Abstract
This paper studies the tactical decision-making model of short track speed skating based on deep reinforcement learning, so as to improve the competitive performance of corresponding short track speed skaters. Short track speed skating, a traditional discipline in the Winter Olympics since its establishment in 1988, has consistently garnered attention. As artificial intelligence continues to advance, the utilization of deep learning methods to enhance athletes’ tactical decision-making capabilities has become increasingly prevalent. Traditional tactical decision techniques often rely on the experience and knowledge of coaches and video analysis methods that require a lot of time and effort. Consequently, this study proposes a scientific simulation environment for short track speed skating, that accurately simulates the physical attributes of the venue, the physiological fitness of the athletes, and the rules of the competition. The Double Deep Q-Network (DDQN) model is enhanced and utilized, with improvements to the reward function and the distinct description of four tactics. This enables agents to learn optimal tactical decisions in various competitive states with a simulation environment. Experimental results demonstrate that this approach effectively enhances the competition performance and physiological fitness allocation of short track speed skaters.
1. Introduction
Short track speed skating has been a traditional competition of the Winter Olympics since its inception in 1988. With the continuous improvement of intelligence, it is more important to use advanced technology to improve the competitive level of short track speed skaters. The traditional way to improve the performance of short track speed skaters is to analyze and guide athletes at the level of physiology and mechanics of human motion. Felser et al. [1] study maximum voluntary contraction (MVC) strength of the leg muscles and time of 17 young short track speed skaters and finally concludes that stabilizing ankle joint and knee is the main factor to ensure the strength quality. Deguire et al. [2] propose that hypoxic repetitive sprint training can improve repetitive sprint ability and high-intensity performance for national short track speed skaters. Noorbergen et al. [3] study the data of short track speed skaters at 500 m and 1000 m in different seasons in order to provide tactical ideas at the start of the race and each lap. Hext et al. [4] provide a new analysis perspective for short track speed skating by serialization analysis tactical positioning. Knobbe et al. [5] model 15 years of records of elite speed skating team LottoNL-Jumbo in order to obtain potential sources of knowledge and thereby improve training earnings. The above articles prove that the integration of data analysis methods into short track speed skating can effectively improve the performance of athletes.
Traditional tactical decision-making methods are often completed by manual guidance of coaches on training and competition data [6,7,8,9]. Through repeated analysis of the competition video and data of the athletes, the coaches make tactical plans for the athletes based on their own experience, which increases the workload of the coaches. There are few related works that combine deep learning with tactical decision-making in short-track speed skating. Changpeng et al. [10], respectively, analyze and compares the decision-making ability of short track speed skating agent based on the BP neural network and decision tree. Although the result shows that the agent has improved the ability to complete the race, the output of the model is excessively dependent on the manually operated agent trajectory data and the fuzzy interpretation of the curve section causes the agent to repeat the same actions subject to other constraints. Yang et al. [11] use Double Deep Q-network (DDQN) [12] to learn the short track speed skating trajectory of the agent in the simulation environment to improve its tactical decision-making ability. This method guides the agent to learn the tactics with the highest cumulative reward by setting a reward function, so as to make tactical decision planning for the agent in different competition states. However, the simulation environment designed in that paper lacks many physical restrictions, and the complex reward function leads to excessive computation and slow convergence time in the learning process.
Therefore, in order to solve the above problems and further improve the decision-making efficiency of agents, we propose a short track speed skating tactical decision-making model based on deep reinforcement learning. Firstly, we build a simulation environment for the speed skating competition venue, so as to accurately simulate the physical properties of the skating venue, the multiple types of physiological data for athletes and the rules of the short track speed skating competition. Secondly, in order to fully leverage the strengths of reinforcement learning in addressing decision-making problems, we propose the improved DDQN tactical decision model. The strategies explored based on this approach could allow the agent to take the appropriate tactical actions at each step to maximize the cumulative reward and to achieve the effect of improving the performance of the athletes [13]. The main contributions of this work can be summarized as follows:
- We propose a tactical decision model based on DDQN and improve a more scientifically rigorous reward function. Therefore, agents can more efficiently explore and learn tactical decision-making behaviors in different competitive states in the simulation environment.
- We model a real short track speed skating competition, which effectively simulates the rules of a 500-meter short track speed skating event, the physiological data of the athletes, and the information about the competition venue.
- We use the competition data from 16 groups of real athletes for training and testing. Our approach can effectively improve tactical decision-making capabilities. Experimental results demonstrate the effectiveness of our proposed method.
2. Related Work
With the popularity of recommendation algorithms, the use of deep reinforcement learning (DRL) has become more and more widespread. DRL has demonstrated great potential in addressing highly complex and challenging control and decision-making problems [14,15,16]. DRL can be divided into model-free approaches and model-based approaches. Since the states collected from the short-track speed skating simulation environment are discrete and fully observed, model-free approaches are well suited to decide which action to perform to maximize the reward when faced with a certain state.
With the success of DQN [17], more and more model-free approaches have been proposed, such as DDQN, Proximal policy optimization(PPO), A2C, A3C and other algorithms based on value function and policy gradient [18,19,20,21,22]. The mainstream application fields of DRL are robotics, neural machine translation, computer systems, etc. [23,24,25,26,27,28]. These industrial achievements have shown the effectiveness of the agent human-like decision-making. However, deep reinforcement learning has been less studied on the tactical decision-making problem of short track speed skating. Changpeng et al. [10] use a neural network to guide the agent to learn the correlation between state and action in the process of short-track speed skating. This method achieves more intelligent tactical decision-making ability than the traditional decision tree method, but over-reliance on prior knowledge leads to poor performance on the problem of going out of bounds.
Yang et al. [11] can improve the decision-making efficiency of agents through the DRL method to a certain extent. However, when the current state update is not available in that model, the lack of prior knowledge will cause the problem of the model to become complex, increasing the state space and slowing the convergence speed. In addition, the tactical decision as the action information in that article lacks a clear and scientific explanation of the setting.
The mainstream simulation environments used for deep reinforcement learning are generated by the gym toolkit or rendered by 3d engines such as unity3d and unreal engine [29,30,31]. To comprehensively save development costs and reduce computation, we use a scripted simulation environment to train agents.
3. Proposed Methods
3.1. Simulation Environment
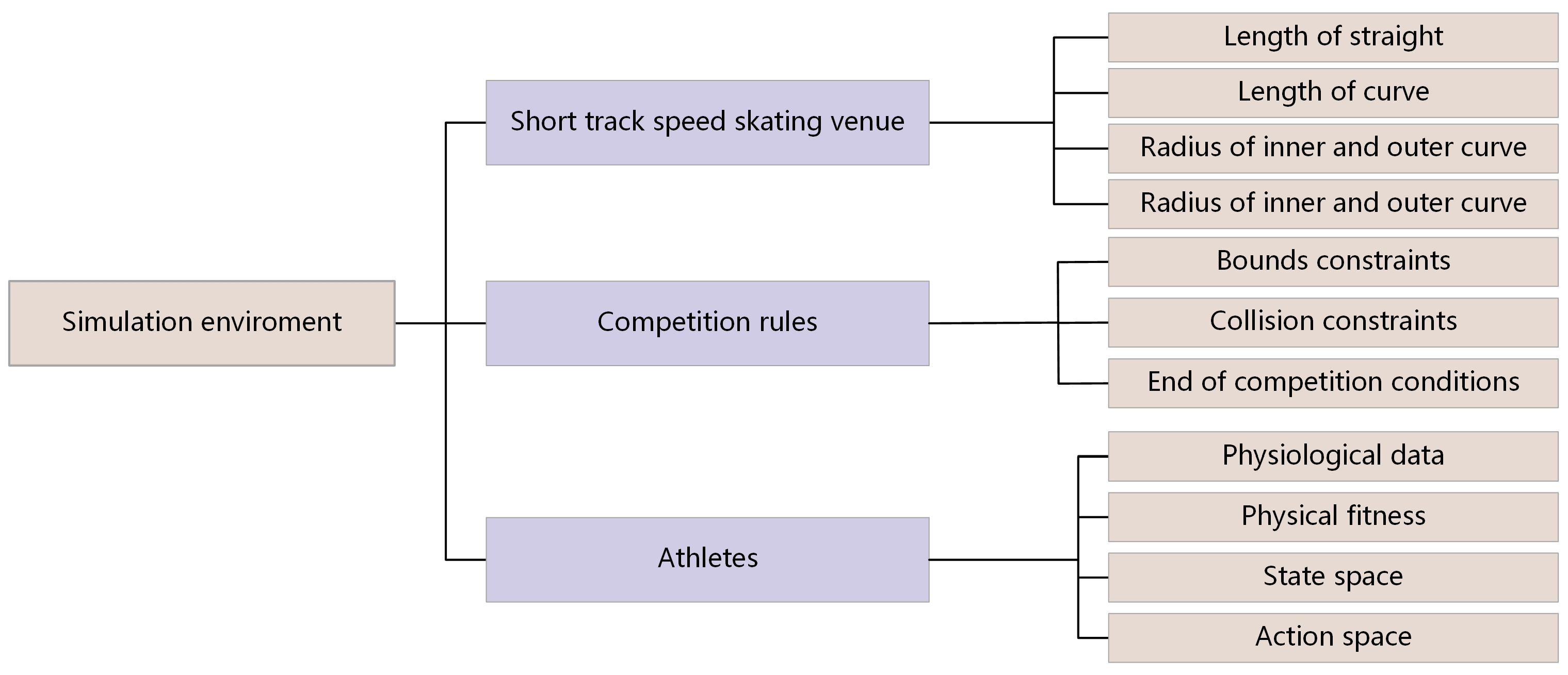
The simulation environment used in this paper is mainly composed of three parts: the venue, the competition rules and the athletes. The venue simulation is to model the basic information of the venue used in the short track speed skating competition, including the length of the straight, the length of the curve, the radius of the inner and outer curves, the start position and the end position of 500 m short track speed skating competition. According to the standard field information of short track speed skating, we set up a simulated competition field in a two-dimensional rectangular coordinate system.
The simulation modeling of competition rules mainly includes the constraints that athletes should strictly observe. For example, when skating on a curve section with six markers, athletes should skate outside of the markers. Athletes must avoid collisions during the competition, and they should clearly meet the conditions for completing the race.
The simulation modeling of athletes is based on the basic physiological data of athletes, physiological fitness, state space and action space. The physiological data mainly include the height and weight of the athlete, the average windward area of the body while skating, and the upper and lower limits of the skating speed and acceleration. Physiological fitness is the embodiment of the residual endurance of athletes, and it is one of the key factors affecting the performance of athletes. The state space and action space contain the state data and action data of the athletes every 0.1 s. The overall simulation environment is shown in Figure 1:
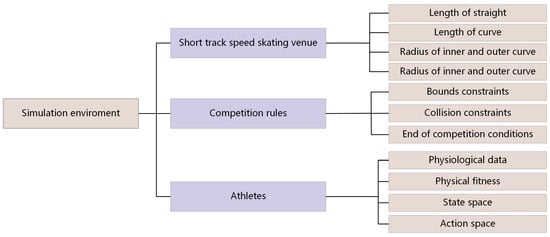
Figure 1.
The construction framework of the simulation environment.
3.2. State Space and Action Space
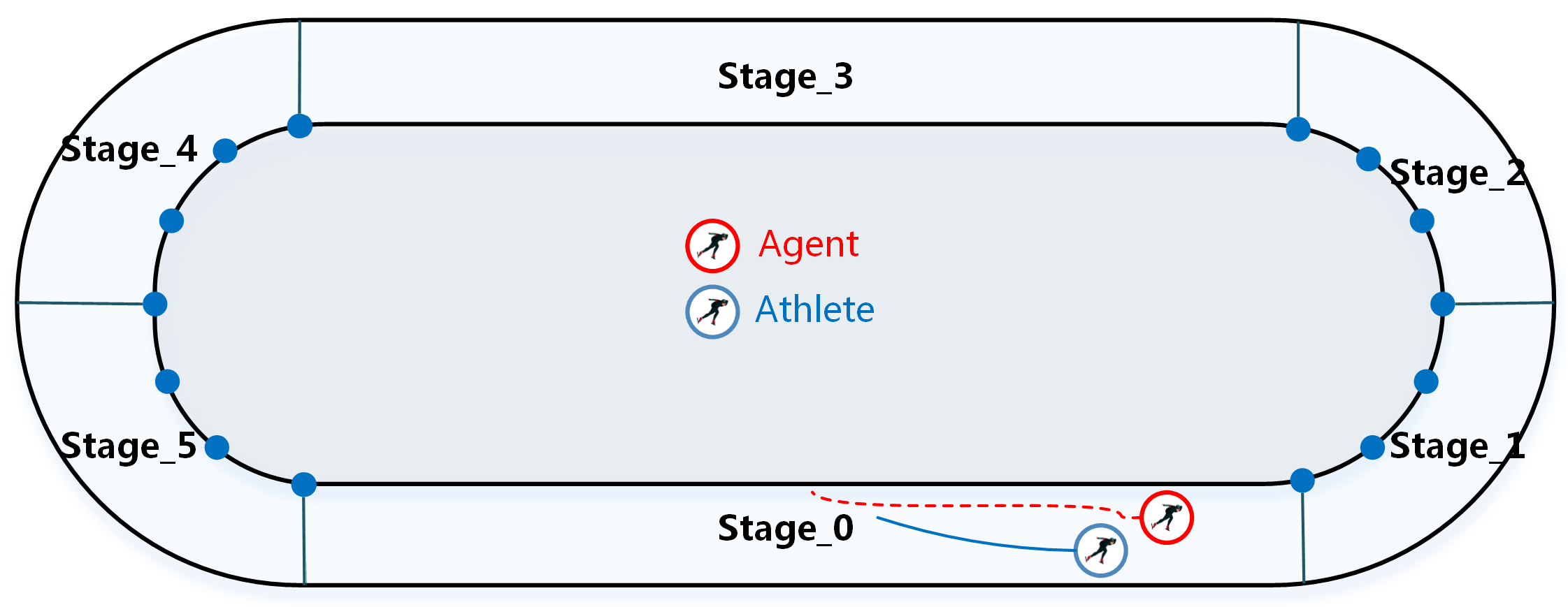
The state space mainly includes the two-dimensional coordinate information, ranking, physiological fitness, speed and the current stage. The action space contains motion direction d and acceleration a. After referencing a large amount of short track speed skating track data, we divide each lap of the race into six stages, as shown in Figure 2.
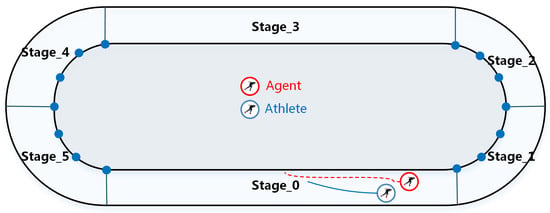
Figure 2.
Schematic diagram of the six stages.
Reasonable restrictions on the exploration ability of the agent can accelerate the training speed of the model. Therefore, each time the agent selects an action, it is given a target direction to guide it to complete the current stage faster. The target points and action space are defined as follows:
The state space at time t depends on the selection of the state space and action space of the agent at time . The sampling interval t of trajectory information in this experiment is 0.1 s, then the update rule of the velocity at time t and direction d are as follows:
The coordinate information at time is , and the direction and acceleration in the action space selected at this time are and , respectively. Then the coordinate information in the state space at time t is updated by the following rules:
Short track speed skaters need to correctly judge the physical energy consumption during the race. Konings [32] points out that the physical energy of short-track speed skaters to maintain speed or accelerate in the next few laps has an important impact on the final ranking of the race. Therefore, we design the physiological fitness to indirectly describe the remaining physical energy of the agent at different moments of the race. The speed of physiological fitness consumption mainly depends on the acceleration behavior of the agent and the amount of resistance that needs to be overcome during skating. The physical fitness is defined as follows:
represents the initial physical fitness of each athlete. is the friction coefficient. m is the mass of the athlete. g is the acceleration of gravity. C is the coefficient of air resistance. is the air density. S is the windward area of the athlete when skating. v is the instantaneous speed of the athlete, and and are the offsets of each dimension in the two-dimensional coordinate system in the sampling time, respectively.
3.3. Tactical Decision Model
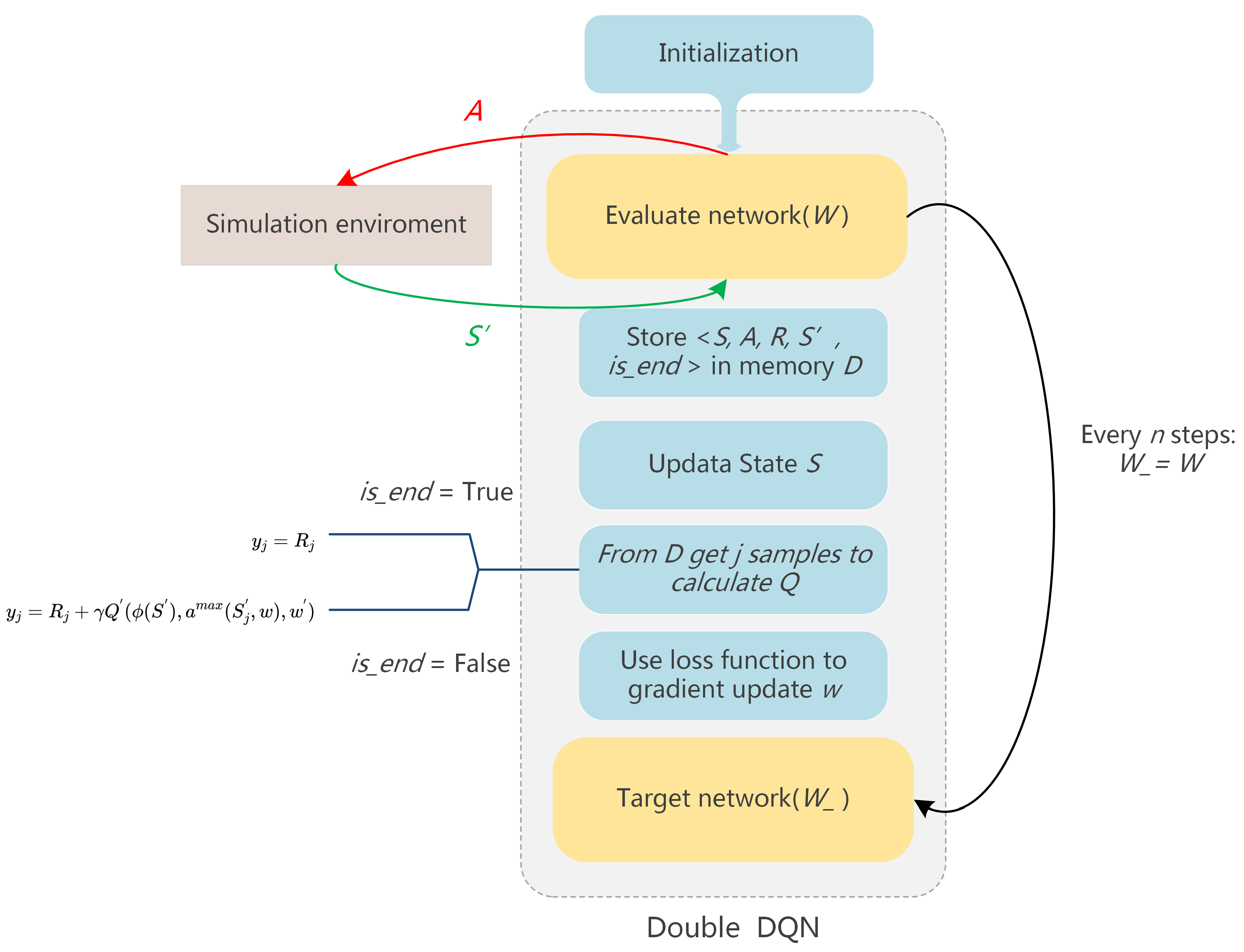
In this paper, the agent uses the DDQN algorithm to learn tactical decisions for short-track speed skating. DDQN replaces the traditional Q-table with a neural network, so it has the ability to solve large-scale reinforcement learning problems. It simultaneously optimizes the two steps of decoupling the target Q-value action selection and the target Q-value calculation, so as to eliminate the problem of over-estimation. The structure of the proposed model is shown in the Figure 3.
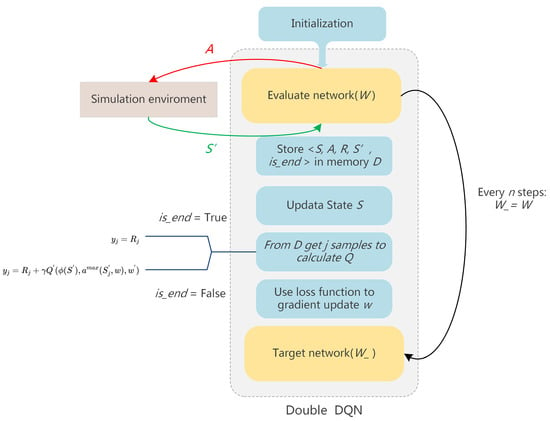
Figure 3.
The structure of the Double DQN we used in this article.
The input of the model is the state vector corresponding to our state S, and the output is the action-value function Q of all actions in that state. DDQN finds the action corresponding to the maximum Q value in the evaluate network, and then uses this action to calculate the Q value which is the y for j samples.
represents the current state, and represents the state after the agent performs action A. W and are the parameters of the evaluate network and target network, respectively. is the decay factor. R is the reward obtained with the reward function. Then the model updates the network parameters W by optimizing the loss function , and assigns the parameters of the evaluated network to the target network after updating the evaluation network every n time.
3.3.1. Reward Function
The setting of the reward function directly affects how quickly the model maximizes the reward for action or training by Q-value [33]. Too many positive rewards make the agent tend to stop exploring more rewards, which weakens exploration that might lead to failure, and too many negative rewards cause training to terminate prematurely. In this paper, the main goal of the athlete is to complete the race in the shortest possible time while reaching the finish line and to try to reserve enough energy for the later laps to execute the tactic flexibly. Therefore, we design the stage reward , physiological fitness reward and time reward to achieve the desired effect.
is the lap of the current race. and denote the current stage and the next stage that the agent should be in, respectively.
w is the physiological fitness defined in Equation (7), and we use function to regulate the stabilization of this reward.
The time reward is mainly determined by the competition time t of the agent and the average competition time of all athletes in that round. The total reward r is defined as follows:
3.3.2. Summary of Tactics
After full communication with the coach team, we summarize and analyze the behavior of the agent after training, and classify the short-track speed skating tactics of the agent and the athletes in the same experimental group based on each stage. The specific classification criteria are as follows:
Leading-skating tactic: the agent needs to do its best to become the first place as soon as possible at the current stage. If the agent is not currently in the first position, it needs to surpass to reach the leading position.
Following-skating tactic: if the agent is currently in the lead position, it continues to lead. If the agent is not in the first position, the opponent athlete in the previous position at the current instant should be the following target for the agent.
Full-speed tactic: the agent strives to reach the highest skating speed in the record in a short time. The agent is supposed to achieve the optimal situation of the current stage at the cost of a large amount of its physiological fitness.
Idle-speed tactic: the agent needs to control the speed to maintain good physiological fitness. This tactic is usually used to reserve the physiological fitness to execute other tactics when the situation appears to be deadlocked.
4. Results and Discussion
4.1. Experimental Composition and Settings
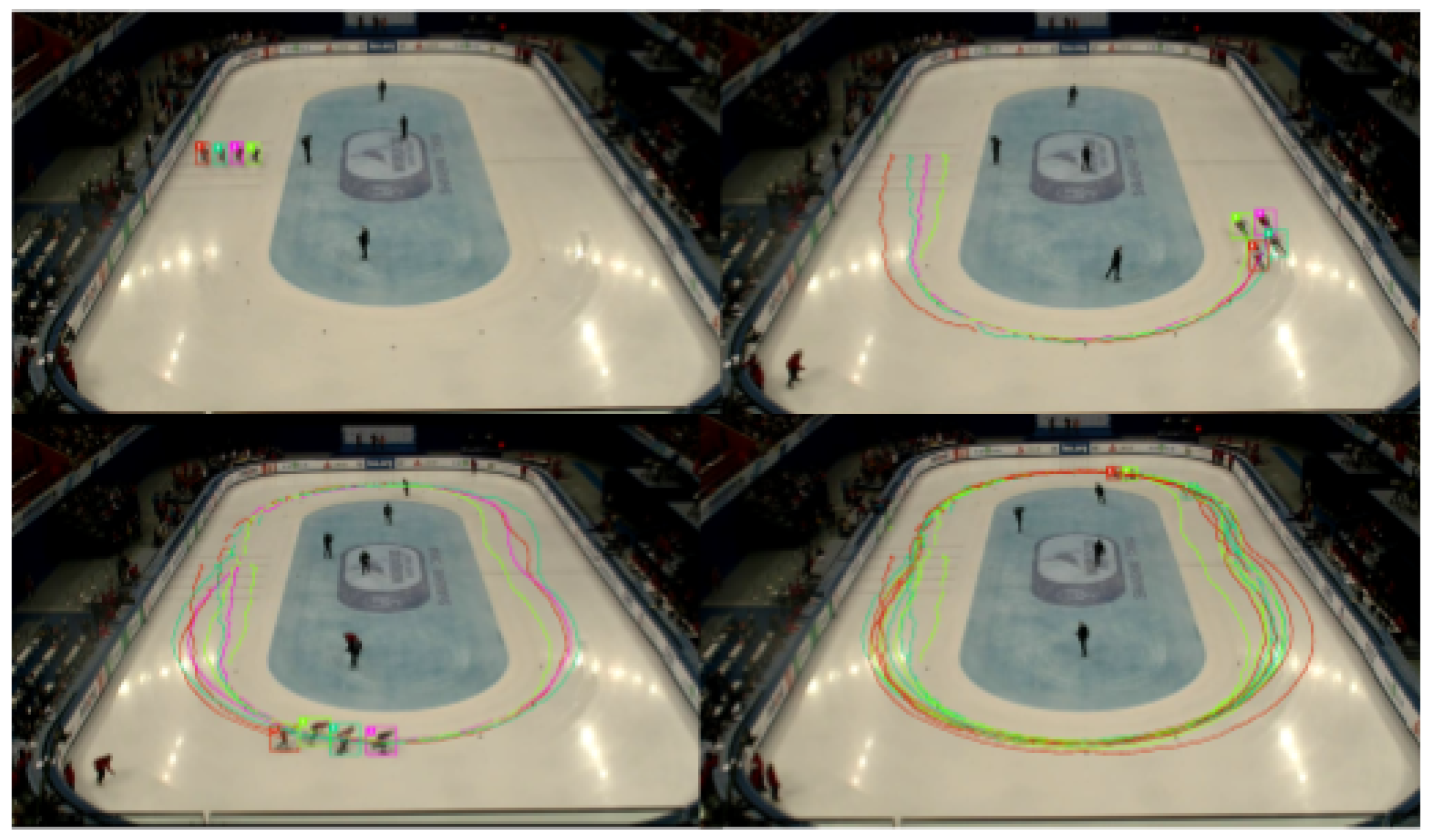
Based on the established simulation environment, we select 16 groups of real competition data of 500 m short track speed skaters as a data set and perform training for each competition. Specifically, in a short track speed skating competition, one athlete is randomly selected as the agent to replace him, and the remaining four athletes skate according to the real performance of the actual competition (Figure 4).
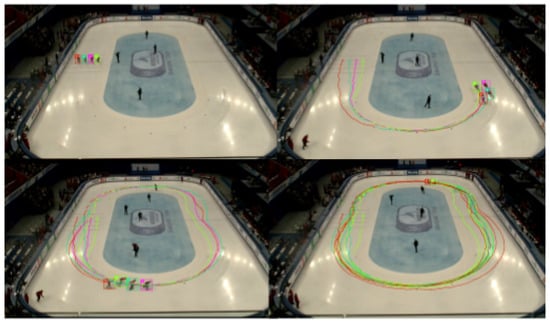
Figure 4.
Visualized trajectories of teal short track speed skating competitions.
All experiments in this paper are based on NVIDIA GeForce TX 1060 5 GB graphics card, 256 G RAM and Intel(R) Core(TM) i9-10900X CPU @ 3.70 GHz. The simulation environment and tactical decision model are based on PyTorch 1.7.1. The parameters of our model are shown in Table 1.

Table 1.
Experimental parameters setting.
4.2. Discussion
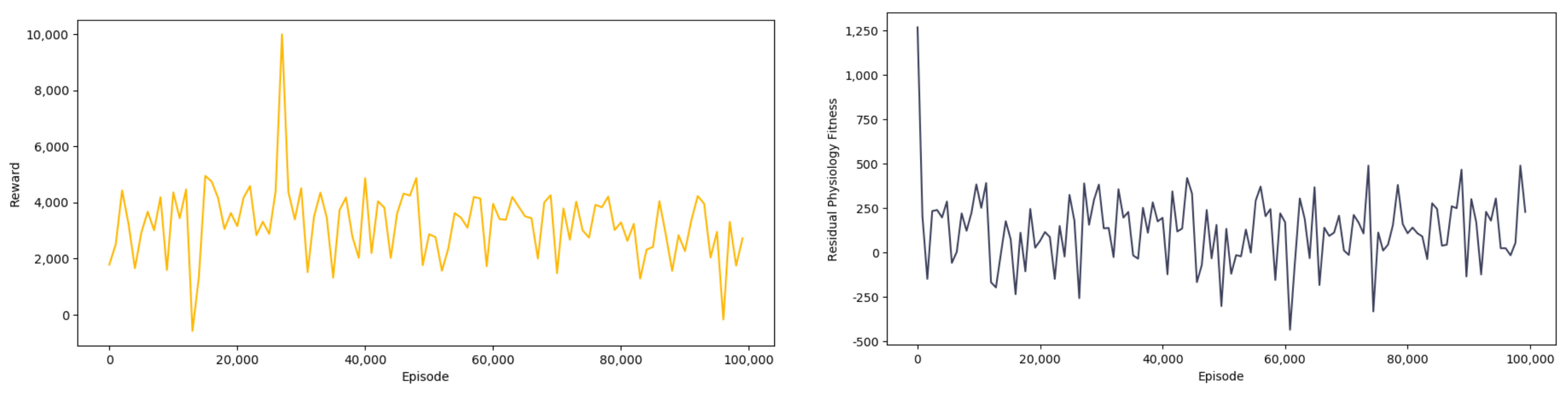
The reward chart and residual physiology fitness chart of the training are shown in Figure 5. It can be observed that through continuous learning and exploration, the reward obtained by the agent gradually converges from a poor reward value to a better reward value, and the agent can also allocate and use physical strength more scientifically in testing competition.
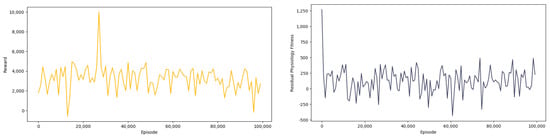
Figure 5.
The reward chart and residual physiology fitness chart.
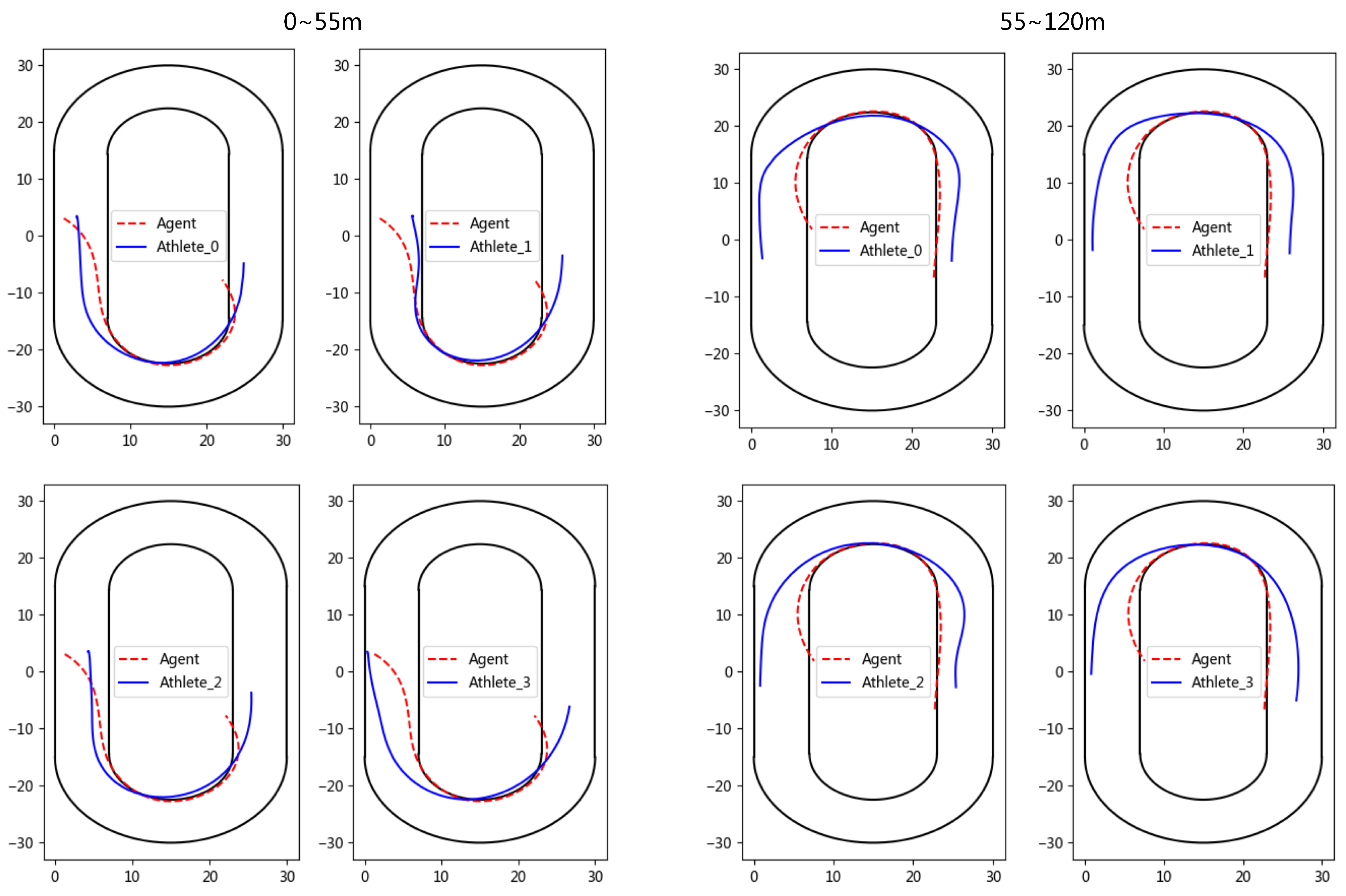
We randomly sample and visualize a group of test competition data for analysis, and mainly focus on the tactics of the first lap. As shown in Figure 6, it is clear that the agent is trained to enter the curve area and leave the curve area faster than the athlete, and the agent prefers to save energy in the straight and not surpass other athletes to gain the leading position. These data highlight the importance of the athlete effectively controlling the ankle and knee muscles during the curve section, as well as the ability of the athlete to anticipate body movements in advance.
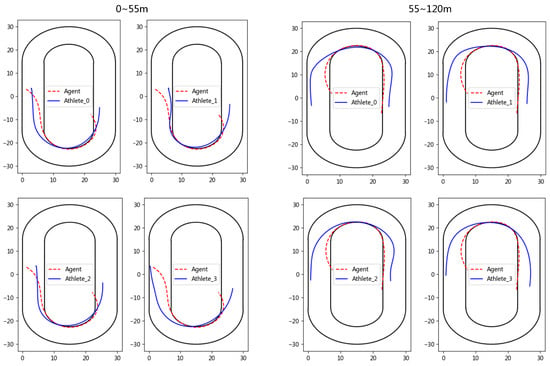
Figure 6.
The skating trajectory of the agent and athletes in the simulation competition.
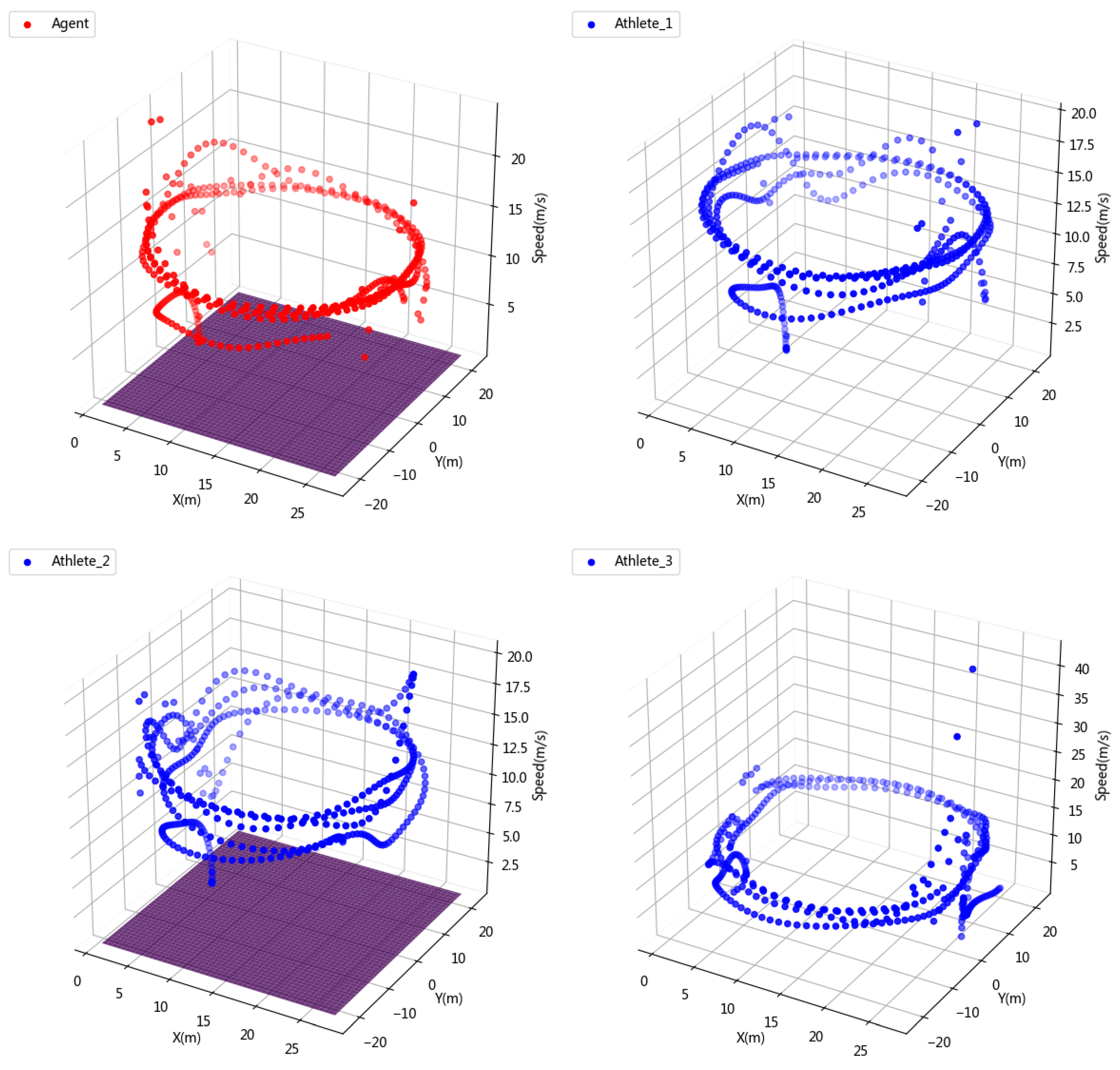
In order to see the speed change of the athletes and agents in the competition more intuitively, we visualize the three-dimensional information of position information and speed as shown in Figure 7. It can be seen that both the agent and the athlete increase their speed to the fastest skating speed in the second lap, which proves that the learning of physical energy allocation by the agent is almost no different from professional athletes. On the other hand, this also proves the scientific nature of our reward setting and also verifies the rationality of the physiological fitness distribution of the agent.
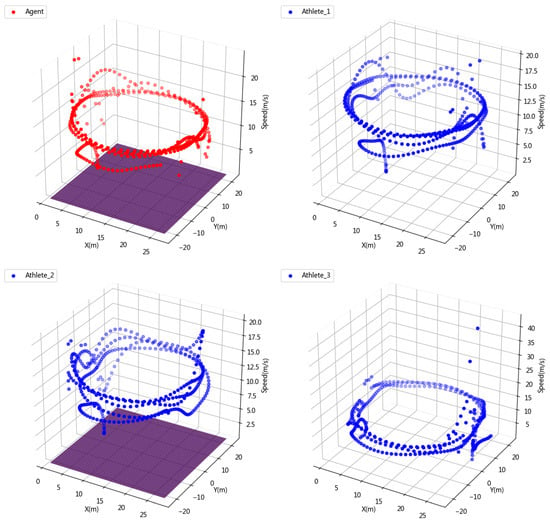
Figure 7.
3D simulation of short track speed skating competition data.
In order to verify the effectiveness of our proposed tactical decision model, we use the data of the same athlete for testing and compare our method with the decision tree model, neural network model and previous tactical decision-making method [11]. The experimental results are shown in Table 2.
Table 2.
Results of comparative experiments.
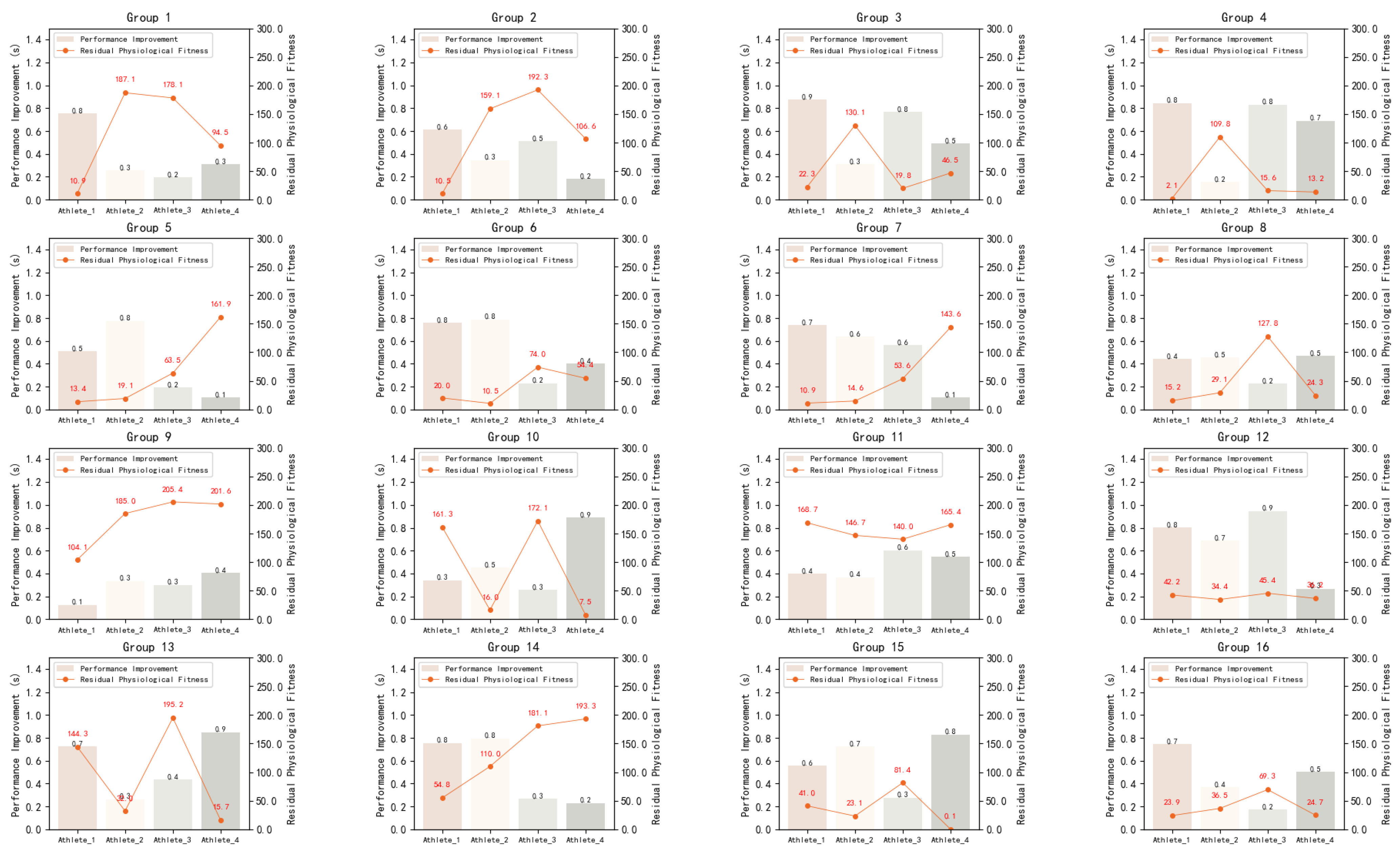
In order to better reflect the efficiency of the tactical decision model on the performance improvement of athletes and the allocation of physiological fitness, we show the results of 16 groups of experiments in Figure 8, where the X-axis is the performance improvement of 4 athletes, and the Y-axis is the performance improvement in seconds and the residual physiological fitness. It can be clearly found that the performance-improved agent can use almost all the physiological fitness in the experiments compared with the athletes. However, the agent with less performance improvement could not use up all of its physiological fitness, which also shows that blindly saving physical strength without applying correct tactics will have an impact on the performance of the competition.
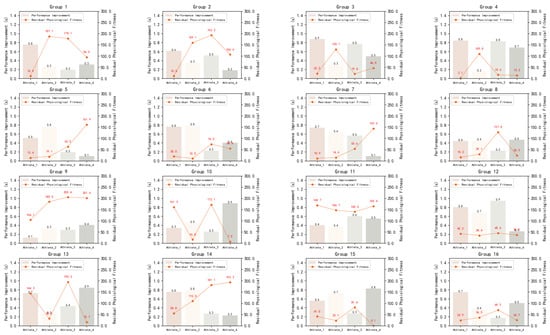
Figure 8.
Comparison of the real crossing time between 16 groups of competition athletes and the corresponding agent.
5. Conclusions
This paper mainly studies the tactical analysis and learning of short track speed skating based on deep reinforcement learning. We propose a tactical decision model for short track speed skating based on the DDQN model and guide the agent to learn better skating methods in the simulation environment. The trained skating behaviors are summarized into four skating strategies. 16 groups of experimental results show that our method can effectively improve the performance of athletes and physiological fitness. Compared with the decision tree, neural network and tactical decision-making method, our result is improved by 5.3 s, 3.7 s and 1.1 s, respectively. Our future work will focus on analyzing more data related to the muscle strength of athletes’ knee and ankle joints, as well as developing methods to assess athletes’ psychological resilience when facing major events. This will provide athletes with more intelligent and reliable guidance to improve their performance.
Author Contributions
Conceptualization, methodology, visualization, writing—original draft and editing, Y.Y.; supervision, project administration, and funding acquisition, F.L.; supervision, H.C. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the National Key Research and Development Program of China under Grant No. 2019YFF0301801, and the National Natural Science Foundation of China under Grant No. 61806199.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
For the short track speed skater data set, the need for informed consent was waived, but all participants were given clear information about the study, and their non-opposition was obtained.
Data Availability Statement
Due to the nature of this research, participants of this study did not agree for their data to be shared publicly, so supporting data are not available.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Felser, S.; Behrens, M.; Fischer, S.; Heise, S.; Bäumler, M.; Salomon, R.; Bruhn, S. Relationship between strength qualities and short track speed skating performance in young athletes. Scand. J. Med. Sci. Sport. 2016, 26, 165–171. [Google Scholar] [CrossRef]
- Deguire, S.; Billaut, F.; Bieuzen, F. Time decay in the performance benefits from repeated-sprint training in hypoxia in world-class short-track speed skaters. Int. J. Sport. Physiol. Perform. 2023, 1, 711–717. [Google Scholar] [CrossRef] [PubMed]
- Noorbergen, O.S.; Konings, M.J.; Micklewright, D.; Elferink-Gemser, M.T.; Hettinga, F.J. Pacing behavior and tactical positioning in 500-and 1000-m short-track speed skating. Int. J. Sport. Physiol. Perform. 2016, 11, 742–748. [Google Scholar] [CrossRef] [PubMed]
- Hext, A.; Hettinga, F.J.; McInerney, C. Tactical positioning behaviours in short-track speed skating: A static and dynamic sequence analysis. J. Sport. Sci. 2023, 41, 727–735. [Google Scholar] [CrossRef]
- Knobbe, A.; Orie, J.; Hofman, N.; der Burgh, B.V.; Cachucho, R. Sports analytics for professional speed skating. Data Min. Knowl. Discov. 2017, 31, 1872–1902. [Google Scholar] [CrossRef]
- Nicola Bullock, T.D.M.; Zhang, A. Performance analysis of world class short track speed skating: What does it take to win? Int. J. Perform. Anal. Sport 2008, 8, 9–18. [Google Scholar] [CrossRef]
- Muehlbauer, T.; Schindler, C. Relationship between starting and finishing position in short track speed skating races. Eur. J. Sport Sci. 2011, 11, 225–230. [Google Scholar] [CrossRef]
- Haug, W.B.; Drinkwater, E.J.; Mitchell, L.J.; Chapman, D.W. The relationship between start performance and race outcome in elite 500-m short-track speed skating. Int. J. Sport. Physiol. Perform. 2015, 10, 902–906. [Google Scholar] [CrossRef] [PubMed]
- Maw, S.; Proctor, L.; Vredenburg, J.; Ehlers, P. Influence of starting position on finishing position in world cup 500 m short track speed skating. J. Sport. Sci. 2006, 24, 1239–1246. [Google Scholar] [CrossRef] [PubMed]
- Liu, C. Decision-making of agent based on bp neural networks in short track speed skating simulation system. Intell. Comput. Appl. 2011. Available online: https://api.semanticscholar.org/CorpusID:63141558 (accessed on 14 December 2023).
- Yang, W.; Chen, Y.; Li, F.; Chang, H. A tactical decision-making method for short track speed skating based on deep reinforcement learning. In Proceedings of the ISCTT 2022, 7th International Conference on Information Science, Computer Technology and Transportation, Xishuangbanna, China, 27–29 May 2022; VDE: Berlin, Germany, 2022; pp. 1–9. [Google Scholar]
- Van Hasselt, H.; Guez, A.; Silver, D. Deep reinforcement learning with double q-learning. In Proceedings of the AAAI Conference on Artificial Intelligence, Phoenix, AZ, USA, 12–17 February 2016; Volume 30. [Google Scholar]
- Kaloev, M.; Krastev, G. Experiments focused on exploration in deep reinforcement learning. In Proceedings of the 2021 5th International Symposium on Multidisciplinary Studies and Innovative Technologies (ISMSIT), Ankara, Turkey, 21–23 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 351–355. [Google Scholar]
- Wang, H.-N.; Liu, N.; Zhang, Y.-Y.; Feng, D.-W.; Huang, F.; Li, D.-S.; Zhang, Y.-M. Deep reinforcement learning: A survey. Front. Inf. Technol. Electron. Eng. 2020, 21, 1726–1744. [Google Scholar] [CrossRef]
- Sutton, R.S.; Barto, A.G. Reinforcement Learning: An Introduction; MIT Press: Cambridge, UK, 2018. [Google Scholar]
- Li, Y. Deep reinforcement learning: An overview. arXiv 2017, arXiv:1701.07274. [Google Scholar]
- Mnih, V.; Kavukcuoglu, K.; Silver, D.; Graves, A.; Antonoglou, I.; Wierstra, D.; Riedmiller, M. Playing atari with deep reinforcement learning. arXiv 2013, arXiv:1312.5602. [Google Scholar]
- Haarnoja, T.; Zhou, A.; Abbeel, P.; Levine, S. Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor. In Proceedings of the International Conference on Machine Learning, Stockholm, Sweden, 10–15 July 2018; pp. 1861–1870. [Google Scholar]
- Zhao, D.; Wang, H.; Shao, K.; Zhu, Y. Deep reinforcement learning with experience replay based on sarsa. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Chua, K.; Calandra, R.; McAllister, R.; Levine, S. Deep reinforcement learning in a handful of trials using probabilistic dynamics models. In Advances in Neural Information Processing Systems; Curran Associates, Inc.: Red Hook, NY, USA, 2018; Volume 31. [Google Scholar]
- Mnih, V.; Badia, A.P.; Mirza, M.; Graves, A.; Lillicrap, T.; Harley, T.; Silver, D.; Kavukcuoglu, K. Asynchronous methods for deep reinforcement learning. In Proceedings of the International Conference on Machine Learning, New York, NY, USA, 20–22 June 2016; pp. 1928–1937. [Google Scholar]
- Schulman, J.; Wolski, F.; Dhariwal, P.; Radford, A.; Klimov, O. Proximal policy optimization algorithms. arXiv 2017, arXiv:1707.06347. [Google Scholar]
- Hoel, C.-J.; Driggs-Campbell, K.; Wolff, K.; Laine, L.; Kochenderfer, M.J. Combining planning and deep reinforcement learning in tactical decision making for autonomous driving. IEEE Trans. Intell. Veh. 2020, 5, 294–305. [Google Scholar] [CrossRef]
- Li, G.; Yang, Y.; Li, S.; Qu, X.; Lyu, N.; Li, S.E. Decision making of autonomous vehicles in lane change scenarios: Deep reinforcement learning approaches with risk awareness. Transp. Res. Part Emerg. Technol. 2022, 134, 103452. [Google Scholar] [CrossRef]
- Peng, J.; Zhang, S.; Zhou, Y.; Li, Z. An integrated model for autonomous speed and lane change decision-making based on deep reinforcement learning. IEEE Trans. Intell. Transp. Syst. 2022, 23, 21848–21860. [Google Scholar] [CrossRef]
- Alizadeh, A.; Moghadam, M.; Bicer, Y.; Ure, N.K.; Yavas, U.; Kurtulus, C. Automated lane change decision making using deep reinforcement learning in dynamic and uncertain highway environment. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1399–1404. [Google Scholar]
- Kiran, B.R.; Sobh, I.; Talpaert, V.; Mannion, P.; Sallab, A.A.A.; Yogamani, S.; Pérez, P. Deep reinforcement learning for autonomous driving: A survey. IEEE Trans. Intell. Transp. Syst. 2021, 23, 4909–4926. [Google Scholar] [CrossRef]
- Aytar, Y.; Pfaff, T.; Budden, D.; Paine, T.; Wang, Z.; De Freitas, N. Playing hard exploration games by watching youtube. In Advances in Neural Information Processing Systems; Curran Associates, Inc.: Red Hook, NY, USA, 2018; Volume 3. [Google Scholar]
- Lin, M.; Shan, L.; Zhang, Y. Research on robot arm control based on Unity3D machine learning. J. Phys. Conf. Ser. 2020, 1633, 012007. [Google Scholar] [CrossRef]
- Sapio, F.; Ratini, R. Developing and testing a new reinforcement learning toolkit with unreal engine. In International Conference on Human-Computer Interaction; Springer: Berlin/Heidelberg, Germany, 2022; pp. 317–334. [Google Scholar]
- Shahbaz, M.; Khan, A. Autonomous navigation of swarms in 3d environments using deep reinforcement learning. In Proceedings of the 2020 International Symposium on Recent Advances in Electrical Engineering & Computer Sciences (RAEE & CS), Islamabad, Pakistan, 20–22 October 2020; Volume 5, pp. 1–6. [Google Scholar]
- Konings, M. Pacing and Opponents: The Regulation of Exercise Intensity during Competition. Ph.D. Thesis, University of Essex, Colchester, UK, 2018. [Google Scholar]
- Watkins, C.J.; Dayan, P. Q-learning. Mach. Learn. 1992, 8, 279–292. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).