H.; Parmesan, L.; Garcia, M.M.; Unternährer, M.; Bessire, B.; Stefanov, A.; Stoppa, D.; Perenzoni, M. A 32 × 32-pixel time-resolved single-photon image sensor with 44.64 μm pitch and 19.48% fill-factor with on-chip row/frame skipping features reaching 800kHz observation rate for quantum physics applications. In Proceedings of the 2018 IEEE International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 11–15 February 2018; pp. 98–100. [Google Scholar] [CrossRef]
- Gnanasambandam, A.; Chan, S.H. HDR Imaging With Quanta Image Sensors: Theoretical Limits and Optimal Reconstruction. IEEE Trans. Comput. Imaging 2020, 6, 1571–1585. [Google Scholar] [CrossRef]
- Talukder, K.; Harada, K. Haar Wavelet Based Approach for Image Compression and Quality Assessment of Compressed Image. IAENG Int. J. Appl. Math. 2007, 36, 1. [Google Scholar]
- Debevec, P.E. Recovering High Dynamic Range Radiance Maps from Photographs. Available online: https://www.pauldebevec.com/Research/HDR/ (accessed on 6 October 2023).
- Zhang, C.; Zhang, N.; Ma, Z.; Wang, L.; Qin, Y.; Jia, J.; Zang, K. A 240 × 160 3D-Stacked SPAD dToF Image Sensor With Rolling Shutter and In-Pixel Histogram for Mobile Devices. IEEE Open J. Solid-State Circuits Soc. 2022, 2, 3–11. [Google Scholar] [CrossRef]
- Quéau, Y.; Durou, J.D.; Aujol, J.F. Normal integration: A survey. J. Math. Imaging Vis. 2018, 60, 576–593. [Google Scholar] [CrossRef]
- Frankot, R.T.; Chellappa, R. A method for enforcing integrability in shape from shading algorithms. IEEE Trans. Pattern Anal. Mach. Intell. 1988, 10, 439–451. [Google Scholar] [CrossRef]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Application | HDR | LiDAR |
|---|---|---|
| flux | time of arrival | |
| Function | photon-counting | photon-timing |
| Lighting | passive | active |
| TDCs | none | few |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
White, M.; Zhang, T.; Dave, A.; Ghajari, S.; Molnar, A.; Veeraraghavan, A. First-Arrival Differential Counting for SPAD Array Design. Sensors 2023, 23, 9445. https://doi.org/10.3390/s23239445
White M, Zhang T, Dave A, Ghajari S, Molnar A, Veeraraghavan A. First-Arrival Differential Counting for SPAD Array Design. Sensors. 2023; 23(23):9445. https://doi.org/10.3390/s23239445
Chicago/Turabian StyleWhite, Mel, Tianyi Zhang, Akshat Dave, Shahaboddin Ghajari, Alyosha Molnar, and Ashok Veeraraghavan. 2023. "First-Arrival Differential Counting for SPAD Array Design" Sensors 23, no. 23: 9445. https://doi.org/10.3390/s23239445
APA StyleWhite, M., Zhang, T., Dave, A., Ghajari, S., Molnar, A., & Veeraraghavan, A. (2023). First-Arrival Differential Counting for SPAD Array Design. Sensors, 23(23), 9445. https://doi.org/10.3390/s23239445