
Improving the Robustness of Time Difference of Arrival Estimation Based on the Energy Center of Gravity Rearrangement


Abstract
:1. Introduction
- (1)
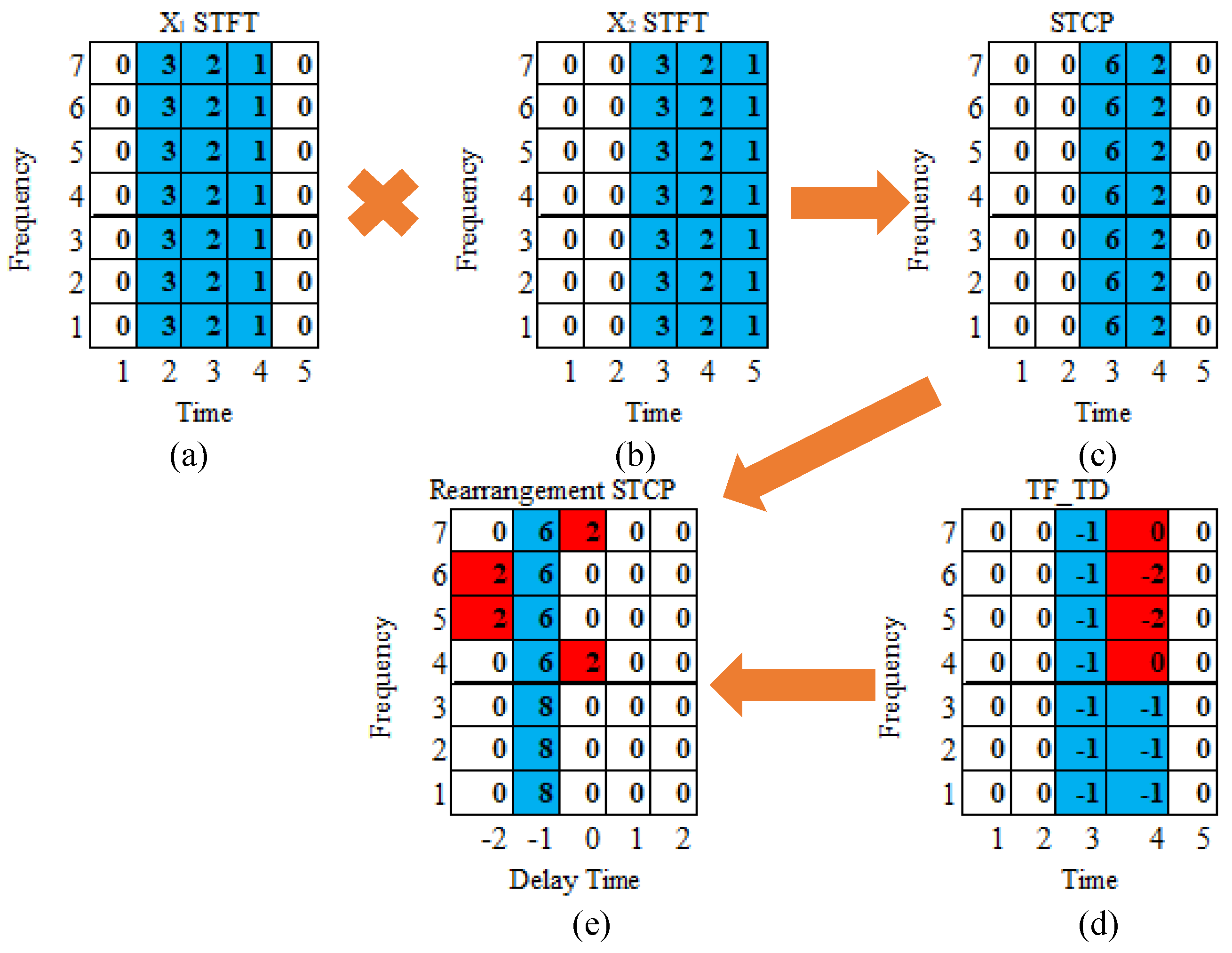
- After rearranging the short-time cross-power spectrum (STCPS) based on the delay characteristics, the TF points with stronger SNR are closer to the actual time-delay ridges;
- (2)
- In each narrow frequency band, the noise power changes slowly over time but remains relatively constant overall.
- (1)
- The theory of time rearrangement synchrosqueezing transform (TRST) is extended to the time difference of arrival estimation, and a time difference rearrangement synchrosqueezing transform algorithm is proposed to enhance the performance of the TDOA estimation by separating the signal from the background noise by exploiting the distinct time delay characteristics;
- (2)
- A second-order-based time difference reassigned synchrosqueezing transform algorithm is developed to improve the robustness of the TDOA estimation by enhancing the TF energy aggregation.
2. Proposed Algorithm
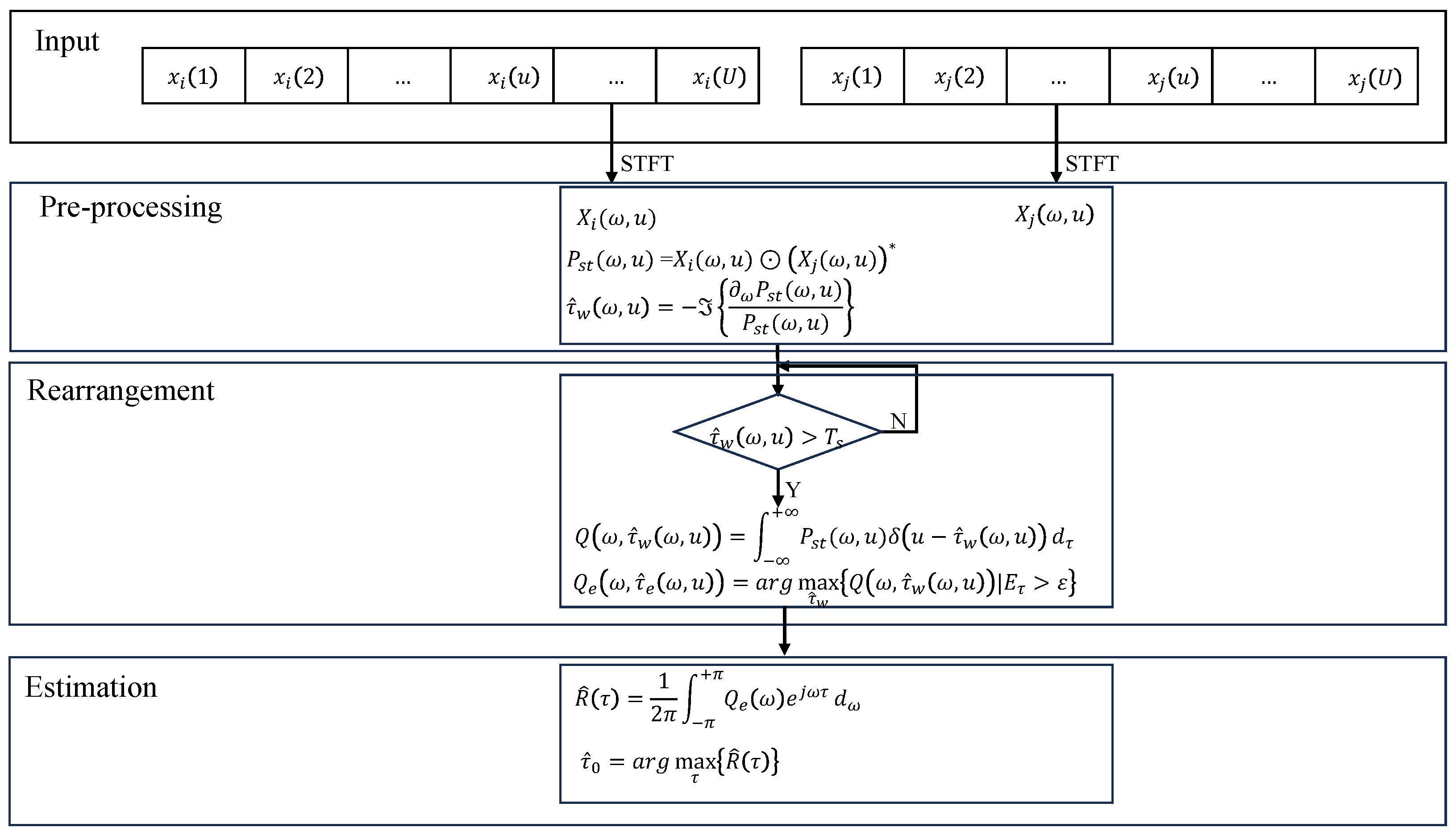
2.1. Time Difference Reassigned Synchrosqueezing Transform Algorithm
2.1.1. Noise-Free TDST Model
2.1.2. Noise-Optimized TDST Model
| Algorithm 1: The time difference reassigned synchrosqueezing transform algorithm. |
| Initialization: |
| Input: |
| Calculate: , based on (10) |
| for k ← 1 to N |
| for b ← 1 to N |
| if then |
| , based on (14) |
| else |
| end if |
| end for |
| end for |
| for k ← 1 to N |
| for b ← -N to (N-1) |
| if |
| , based on (15) |
| end if |
| end for |
| end for |
| , based on (16) |
| , based on (17) |
| , based on (18) |
| , based on (19) |
2.2. Second Order-Based Time-Delay Reassignment Synchrosqueezing Transform Model
| Algorithm 2: The second order-based time difference reassigned synchrosqueezing transform algorithm. |
| Initialization: |
| Input: |
| Calculate: |
| for l ← 1 to 2N |
| for b ← 1 to N |
| if then |
| based on (20) |
| else |
| end if |
| end for |
| end for |
| for l ← 1 to 2N |
| for b ← -N to (N-1) |
| if |
| based on (25) |
| end if |
| end for |
| end for |
| , based on (28) |
| based on (29) |
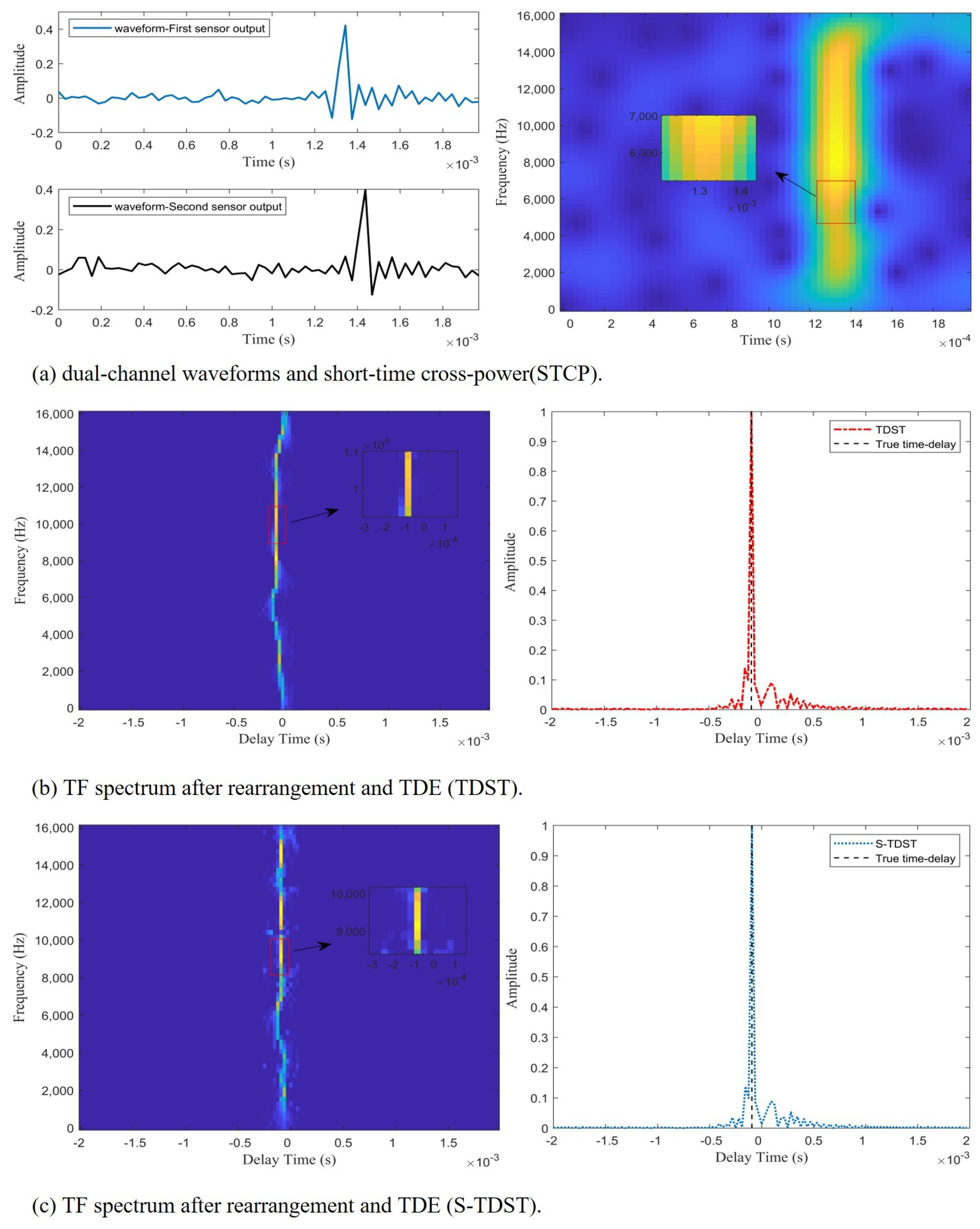
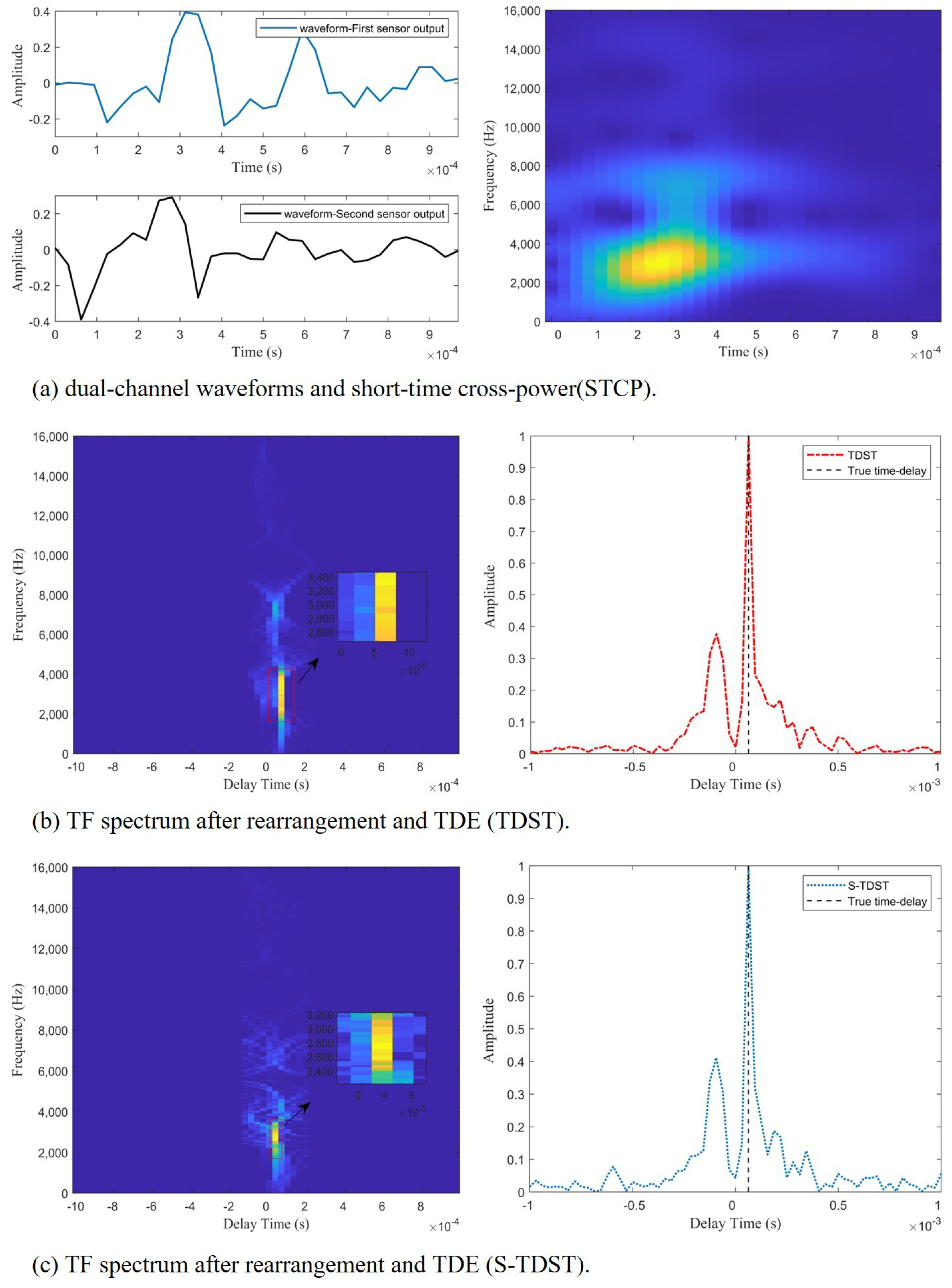
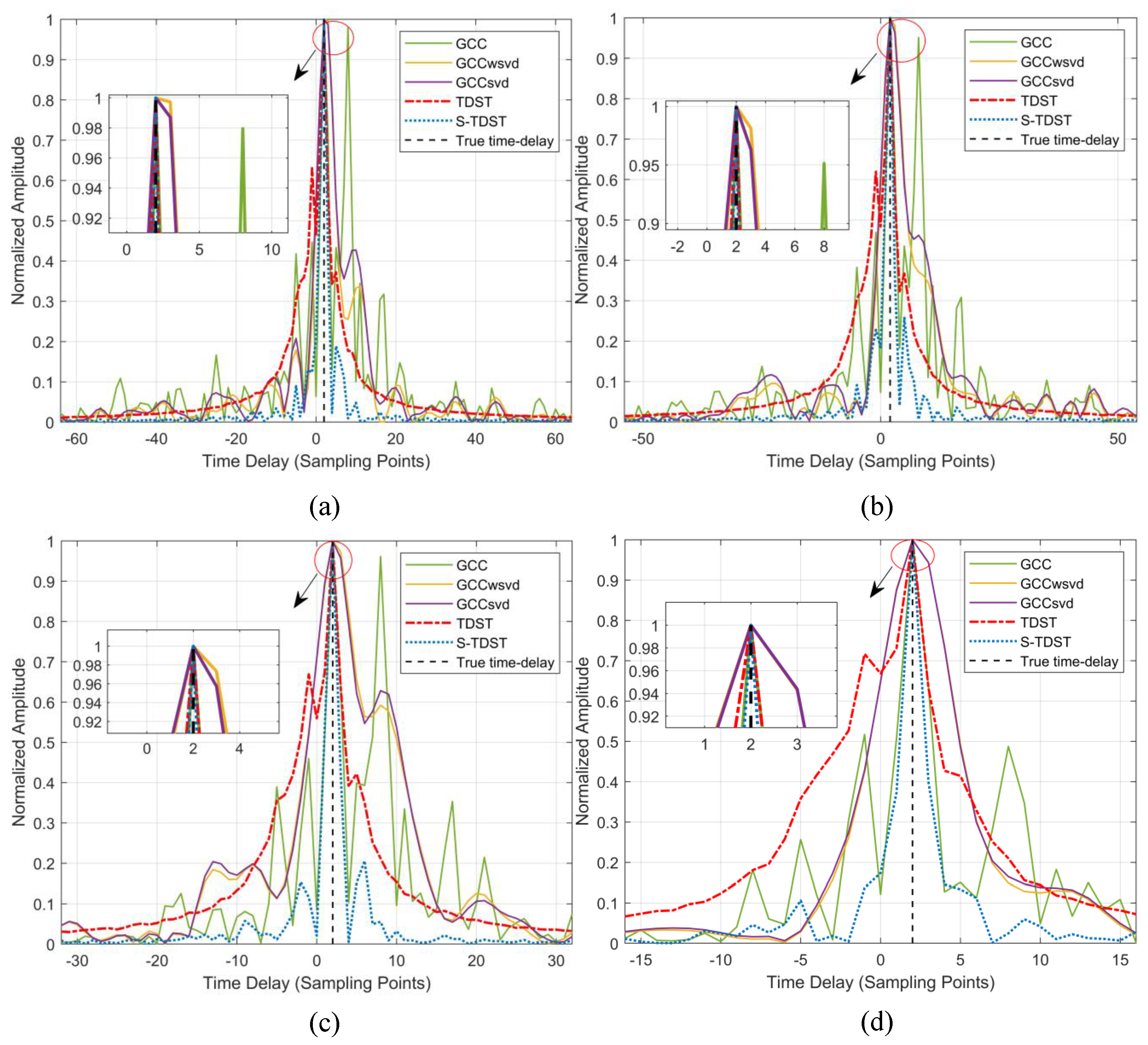
3. Simulation and Experimental Results
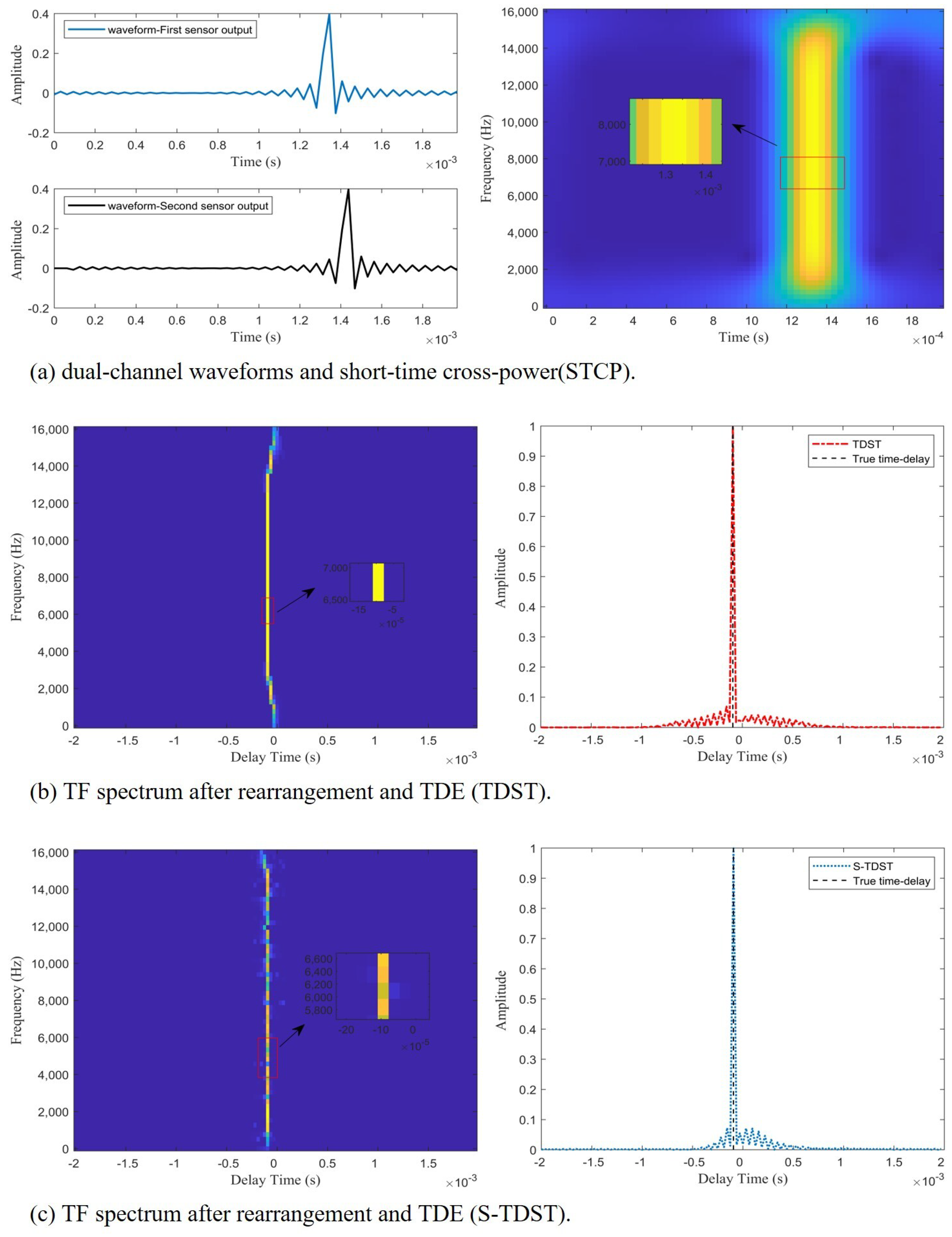
3.1. Simulation Results and Analysis
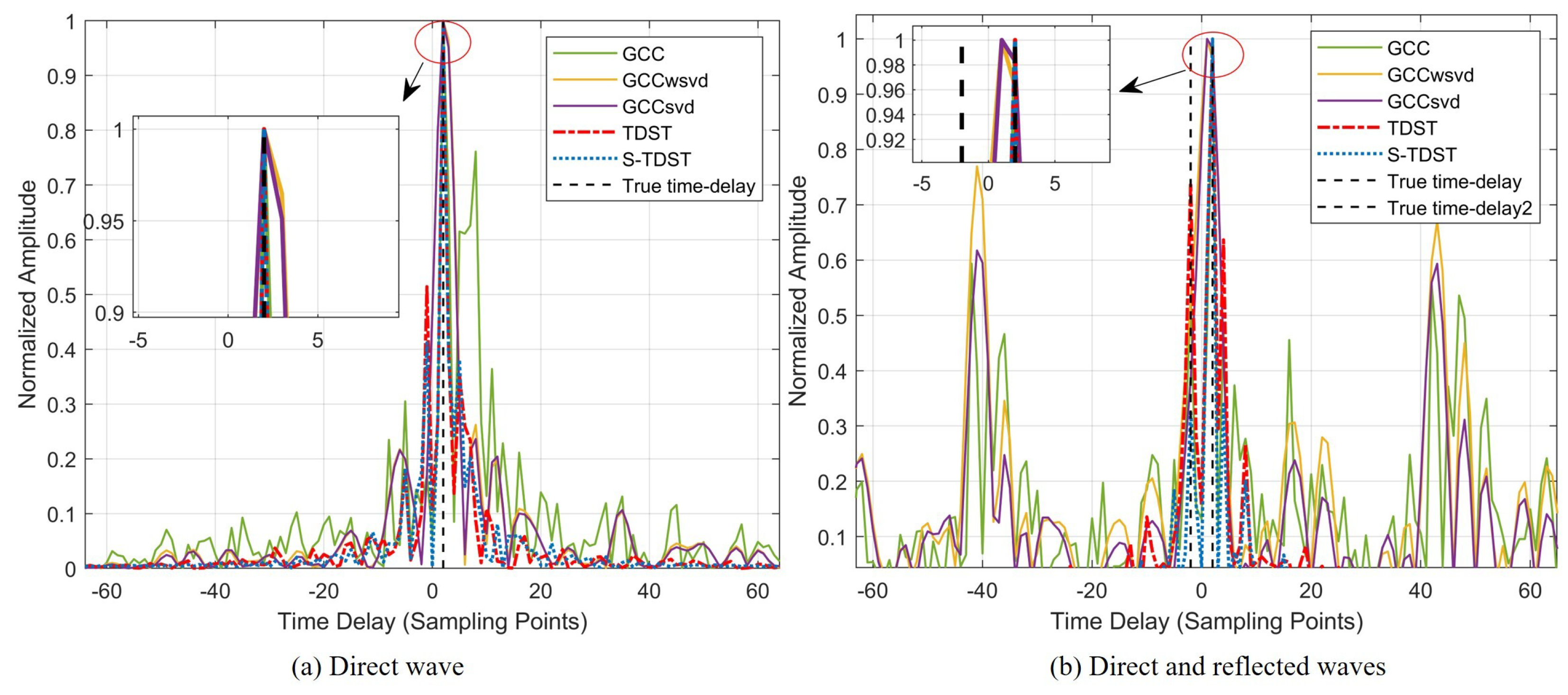
3.2. Experiments under Real-Life Settings
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ma, C.; Wang, L.; Gao, J.; Cui, Y.; Peng, C.; Zhang, S. Time of arrival estimation for underwater acoustic signal using multi-feature fusion. Appl. Acoust. 2023, 211, 109475. [Google Scholar] [CrossRef]
- Vidal-Valladares, M.G.; Díaz, M.A. A Femto-Satellite Localization Method Based on TDOA and AOA Using Two CubeSats. Remote Sens. 2022, 14, 1101. [Google Scholar] [CrossRef]
- Wang, T.; Xiong, H.; Ding, H.; Zheng, L. TDOA-Based Joint Synchronization and Localization Algorithm for Asynchronous Wireless Sensor Networks. IEEE Trans. Commun. 2020, 68, 3107–3124. [Google Scholar] [CrossRef]
- Fereidoony, F.; Jishi, A.; Hedayati, M.; Wang, Y.E.; Kowdley, S. Magnitude—Delay Least Mean Squares Equalization for Accurate Estimation of Time of Arrival. IEEE Sens. J. 2021, 21, 18075–18084. [Google Scholar] [CrossRef]
- Dang, X.; Ma, W.; Habets, E.A.P.; Zhu, H. TDOA-Based Robust Sound Source Localization With Sparse Regularization in Wireless Acoustic Sensor Networks. IEEE/ACM Trans. Audio Speech Lang. Process. 2022, 30, 1108–1123. [Google Scholar] [CrossRef]
- Wang, Y.; Sun, G.C.; Wang, Y.; Yang, J.; Zhang, Z.; Xing, M. A Multi-Pulse Cross Ambiguity Function for the Wideband TDOA and FDOA to Locate an Emitter Passively. Remote Sens. 2022, 14, 3545. [Google Scholar] [CrossRef]
- Li, S.; Sun, H.; Esmaiel, H. Underwater TDOA Acoustical Location Based on Majorization-Minimization Optimization. Sensors 2020, 20, 4457. [Google Scholar] [CrossRef]
- Zou, Y.; Liu, H. TDOA Localization With Unknown Signal Propagation Speed and Sensor Position Errors. IEEE Commun. Lett. 2020, 24, 1024–1027. [Google Scholar] [CrossRef]
- Li, Q.; Chen, B.; Yang, M. Improved Two-Step Constrained Total Least-Squares TDOA Localization Algorithm Based on the Alternating Direction Method of Multipliers. IEEE Sens. J. 2020, 20, 13666–13673. [Google Scholar] [CrossRef]
- Hu, Y.; Peng, A.; Tang, B.; Ou, G.; Lu, X. The Time-of-Arrival Offset Estimation in Neural Network Atomic Denoising in Wireless Location. Sensors 2022, 22, 5364. [Google Scholar] [CrossRef]
- Wang, W.; Zhu, M.; Yang, B. Two High-Precision Ultrashort Baseline Location Methods Based on Phase Difference. IEEE Trans. Instrum. Meas. 2023, 72, 1–12. [Google Scholar] [CrossRef]
- Song, Q.; Ma, X. High-Resolution Time Delay Estimation Algorithms Through Cross-Correlation Post-Processing. IEEE Signal Process. Lett. 2021, 28, 479–483. [Google Scholar] [CrossRef]
- Deng, Z.; Zheng, X.; Wang, H.; Fu, X.; Yin, L.; Liu, W. A Novel Time Delay Estimation Algorithm for 5G Vehicle Positioning in Urban Canyon Environments. Sensors 2020, 20, 5190. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Jin, Y.; Wu, Y.; Hao, C.; Orlando, D. Sparsity-Based Time Delay Estimation Through the Matched Filter Outputs. IEEE Signal Process. Lett. 2022, 29, 1769–1773. [Google Scholar] [CrossRef]
- Knapp, C.; Carter, G. The generalized correlation method for estimation of time delay. IEEE Trans. Acoust. Speech Signal Process. 1976, 24, 320–327. [Google Scholar] [CrossRef]
- Chen, J.; Benesty, J.; Huang, Y. Robust time delay estimation exploiting redundancy among multiple microphones. IEEE Trans. Speech Audio Process. 2003, 11, 549–557. [Google Scholar] [CrossRef]
- He, H.; Chen, J.; Benesty, J.; Zhang, W.; Yang, T. A class of multichannel sparse linear prediction algorithms for time delay estimation of speech sources. Signal Process. 2020, 169, 107395. [Google Scholar] [CrossRef]
- Cobos, M.; Antonacci, F.; Comanducci, L.; Sarti, A. Frequency-Sliding Generalized Cross-Correlation: A Sub-Band Time Delay Estimation Approach. IEEE/ACM Trans. Audio Speech Lang. Process. 2020, 28, 1270–1281. [Google Scholar] [CrossRef]
- Ge, F.X.; Shen, D.; Peng, Y.; Li, V.O.K. Super-Resolution Time Delay Estimation in Multipath Environments. IEEE Trans. Circuits Syst. I Regul. Pap. 2007, 54, 1977–1986. [Google Scholar] [CrossRef]
- Ma, J.; Zhang, J.; Yang, Z.; Liu, H.; Wan, L.; Qiu, T. Super-resolution time delay estimation using exponential kernel correlation in impulsive noise and multipath environments. Digit. Signal Process. 2023, 133, 103882. [Google Scholar] [CrossRef]
- Yao, S.; Meng, Q.; Chen, C.; Tariq, I. A DPTF algorithm for the time-delay estimation in the reflected environment. Digit. Signal Process. 2022, 127, 103534. [Google Scholar] [CrossRef]
- Li, J.; Lv, S.; Lv, L.; Wu, S.; Liu, Y.; Nie, J.; Jin, Y.; Wang, C. Joint TDOA, FDOA and PDOA Localization Approaches and Performance Analysis. Remote Sens. 2023, 15, 915. [Google Scholar] [CrossRef]
- Dai, Z.; Wang, G.; Jin, X.; Lou, X. Nearly Optimal Sensor Selection for TDOA-Based Source Localization in Wireless Sensor Networks. IEEE Trans. Veh. Technol. 2020, 69, 12031–12042. [Google Scholar] [CrossRef]
- Faerman, V.; Avramchuk, V.; Voevodin, K.; Sidorov, I.; Kostyuchenko, E. Study of Generalized Phase Spectrum Time Delay Estimation Method for Source Positioning in Small Room Acoustic Environment. Sensors 2022, 22, 965. [Google Scholar] [CrossRef] [PubMed]
- Yu, K.; Chu, F.; Wang, X.; Cheng, Y. Frequency-Domain Energy-Concentrated Synchrosqueezing Transform for Frequency-Varying Signal With Linear Group Delay. IEEE Trans. Instrum. Meas. 2022, 71, 1–15. [Google Scholar] [CrossRef]
- Li, W.; Zhang, Z.; Auger, F.; Zhu, X. Theoretical analysis of time-reassigned synchrosqueezing wavelet transform. Appl. Math. Lett. 2022, 132, 108141. [Google Scholar] [CrossRef]
- Meignen, S.; Singh, N. Analysis of Reassignment Operators Used in Synchrosqueezing Transforms: With an Application to Instantaneous Frequency Estimation. IEEE Trans. Signal Process. 2022, 70, 216–227. [Google Scholar] [CrossRef]
- He, D.; Cao, H.; Wang, S.; Chen, X. Time-reassigned synchrosqueezing transform: The algorithm and its applications in mechanical signal processing. Mech. Syst. Signal Process. 2019, 117, 255–279. [Google Scholar] [CrossRef]
- Liu, Q.; Wang, Y.; Xu, Y. Synchrosqueezing extracting transform and its application in bearing fault diagnosis under non-stationary conditions. Measurement 2021, 173, 108569. [Google Scholar] [CrossRef]
- Li, Y.; Shi, Z.; Lin, T.R.; Yu, G. An iterative reassignment based energy-concentrated TFA post-processing tool and application to bearing fault diagnosis. Measurement 2022, 193, 110953. [Google Scholar] [CrossRef]
- He, Y.; Hu, M.; Jiang, Z.; Feng, K.; Ming, X. Local maximum synchrosqueezes from entropy matching chirplet transform. Mech. Syst. Signal Process. 2022, 181, 109476. [Google Scholar] [CrossRef]
- Sandoval, S.; De Leon, P.L. Recasting the (Synchrosqueezed) Short-Time Fourier Transform as an Instantaneous Spectrum. Entropy 2022, 24, 518. [Google Scholar] [CrossRef] [PubMed]
- Yi, C.; Qin, J.; Xiao, H.; Zhou, T. Second-order Synchrosqueezing Modified S Transform for wind turbine fault diagnosis. Appl. Acoust. 2022, 189, 108614. [Google Scholar] [CrossRef]
- Zhou, C.; Cao, H.; Wang, X.; Ding, J. Second-order Iterative Time-rearrangement Synchrosqueezing Transform and its application to rolling bearing fault diagnosis. Measurement 2022, 190, 110730. [Google Scholar] [CrossRef]
- Fang, Y.; Hu, Y.; Li, M.; Chen, H.; Chen, X.; Li, J. Second-Order Horizontal Multi-Synchrosqueezing Transform for Hydrocarbon Reservoir Identification. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Dong, H.; Yu, G.; Li, Y. Theoretical analysis and comparison of transient-extracting transform and time-reassigned synchrosqueezing transform. Mech. Syst. Signal Process. 2022, 178, 109190. [Google Scholar] [CrossRef]
- Chen, Z.; Zi, Y.; Xiao, Z.; Wang, Y.; Qing, S. A Bilateral Second-Order Synchrosqueezing Transform and Application to Vibration Monitoring of Aerospace Engine. IEEE Trans. Instrum. Meas. 2021, 70, 1–15. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | GCC | GCC-svd | GCC-wsvd | TDST | TDST |
|---|---|---|---|---|---|
| Time (ms) | 0.3405 | 0.2223 | 0.1660 | 18.1 | 41.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, P.; Wen, H.; Xu, Z.; Zhao, Z. Improving the Robustness of Time Difference of Arrival Estimation Based on the Energy Center of Gravity Rearrangement. Sensors 2023, 23, 9720. https://doi.org/10.3390/s23249720
Zhang P, Wen H, Xu Z, Zhao Z. Improving the Robustness of Time Difference of Arrival Estimation Based on the Energy Center of Gravity Rearrangement. Sensors. 2023; 23(24):9720. https://doi.org/10.3390/s23249720
Chicago/Turabian StyleZhang, Peng, Hongyuan Wen, Zhiyong Xu, and Zhao Zhao. 2023. "Improving the Robustness of Time Difference of Arrival Estimation Based on the Energy Center of Gravity Rearrangement" Sensors 23, no. 24: 9720. https://doi.org/10.3390/s23249720
APA StyleZhang, P., Wen, H., Xu, Z., & Zhao, Z. (2023). Improving the Robustness of Time Difference of Arrival Estimation Based on the Energy Center of Gravity Rearrangement. Sensors, 23(24), 9720. https://doi.org/10.3390/s23249720