
Monitoring Irrigation in Small Orchards with Cosmic-Ray Neutron Sensors

 ,
,  ,
,  ,
,  ,
,  , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
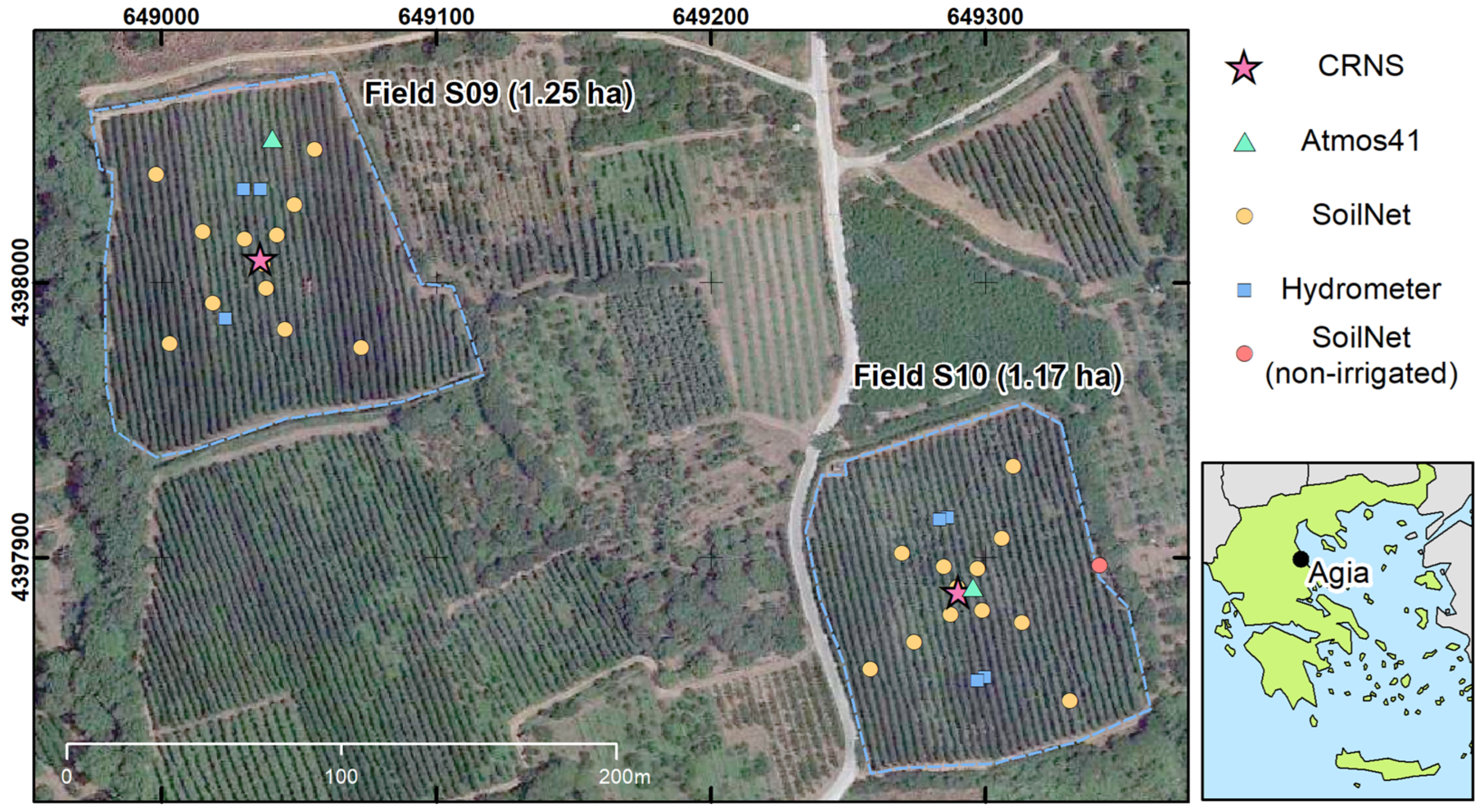
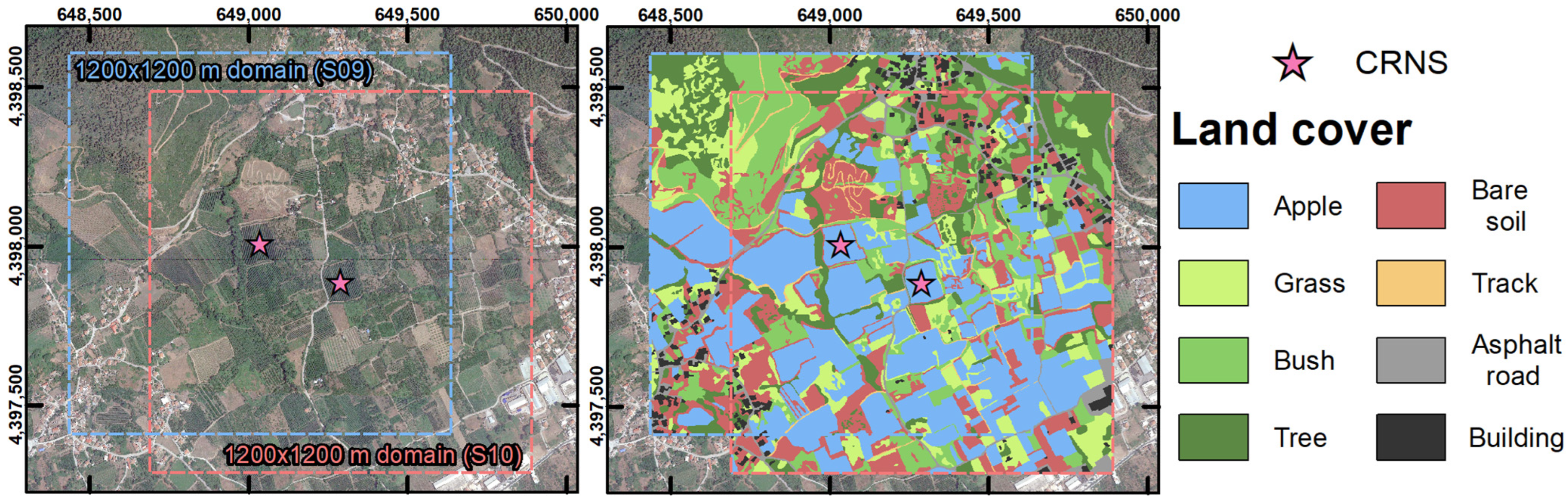
2.1. Study Area, Soil Sampling, and Installed Instrumentation
2.1.1. In-Situ Soil Sampling for CRNS Calibration
2.1.2. Reference SM from SoilNet Data
2.2. Monte Carlo Simulations of Neutron Transport
2.2.1. Neutron Origins from Existing URANOS Simulations
2.2.2. Neutron Origins from URANOS Simulations of the Study Area
2.3. CRNS-Derived SM and Novel Correction for Small Irrigated Fields
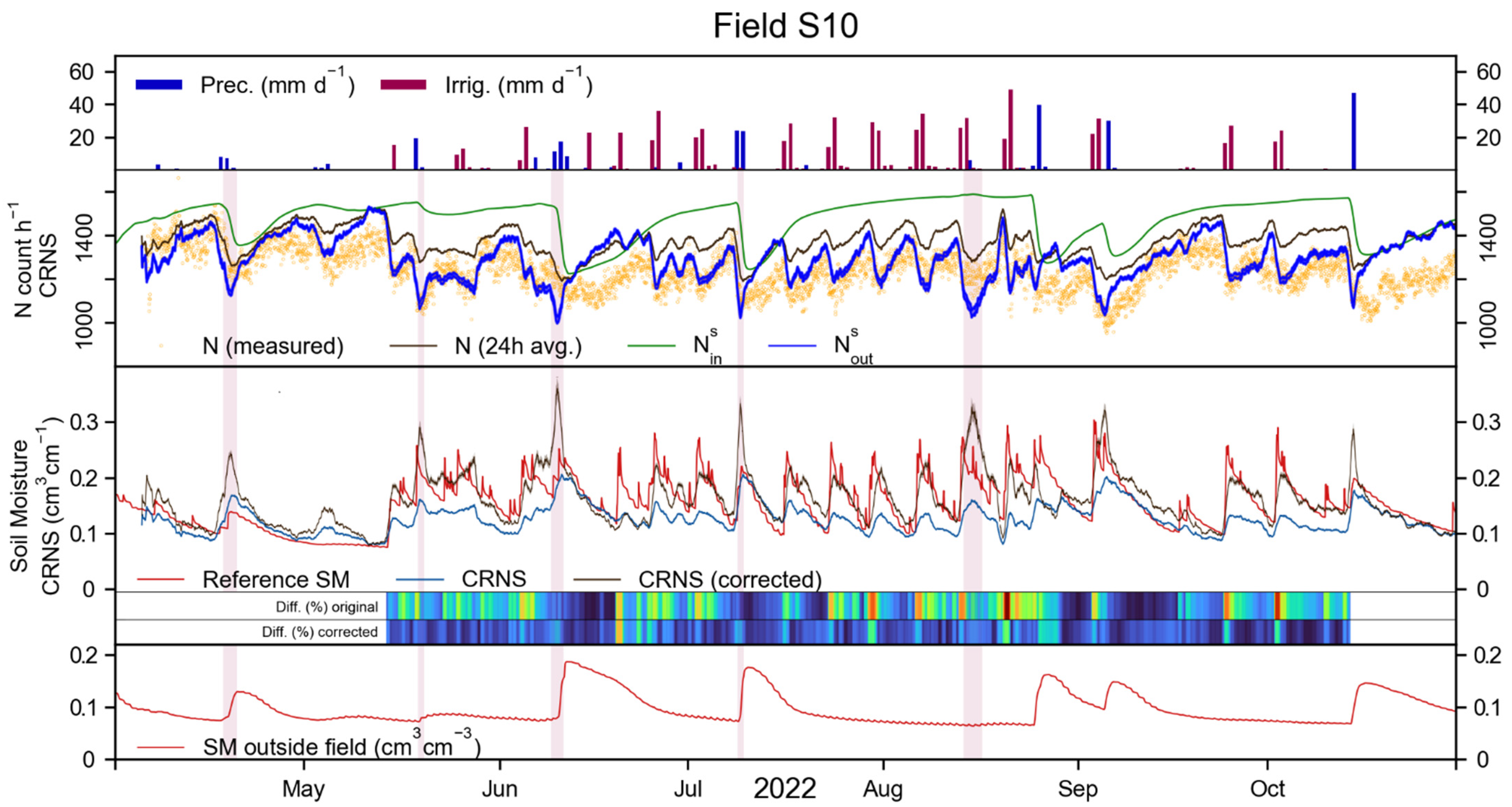
2.3.1. Neutron Count Correction and Conversion to SM Content
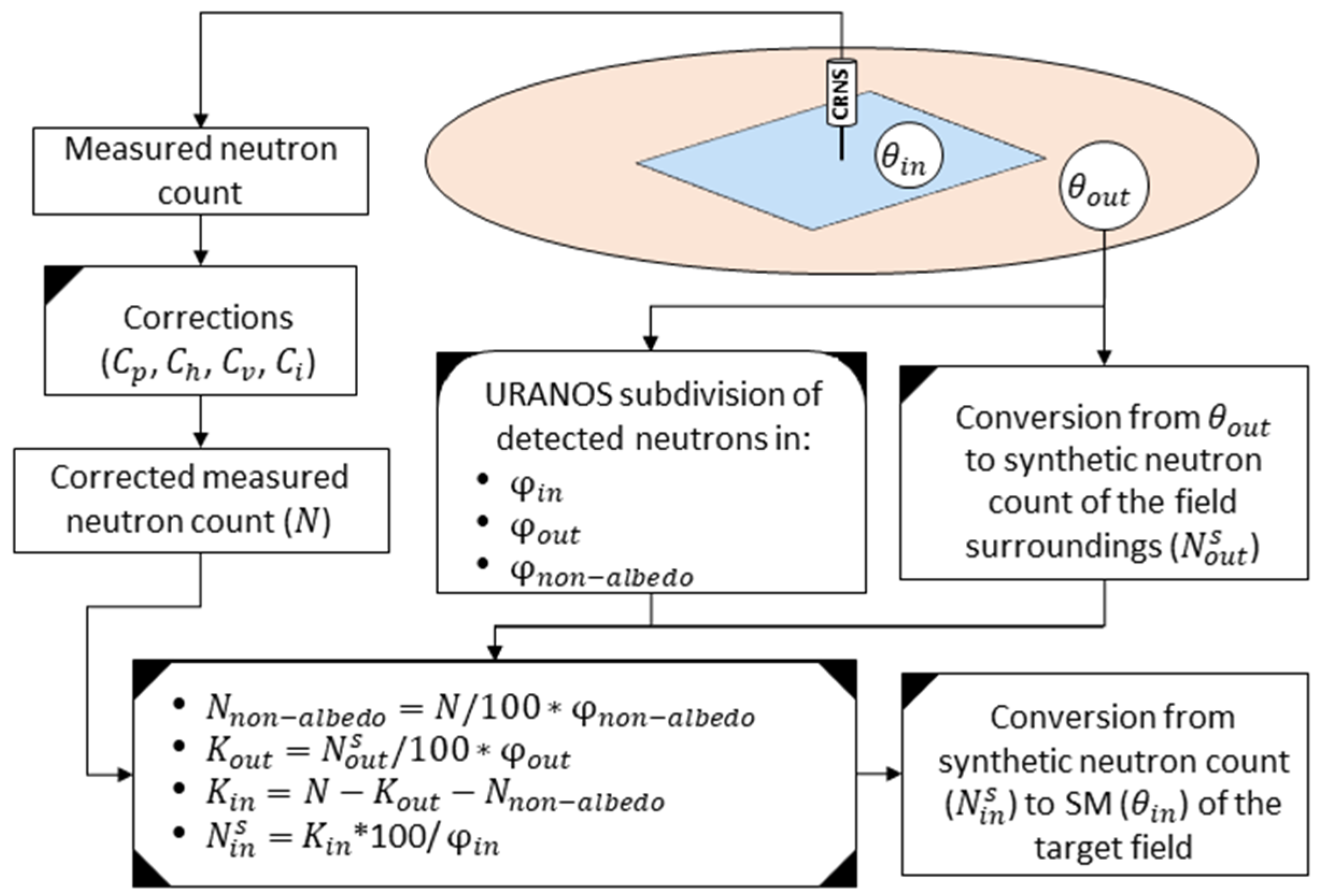
2.3.2. Novel CRNS Correction for Small, Irrigated Fields
- First, is used to calculate the portion of that is composed of non-albedo neutrons using: ;
- Then, a coefficient, that is proportional to the that would be measured if the CRNS was solely surrounded by a SM equal to , is obtained using: ;
- In the following step, a coefficient, that is proportional to the that would be measured if the CRNS was solely surrounded by a SM equal to , is obtained using: ;
- Finally, the synthetic neutron count is obtained using . This is then used in Equation (6) to estimate the SM in the irrigated field ().
3. Results and Discussion
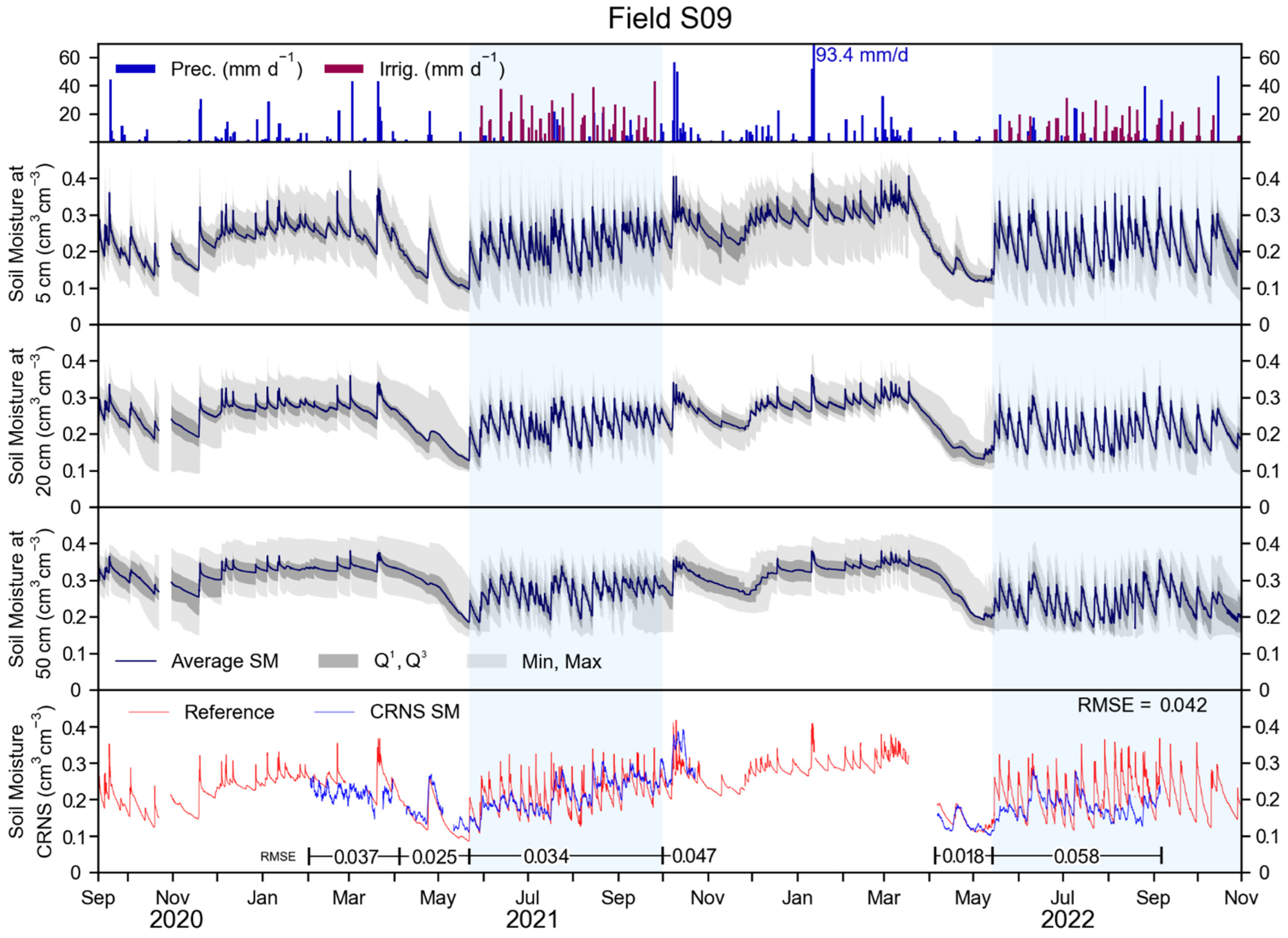
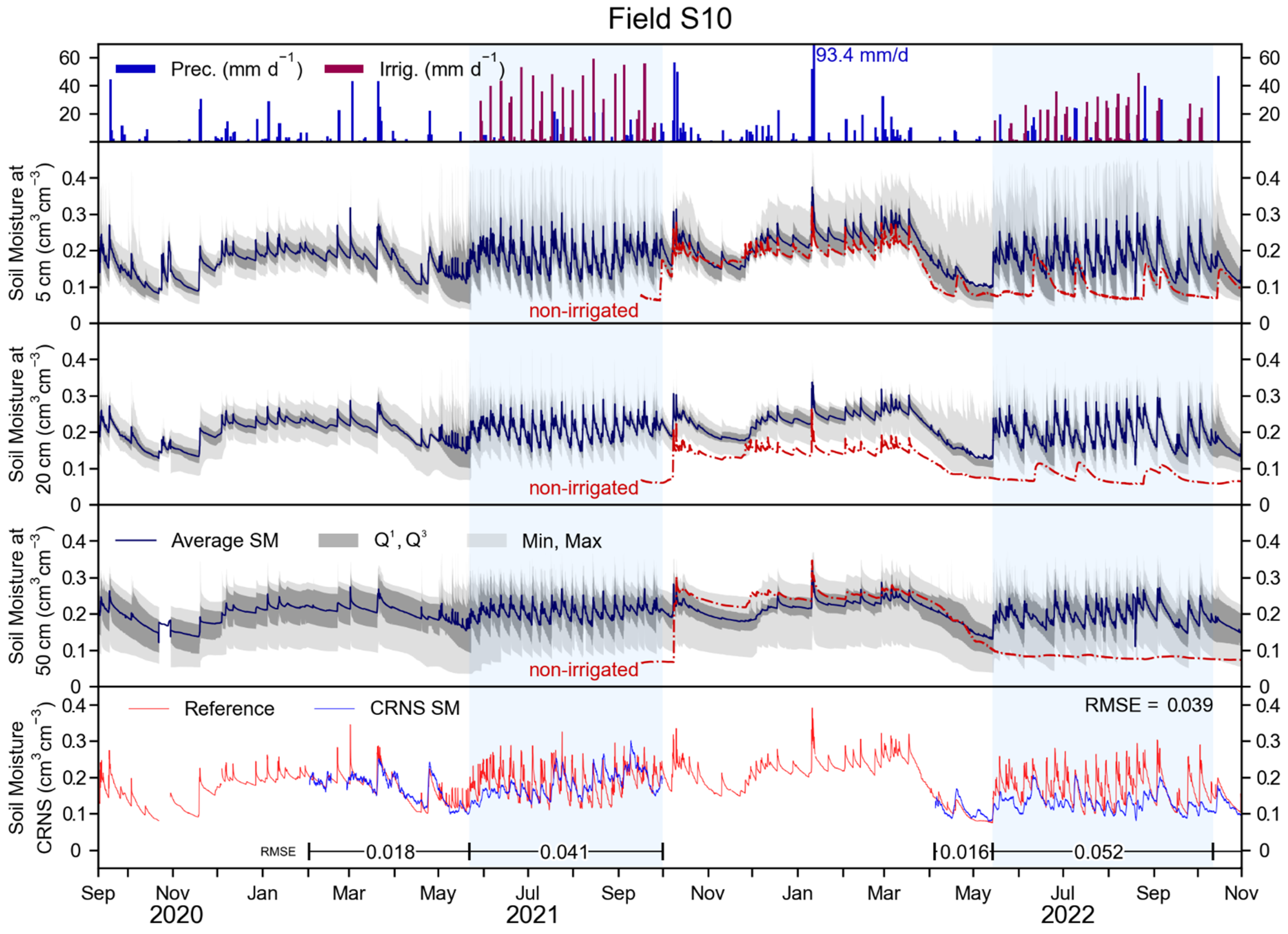
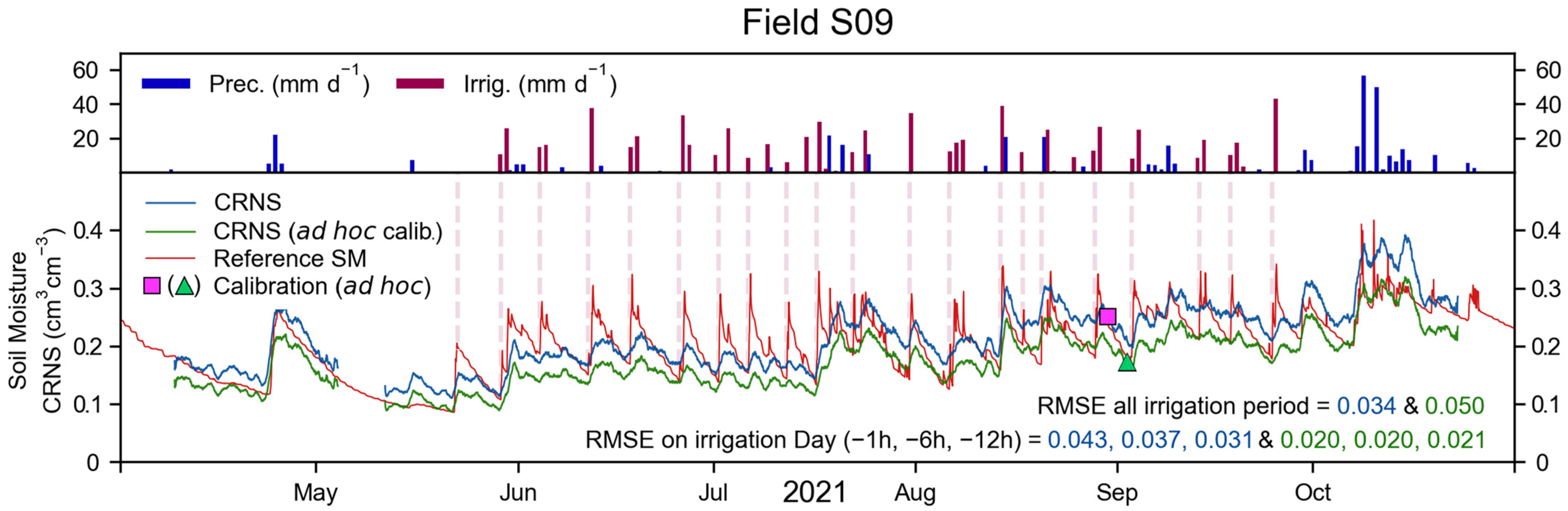
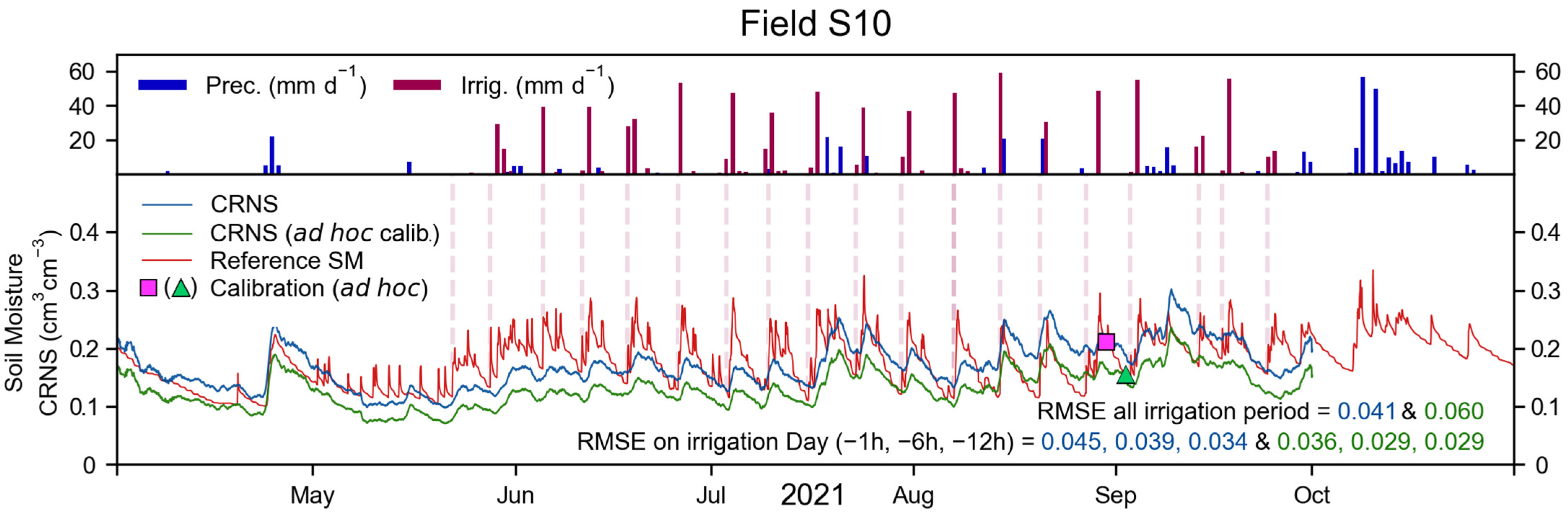
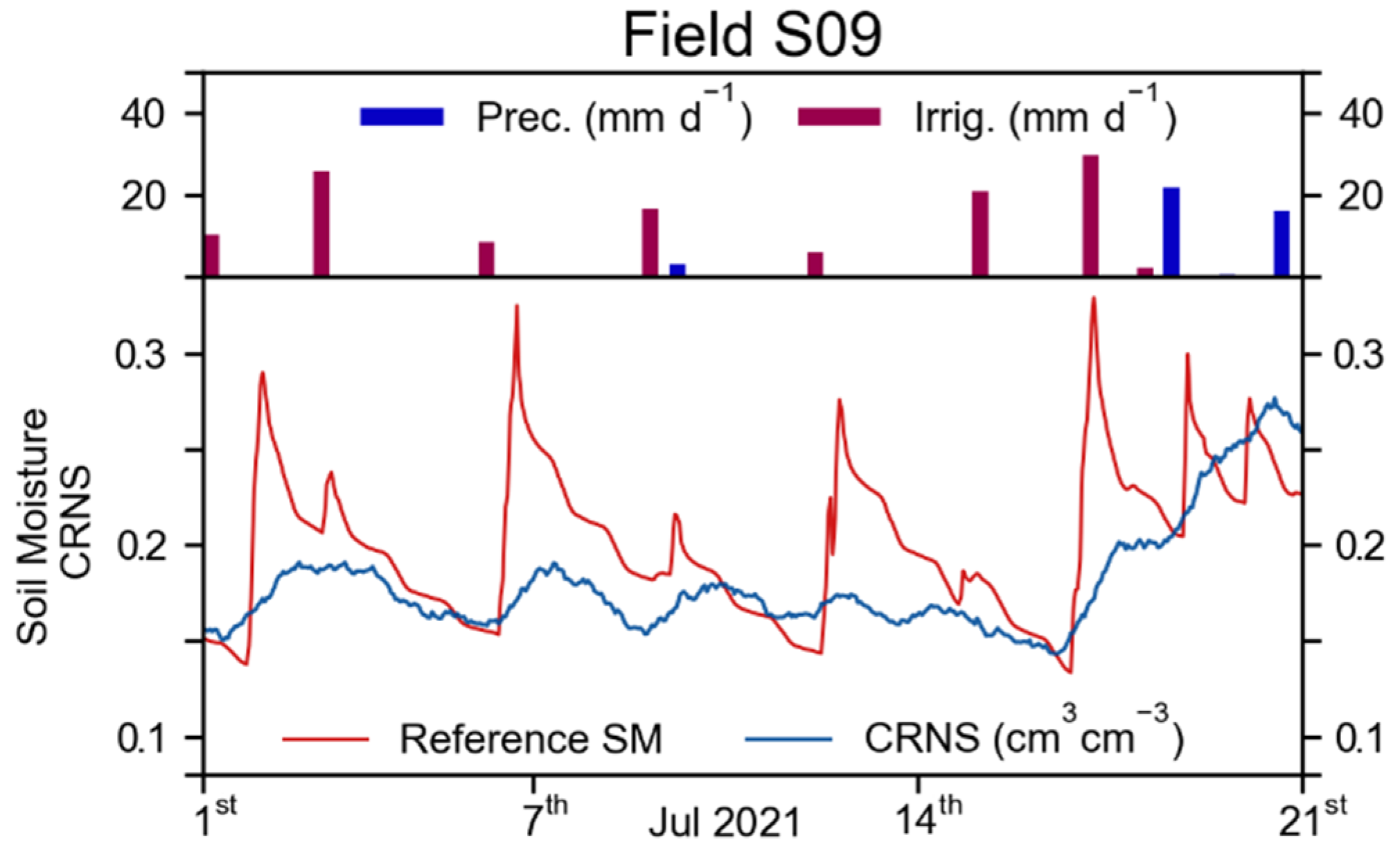
3.1. Measurements in the Target Fields and CRNS-Derived SM
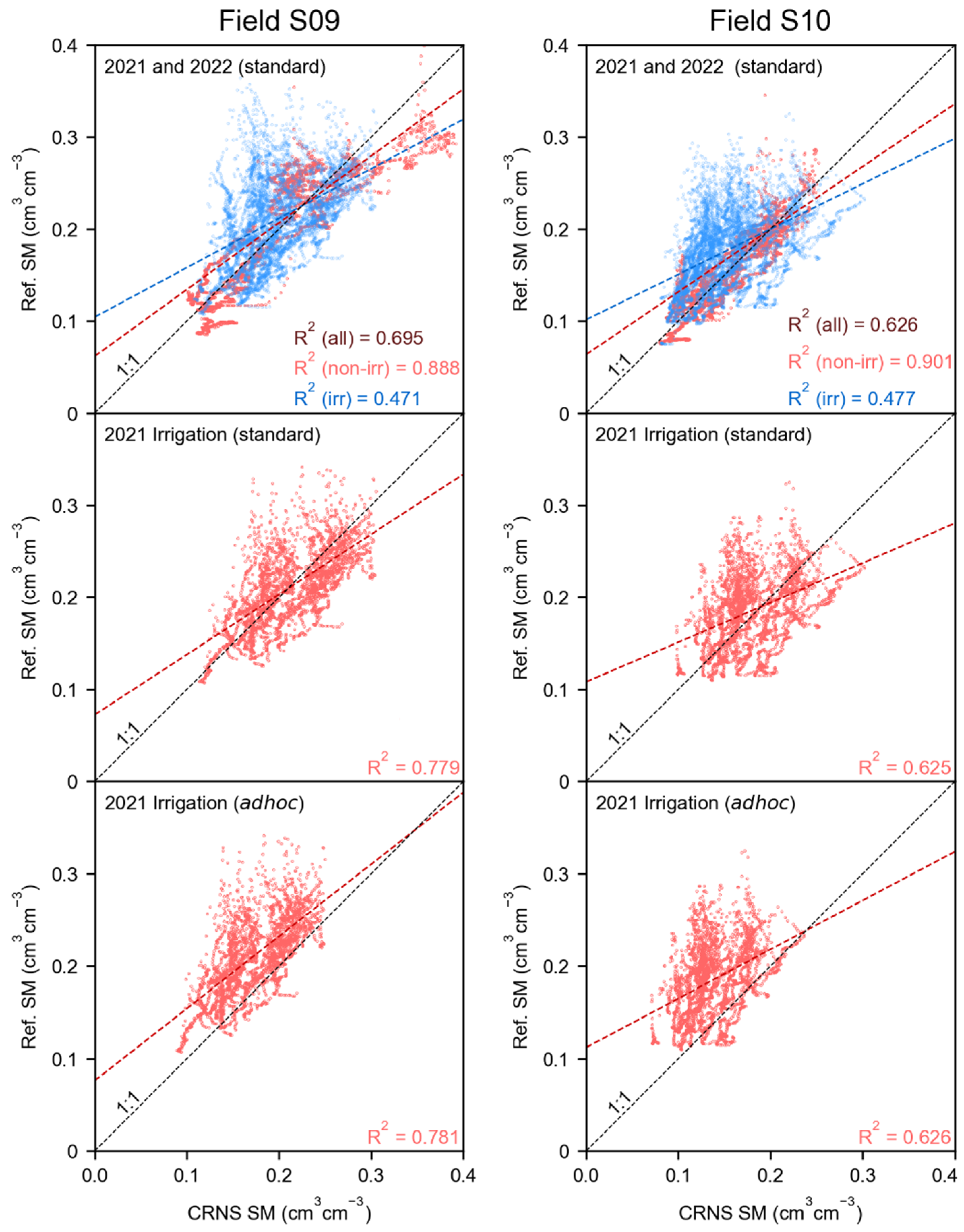
3.2. Monitoring and Informing Irrigation Practices Using Different Calibrations
3.3. Neutron Transport Simulations
3.3.1. φin, φout, and from Existing Neutron Transport Simulations
3.3.2. , , and from Novel Neutron Transport Simulations of the Agia Area
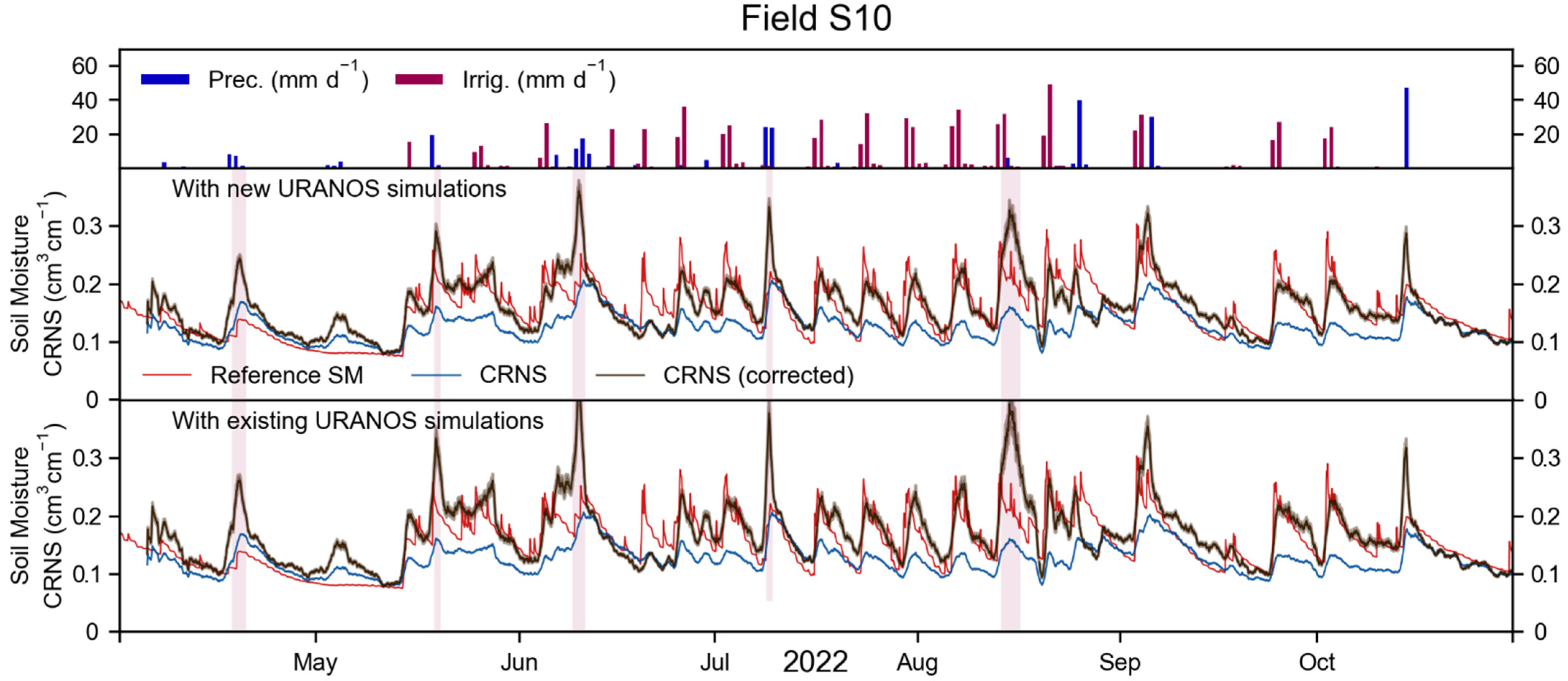
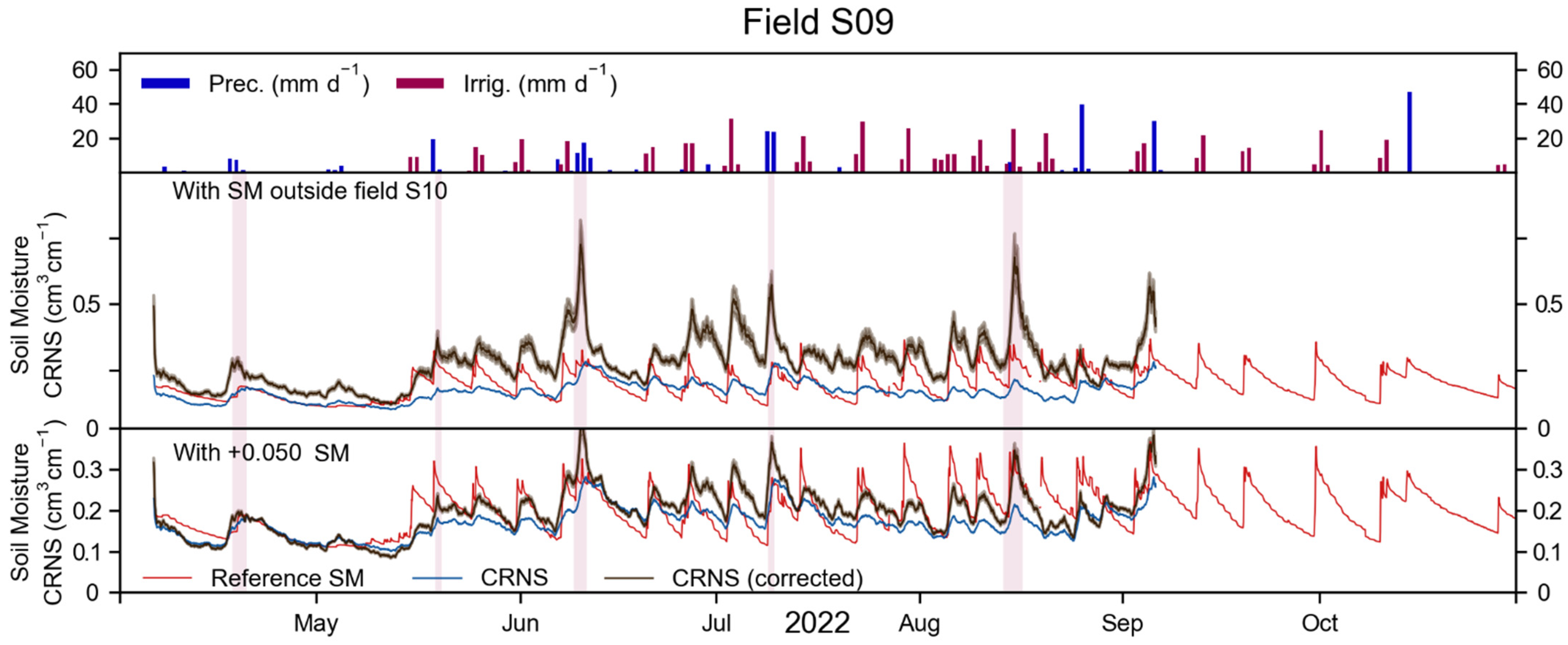
3.4. CRNS Correction with SM Outside the Irrigated Field
3.5. Limitations of the CRNS Correction Approach and Outlook
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B

Appendix C

Appendix D

Appendix E

References
- Shiklomanov, I.A.; Rodda, J.C. World Water Resources at the Beginning of the Twenty-First Century; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Rost, S.; Gerten, D.; Bondeau, A.; Lucht, W.; Rohwer, J.; Schaphoff, S. Agricultural green and blue water consumption and its influence on the global water system. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef] [Green Version]
- Thivet, G.; Fernandez, S. Water Demand Management: The Mediterranean Experience; Global Water Partnership: Stockholm, Sweden, 2012. [Google Scholar]
- Bangash, R.F.; Passuello, A.; Sanchez-Canales, M.; Terrado, M.; López, A.; Elorza, F.J.; Ziv, G.; Acuña, V.; Schuhmacher, M. Ecosystem services in Mediterranean river basin: Climate change impact on water provisioning and erosion control. Sci. Total Environ. 2013, 458, 246–255. [Google Scholar] [CrossRef]
- Chenoweth, J.; Hadjinicolaou, P.; Bruggeman, A.; Lelieveld, J.; Levin, Z.; Lange, M.A.; Xoplaki, E.; Hadjikakou, M. Impact of climate change on the water resources of the eastern Mediterranean and Middle East region: Modeled 21st century changes and implications. Water Resour. Res. 2011, 47, W06506. [Google Scholar] [CrossRef]
- García-Ruiz, J.M.; López-Moreno, J.I.; Vicente-Serrano, S.M.; Lasanta–Martínez, T.; Beguería, S. Mediterranean water resources in a global change scenario. Earth-Sci. Rev. 2011, 105, 121–139. [Google Scholar] [CrossRef] [Green Version]
- Milano, M.; Ruelland, D.; Fernandez, S.; Dezetter, A.; Fabre, J.; Servat, E.; Fritsch, J.-M.; Ardoin-Bardin, S.; Thivet, G. Current state of Mediterranean water resources and future trends under climatic and anthropogenic changes. Hydrol. Sci. J. 2013, 58, 498–518. [Google Scholar] [CrossRef] [Green Version]
- Gontia, N.; Tiwari, K. Development of crop water stress index of wheat crop for scheduling irrigation using infrared thermometry. Agric. Water Manag. 2008, 95, 1144–1152. [Google Scholar] [CrossRef]
- Damm, A.; Cogliati, S.; Colombo, R.; Fritsche, L.; Genangeli, A.; Genesio, L.; Hanus, J.; Peressotti, A.; Rademske, P.; Rascher, U. Response times of remote sensing measured sun-induced chlorophyll fluorescence, surface temperature and vegetation indices to evolving soil water limitation in a crop canopy. Remote Sens. Environ. 2022, 273, 112957. [Google Scholar] [CrossRef]
- Adeyemi, O.; Grove, I.; Peets, S.; Norton, T. Advanced monitoring and management systems for improving sustainability in precision irrigation. Sustainability 2017, 9, 353. [Google Scholar] [CrossRef] [Green Version]
- Abioye, E.A.; Abidin, M.S.Z.; Mahmud, M.S.A.; Buyamin, S.; Ishak, M.H.I.; Abd Rahman, M.K.I.; Otuoze, A.O.; Onotu, P.; Ramli, M.S.A. A review on monitoring and advanced control strategies for precision irrigation. Comput. Electron. Agric. 2020, 173, 105441. [Google Scholar] [CrossRef]
- Vereecken, H.; Huisman, J.A.; Bogena, H.; Vanderborght, J.; Vrugt, J.A.; Hopmans, J.W. On the value of soil moisture measurements in vadose zone hydrology: A review. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef] [Green Version]
- Western, A.W.; Grayson, R.B.; Blöschl, G. Scaling of soil moisture: A hydrologic perspective. Annu. Rev. Earth Planet. Sci. 2002, 30, 149–180. [Google Scholar] [CrossRef] [Green Version]
- Sharma, P.K.; Kumar, D.; Srivastava, H.S.; Patel, P. Assessment of different methods for soil moisture estimation: A review. J. Remote Sens. GIS 2018, 9, 57–73. [Google Scholar]
- McCabe, M.F.; Rodell, M.; Alsdorf, D.E.; Miralles, D.G.; Uijlenhoet, R.; Wagner, W.; Lucieer, A.; Houborg, R.; Verhoest, N.E.C.; Franz, T.E. The future of Earth observation in hydrology. Hydrol. Earth Syst. Sci. 2017, 21, 3879–3914. [Google Scholar] [CrossRef] [Green Version]
- Entekhabi, D.; Njoku, E.G.; O’Neill, P.E.; Kellogg, K.H.; Crow, W.T.; Edelstein, W.N.; Entin, J.K.; Goodman, S.D.; Jackson, T.J.; Johnson, J. The soil moisture active passive (SMAP) mission. Proc. IEEE 2010, 98, 704–716. [Google Scholar] [CrossRef]
- Mengen, D.; Montzka, C.; Jagdhuber, T.; Fluhrer, A.; Brogi, C.; Baum, S.; Schüttemeyer, D.; Bayat, B.; Bogena, H.; Coccia, A. The SARSense campaign: Air-and space-borne C-and L-band SAR for the analysis of soil and plant parameters in agriculture. Remote Sens. 2021, 13, 825. [Google Scholar] [CrossRef]
- Bogena, H.R.; Herbst, M.; Huisman, J.A.; Rosenbaum, U.; Weuthen, A.; Vereecken, H. Potential of wireless sensor networks for measuring soil water content variability. Vadose Zone J. 2010, 9, 1002–1013. [Google Scholar] [CrossRef] [Green Version]
- Wagner, W.; Blöschl, G.; Pampaloni, P.; Calvet, J.-C.; Bizzarri, B.; Wigneron, J.-P.; Kerr, Y. Operational readiness of microwave remote sensing of soil moisture for hydrologic applications. Hydrol. Res. 2007, 38, 1–20. [Google Scholar] [CrossRef]
- Walker, J.P.; Houser, P.R.; Willgoose, G.R. Active microwave remote sensing for soil moisture measurement: A field evaluation using ERS-2. Hydrol. Process. 2004, 18, 1975–1997. [Google Scholar] [CrossRef]
- Jackson, R.B.; Mooney, H.A.; Schulze, E.-D. A global budget for fine root biomass, surface area, and nutrient contents. Proc. Natl. Acad. Sci. USA 1997, 94, 7362–7366. [Google Scholar] [CrossRef] [Green Version]
- Kim, S.-B.; Liao, T.-H. Robust retrieval of soil moisture at field scale across wide-ranging SAR incidence angles for soybean, wheat, forage, oat and grass. Remote Sens. Environ. 2021, 266, 112712. [Google Scholar] [CrossRef]
- Mohanty, B.P.; Cosh, M.H.; Lakshmi, V.; Montzka, C. Soil moisture remote sensing: State-of-the-science. Vadose Zone J. 2017, 16, 1–9. [Google Scholar] [CrossRef] [Green Version]
- Heistermann, M.; Francke, T.; Schrön, M.; Oswald, S.E. Spatio-temporal soil moisture retrieval at the catchment scale using a dense network of cosmic-ray neutron sensors. Hydrol. Earth Syst. Sci. 2021, 25, 4807–4824. [Google Scholar] [CrossRef]
- Zreda, M.; Shuttleworth, W.J.; Zeng, X.; Zweck, C.; Desilets, D.; Franz, T.; Rosolem, R. COSMOS: The cosmic-ray soil moisture observing system. Hydrol. Earth Syst. Sci. 2012, 16, 4079–4099. [Google Scholar] [CrossRef] [Green Version]
- Desilets, D.; Zreda, M.; Ferré, T.P.A. Nature’s neutron probe: Land surface hydrology at an elusive scale with cosmic rays. Water Resour. Res. 2010, 46. [Google Scholar] [CrossRef]
- Zreda, M.; Desilets, D.; Ferré, T.P.A.; Scott, R.L. Measuring soil moisture content non-invasively at intermediate spatial scale using cosmic-ray neutrons. Geophys. Res. Lett. 2008, 35. [Google Scholar] [CrossRef] [Green Version]
- Köhli, M.; Weimar, J.; Schrön, M.; Baatz, R.; Schmidt, U. Soil moisture and air humidity dependence of the above-ground cosmic-ray neutron intensity. Front. Water 2021, 2, 66. [Google Scholar] [CrossRef]
- Köhli, M.; Schrön, M.; Schmidt, U. Response functions for detectors in cosmic ray neutron sensing. Nucl. Instrum. Methods Phys. Res. Sect. A: Accel. Spectrometers Detect. Assoc. Equip. 2018, 902, 184–189. [Google Scholar] [CrossRef] [Green Version]
- Weimar, J.; Köhli, M.; Budach, C.; Schmidt, U. Large-Scale Boron-Lined Neutron Detection Systems as a 3He Alternative for Cosmic Ray Neutron Sensing. Front. Water 2020, 2, 16. [Google Scholar] [CrossRef]
- Franz, T.E.; Wang, T.; Avery, W.; Finkenbiner, C.; Brocca, L. Combined analysis of soil moisture measurements from roving and fixed cosmic ray neutron probes for multiscale real-time monitoring. Geophys. Res. Lett. 2015, 42, 3389–3396. [Google Scholar] [CrossRef] [Green Version]
- Andreasen, M.; Jensen, K.H.; Desilets, D.; Franz, T.E.; Zreda, M.; Bogena, H.R.; Looms, M.C. Status and perspectives on the cosmic-ray neutron method for soil moisture estimation and other environmental science applications. Vadose Zone J. 2017, 16, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Köhli, M.; Schrön, M.; Zreda, M.; Schmidt, U.; Dietrich, P.; Zacharias, S. Footprint characteristics revised for field-scale soil moisture monitoring with cosmic-ray neutrons. Water Resour. Res. 2015, 51, 5772–5790. [Google Scholar] [CrossRef] [Green Version]
- Schrön, M.; Köhli, M.; Scheiffele, L.; Iwema, J.; Bogena, H.R.; Lv, L.; Martini, E.; Baroni, G.; Rosolem, R.; Weimar, J. Improving calibration and validation of cosmic-ray neutron sensors in the light of spatial sensitivity. Hydrol. Earth Syst. Sci. 2017, 21, 5009–5030. [Google Scholar] [CrossRef] [Green Version]
- Brogi, C.; Bogena, H.R.; Köhli, M.; Huisman, J.A.; Hendricks Franssen, H.-J.; Dombrowski, O. Feasibility of irrigation monitoring with cosmic-ray neutron sensors. Geosci. Instrum. Method. Data Syst. 2022, 11, 451–469. [Google Scholar] [CrossRef]
- Schrön, M.; Zacharias, S.; Womack, G.; Köhli, M.; Desilets, D.; Oswald, S.E.; Bumberger, J.; Mollenhauer, H.; Kögler, S.; Remmler, P. Intercomparison of cosmic-ray neutron sensors and water balance monitoring in an urban environment. Geosci. Instrum. Methods Data Syst. 2018, 7, 83–99. [Google Scholar] [CrossRef] [Green Version]
- Finkenbiner, C.E.; Franz, T.E.; Gibson, J.; Heeren, D.M.; Luck, J. Integration of hydrogeophysical datasets and empirical orthogonal functions for improved irrigation water management. Precis. Agric. 2019, 20, 78–100. [Google Scholar] [CrossRef] [Green Version]
- Franz, T.E.; Wahbi, A.; Vreugdenhil, M.; Weltin, G.; Heng, L.; Oismueller, M.; Strauss, P.; Dercon, G.; Desilets, D. Using cosmic-ray neutron probes to monitor landscape scale soil water content in mixed land use agricultural systems. Appl. Environ. Soil Sci. 2016, 2016, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Bogena, H.R.; Huisman, J.A.; Baatz, R.; Hendricks Franssen, H.-J.; Vereecken, H. Accuracy of the cosmic-ray soil water content probe in humid forest ecosystems: The worst case scenario. Water Resour. Res. 2013, 49, 5778–5791. [Google Scholar] [CrossRef] [Green Version]
- Schattan, P.; Baroni, G.; Oswald, S.E.; Schöber, J.; Fey, C.; Kormann, C.; Huttenlau, M.; Achleitner, S. Continuous monitoring of snowpack dynamics in alpine terrain by aboveground neutron sensing. Water Resour. Res. 2017, 53, 3615–3634. [Google Scholar] [CrossRef]
- Bogena, H.R.; Herrmann, F.; Jakobi, J.; Brogi, C.; Ilias, A.; Huisman, J.A.; Panagopoulos, A.; Pisinaras, V. Monitoring of snowpack dynamics with cosmic-ray neutron probes: A comparison of four conversion methods. Front. Water 2020, 2, 19. [Google Scholar] [CrossRef]
- Schattan, P.; Köhli, M.; Schrön, M.; Baroni, G.; Oswald, S.E. Sensing area-average snow water equivalent with cosmic-ray neutrons: The influence of fractional snow cover. Water Resour. Res. 2019, 55, 10796–10812. [Google Scholar] [CrossRef] [Green Version]
- Schattan, P.; Schwaizer, G.; Schöber, J.; Achleitner, S. The complementary value of cosmic-ray neutron sensing and snow covered area products for snow hydrological modelling. Remote Sens. Environ. 2020, 239, 111603. [Google Scholar] [CrossRef]
- Franz, T.E.; Zreda, M.; Rosolem, R.; Hornbuckle, B.K.; Irvin, S.L.; Adams, H.; Kolb, T.E.; Zweck, C.; Shuttleworth, W.J. Ecosystem-scale measurements of biomass water using cosmic ray neutrons. Geophys. Res. Lett. 2013, 40, 3929–3933. [Google Scholar] [CrossRef]
- Baatz, R.; Bogena, H.R.; Hendricks Franssen, H.-J.; Huisman, J.A.; Montzka, C.; Vereecken, H. An empirical vegetation correction for soil water content quantification using cosmic ray probes. Water Resour. Res. 2015, 51, 2030–2046. [Google Scholar] [CrossRef] [Green Version]
- Rosolem, R.; Shuttleworth, W.J.; Zreda, M.; Franz, T.E.; Zeng, X.; Kurc, S.A. The effect of atmospheric water vapor on neutron count in the cosmic-ray soil moisture observing system. J. Hydrometeorol. 2013, 14, 1659–1671. [Google Scholar] [CrossRef] [Green Version]
- Rasche, D.; Köhli, M.; Schrön, M.; Blume, T.; Güntner, A. Towards disentangling heterogeneous soil moisture patterns in cosmic-ray neutron sensor footprints. Hydrol. Earth Syst. Sci. 2021, 25, 6547–6566. [Google Scholar] [CrossRef]
- Franz, T.E.; Zreda, M.; Rosolem, R.; Ferre, T.P.A. Field validation of a cosmic-ray neutron sensor using a distributed sensor network. Vadose Zone J. 2012, 11, vzj2012.0046. [Google Scholar] [CrossRef] [Green Version]
- Schrön, M.; Köhli, M.; Zacharias, S. Signal contribution of distant areas to cosmic-ray neutron sensors—Implications on footprint and sensitivity. EGUsphere 2022, 2022, 1–25. [Google Scholar] [CrossRef]
- Babaeian, E.; Sadeghi, M.; Franz, T.E.; Jones, S.; Tuller, M. Mapping soil moisture with the OPtical TRApezoid Model (OPTRAM) based on long-term MODIS observations. Remote Sens. Environ. 2018, 211, 425–440. [Google Scholar] [CrossRef]
- Montzka, C.; Bogena, H.R.; Zreda, M.; Monerris, A.; Morrison, R.; Muddu, S.; Vereecken, H. Validation of spaceborne and modelled surface soil moisture products with cosmic-ray neutron probes. Remote Sens. 2017, 9, 103. [Google Scholar] [CrossRef] [Green Version]
- Shuttleworth, J.; Rosolem, R.; Zreda, M.; Franz, T. The COsmic-ray Soil Moisture Interaction Code (COSMIC) for use in data assimilation. Hydrol. Earth Syst. Sci. 2013, 17, 3205–3217. [Google Scholar] [CrossRef] [Green Version]
- Baatz, R.; Hendricks Franssen, H.-J.; Han, X.; Hoar, T.; Bogena, H.R.; Vereecken, H. Evaluating the value of a network of cosmic-ray probes for improving land surface modeling. Hydrol. Earth Syst. Sci 2017, 21, 2509–2530. [Google Scholar] [CrossRef] [Green Version]
- Rosolem, R.; Hoar, T.; Arellano, A.; Anderson, J.L.; Shuttleworth, W.J.; Zeng, X.; Franz, T.E. Translating aboveground cosmic-ray neutron intensity to high-frequency soil moisture profiles at sub-kilometer scale. Hydrol. Earth Syst. Sci. 2014, 18, 4363–4379. [Google Scholar] [CrossRef] [Green Version]
- Jakobi, J.; Huisman, J.A.; Fuchs, H.; Vereecken, H.; Bogena, H.R. Potential of thermal neutrons to correct cosmic-ray neutron soil moisture content measurements for dynamic biomass effects. Water Resour. Res. 2022, 58, e2022WR031972. [Google Scholar] [CrossRef]
- McJannet, D.; Hawdon, A.; Baker, B.; Renzullo, L.; Searle, R. Multiscale soil moisture estimates using static and roving cosmic-ray soil moisture sensors. Hydrol. Earth Syst. Sci. 2017, 21, 6049–6067. [Google Scholar] [CrossRef] [Green Version]
- Dong, J.; Ochsner, T.E. Soil texture often exerts a stronger influence than precipitation on mesoscale soil moisture patterns. Water Resour. Res. 2018, 54, 2199–2211. [Google Scholar] [CrossRef]
- Jakobi, J.; Huisman, J.H.; Schrön, M.; Fiedler, J.; Brogi, C.; Vereecken, H.; Bogena, H.R. Error estimation for soil moisture measurements with cosmic-ray neutron sensing and implications for rover surveys. Front. Water 2020, 2, 10. [Google Scholar] [CrossRef]
- Franz, T.E.; Wahbi, A.; Zhang, J.; Vreugdenhil, M.; Heng, L.; Dercon, G.; Strauss, P.; Brocca, L.; Wagner, W. Practical data products from cosmic-ray neutron sensing for hydrological applications. Front. Water 2020, 2, 9. [Google Scholar] [CrossRef] [Green Version]
- Ragab, R.; Evans, J.G.; Battilani, A.; Solimando, D. The cosmic-ray soil moisture observation system (Cosmos) for estimating the crop water requirement: New approach. Irrig. Drain. 2017, 66, 456–468. [Google Scholar] [CrossRef] [Green Version]
- Chen, X.; Song, W.; Shi, Y.; Liu, W.; Lu, Y.; Pang, Z.; Chen, X. Application of Cosmic-Ray Neutron Sensor Method to Calculate Field Water Use Efficiency. Water 2022, 14, 1518. [Google Scholar] [CrossRef]
- Zhu, Z.; Tan, L.; Gao, S.; Jiao, Q. Observation on soil moisture of irrigation cropland by cosmic-ray probe. IEEE Geosci. Remote Sens. Lett. 2014, 12, 472–476. [Google Scholar] [CrossRef]
- Baroni, G.; Scheiffele, L.M.; Schrön, M.; Ingwersen, J.; Oswald, S.E. Uncertainty, sensitivity and improvements in soil moisture estimation with cosmic-ray neutron sensing. J. Hydrol. 2018, 564, 873–887. [Google Scholar] [CrossRef]
- Han, X.; Hendricks-Franssen, H.-J.; Bello, M.Á.J.; Rosolem, R.; Bogena, H.R.; Alzamora, F.M.; Chanzy, A.; Vereecken, H. Simultaneous soil moisture and properties estimation for a drip irrigated field by assimilating cosmic-ray neutron intensity. J. Hydrol. 2016, 539, 611–624. [Google Scholar] [CrossRef]
- Li, D.; Schrön, M.; Kohli, M.; Bogena, H.R.; Weimar, J.; Jiménez Bello, M.A.; Han, X.; Martínez-Gimeno, M.A.; Zacharias, S.; Vereecken, H.; et al. Can drip irrigation be scheduled with cosmic-ray neutron sensing? Vadose Zone J. 2019, 18, 1–13. [Google Scholar] [CrossRef]
- Davies, P.; Baatz, R.; Bogena, H.R.; Quansah, E.; Amekudzi, L.K. Optimal Temporal Filtering of the Cosmic-Ray Neutron Signal to Reduce Soil Moisture Uncertainty. Sensors 2022, 22, 9143. [Google Scholar] [CrossRef]
- Pisinaras, V.; Panagopoulos, A.; Herrmann, F.; Bogena, H.R.; Doulgeris, C.; Ilias, A.; Tziritis, E.; Wendland, F. Hydrologic and geochemical research at Pinios Hydrologic Observatory: Initial results. Vadose Zone J. 2018, 17, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Panagopoulos, A.; Herrmann, F.; Pisinaras, V.; Wendland, F. Impact of climate change on irrigation need and groundwater resources in pinios basin. Proceedings 2018, 2, 659. [Google Scholar]
- Bouyoucos, G.J. Directions for making mechanical analyses of soils by the hydrometer method. Soil Sci. 1936, 42, 225–230. [Google Scholar] [CrossRef]
- Bouyoucos, G.J. Hydrometer method improved for making particle size analyses of soils 1. Agron. J. 1962, 54, 464–465. [Google Scholar] [CrossRef]
- Nelson, D.W.; Sommers, L.E. A rapid and accurate procedure for estimation of organic carbon in soils. Proc. Indiana Acad. Sci. 1974, 84, 456–462. [Google Scholar]
- Brakensiek, D.L.; Rawls, W.J. Soil containing rock fragments: Effects on infiltration. Catena 1994, 23, 99–110. [Google Scholar] [CrossRef]
- Rawls, W.J.; Brakensiek, D.L. Prediction of soil water properties for hydrologic modeling. In Watershed Management in the Eighties; Amer Society of Civil Engineers: Reston, Virginia, 1985; pp. 293–299. [Google Scholar]
- Van Genuchten, M.T. A closed-form equation for predicting the hydraulic conductivity of unsaturated soils. Soil Sci. Soc. Am. J. 1980, 44, 892–898. [Google Scholar] [CrossRef] [Green Version]
- ESRI. DIgitalGlobe, GeoEye, Earthstar Geographics, CNES/Airbus DS, USDA, AEX, Getmapping, Aerogrid, IGN, IGP, Swisstopo, and the GIS User Comunity; ESRI Press, Inc.: Redlands, CA, USA, 2022. [Google Scholar]
- Bogena, H.R.; Huisman, J.A.; Schilling, B.; Weuthen, A.; Vereecken, H. Effective calibration of low-cost soil water content sensors. Sensors 2017, 17, 208. [Google Scholar] [CrossRef] [Green Version]
- Ney, P.; Köhli, M.; Bogena, H.; Goergen, K. CRNS-based monitoring technologies for a weather and climate-resilient agriculture: Realization by the ADAPTER project. In Proceedings of the 2021 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Trento-Bolzano, Italy, 3–5 November 2021; pp. 203–208. [Google Scholar]
- Köhli, M.; Schrön, M.; Zacharias, S.; Schmidt, U. URANOS v1. 0—The Ultra Rapid Adaptable Neutron-Only Simulation for Environmental Research. Geosci. Model Dev. Discuss. 2022, 2022, 1–48. [Google Scholar] [CrossRef]
- Sato, T. Analytical model for estimating terrestrial cosmic ray fluxes nearly anytime and anywhere in the world: Extension of PARMA/EXPACS. PLoS ONE 2015, 10, e0144679. [Google Scholar] [CrossRef] [Green Version]
- Jakobi, J.; Huisman, J.A.; Köhli, M.; Rasche, D.; Vereecken, H.; Bogena, H.R. The footprint characteristics of cosmic ray thermal neutrons. Geophys. Res. Lett. 2021, 48, e2021GL094281. [Google Scholar] [CrossRef]
- Bogena, H.; Schrön, M.; Jakobi, J.; Ney, P.; Zacharias, S.; Andreasen, M.; Baatz, R.; Boorman, D.; Duygu, B.; Eguibar-Galán, M. COSMOS-Europe: A European Network of Cosmic-Ray Neutron Soil Moisture Sensors. Earth Syst. Sci. Data Discuss. 2022, 14, 1125–1151. [Google Scholar] [CrossRef]
- Desilets, D.; Zreda, M. Spatial and temporal distribution of secondary cosmic-ray nucleon intensities and applications to in situ cosmogenic dating. Earth Planet. Sci. Lett. 2003, 206, 21–42. [Google Scholar] [CrossRef]
- Schrön, M.; Zacharias, S.; Köhli, M.; Weimar, J.; Dietrich, P. Monitoring environmental water with ground albedo neutrons and correction for incoming cosmic rays with neutron monitor data. In Proceedings of the 34th International Cosmic-Ray Conference (ICRC 2015), The Hague, The Netherlands, 30 July–6 August 2015. [Google Scholar]
- Hawdon, A.; McJannet, D.; Wallace, J. Calibration and correction procedures for cosmic-ray neutron soil moisture probes located across Australia. Water Resour. Res. 2014, 50, 5029–5043. [Google Scholar] [CrossRef]
- Zanotelli, D.; Montagnani, L.; Manca, G.; Tagliavini, M. Net primary productivity, allocation pattern and carbon use efficiency in an apple orchard assessed by integrating eddy covariance, biometric and continuous soil chamber measurements. Biogeosciences 2013, 10, 3089–3108. [Google Scholar] [CrossRef] [Green Version]
- Dombrowski, O.; Hendricks Franssen, H.-J.; Brogi, C.; Bogena, H.R. Performance of the ATMOS41 All-in-one weather station for weather monitoring. Sensors 2021, 21, 741. [Google Scholar] [CrossRef]
- Filippucci, P.; Tarpanelli, A.; Massari, C.; Serafini, A.; Strati, V.; Alberi, M.; Raptis, K.G.C.; Mantovani, F.; Brocca, L. Soil moisture as a potential variable for tracking and quantifying irrigation: A case study with proximal gamma-ray spectroscopy data. Adv. Water Resour. 2020, 136, 103502. [Google Scholar] [CrossRef]
- Flint, A.L.; Childs, S. Physical Properties of Rock Fragments and Their Effect on Available Water in Skeletal Soils 1. In Erosion and Productivity of Soils Containing Rock Fragments; Amer Society of Agronomy: Madison, WI, USA, 1984; pp. 91–103. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulated Scenario SM (in–out) | ||
|---|---|---|
| dry–dry | ||
| dry–wet | ||
| wet–dry | ||
| wet–wet |
| Field | Scenario (in–out) | (cm3 cm−3) | (cm3 cm−3) | (%) | (%) | (%) |
|---|---|---|---|---|---|---|
| S09 | dry–dry | 0.098 | 0.070 | 46.5 | 38.9 | 14.6 |
| dry–wet | 0.098 | 0.200 | 54.1 | 29.1 | 16.8 | |
| wet–dry | 0.275 | 0.070 | 39.7 | 42.8 | 17.6 | |
| wet–wet | 0.275 | 0.200 | 47.0 | 32.1 | 20.9 | |
| S10 | dry–dry | 0.105 | 0.070 | 45.5 | 39.8 | 14.7 |
| dry–wet | 0.105 | 0.200 | 53.0 | 29.8 | 17.2 | |
| wet–dry | 0.212 | 0.070 | 40.9 | 42.5 | 16.6 | |
| wet–wet | 0.212 | 0.200 | 47.8 | 32.4 | 19.8 |
| Field | Scenario (in-out) | (cm3 cm−3) for 30–60–160 cm Depth | (cm3 cm−3) for 30–60–160 cm Depth | (%) | (%) | (%) |
|---|---|---|---|---|---|---|
| S09 | dry-dry | 0.098–0.093–0.093 | 0.070–0.080–0.080 1 | 51.1 | 34.3 | 14.6 |
| dry-wet | 0.098–0.093–0.093 | 0.200–0.100–0.100 1 | 57.3 | 26.7 | 16.0 | |
| wet-dry | 0.275–0.245–0.221 | 0.070–0.080–0.080 1 | 45.6 | 36.6 | 17.8 | |
| wet-wet | 0.275–0.245–0.221 | 0.200–0.100–0.100 1 | 50.4 | 30.0 | 19.6 | |
| S10 | dry-dry | 0.105–0.114–0.114 | 0.070–0.080–0.080 1 | 50.6 | 34.5 | 14.9 |
| dry-wet | 0.105–0.114–0.114 | 0.200–0.100–0.100 1 | 56.6 | 26.9 | 16.5 | |
| wet-dry | 0.212–0.214–0.191 | 0.070–0.080–0.080 1 | 46.7 | 36.8 | 16.5 | |
| wet-wet | 0.212–0.214–0.191 | 0.200–0.100–0.100 1 | 51.5 | 30.2 | 18.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Brogi, C.; Pisinaras, V.; Köhli, M.; Dombrowski, O.; Hendricks Franssen, H.-J.; Babakos, K.; Chatzi, A.; Panagopoulos, A.; Bogena, H.R. Monitoring Irrigation in Small Orchards with Cosmic-Ray Neutron Sensors. Sensors 2023, 23, 2378. https://doi.org/10.3390/s23052378
Brogi C, Pisinaras V, Köhli M, Dombrowski O, Hendricks Franssen H-J, Babakos K, Chatzi A, Panagopoulos A, Bogena HR. Monitoring Irrigation in Small Orchards with Cosmic-Ray Neutron Sensors. Sensors. 2023; 23(5):2378. https://doi.org/10.3390/s23052378
Chicago/Turabian StyleBrogi, Cosimo, Vassilios Pisinaras, Markus Köhli, Olga Dombrowski, Harrie-Jan Hendricks Franssen, Konstantinos Babakos, Anna Chatzi, Andreas Panagopoulos, and Heye Reemt Bogena. 2023. "Monitoring Irrigation in Small Orchards with Cosmic-Ray Neutron Sensors" Sensors 23, no. 5: 2378. https://doi.org/10.3390/s23052378
APA StyleBrogi, C., Pisinaras, V., Köhli, M., Dombrowski, O., Hendricks Franssen, H.-J., Babakos, K., Chatzi, A., Panagopoulos, A., & Bogena, H. R. (2023). Monitoring Irrigation in Small Orchards with Cosmic-Ray Neutron Sensors. Sensors, 23(5), 2378. https://doi.org/10.3390/s23052378