
Single-Element Dual-Interferometer for Precision Inertial Sensing: Sub-Picometer Structural Stability and Performance as a Reference for Laser Frequency Stabilization

 , , , , , , , ,
, , , , , , , ,
Abstract
:1. Introduction
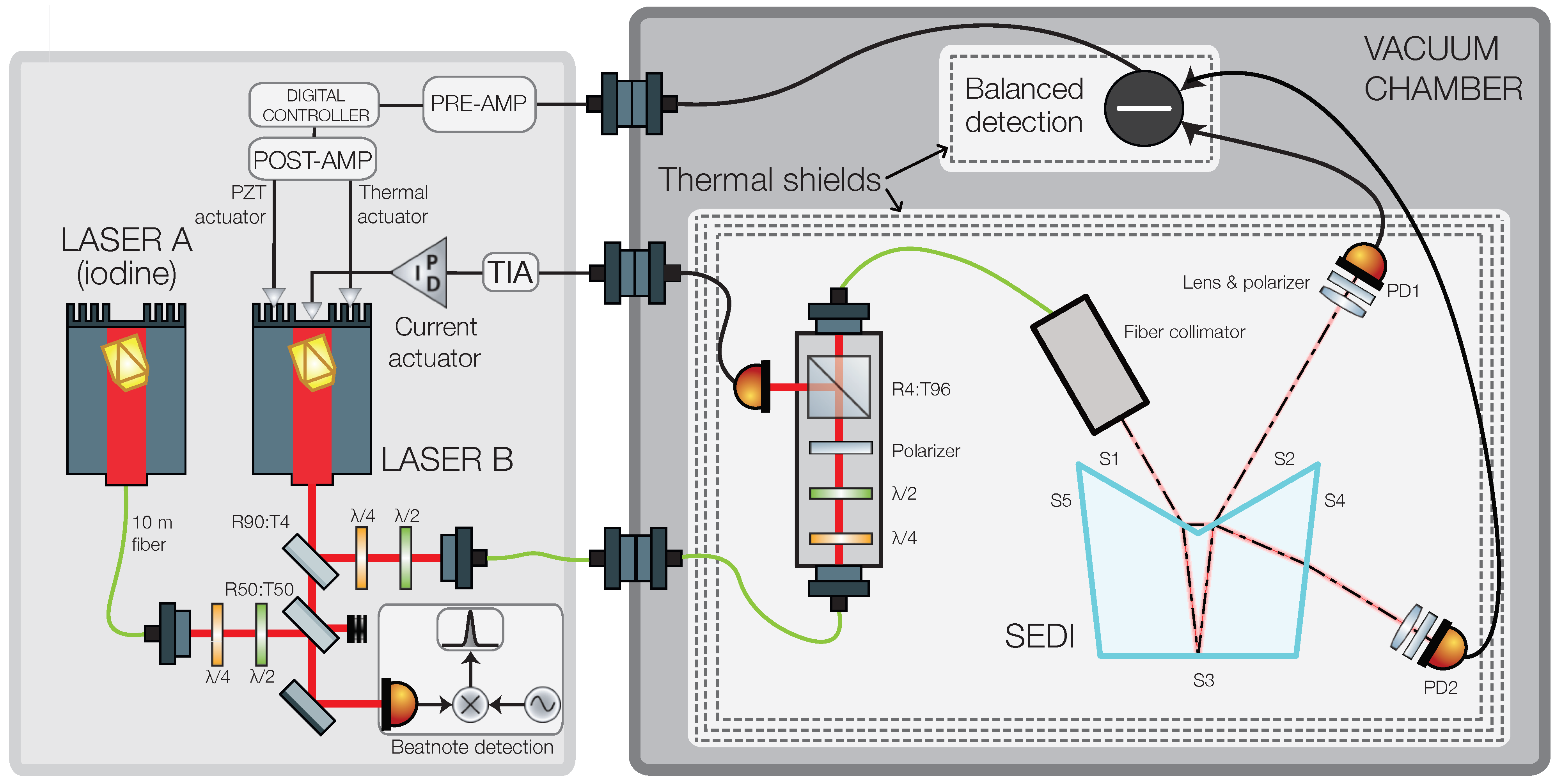
2. Experimental Setup
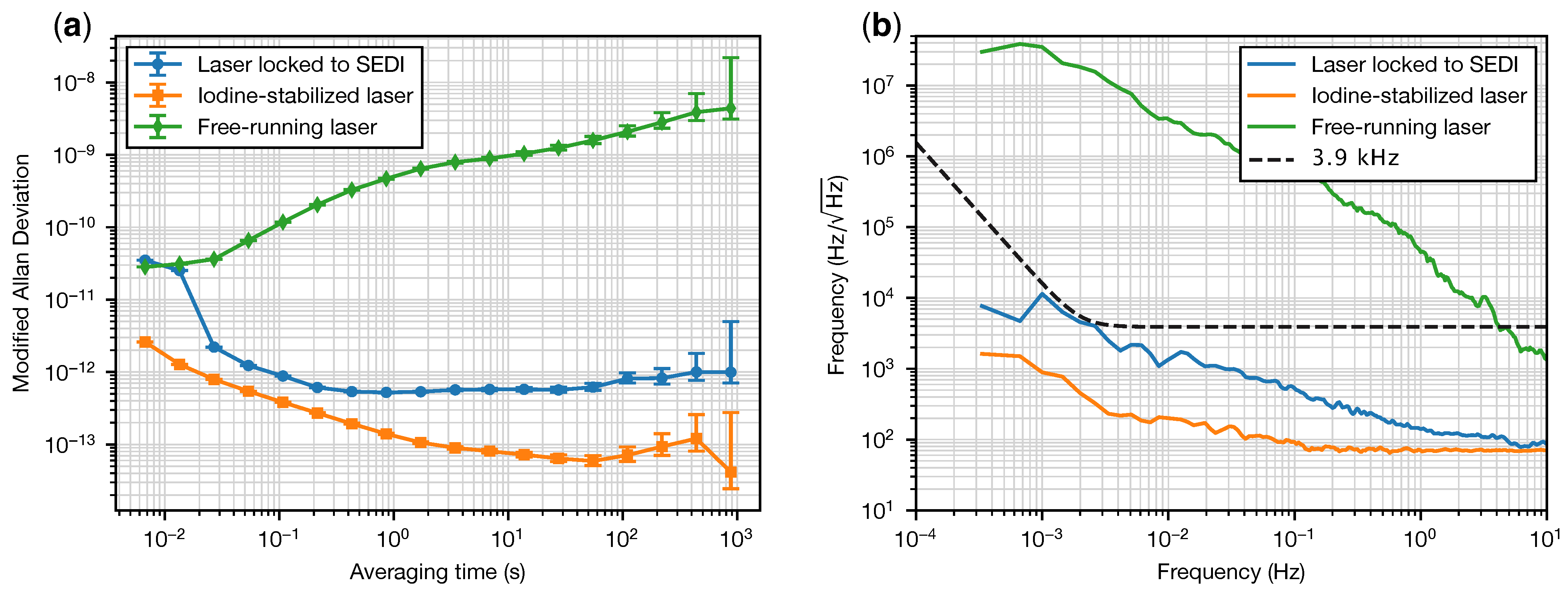
3. Results
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kornfeld, R.P.; Arnold, B.W.; Gross, M.A.; Dahya, N.T.; Klipstein, W.M.; Gath, P.F.; Bettadpur, S. GRACE-FO: The gravity recovery and climate experiment follow-on mission. J. Spacecr. Rocket. 2019, 56, 931–951. [Google Scholar] [CrossRef]
- Weber, W.J.; Bortoluzzi, D.; Bosetti, P.; Consolini, G.; Dolesi, R.; Vitale, S. Application of LISA Gravitational Reference Sensor Hardware to Future Intersatellite Geodesy Missions. Remote Sens. 2022, 14, 3092. [Google Scholar] [CrossRef]
- Tapley, B.D.; Watkins, M.M.; Flechtner, F.; Reigber, C.; Bettadpur, S.; Rodell, M.; Sasgen, I.; Famiglietti, J.S.; Landerer, F.W.; Chambers, D.P.; et al. Contributions of GRACE to understanding climate change. Nat. Clim. Chang. 2019, 9, 358–369. [Google Scholar] [CrossRef] [PubMed]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Abernathy, M.R.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; et al. Observation of Gravitational Waves from a Binary Black Hole Merger. Phys. Rev. Lett. 2016, 116, 061102. [Google Scholar] [CrossRef] [PubMed]
- Abbott, B.P.; Abbott, R.; Abbott, T.D.; Acernese, F.; Ackley, K.; Adams, C.; Adams, T.; Addesso, P.; Adhikari, R.X.; Adya, V.B.; et al. GW170817: Observation of Gravitational Waves from a Binary Neutron Star Inspiral. Phys. Rev. Lett. 2017, 119, 161101. [Google Scholar] [CrossRef] [PubMed]
- Miller, M.C.; Yunes, N. The new frontier of gravitational waves. Nature 2019, 568, 469–476. [Google Scholar] [CrossRef]
- Abich, K.; Abramovici, A.; Amparan, B.; Baatzsch, A.; Okihiro, B.B.; Barr, D.C.; Bize, M.P.; Bogan, C.; Braxmaier, C.; Burke, M.J.; et al. In-Orbit Performance of the GRACE Follow-On Laser Ranging Interferometer. Phys. Rev. Lett. 2019, 123, 031101. [Google Scholar] [CrossRef]
- Velicogna, I.; Mohajerani, Y.; A, G.; Landerer, F.; Mouginot, J.; Noel, B.; Rignot, E.; Sutterley, T.; Broeke, M.; Wessem, M.; et al. Continuity of Ice Sheet Mass Loss in Greenland and Antarctica from the GRACE and GRACE Follow-On Missions. Geophys. Res. Lett. 2020, 47, e2020GL087291. [Google Scholar] [CrossRef]
- Landerer, F.W.; Flechtner, F.M.; Save, H.; Webb, F.H.; Bandikova, T.; Bertiger, W.I.; Bettadpur, S.V.; Byun, S.H.; Dahle, C.; Dobslaw, H.; et al. Extending the Global Mass Change Data Record: GRACE Follow-On Instrument and Science Data Performance. Geophys. Res. Lett. 2020, 47, e2020GL088306. [Google Scholar] [CrossRef]
- Flechtner, F.; Neumayer, K.H.; Dahle, C.; Dobslaw, H.; Fagiolini, E.; Raimondo, J.C.; Güntner, A. What Can be Expected from the GRACE-FO Laser Ranging Interferometer for Earth Science Applications? Surv. Geophys. 2015, 37, 453–470. [Google Scholar] [CrossRef]
- Wegener, H.; Müller, V.; Heinzel, G.; Misfeldt, M. Tilt-to-Length Coupling in the GRACE Follow-On Laser Ranging Interferometer. J. Spacecr. Rocket. 2020, 57, 1362–1372. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Auger, G.; Baird, J.T.; Bassan, M.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Caleno, M.; et al. Sub-Femto-g Free Fall for Space-Based Gravitational Wave Observatories: LISA Pathfinder Results. Phys. Rev. Lett. 2016, 116, 231101. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Castelli, E.; Cavalleri, A.; Cesarini, A.; et al. Sensor Noise in LISA Pathfinder: In-Flight Performance of the Optical Test Mass Readout. Phys. Rev. Lett. 2021, 126, 131103. [Google Scholar] [CrossRef]
- Armano, M.; Audley, H.; Baird, J.; Binetruy, P.; Born, M.; Bortoluzzi, D.; Brandt, N.; Castelli, E.; Cavalleri, A.; Cesarini, A.; et al. Sensor noise in LISA Pathfinder: An extensive in-flight review of the angular and longitudinal interferometric measurement system. Phys. Rev. D 2022, 106, 082001. [Google Scholar] [CrossRef]
- Drever, R.W.P.; Hall, J.L.; Kowalski, F.V.; Hough, J.; Ford, G.M.; Munley, A.J.; Ward, H. Laser phase and frequency stabilization using an optical resonator. Appl. Phys. B Photophys. Laser Chem. 1983, 31, 97–105. [Google Scholar] [CrossRef]
- Webster, S.A.; Oxborrow, M.; Gill, P. Vibration insensitive optical cavity. Phys. Rev. A-At. Mol. Opt. Phys. 2007, 75, 011801. [Google Scholar] [CrossRef]
- Webster, S.A.; Oxborrow, M.; Pugla, S.; Millo, J.; Gill, P. Thermal-noise-limited optical cavity. Phys. Rev. A 2008, 77, 033847. [Google Scholar] [CrossRef]
- Webster, S.; Gill, P. Force-insensitive optical cavity. Opt. Lett. 2011, 36, 3572. [Google Scholar] [CrossRef]
- Arie, A.; Schiller, S.; Gustafson, E.K.; Byer, R.L. Absolute frequency stabilization of diode-laser-pumped Nd:YAG lasers to hyperfine transitions in molecular iodine. Opt. Lett. 1992, 17, 1204. [Google Scholar] [CrossRef]
- Leonhardt, V.; Camp, J.B. Space interferometry application of laser frequency stabilization with molecular iodine. Appl. Opt. 2006, 45, 4142. [Google Scholar] [CrossRef]
- Gerberding, O.; Isleif, K.S.; Mehmet, M.; Danzmann, K.; Heinzel, G. Laser-Frequency Stabilization via a Quasimonolithic Mach-Zehnder Interferometer with Arms of Unequal Length and Balanced dc Readout. Phys. Rev. Appl. 2017, 7, 024027. [Google Scholar] [CrossRef]
- Huarcaya, V.; Álvarez, M.D.; Penkert, D.; Gozzo, S.; Cano, P.M.; Yamamoto, K.; Delgado, J.J.E.; Mehmet, M.; Danzmann, K.; Heinzel, G. 2×10−13 Fractional Laser-Frequency Stability with a 7-cm Unequal-Arm Mach-Zehnder Interferometer. Phys. Rev. Appl. 2023, 20, 024078. [Google Scholar] [CrossRef]
- Isleif, K.S. Laser Interferometry for LISA and Satellite Geodesy Missions; Institutional Repository of Leibniz Universität Hannover: Hannover, Germany, 2018. [Google Scholar] [CrossRef]
- Yang, Y.; Yamamoto, K.; Huarcaya, V.; Vorndamme, C.; Penkert, D.; Fernández Barranco, G.; Schwarze, T.S.; Mehmet, M.; Esteban Delgado, J.J.; Jia, J.; et al. Single-Element Dual-Interferometer for Precision Inertial Sensing. Sensors 2020, 20, 4986. [Google Scholar] [CrossRef] [PubMed]
- Gerberding, O. Deep frequency modulation interferometry. Opt. Express 2015, 23, 14753–14762. [Google Scholar] [CrossRef] [PubMed]
- Heinzel, G.; Cervantes, F.G.; Marín, A.F.G.; Kullmann, J.; Feng, W.; Danzmann, K. Deep phase modulation interferometry. Opt. Express 2010, 18, 19076–19086. [Google Scholar] [CrossRef] [PubMed]
- Dovale-Álvarez, M. Optical Cavities for Optical Atomic Clocks, Atom Interferometry and Gravitational-Wave Detection; Springer International Publishing: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Moku:Lab Instrument. Liquid Instruments. Available online: https://www.liquidinstruments.com (accessed on 4 October 2023).
- SMB100A Instrument. Rohde & Schwarz. Available online: https://www.rohde-schwarz.com (accessed on 4 October 2023).
- Tröbs, M.; Heinzel, G. Improved spectrum estimation from digitized time series on a logarithmic frequency axis. Measurement 2006, 39, 120–129. [Google Scholar] [CrossRef]
- Riley, W.; Howe, D. Handbook of Frequency Stability Analysis; NIST Special Publication-1065; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2008.
- Greenhall, C.A.; Riley, W.J. Uncertainty of stability variances based on finite differences. In Proceedings of the 35th Annual Precise Time and Time Interval Systems and Applications Meeting, San Diego, CA, USA, 2 December 2003. [Google Scholar]
- Watchi, J.; Cooper, S.; Ding, B.; Mow-Lowry, C.M.; Collette, C. Contributed Review: A review of compact interferometers. Rev. Sci. Instrum. 2018, 89, 121501. [Google Scholar] [CrossRef]
- Pisani, M.; Zucco, M. An accelerometer for spaceborne application with interferometric readout. Measurement 2018, 122, 507–512. [Google Scholar] [CrossRef]
- Isleif, K.S.; Heinzel, G.; Mehmet, M.; Gerberding, O. Compact Multifringe Interferometry with Subpicometer Precision. Phys. Rev. Appl. 2019, 12, 034025. [Google Scholar] [CrossRef]
- Yan, H.; Yeh, H.C.; Mao, Q. High precision six-degree-of-freedom interferometer for test mass readout. Class. Quantum Gravity 2022, 39, 075024. [Google Scholar] [CrossRef]
- Zhang, Y.; Guzman, F. Quasi-monolithic heterodyne laser interferometer for inertial sensing. Opt. Lett. 2022, 47, 5120–5123. [Google Scholar] [CrossRef] [PubMed]
- Smetana, J.; Walters, R.; Bauchinger, S.; Ubhi, A.S.; Cooper, S.; Hoyland, D.; Abbott, R.; Baune, C.; Fritchel, P.; Gerberding, O.; et al. Compact Michelson Interferometers with Subpicometer Sensitivity. Phys. Rev. Appl. 2022, 18, 034040. [Google Scholar] [CrossRef]
- Kranzhoff, S.L.; Lehmann, J.; Kirchhoff, R.; Carlassara, M.; Cooper, S.J.; Koch, P.; Leavey, S.; Lück, H.; Mow-Lowry, C.M.; Wöhler, J.; et al. A vertical inertial sensor with interferometric readout. Class. Quantum Gravity 2022, 40, 015007. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Noise at 1 mHz | Noise at 1 Hz | Wavelength | Dimensions | ||
|---|---|---|---|---|---|
| Year | Device | (pm/) | (nm) | (cm) | |
| 2018 | Pisani [34] | 1064 | |||
| 2019 | Isleif [35] | 20 | 1064 | ||
| 2022 | Yan [36] | 4–6 | 1064 | ||
| 2022 | Zhang [37] | 1550 | |||
| 2022 | Smetana [38] | - | 1064 | ||
| 2022 | Kranzhoff [39] | 1 | 1064 | ||
| 2023 | Huarcaya [22] | 0.4 | 0.007 | 1064 | |
| 2023 | SEDI (this work) | 10.2 | 0.12 | 1064 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huarcaya, V.; Dovale Álvarez, M.; Yamamoto, K.; Yang, Y.; Gozzo, S.; Martínez Cano, P.; Mehmet, M.; Esteban Delgado, J.J.; Jia, J.; Heinzel, G. Single-Element Dual-Interferometer for Precision Inertial Sensing: Sub-Picometer Structural Stability and Performance as a Reference for Laser Frequency Stabilization. Sensors 2023, 23, 9758. https://doi.org/10.3390/s23249758
Huarcaya V, Dovale Álvarez M, Yamamoto K, Yang Y, Gozzo S, Martínez Cano P, Mehmet M, Esteban Delgado JJ, Jia J, Heinzel G. Single-Element Dual-Interferometer for Precision Inertial Sensing: Sub-Picometer Structural Stability and Performance as a Reference for Laser Frequency Stabilization. Sensors. 2023; 23(24):9758. https://doi.org/10.3390/s23249758
Chicago/Turabian StyleHuarcaya, Victor, Miguel Dovale Álvarez, Kohei Yamamoto, Yichao Yang, Stefano Gozzo, Pablo Martínez Cano, Moritz Mehmet, Juan José Esteban Delgado, Jianjun Jia, and Gerhard Heinzel. 2023. "Single-Element Dual-Interferometer for Precision Inertial Sensing: Sub-Picometer Structural Stability and Performance as a Reference for Laser Frequency Stabilization" Sensors 23, no. 24: 9758. https://doi.org/10.3390/s23249758
APA StyleHuarcaya, V., Dovale Álvarez, M., Yamamoto, K., Yang, Y., Gozzo, S., Martínez Cano, P., Mehmet, M., Esteban Delgado, J. J., Jia, J., & Heinzel, G. (2023). Single-Element Dual-Interferometer for Precision Inertial Sensing: Sub-Picometer Structural Stability and Performance as a Reference for Laser Frequency Stabilization. Sensors, 23(24), 9758. https://doi.org/10.3390/s23249758