
Location Matters—Can a Smart Golf Club Detect Where the Club Face Hits the Ball?


Abstract
:1. Introduction
2. Materials and Methods
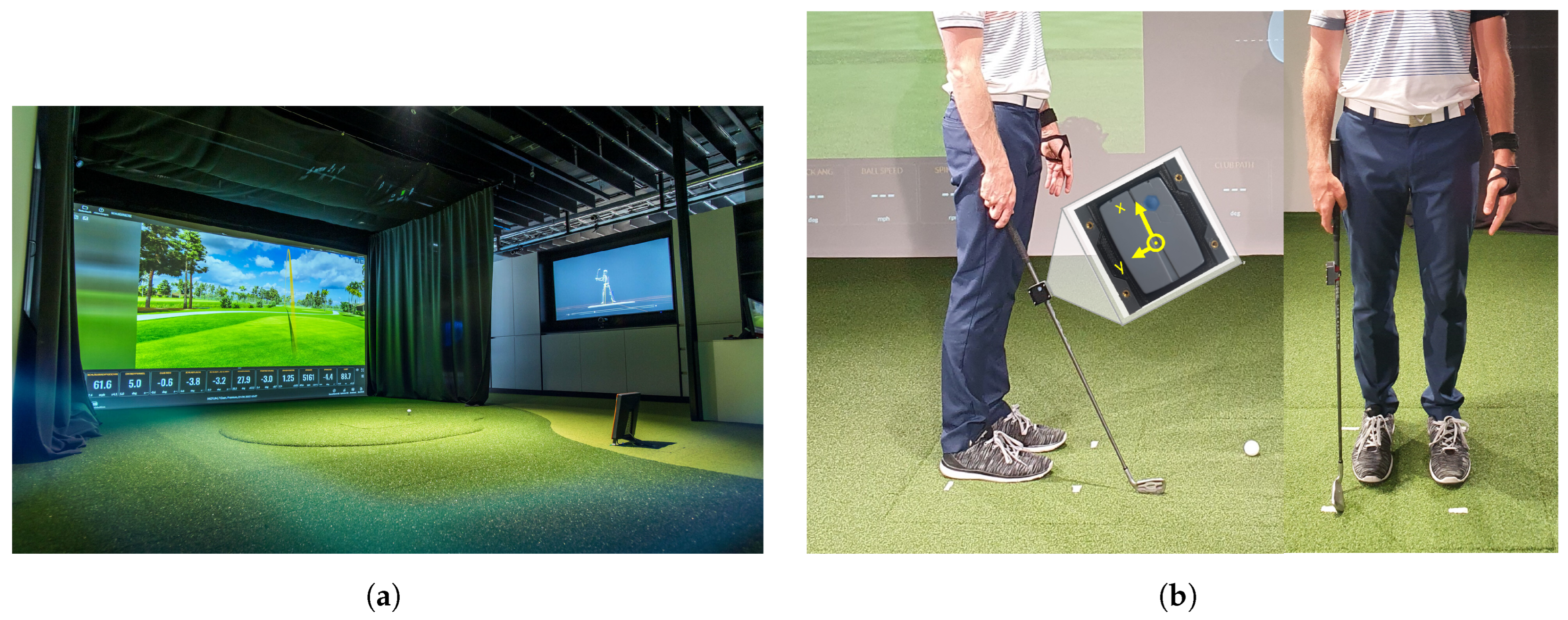
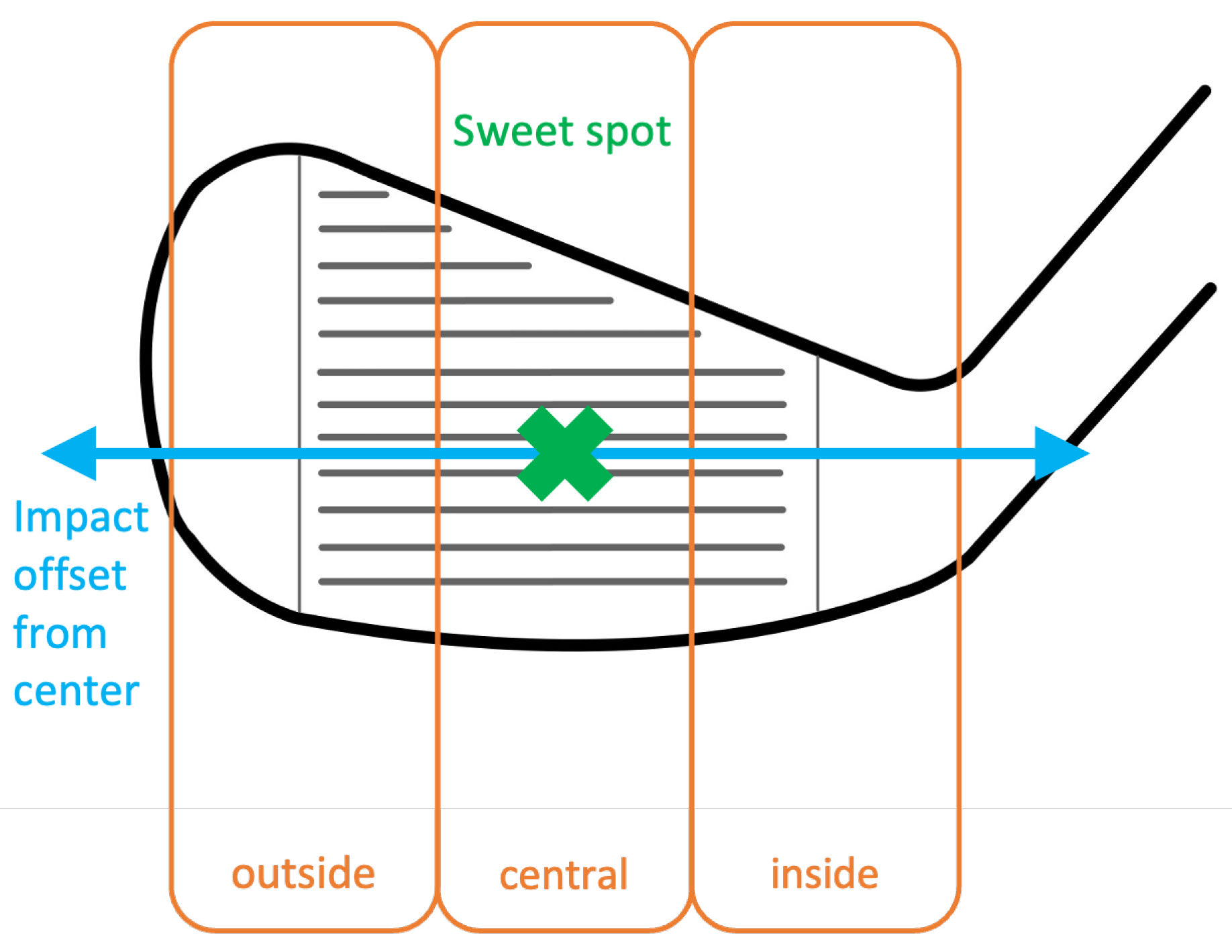
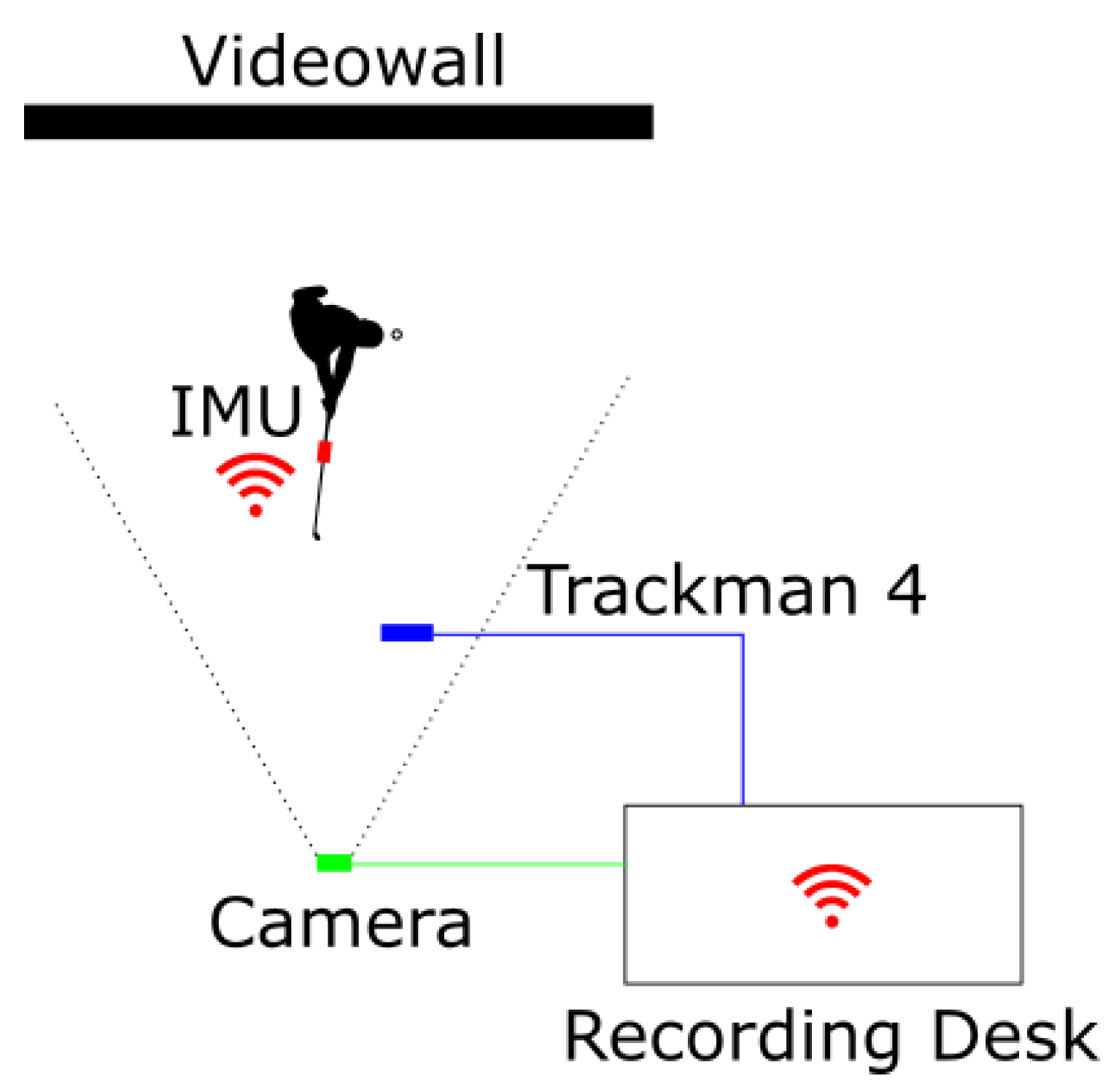
2.1. Experimental Design
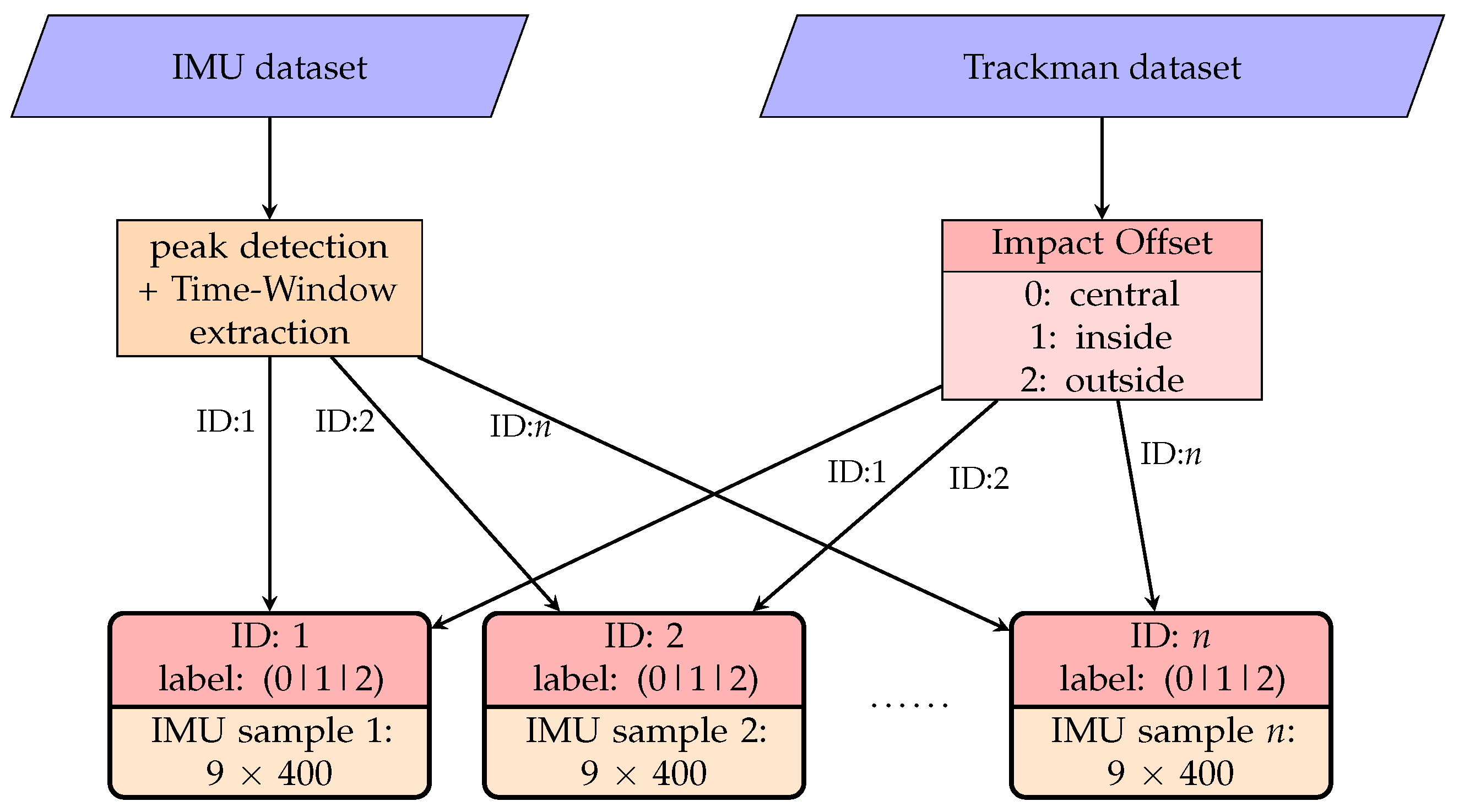
2.2. Data Processing
2.3. Data Augmentation and Splits
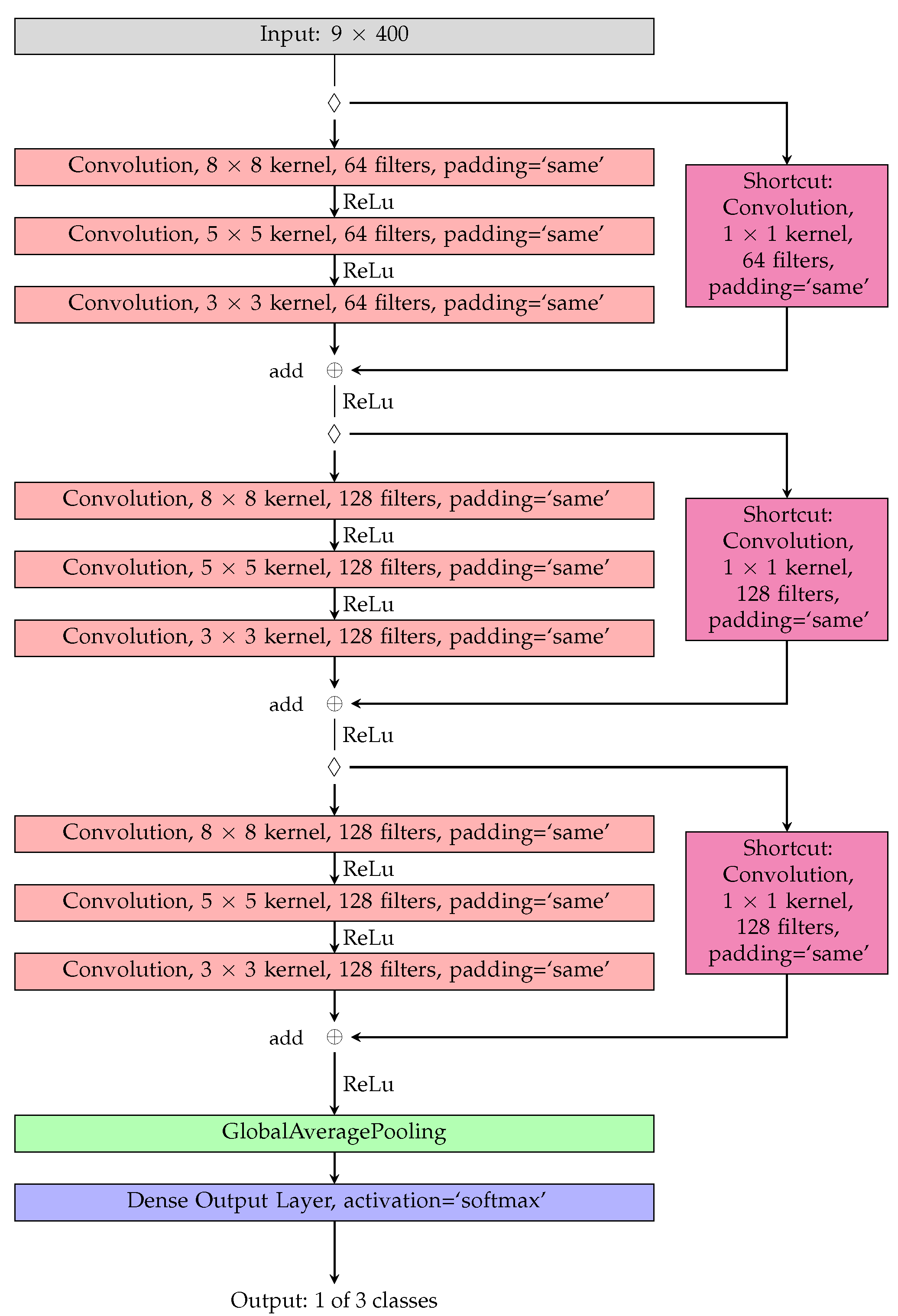
2.4. Network Architecture
2.5. Training of the Neural Network Classifiers
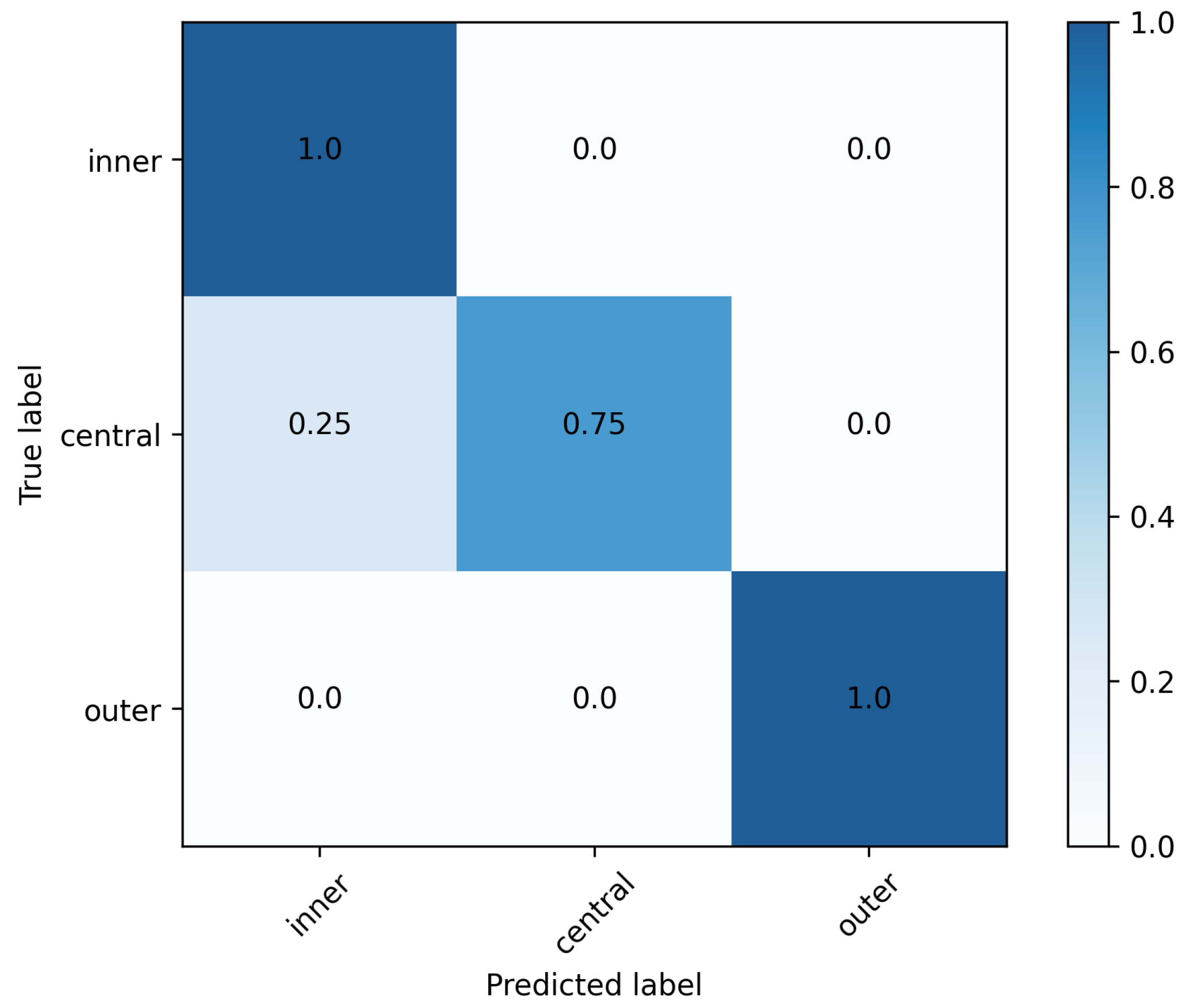
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| MCI | Management Center Innsbruck |
| IMU | inertial measurement unit |
| ICA | independent component analysis |
| etc. | et cetera |
| ADC | analog digital converter |
| e.g., | exempli gratia |
| CNN | convolutional neural network |
| LSTM | long short time memory |
| ReLu | rectified linear unit |
| ML | machine learning |
| FC | fully connected |
| DoF | degree of freedom |
References
- Mendes, J.J.A., Jr.; Vieira, M.E.M.; Pires, M.B.; Stevan, S.L., Jr. Sensor Fusion and Smart Sensor in Sports and Biomedical Applications. Sensors 2016, 16, 1569. [Google Scholar] [CrossRef]
- Perego, P.; Moltani, A.; Andreoni, G. Sport monitoring with smart wearable system. In Proceedings of the pHealth, Porto, Portugal, 26–28 June 2012; pp. 224–228. [Google Scholar]
- Ahmadi, A.; Rowlands, D.; James, D.A. Towards a wearable device for skill assessment and skill acquisition of a tennis player during the first serve. Sport. Technol. 2009, 2, 129–136. [Google Scholar] [CrossRef]
- Coyle, S.; Morris, D.; Lau, K.T.; Diamond, D.; Moyna, N. Textile-Based Wearable Sensors for Assisting Sports Performance. In Proceedings of the 2009 Sixth International Workshop on Wearable and Implantable Body Sensor Networks, Berkeley, CA, USA, 3–5 June 2009; pp. 307–311. [Google Scholar] [CrossRef]
- Tan, H.; Wilson, A.M.; Lowe, J. Measurement of stride parameters using a wearable GPS and inertial measurement unit. J. Biomech. 2008, 41, 1398–1406. [Google Scholar] [CrossRef] [PubMed]
- Jaén-Carrillo, D.; Roche-Seruendo, L.E.; Cartón-Llorente, A.; Ramírez-Campillo, R.; García-Pinillos, F. Mechanical power in endurance running: A scoping review on sensors for power output estimation during running. Sensors 2020, 20, 6482. [Google Scholar] [CrossRef]
- Digi-Sporting Project Consortium (Ed.) Digi-Sporting. A New Step towards Digital Transformation through Sports Science. 2020. Available online: https://www.digi-sporting.eu/standard-manual (accessed on 4 December 2023).
- Luteberget, L.S.; Spencer, M.; Gilgien, M. Validity of the Catapult ClearSky T6 local positioning system for team sports specific drills, in indoor conditions. Front. Physiol. 2018, 9, 115. [Google Scholar] [CrossRef] [PubMed]
- Vleugels, R.; van Herbruggen, B.; Fontaine, J.; de Poorter, E. Ultra-Wideband Indoor Positioning and IMU-Based Activity Recognition for Ice Hockey Analytics. Sensors 2021, 21, 4650. [Google Scholar] [CrossRef]
- Memmert, D.; Lemmink, K.A.P.M.; Sampaio, J. Current Approaches to Tactical Performance Analyses in Soccer Using Position Data. Sport. Med. 2017, 47, 1–10. [Google Scholar] [CrossRef]
- Park, J.L.; Logan, O. High-speed video analysis of arrow behaviour during the power stroke of a recurve archery bow. Proc. Inst. Mech. Eng. Part P J. Sport. Eng. Technol. 2012, 227, 128–136. [Google Scholar] [CrossRef]
- Jackson, B.M.; Polglaze, T.; Dawson, B.; King, T.; Peeling, P. Comparing Global Positioning System and Global Navigation Satellite System Measures of Team-Sport Movements. Int. J. Sport. Physiol. Perform. 2018, 13, 1005–1010. [Google Scholar] [CrossRef]
- Doljin, B.; Fuss, F.K. Development of a Smart Cricket Ball for Advanced Performance Analysis of Bowling. Procedia Technol. 2015, 20, 133–137. [Google Scholar] [CrossRef]
- Fuss, F.K.; Doljin, B.; Ferdinands, R.E.D. Bowling Performance Assessed with a Smart Cricket Ball: A Novel Way of Profiling Bowlers. Proceedings 2020, 49, 141. [Google Scholar] [CrossRef]
- McGrath, J.; Neville, J.; Stewart, T.; Clinning, H.; Cronin, J. Can an inertial measurement unit (IMU) in combination with machine learning measure fast bowling speed and perceived intensity in cricket? J. Sport. Sci. 2021, 39, 1402–1409. [Google Scholar] [CrossRef]
- Okholm Kryger, K.; Mitchell, S.; Forrester, S. Assessment of the accuracy of different systems for measuring football velocity and spin rate in the field. Proc. Inst. Mech. Eng. Part P J. Sport. Eng. Technol. 2019, 233, 324–330. [Google Scholar] [CrossRef]
- Stone, T.; Stone, N.; Roy, N.; Melton, W.; Jackson, J.B.; Nelakuditi, S. On Smart Soccer Ball as a Head Impact Sensor. IEEE Trans. Instrum. Meas. 2019, 68, 2979–2987. [Google Scholar] [CrossRef]
- Stoeve, M.; Schuldhaus, D.; Gamp, A.; Zwick, C.; Eskofier, B.M. From the Laboratory to the Field: IMU-Based Shot and Pass Detection in Football Training and Game Scenarios Using Deep Learning. Sensors 2021, 21, 3071. [Google Scholar] [CrossRef] [PubMed]
- Yu, C.; Huang, T.Y.; Ma, H.P. Motion Analysis of Football Kick Based on an IMU Sensor. Sensors 2022, 22, 6244. [Google Scholar] [CrossRef] [PubMed]
- Coach Labs, GEN i1. Available online: https://www.digitaltrends.com/outdoors/gen-i1-smart-golf-ball, (accessed on 4 December 2023).
- Medium, T.S. Smart Tennis Sensors—IN OR OUT? Available online: https://teamscotland.medium.com/smart-tennis-sensors-in-or-out-be110259f028 (accessed on 4 December 2023).
- Ganser, A.; Hollaus, B.; Stabinger, S. Classification of Tennis Shots with a Neural Network Approach. Sensors 2021, 21, 5703. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Yan, W.; Oates, T. Time Series Classification from Scratch with Deep Neural Networks: A Strong Baseline. arXiv 2016, arXiv:1611.06455v4. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. arXiv 2015, arXiv:1512.03385. [Google Scholar]
- Cust, E.E.; Sweeting, A.J.; Ball, K.; Robertson, S. Machine and deep learning for sport-specific movement recognition: A systematic review of model development and performance. J. Sport. Sci. 2019, 37, 568–600. [Google Scholar] [CrossRef]
- Xiang, L.; Wang, A.; Gu, Y.; Zhao, L.; Shim, V.; Fernandez, J. Recent machine learning progress in lower limb running biomechanics with wearable technology: A systematic review. Front. Neurorobot. 2022, 16, 913052. [Google Scholar] [CrossRef] [PubMed]
- Stitt, D.; Draper, N.; Alexander, K.; Kabaliuk, N. Laboratory validation of instrumented mouthguard for use in sport. Sensors 2021, 21, 6028. [Google Scholar] [CrossRef] [PubMed]
- Cizmic, D.; Hoelbling, D.; Baranyi, R.; Breiteneder, R.; Grechenig, T. Smart Boxing Glove “RD α”: IMU Combined with Force Sensor for Highly Accurate Technique and Target Recognition Using Machine Learning. Appl. Sci. 2023, 13, 9073. [Google Scholar] [CrossRef]
- Kim, M.; Park, S. Golf Swing Segmentation from a Single IMU Using Machine Learning. Sensors 2020, 20, 4466. [Google Scholar] [CrossRef]
- Huang, Y.C.; Chen, T.L.; Chiu, B.C.; Yi, C.W.; Lin, C.W.; Yeh, Y.J.; Kuo, L.C. Calculate golf swing trajectories from imu sensing data. In Proceedings of the 2012 41st International Conference on Parallel Processing Workshops, Pittsburgh, PA, USA, 10–13 September 2012; pp. 505–513. [Google Scholar]
- Cole, M.H.; Grimshaw, P.N. The biomechanics of the modern golf swing: Implications for lower back injuries. Sport. Med. 2016, 46, 339–351. [Google Scholar] [CrossRef]
- Chu, Y.; Sell, T.C.; Lephart, S.M. The relationship between biomechanical variables and driving performance during the golf swing. J. Sport. Sci. 2010, 28, 1251–1259. [Google Scholar] [CrossRef]
- Zhou, J.Y.; Richards, A.; Schadl, K.; Ladd, A.; Rose, J. The swing performance Index: Developing a single-score index of golf swing rotational biomechanics quantified with 3D kinematics. Front. Sport. Act. Living 2022, 4, 480. [Google Scholar] [CrossRef]
- Tucker, C.B.; Anderson, R.; Kenny, I.C. Is outcome related to movement variability in golf? Sport. Biomech. 2013, 12, 343–354. [Google Scholar] [CrossRef]
- Ball, K.; Best, R. Different centre of pressure patterns within the golf stroke I: Cluster analysis. J. Sport. Sci. 2007, 25, 757–770. [Google Scholar] [CrossRef]
- Betzler, N.F.; Monk, S.A.; Wallace, E.S.; Otto, S.R. The relationships between driver clubhead presentation characteristics, ball launch conditions and golf shot outcomes. Proc. Inst. Mech. Eng. Part P J. Sport. Eng. Technol. 2014, 228, 242–249. [Google Scholar] [CrossRef]
- Iwatsubo, T.; Kawamura, S.; Miyamoto, K.; Yamaguchi, T. Numerical analysis of golf club head and ball at various impact points. Sport. Eng. 2000, 3, 195–204. [Google Scholar] [CrossRef]
- TrackMan. Technical Specifications of TrackMan 4. Available online: https://www.trackman.com/golf/launch-monitors/tech-specs (accessed on 4 December 2023).
- Wang, J.J.; Yang, P.F.; Ho, W.H.; Shiang, T.Y. Determine an effective golf swing by swing speed and impact precision tests. J. Sport Health Sci. 2015, 4, 244–249. [Google Scholar] [CrossRef]
- Noraxon USA. Noraxon Ultium Motion Specifications; Noraxon USA: Scottsdale, AZ, USA; Available online: https://www.velamed.com/wp-content/uploads/Noraxon_UltiumMotion_dt.pdf (accessed on 4 December 2023).
- Analytics, A. Tsaug—A Python Package for Time Series Augmentations. Available online: https://tsaug.readthedocs.io/en/stable/ (accessed on 4 December 2023).
- Bisong, E.; Bisong, E. Google Colaboratory. In Building Machine Learning and Deep Learning Models on Google Cloud Platform: A Comprehensive Guide for Beginners; Apress: Berkeley, CA, USA, 2019; pp. 59–64. [Google Scholar] [CrossRef]
- Refaeilzadeh, P.; Tang, L.; Liu, H. Cross-Validation. In Encyclopedia of Database Systems; Liu, L., Özsu, M.T., Eds.; Springer: Boston, MA, USA, 2009; pp. 532–538. [Google Scholar] [CrossRef]
- Kingma, D.P.; Ba, J. Adam: A Method for Stochastic Optimization. CoRR. 2014, abs/1412.6980. Available online: https://api.semanticscholar.org/CorpusID:6628106 (accessed on 4 December 2023).
- Finlay, C.C.; Maus, S.; Beggan, C.; Bondar, T.; Chambodut, A.; Chernova, T.; Chulliat, A.; Golovkov, V.; Hamilton, B.; Hamoudi, M.; et al. International geomagnetic reference field: The eleventh generation. Geophys. J. Int. 2010, 183, 1216–1230. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Measurement | Measurement Ranges | Maximum Measurement Output in Hz |
|---|---|---|
| Acceleration | ±200 g | 400 |
| Angular velocity | ±7000 deg/s | 400 |
| Magnetic field | ±16 Gauss | 100 |
| Configuration | Accelerometer | Gyroscope | Magnetometer | Median Accuracy |
|---|---|---|---|---|
| 1 | ✗ | ✗ | ✗ | 87.5% |
| 2 | ✗ | 84.4% | ||
| 3 | ✗ | 81.2% | ||
| 4 | ✗ | 28.1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hollaus, B.; Heyer, Y.; Steiner, J.; Strutzenberger, G. Location Matters—Can a Smart Golf Club Detect Where the Club Face Hits the Ball? Sensors 2023, 23, 9783. https://doi.org/10.3390/s23249783
Hollaus B, Heyer Y, Steiner J, Strutzenberger G. Location Matters—Can a Smart Golf Club Detect Where the Club Face Hits the Ball? Sensors. 2023; 23(24):9783. https://doi.org/10.3390/s23249783
Chicago/Turabian StyleHollaus, Bernhard, Yannic Heyer, Johannes Steiner, and Gerda Strutzenberger. 2023. "Location Matters—Can a Smart Golf Club Detect Where the Club Face Hits the Ball?" Sensors 23, no. 24: 9783. https://doi.org/10.3390/s23249783