

Guided Acoustic Waves in Polymer Rods with Varying Immersion Depth in Liquid



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Acoustic Wave Propagation in Polyethylene Rods
2.2. Signal Excitation
- inner diameter
- thickness
- backing thickness
2.3. Experimental Setup
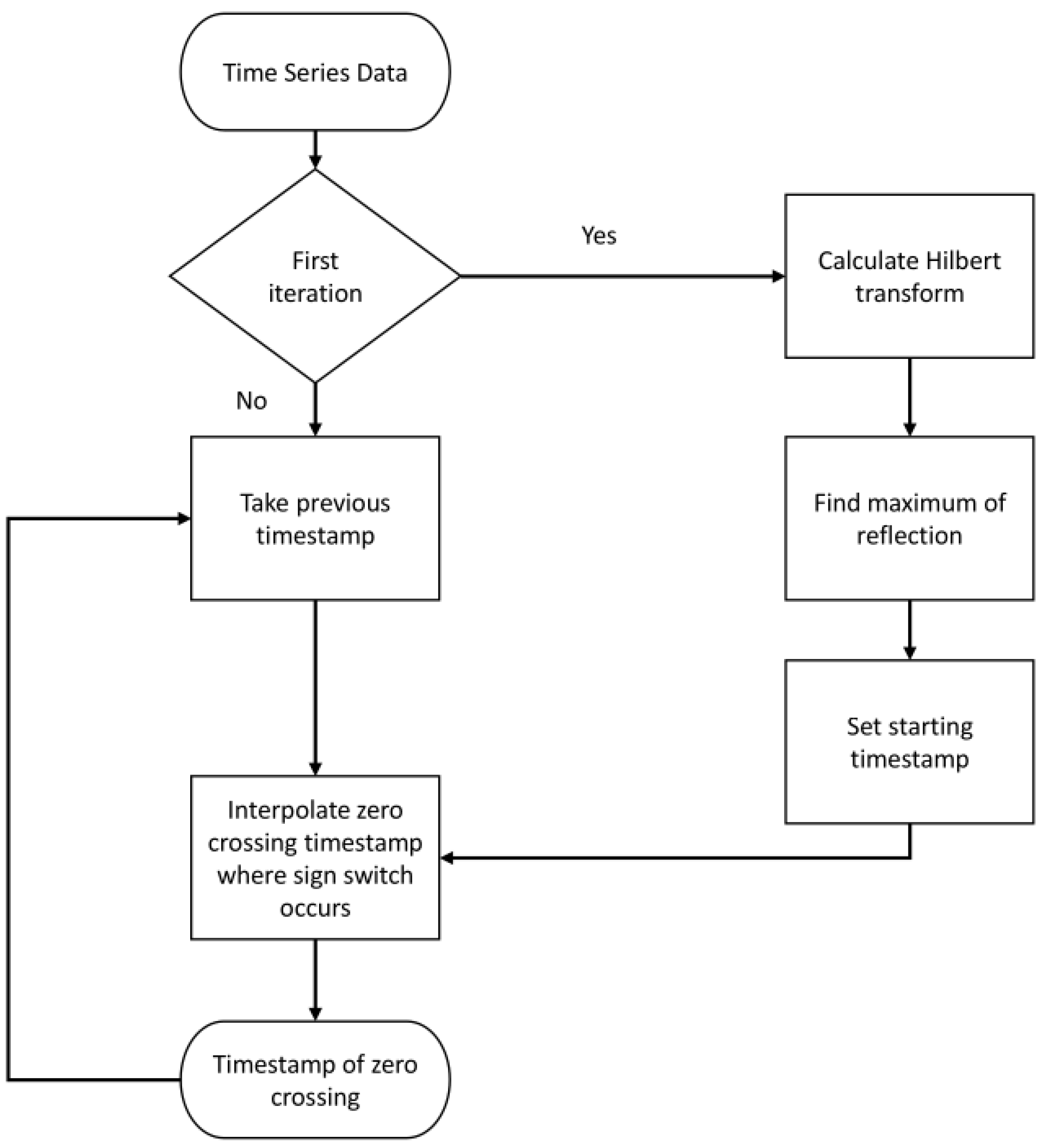
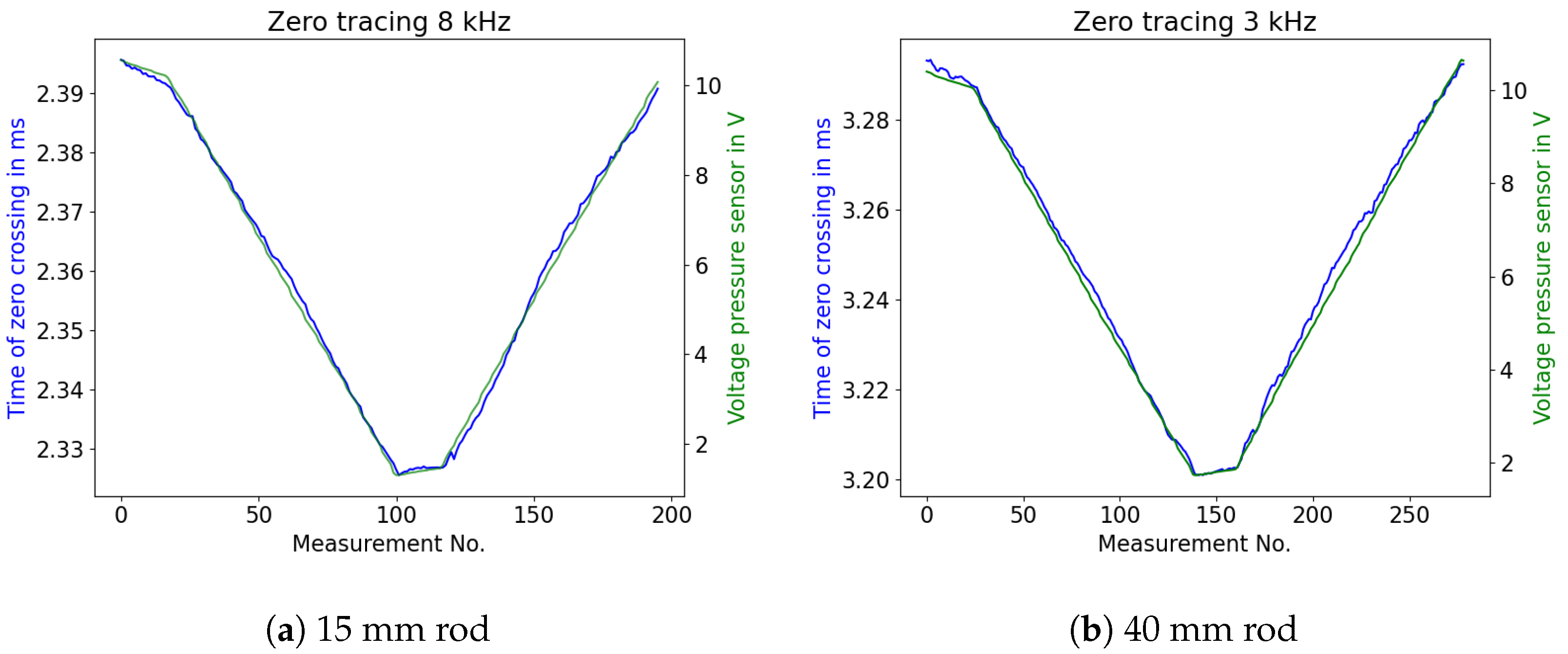
2.4. Zero Tracing
3. Results
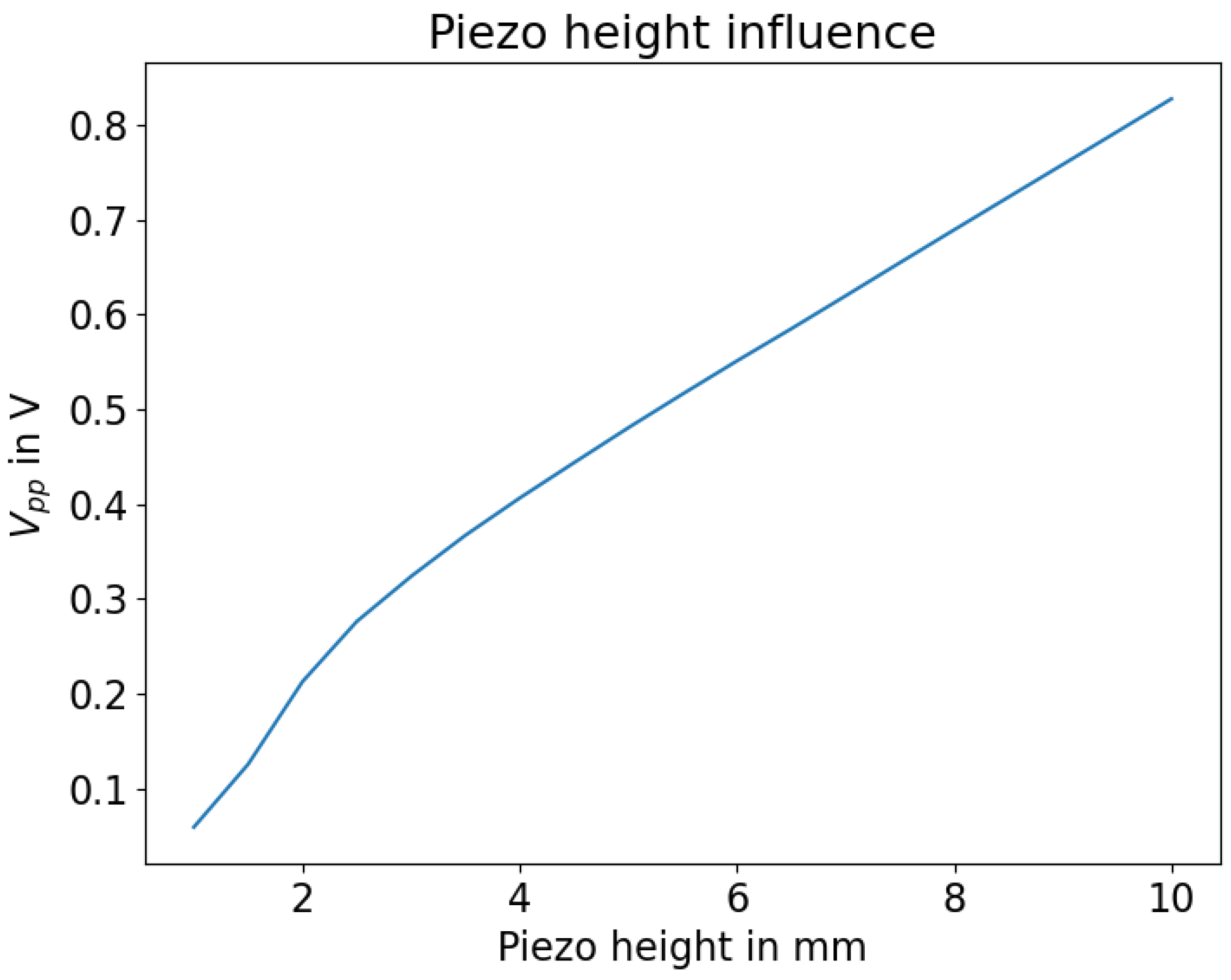
3.1. Piezo Dimensions
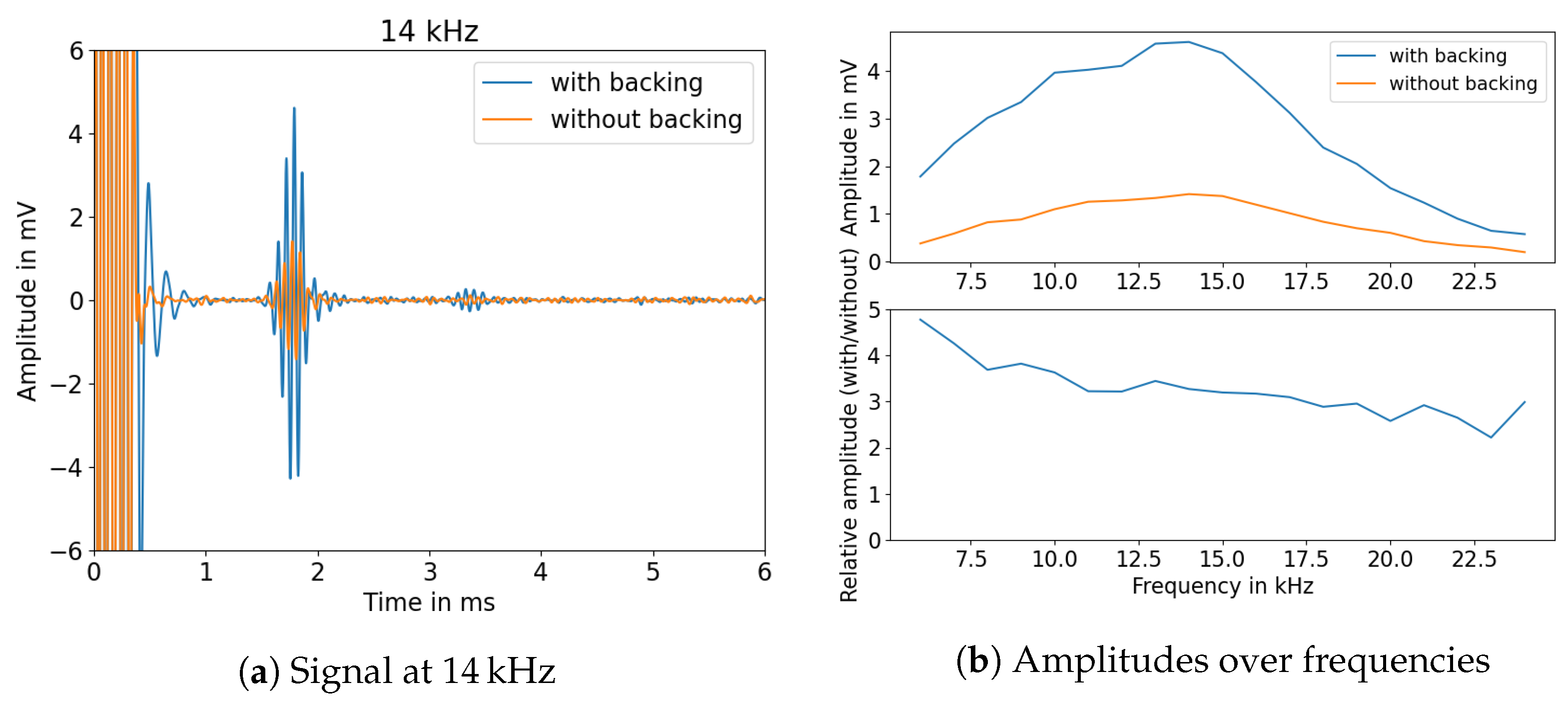
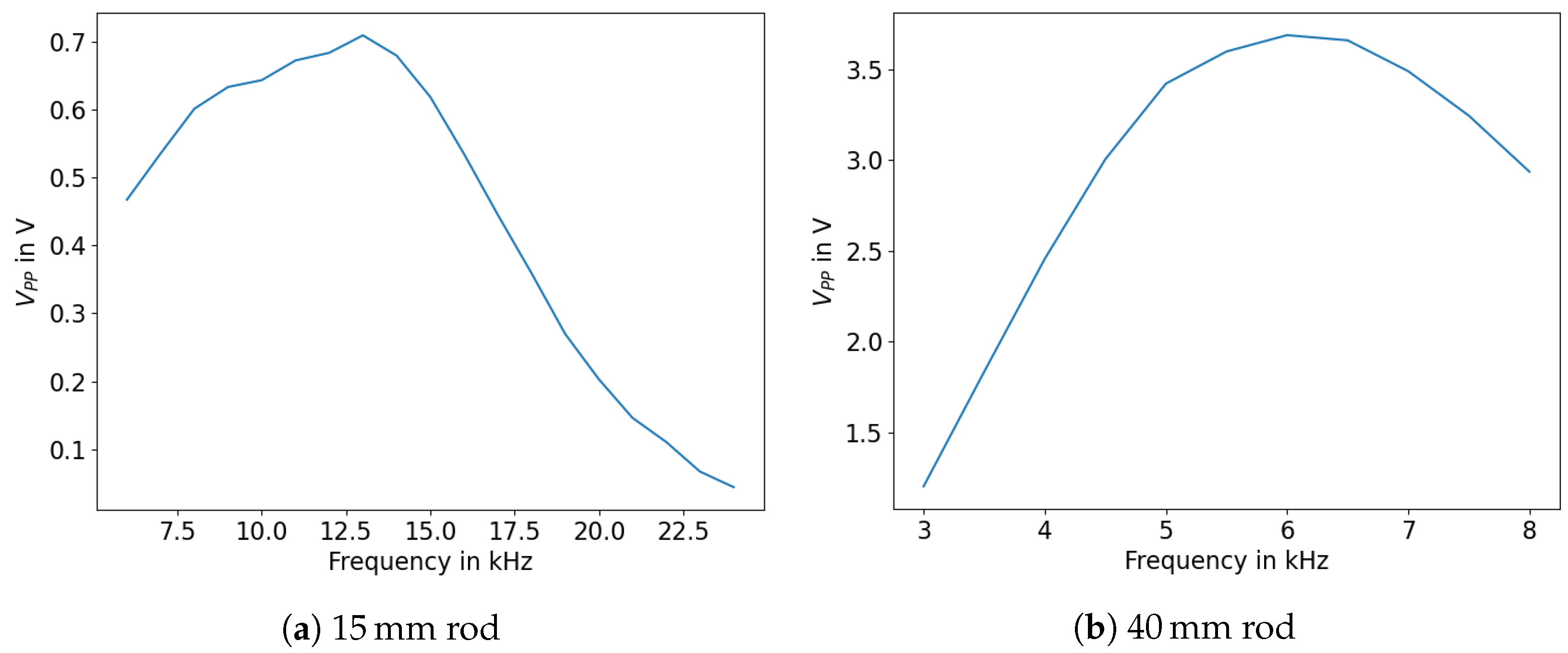
3.2. Waveforms
3.3. Zero Tracing
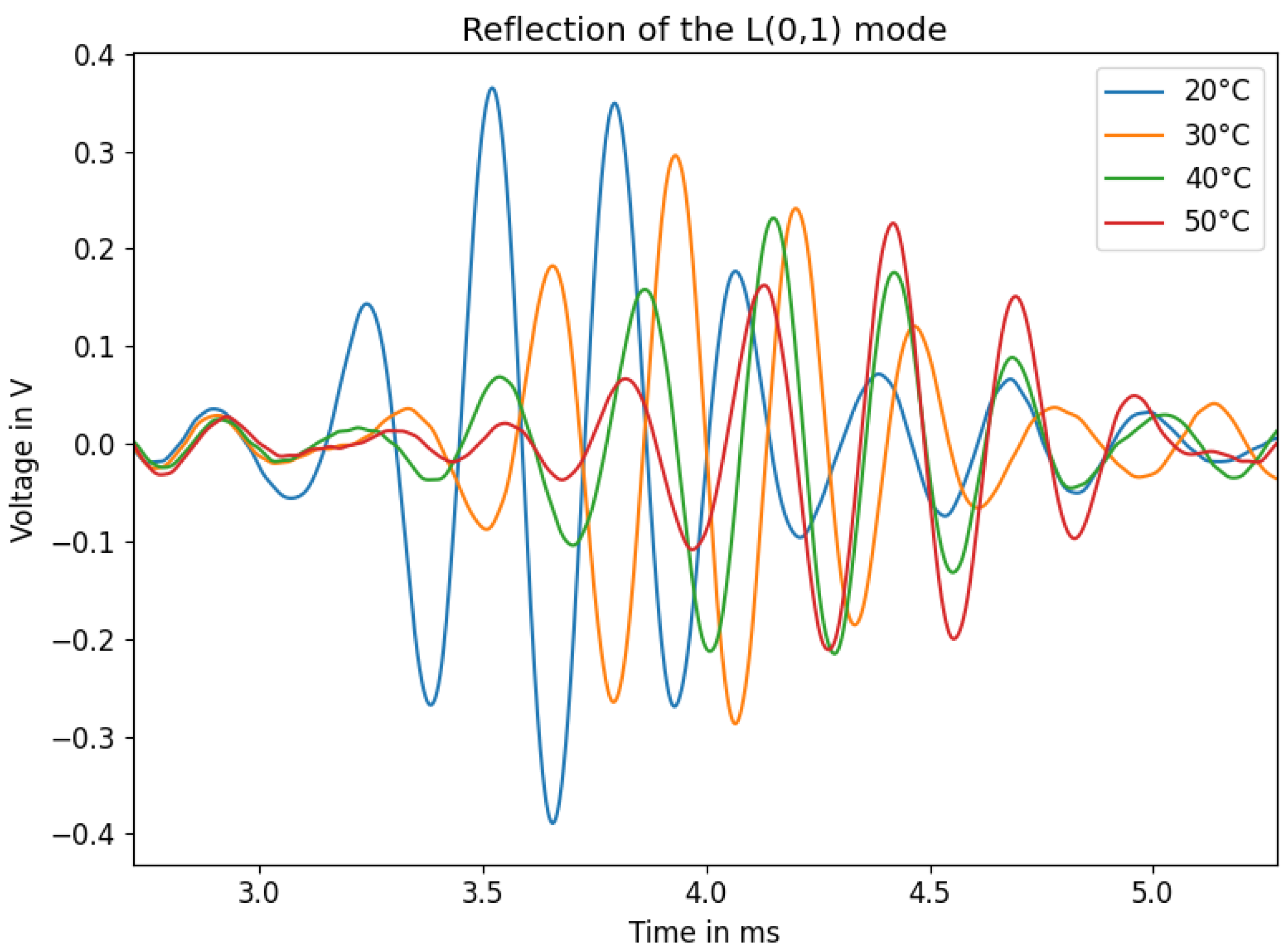
3.4. Temperature Dependency
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| HD-PE | High Density Polyethylene |
References
- Subhash, N.N.; Krishnan, B. Fluid level sensing using ultrasonic waveguides. Insight 2014, 56, 607–612. [Google Scholar] [CrossRef]
- Dhayalan, R.; Saravanan, S.; Manivannan, S.; Purna Chandra Rao, B. Developement of ultrasonic waveguide sensor for liquid level measurement in loop system. Electron. Lett. 2020, 56, 1120–1122. [Google Scholar] [CrossRef]
- Royer, D.; Levin, L.; Legras, O. A Liquid Level Sensor Using the Absorption of Guided Acoustic Waves. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 1993, 40, 418–421. [Google Scholar] [CrossRef] [PubMed]
- Shah, J.; El-Hawwat, S.; Wang, H. Guided Wave Ultrasonic Testing for Crack Detection in Polyethylene Pipes: Laboratory Experiments and Numerical Modeling. Sensors 2023, 23, 5131. [Google Scholar] [CrossRef] [PubMed]
- Sinha, M.; Buckley, D.J. Acoustic Properties of Polymers. In Physical Properties of Polymers Handbook; Springer: New York, NY, USA, 2007; pp. 1021–1031. [Google Scholar]
- Ozaki, R.; Kadowaki, K. Analysis of Attenuation and Dispersion of Acoustic Waves in Low-Density Polyethylene. IEEE Trans. Dielectr. Electr. Insul. 2020, 27, 2007–2013. [Google Scholar] [CrossRef]
- Qi, G.; Li, Y.; Ding, N. Measurement of Acoustic Basic Parameters of Polyethylene Pipe. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Melbourne, Australia, 12–13 October 2019. [Google Scholar]
- Pylaev, A.E.; Kostikova, E.A.; Yurkov, A.L. Velocity and Attenuation of Acoustic Waves in Polymers and Polymer Composites. Polym. Sci. Ser. D 2018, 11, 272–276. [Google Scholar] [CrossRef]
- Mazeika, L.; Sliteris, R.; Vladisauskas, A. Measurement of velocity and attenuation for ultrasonic longitudinal waves in the polyethylene samples. Ultragarsas J. 2011, 16, 12–15. [Google Scholar]
- Jordan, J.L.; Rowl, R.L.; Greenhall, J.; Moss, E.K.; Huber, R.C.; Willis, E.C.; Hrubiak, R.; Kenney-Benson, C.; Bartram, B.; Sturtevant, B.T. Elastic properties of polyethylene from high pressure sound speed measurements. Polymer 2021, 212, 123–164. [Google Scholar] [CrossRef]
- Egerton, J.S.; Lowe, M.J.S.; Huthwaite, P.; Halai, H.V. Ultrasonic attenuation and phase velocity of high-density polyethylene pipe material. J. Acoust. Soc. Am. 2017, 141, 1535–1545. [Google Scholar] [CrossRef]
- Rautenberg, J.; Bause, F.; Henning, B. Utilizing guided acoustic waves to measure dispersive material properties of polymers. In Proceedings of the SENSOR 2015, Nürnberg, Germany, 19–21 May 2015. [Google Scholar]
- Kwun, H.; Bartels, K.A.; Dynes, C. Dispersion of longitudinal waves propagating in liquid-filled cylindrical shells. J. Acoust. Soc. Am. 1999, 105, 2601–2611. [Google Scholar] [CrossRef]
- Wilcox, P.D. A rapid signal processing technique to remove the effect of dispersion from guided wave signals. IEEE Trans. Ultrason. Ferroelectr. Freq. Control 2003, 50, 419–427. [Google Scholar] [CrossRef] [PubMed]
- Gazis, D.C. Three-Dimensional Investigation of the Propagation of Waves in Hollow Circular Cylinders. I. Analytical Foundation. J. Acoust. Soc. Am. 1959, 31, 568–573. [Google Scholar] [CrossRef]
- Gazis, D.C. Three-Dimensional Investigation of the Propagation of Waves in Hollow Circular Cylinders. II. Numerical Results. J. Acoust. Soc. Am. 1959, 31, 573–578. [Google Scholar] [CrossRef]
- Silk, M.G.; Bainton, K.F. The propagation in metal tubing of ultrasonic wave modes equivalent to Lamb waves. Ultrasonics 1979, 17, 11–19. [Google Scholar] [CrossRef]
- The Dispersion Calculator: An Open Source Software for Calculating Dispersion Curves and Mode Shapes of Guided Waves. Available online: https://www.dlr.de/zlp/en/desktopdefault.aspx/tabid-14332/24874_read-61142/ (accessed on 24 August 2023).
- Pavlakovic, B.; Lowe, M.; Alleyne, D.; Cawley, P. Disperse: A General Purpose Program for Creating Dispersion Curves. In Review of Progress in Quantitative Nondestructive Evaluation: Volume 16; Springer: Boston, MA, USA, 1997; pp. 185–192. [Google Scholar]
- Wilcox, P. Long Range Lamb Wave Inspection: The Effect of Dispersion and Modal Selectivity. In Review of Progress in Quantitative Nondestructive Evaluation: Volume 18A–18B; Springer US: Boston, MA, USA, 1999; pp. 151–158. [Google Scholar]
- Lowe, M.J.S. WAVE PROPAGATION|Guided Waves in Structures. In Encyclopedia of Vibration; Elsevier: Amsterdam, The Netherlands, 2001. [Google Scholar]
- Duquennnoy, M.; Ouaftouh, M.; Qian, M.L.; Jenot, F.; Ourak, M. Ultrasonic characterization of residual stresses in steel rods using a laser line source and piezoelectric transducers. NDT E Int. 2001, 34, 355–362. [Google Scholar] [CrossRef]
- Comsol Multiphysics: Simulate Real-World Designs, Devices, and Processes with Multiphysics Software from COMSOL. Available online: www.comsol.com (accessed on 24 August 2023).
- Courant, R.; Friedrichs, K.; Lewy, H. On the Partial Difference Equations of Mathematical Physics. IBM J. Res. Dev. 1967, 11, 215–234. [Google Scholar] [CrossRef]
- Moreno, E.; Pereira, W.; von Kruger, M.A.; Leija, L.; Ramos, A. FEM modeling and simulation of broadband ultrasonic transducers with randomized inhomogeneous backing material. arXiv 2022, arXiv:2203.08785. [Google Scholar]
- Kossoff, G. The Effects of Backing and Matching on the Performance of Piezoelectric Ceramic Transducers. IEEE Trans. Sonics Ultrason. 1966, 13, 20–30. [Google Scholar] [CrossRef]
- Subki, M.S.H.M.; Ahmad, K.A.; Osman, M.K.; Boudville, R.; Yahya, S.Z.; Rahman, M.F.A.; Hussain, Z. Characterization of Backing Layer Piezoelectric Ultrasonic Transducers for Underwater Communication. In Proceedings of the IEEE International Conference on Control System, Computing and Engineering, Penang, Malaysia, 27–28 August 2021. [Google Scholar]
- Benatar, A.; Rittel, D.; Yarin, A.L. A Theoretical and experimental analysis of longitudinal wave propagation in cylindrical viscoelastic rods. J. Mech. Phys. Solids 2003, 51, 1413–1431. [Google Scholar] [CrossRef]
- Nomura, R.; Yoneyama, K.; Ogasawara, F.; Ueno, M.; Okuda, Y.; Yamanaka, A. Temperature Dependence of Sound Velocity in High-Strength Fiber-Reinforced Plastics. Jpn. J. Appl. Phys. 2003, 42, 5205. [Google Scholar] [CrossRef]
- Wada, Y.; Yamamoto, K. Temperature Dependence of Velocity and Attenuation of Ultrasonic Waves in High Polymers. J. Phys. Soc. Jpn. 1956, 11, 887–892. [Google Scholar] [CrossRef]
- Merah, N.; Saghir, F.; Khan, Z.; Bazoune, A. Effect of temperature on tensile properties of HDPE pipe material. Plast. Rubber Compos. 2006, 35, 226–230. [Google Scholar] [CrossRef]
- Landskron, J.; Dötzer, F.; Benkert, A.; Mayle, M.; Drese, K.S. Acoustic Limescale Layer and Temperature Measurement in Ultrasonic Flow Meters. Sensors 2022, 22, 6648. [Google Scholar] [CrossRef]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lutter, K.; Backer, A.; Drese, K.S. Guided Acoustic Waves in Polymer Rods with Varying Immersion Depth in Liquid. Sensors 2023, 23, 9892. https://doi.org/10.3390/s23249892
Lutter K, Backer A, Drese KS. Guided Acoustic Waves in Polymer Rods with Varying Immersion Depth in Liquid. Sensors. 2023; 23(24):9892. https://doi.org/10.3390/s23249892
Chicago/Turabian StyleLutter, Klaus, Alexander Backer, and Klaus Stefan Drese. 2023. "Guided Acoustic Waves in Polymer Rods with Varying Immersion Depth in Liquid" Sensors 23, no. 24: 9892. https://doi.org/10.3390/s23249892
APA StyleLutter, K., Backer, A., & Drese, K. S. (2023). Guided Acoustic Waves in Polymer Rods with Varying Immersion Depth in Liquid. Sensors, 23(24), 9892. https://doi.org/10.3390/s23249892