
Development and Evaluation of a Full-Waveform Resistance Training Monitoring System Based on a Linear Position Transducer
 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Full-Waveform Resistance Training Monitoring System
- Measuring the displacement and velocity of the barbell during resistance training;
- Recording the training full-waveform data to quantify the training process and calculate the result variables to evaluate athletes’ performance;
- Providing real-time feedback on training parameters to coaches and athletes to help optimize the training process.
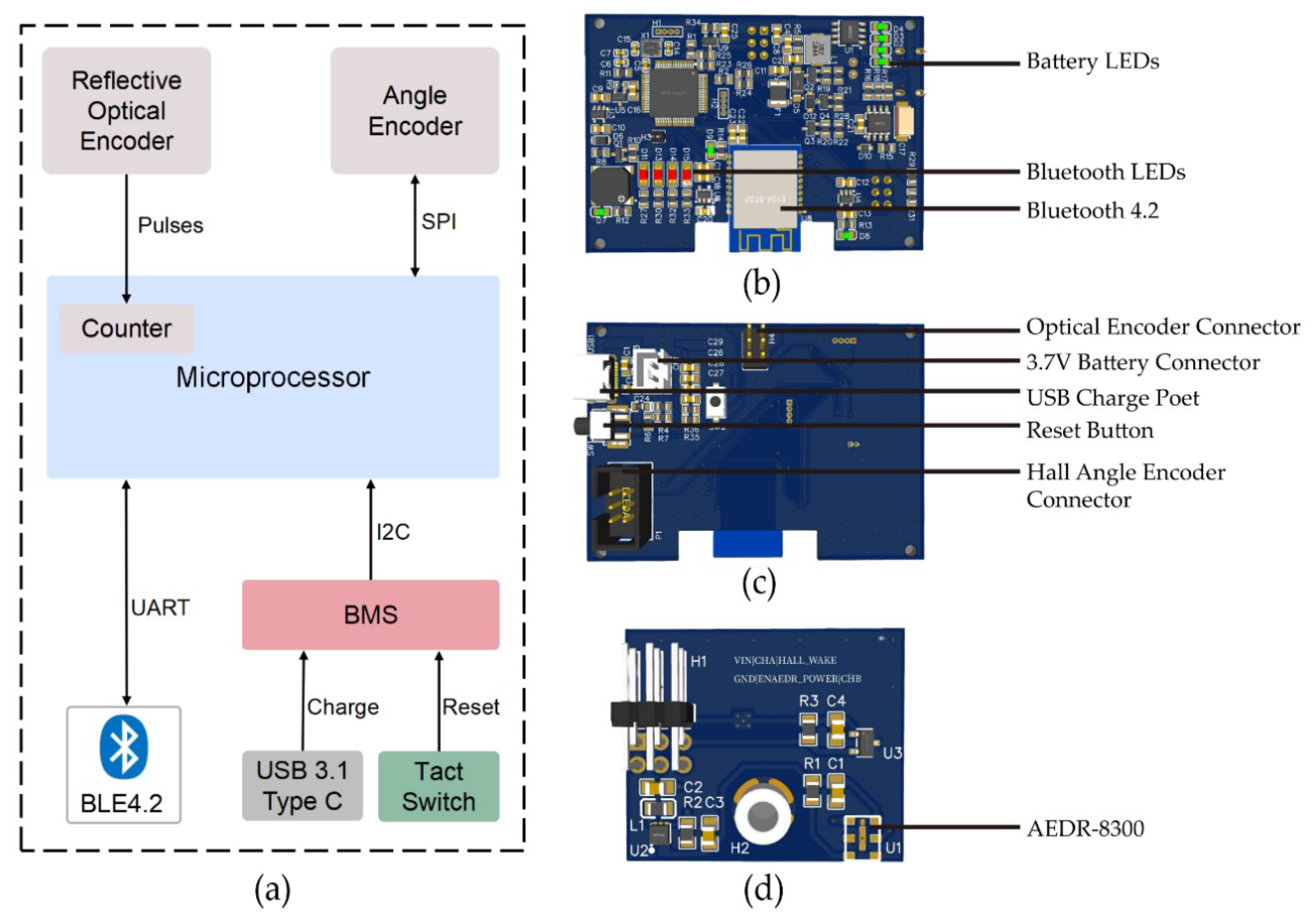
2.1.1. Data Acquisition Device
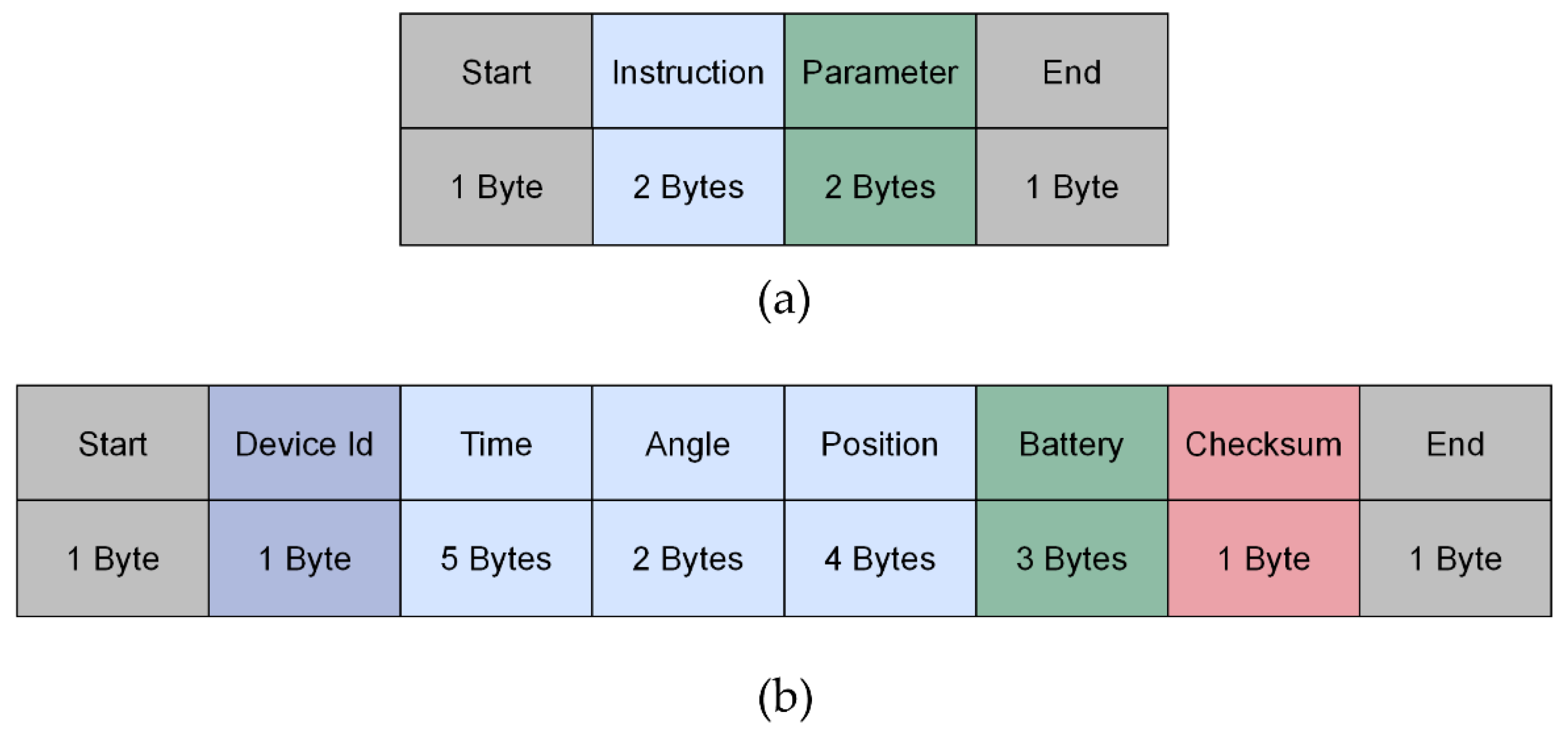
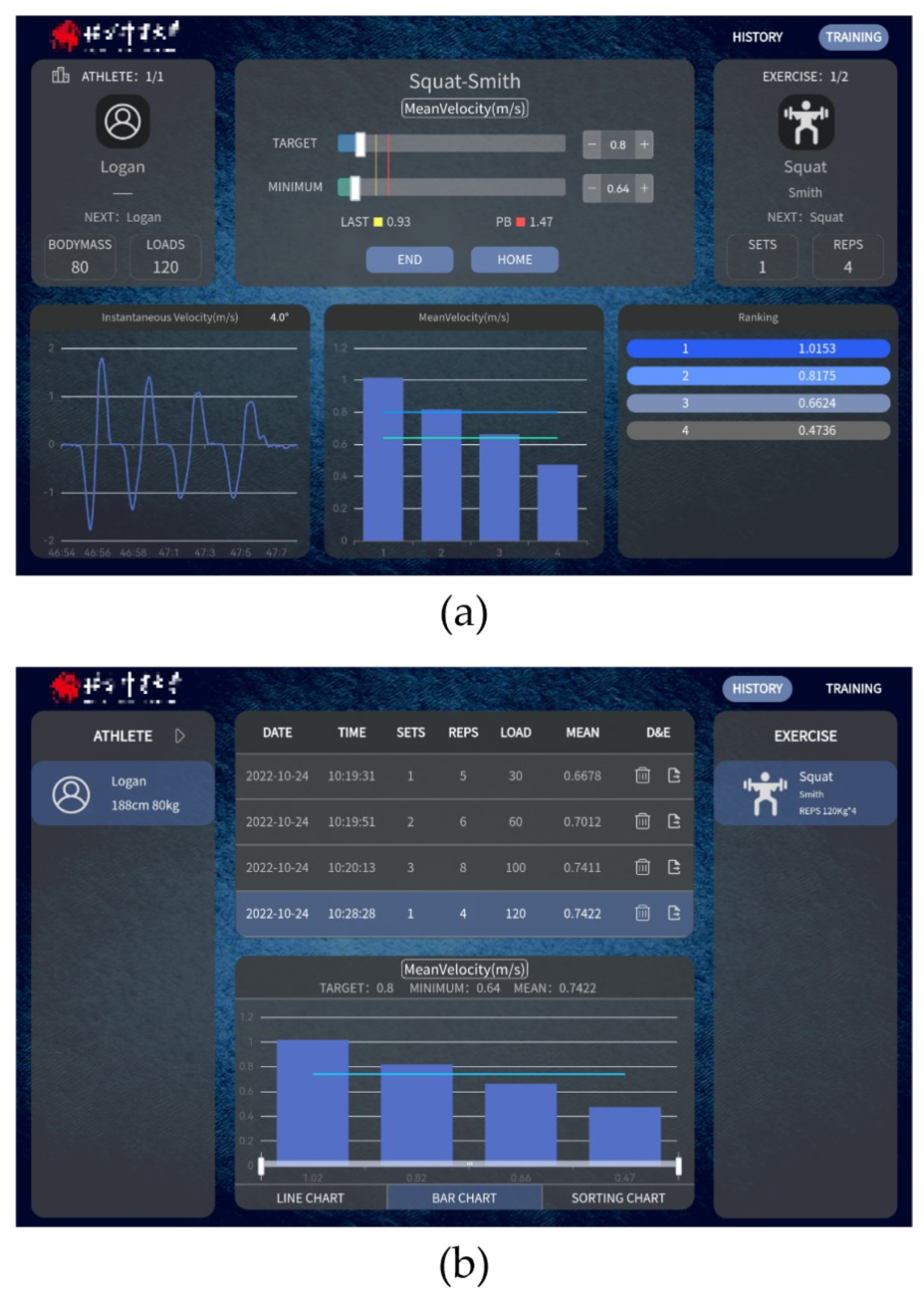
2.1.2. Software Platform
- Position (m) refers to the difference between the zero point and the current position (or the depth, if the device is fixed above).
- Mean Velocity (m/s) and Max Velocity (m/s) refer to the average and maximum values of instantaneous velocity in the concentric phase of a movement.
- Mean Power (W) and Max Power (W) refer to the average and maximum values of instantaneous power in the concentric phase of a movement. The first derivative of velocity is used to obtain acceleration, the mass of the training load, and body mass, and is combined with the choice of movement (since, because of the center of gravity, the value of work done by self-weight varies among different exercises).
- Instantaneous power P applied to the system is calculated above, where M1 is the body mass of the users, M2 is the mass of the training load, g is the acceleration of gravity, a is the acceleration of the barbell, and V is the velocity of the barbell.
- Relative Mean Power (W/kg) and Relative Max Power (W/kg) refer to the average and maximum values of instantaneous power in the concentric phase of the movement, divided by the users’ body mass.
2.2. Validity of the Full-Waveform Resistance Training Monitoring System
2.2.1. Subjects
2.2.2. Equipment Setup
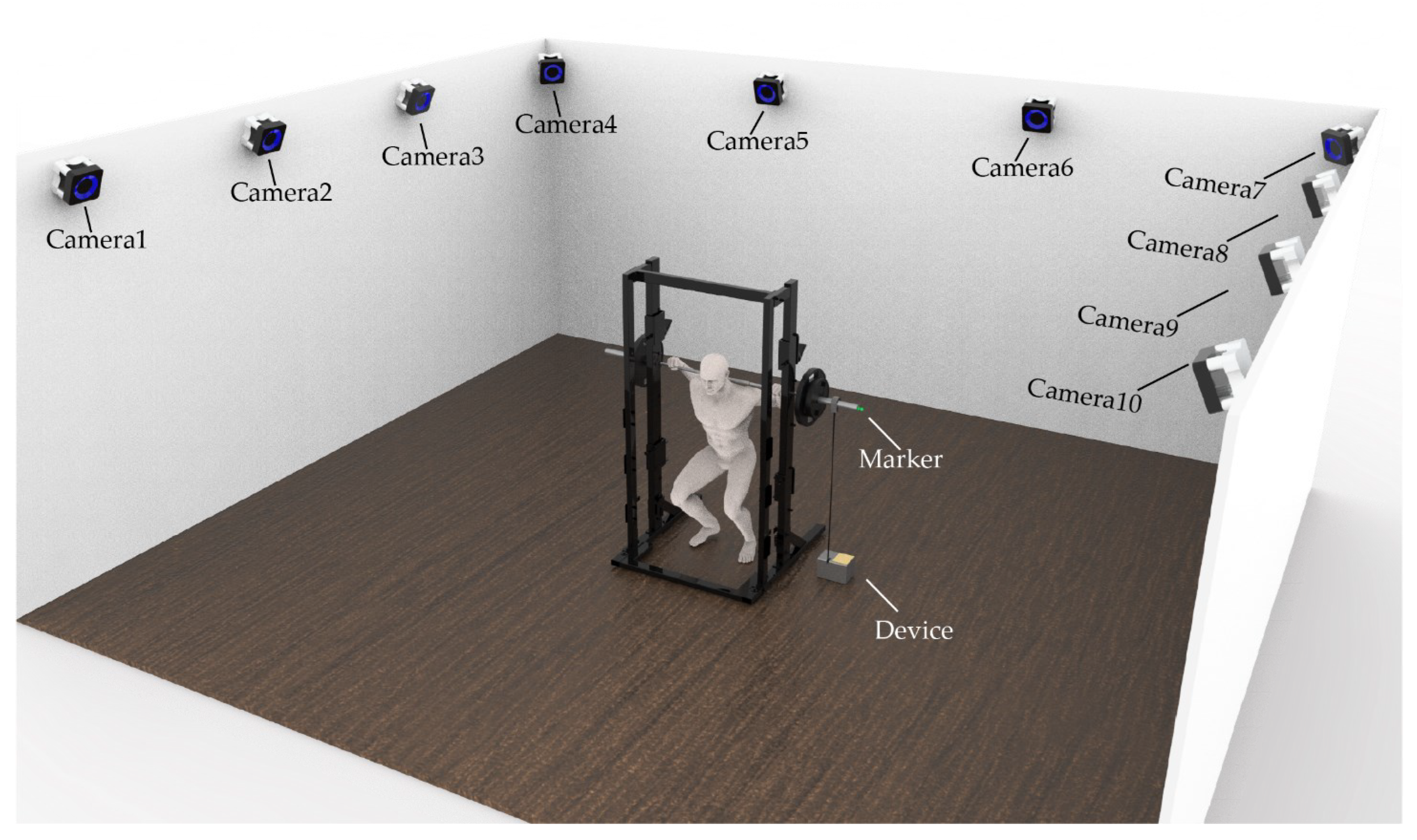
- The OptiTrack system is a 10-camera 3D motion capture system employed as the “gold standard” reference system. Before the test, the entire calibration of the equipment was completed in accordance with the OptiTrack user guide. Cameras also tracked the marker (14 mm in diameter) placed at the end of the barbell, allowing bar movement to be measured (Figure 6).
- The FRTMS is a training monitoring system in which the data acquisition device is attached to the Smith machine’s side and the tether is bound to the rack’s barbell. Before each squat, the tether was checked by the researcher to ensure its perpendicularity (Figure 6).
2.2.3. Experimental Procedure
2.2.4. Data Processing and Analysis
2.2.5. Statistical Analysis
3. Results
4. Discussion
- Preventing sports injury: the participants avoided attempting heavier loads when their MCV was below the squat minimum velocity threshold (0.3 m/s) [55].
- Monitoring movement quality: the FRTMS also monitored the depth of each squat, ensuring that all repetitions were performed at a qualified depth.
- Providing velocity feedback: Real-time velocity feedback improved the participants’ training motivation and assisted the coach with performing the intervention.
- Adjusting training load: if today’s reference velocity (the MCV of the first squat during 80% of 1RM) was 0.06 m/s lower or higher than the corresponding velocity at the 1RM test, the training load needs to be adjusted by ±5% of the tested 1RM [12].
- Monitoring the enhancement of movement: by comparing the duration of the sticking region and the depth of squats before and after the intervention, the full-waveform velocity can indicate the enhancement of the squat action.
- Monitoring the detailed improvement of the training performance: comparing the change in the maximal concentric velocity (MCV) and the time to peak velocity during the intervention can reflect detailed improvement of the training performance. For example, after a training intervention, the 1RM value of the athletes did not change. However, their time to peak velocity and the duration of the sticking region each decreased by 50 milliseconds, which for athletes could be of major benefit to the explosive power of the lower limbs [42].
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Scott, B.R.; Duthie, G.M.; Thornton, H.R.; Dascombe, B.J. Training monitoring for resistance exercise: Theory and applications. Sport. Med. 2016, 46, 687–698. [Google Scholar] [CrossRef]
- Foster, C.; Rodriguez-Marroyo, J.A.; De Koning, J.J. Monitoring training loads: The past, the present, and the future. Int. J. Sport. Physiol. Perform. 2017, 12, S2-2–S2-8. [Google Scholar] [CrossRef] [Green Version]
- Fry, A.C. The role of resistance exercise intensity on muscle fibre adaptations. Sport. Med. 2004, 34, 663–679. [Google Scholar] [CrossRef]
- Kraemer, W.J.; Ratamess, N.A. Fundamentals of resistance training: Progression and exercise prescription. Med. Sci. Sport. Exerc. 2004, 36, 674–688. [Google Scholar] [CrossRef]
- Spiering, B.A.; Kraemer, W.J.; Anderson, J.M.; Armstrong, L.E.; Nindl, B.C.; Volek, J.S.; Maresh, C.M. Resistance exercise biology. Sport. Med. 2008, 38, 527–540. [Google Scholar] [CrossRef]
- Weakley, J.; Mann, B.; Banyard, H.; McLaren, S.; Scott, T.; Garcia-Ramos, A. Velocity-based training: From theory to application. Strength Cond. J. 2021, 43, 31–49. [Google Scholar] [CrossRef]
- González-Badillo, J.J.; Sánchez-Medina, L. Movement velocity as a measure of loading intensity in resistance training. Int. J. Sport. Med. 2010, 31, 347–352. [Google Scholar] [CrossRef] [PubMed]
- Pereira, M.I.; Gomes, P.S. Movement velocity in resistance training. Sport. Med. 2003, 33, 427–438. [Google Scholar] [CrossRef] [PubMed]
- Hecksteden, A.; Pitsch, W.; Rosenberger, F.; Meyer, T. Repeated testing for the assessment of individual response to exercise training. J. Appl. Physiol. 2018, 124, 1567–1579. [Google Scholar] [CrossRef] [PubMed]
- Balsalobre-Fernández, C.; García-Ramos, A.; Jiménez-Reyes, P. Load–velocity profiling in the military press exercise: Effects of gender and training. Int. J. Sport. Sci. Coach. 2018, 13, 743–750. [Google Scholar] [CrossRef]
- González-Badillo, J.J.; Yañez-García, J.M.; Mora-Custodio, R.; Rodríguez-Rosell, D. Velocity loss as a variable for monitoring resistance exercise. Int. J. Sport. Med. 2017, 38, 217–225. [Google Scholar] [CrossRef] [PubMed]
- Weakley, J.; Ramirez-Lopez, C.; McLaren, S.; Dalton-Barron, N.; Weaving, D.; Jones, B.; Till, K.; Banyard, H. The effects of 10%, 20%, and 30% velocity loss thresholds on kinetic, kinematic, and repetition characteristics during the barbell back squat. Int. J. Sport. Physiol. Perform. 2020, 15, 180–188. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weakley, J.; Wilson, K.; Till, K.; Banyard, H.; Dyson, J.; Phibbs, P.; Read, D.; Jones, B. Show me, tell me, encourage me: The effect of different forms of feedback on resistance training performance. J. Strength Cond. Res. 2020, 34, 3157–3163. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Weakley, J.; Wilson, K.; Till, K.; Read, D.; Scantlebury, S.; Sawczuk, T.; Neenan, C.; Jones, B. Visual kinematic feedback enhances velocity, power, motivation and competitiveness in adolescent female athletes. J. Aust. Strength Cond. 2019, 27, 16–22. [Google Scholar]
- Weakley, J.J.; Wilson, K.M.; Till, K.; Read, D.B.; Darrall-Jones, J.; Roe, G.A.; Phibbs, P.J.; Jones, B. Visual feedback attenuates mean concentric barbell velocity loss and improves motivation, competitiveness, and perceived workload in male adolescent athletes. J. Strength Cond. Res. 2019, 33, 2420–2425. [Google Scholar] [CrossRef] [PubMed]
- Wilson, K.M.; de Joux, N.R.; Head, J.R.; Helton, W.S.; Dang, J.S.; Weakley, J.J. Presenting objective visual performance feedback over multiple sets of resistance exercise improves motivation, competitiveness, and performance. In Proceedings of the Human Factors and Ergonomics Society Annual Meeting, Philadelphia, PA, USA, 1–5 October 2018; pp. 1306–1310. [Google Scholar]
- Martínez-Cava, A.; Morán-Navarro, R.; Sánchez-Medina, L.; González-Badillo, J.J.; Pallarés, J.G. Velocity-and power-load relationships in the half, parallel and full back squat. J. Sport. Sci. 2019, 37, 1088–1096. [Google Scholar] [CrossRef]
- Sánchez-Medina, L.; González-Badillo, J.; Pérez, C.; Pallarés, J. Velocity-and power-load relationships of the bench pull vs. bench press exercises. Int. J. Sport. Med. 2014, 35, 209–216. [Google Scholar] [CrossRef]
- Sánchez-Medina, L.; Pallarés, J.G.; Pérez, C.E.; Morán-Navarro, R.; González-Badillo, J.J. Estimation of relative load from bar velocity in the full back squat exercise. Sport. Med. Int. Open 2017, 1, E80–E88. [Google Scholar] [CrossRef]
- Askow, A.T.; Stone, J.D.; Arndts, D.J.; King, A.C.; Goto, S.; Hannon, J.P.; Garrison, J.C.; Bothwell, J.M.; Esposito, P.E.; Jagim, A.R. Validity and reliability of a commercially-available velocity and power testing device. Sports 2018, 6, 170. [Google Scholar] [CrossRef] [Green Version]
- Lorenzetti, S.; Lamparter, T.; Lüthy, F. Validity and reliability of simple measurement device to assess the velocity of the barbell during squats. BMC Res. Notes 2017, 10, 707. [Google Scholar] [CrossRef] [Green Version]
- Giroux, C.; Rabita, G.; Chollet, D.; Guilhem, G. What is the best method for assessing lower limb force-velocity relationship? Int. J. Sport. Med. 2015, 36, 143–149. [Google Scholar] [CrossRef] [PubMed]
- Rahmani, A.; Viale, F.; Dalleau, G.; Lacour, J.-R. Force/velocity and power/velocity relationships in squat exercise. Eur. J. Appl. Physiol. 2001, 84, 227–232. [Google Scholar] [CrossRef]
- Clemente, F.M.; Akyildiz, Z.; Pino-Ortega, J.; Rico-González, M. Validity and reliability of the inertial measurement unit for barbell velocity assessments: A systematic review. Sensors 2021, 21, 2511. [Google Scholar] [CrossRef]
- Flores, F.J.; Sedano, S.; de Benito, A.M.; Redondo, J.C. Validity and reliability of a 3-axis accelerometer for measuring weightlifting movements. Int. J. Sport. Sci. Coach. 2016, 11, 872–879. [Google Scholar] [CrossRef]
- Drinkwater, E.J.; Galna, B.; McKenna, M.J.; Hunt, P.H.; Pyne, D.B. Validation of an optical encoder during free weight resistance movements and analysis of bench press sticking point power during fatigue. J. Strength Cond. Res. 2007, 21, 510–517. [Google Scholar] [CrossRef] [Green Version]
- Weakley, J.; Chalkley, D.; Johnston, R.; García-Ramos, A.; Townshend, A.; Dorrell, H.; Pearson, M.; Morrison, M.; Cole, M. Criterion validity, and interunit and between-day reliability of the FLEX for measuring barbell velocity during commonly used resistance training exercises. J. Strength Cond. Res. 2020, 34, 1519–1524. [Google Scholar] [CrossRef] [PubMed]
- Conceição, F.; Fernandes, J.; Lewis, M.; Gonzaléz-Badillo, J.J.; Jimenéz-Reyes, P. Movement velocity as a measure of exercise intensity in three lower limb exercises. J. Sport. Sci. 2016, 34, 1099–1106. [Google Scholar] [CrossRef] [Green Version]
- Banyard, H.G.; Nosaka, K.; Sato, K.; Haff, G.G. Validity of various methods for determining velocity, force, and power in the back squat. Int. J. Sport. Physiol. Perform. 2017, 12, 1170–1176. [Google Scholar] [CrossRef]
- García-Ramos, A.; Jaric, S.; Pérez-Castilla, A.; Padial, P.; Feriche, B. Reliability and magnitude of mechanical variables assessed from unconstrained and constrained loaded countermovement jumps. Sport. Biomech. 2017, 16, 514–526. [Google Scholar] [CrossRef]
- Pérez-Castilla, A.; Piepoli, A.; Delgado-García, G.; Garrido-Blanca, G.; García-Ramos, A. Reliability and concurrent validity of seven commercially available devices for the assessment of movement velocity at different intensities during the bench press. J. Strength Cond. Res. 2019, 33, 1258–1265. [Google Scholar] [CrossRef]
- Cronin, J.B.; Hing, R.D.; McNair, P.J. Reliability and validity of a linear position transducer for measuring jump performance. J. Strength Cond. Res. 2004, 18, 590–593. [Google Scholar] [CrossRef]
- Walsh, M.S.; Ford, K.R.; Bangen, K.J.; Myer, G.D.; Hewett, T.E. The validation of a portable force plate for measuring force-time data during jumping and landing tasks. J. Strength Cond. Res. 2006, 20, 730. [Google Scholar] [CrossRef] [PubMed]
- Balsalobre-Fernández, C.; Kuzdub, M.; Poveda-Ortiz, P.; Campo-Vecino, J.d. Validity and reliability of the push wearable device to measure movement velocity during the back squat exercise. J. Strength Cond. Res. 2016, 30, 1968–1974. [Google Scholar] [CrossRef]
- Balsalobre-Fernández, C.; Marchante, D.; Baz-Valle, E.; Alonso-Molero, I.; Jiménez, S.L.; Muñóz-López, M. Analysis of wearable and smartphone-based technologies for the measurement of barbell velocity in different resistance training exercises. Front. Physiol. 2017, 8, 649. [Google Scholar] [CrossRef] [Green Version]
- Orange, S.T.; Metcalfe, J.W.; Liefeith, A.; Marshall, P.; Madden, L.A.; Fewster, C.R.; Vince, R.V. Validity and reliability of a wearable inertial sensor to measure velocity and power in the back squat and bench press. J. Strength Cond. Res. 2019, 33, 2398–2408. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Courel-Ibáñez, J.; Martínez-Cava, A.; Morán-Navarro, R.; Escribano-Peñas, P.; Chavarren-Cabrero, J.; González-Badillo, J.J.; Pallarés, J.G. Reproducibility and repeatability of five different technologies for bar velocity measurement in resistance training. Ann. Biomed. Eng. 2019, 47, 1523–1538. [Google Scholar] [CrossRef]
- Chéry, C.; Ruf, L. Reliability of the load-velocity relationship and validity of the PUSH to measure velocity in the deadlift. J. Strength Cond. Res. 2019, 33, 2370–2380. [Google Scholar] [CrossRef] [PubMed]
- Fernandes, J.F.; Lamb, K.L.; Clark, C.C.; Moran, J.; Drury, B.; Garcia-Ramos, A.; Twist, C. Comparison of the FitroDyne and GymAware rotary encoders for quantifying peak and mean velocity during traditional multijointed exercises. J. Strength Cond. Res. 2021, 35, 1760–1765. [Google Scholar] [CrossRef]
- Thompson, S.W.; Rogerson, D.; Dorrell, H.F.; Ruddock, A.; Barnes, A. The reliability and validity of current technologies for measuring barbell velocity in the free-weight back squat and power clean. Sports 2020, 8, 94. [Google Scholar] [CrossRef]
- Moreno-Villanueva, A.; Pino-Ortega, J.; Rico-González, M. Validity and reliability of linear position transducers and linear velocity transducers: A systematic review. Sport. Biomech. 2021, 1–30. [Google Scholar] [CrossRef]
- Harris, N.K.; Cronin, J.; Taylor, K.-L.; Boris, J.; Sheppard, J. Understanding position transducer technology for strength and conditioning practitioners. Strength Cond. J. 2010, 32, 66–79. [Google Scholar] [CrossRef] [Green Version]
- Dickinson, M.H.; Farley, C.T.; Full, R.J.; Koehl, M.; Kram, R.; Lehman, S. How animals move: An integrative view. Science 2000, 288, 100–106. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cowell, J.F.; Cronin, J.; Brughelli, M. Eccentric muscle actions and how the strength and conditioning specialist might use them for a variety of purposes. Strength Cond. J. 2012, 34, 33–48. [Google Scholar] [CrossRef]
- Lindstedt, S.L.; LaStayo, P.; Reich, T. When active muscles lengthen: Properties and consequences of eccentric contractions. Physiology 2001, 16, 256–261. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Vogt, M.; Hoppeler, H.H. Eccentric exercise: Mechanisms and effects when used as training regime or training adjunct. J. Appl. Physiol. 2014, 116, 1446–1454. [Google Scholar] [CrossRef] [Green Version]
- LaStayo, P.C.; Woolf, J.M.; Lewek, M.D.; Snyder-Mackler, L.; Reich, T.; Lindstedt, S.L. Eccentric muscle contractions: Their contribution to injury, prevention, rehabilitation, and sport. J. Orthop. Sport. Phys. Ther. 2003, 33, 557–571. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Menrad, T.; Edelmann-Nusser, J. Validation of Velocity Measuring Devices in Velocity Based Strength Training. Int. J. Comput. Sci. Sport 2021, 20, 106–118. [Google Scholar] [CrossRef]
- Fritschi, R.; Seiler, J.; Gross, M. Validity and effects of placement of velocity-based training devices. Sports 2021, 9, 123. [Google Scholar] [CrossRef] [PubMed]
- Zink, A.J.; Whiting, W.C.; Vincent, W.J.; MCLAINE, A.J. The effects of a weight belt on trunk and leg muscle activity and joint kinematics during the squat exercise. J. Strength Cond. Res. 2001, 15, 235–240. [Google Scholar] [CrossRef]
- Koo, T.K.; Li, M.Y. A guideline of selecting and reporting intraclass correlation coefficients for reliability research. J. Chiropr. Med. 2016, 15, 155–163. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- De Oliveira, A.C.; Sulzer, J.S.; Deshpande, A.D. Assessment of Upper-Extremity Joint Angles Using Harmony Exoskeleton. IEEE Trans. Neural Syst. Rehabil. Eng. 2021, 29, 916–925. [Google Scholar] [CrossRef] [PubMed]
- Ferro, A.; Floría, P.; Villacieros, J.; Muñoz-López, A. Maximum velocity during loaded countermovement jumps obtained with an accelerometer, linear encoder and force platform: A comparison of technologies. J. Biomech. 2019, 95, 109281. [Google Scholar] [CrossRef] [PubMed]
- McGrath, G.; Flanagan, E.; O’Donovan, P.; Collins, D.; Kenny, I. Velocity based training: Validity of monitoring devices to assess mean concentric velocity in the bench press exercise. J. Aust. Strength Cond. 2018, 26, 23–30. [Google Scholar]
- Jovanović, M.; Flanagan, E.P. Researched applications of velocity based strength training. J. Aust. Strength Cond. 2014, 22, 58–69. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Loads (%RM) | r | ICC (2,1) | RMSE |
|---|---|---|---|
| 30% | 0.997 | 0.999 | 0.009 |
| 45% | 0.998 | 0.999 | 0.010 |
| 60% | 0.997 | 0.998 | 0.010 |
| 75% | 0.997 | 0.999 | 0.005 |
| 90% | 0.998 | 1.000 | 0.005 |
| All | 0.998 | 0.998 | 0.009 |
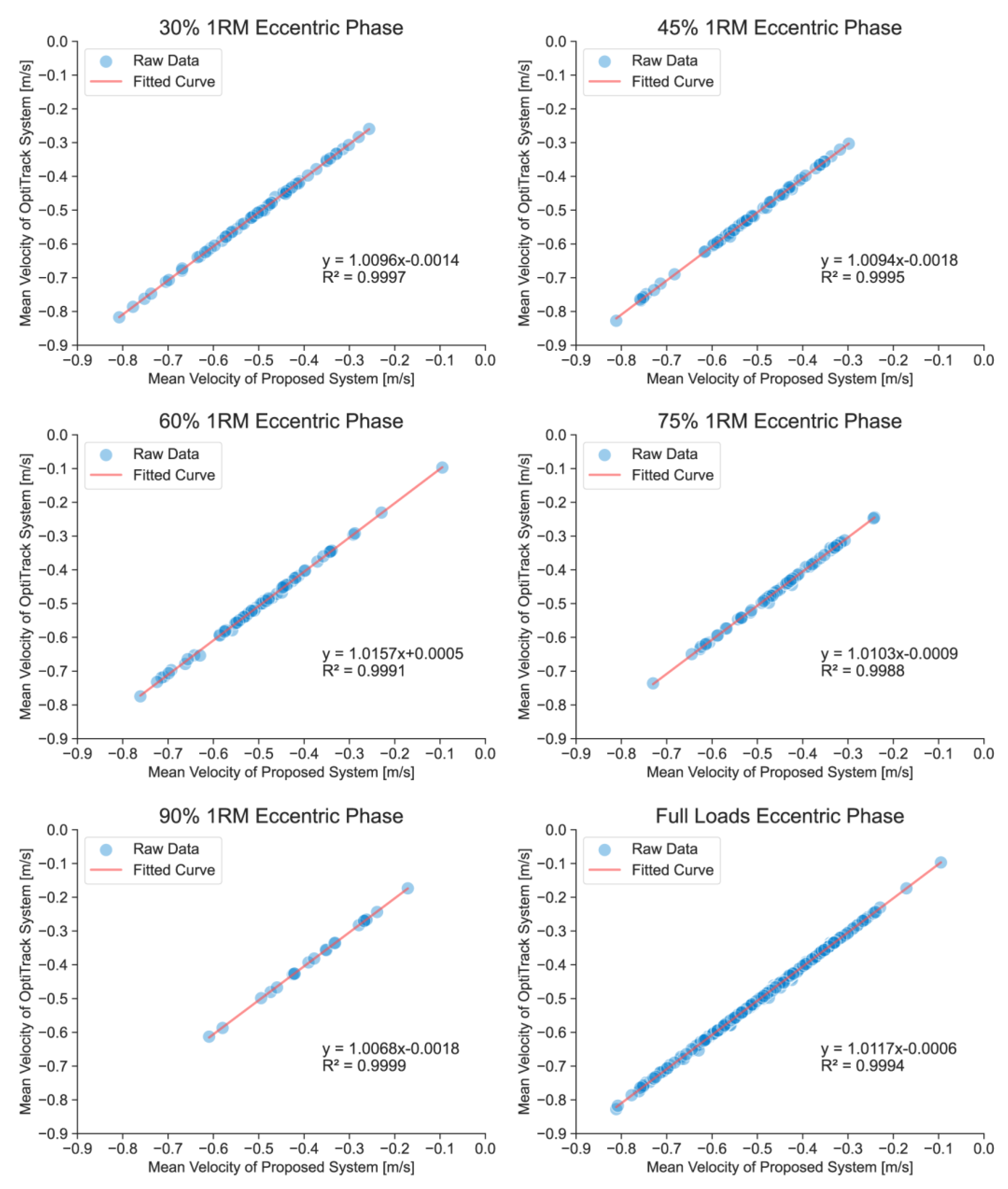
| Loads (%RM) | r | ICC (2,1) | RMSE |
|---|---|---|---|
| 30% | 0.998 | 0.999 | 0.007 |
| 45% | 0.999 | 0.999 | 0.007 |
| 60% | 0.998 | 0.999 | 0.008 |
| 75% | 0.998 | 0.999 | 0.007 |
| 90% | 0.997 | 1.000 | 0.005 |
| All | 0.997 | 0.999 | 0.007 |
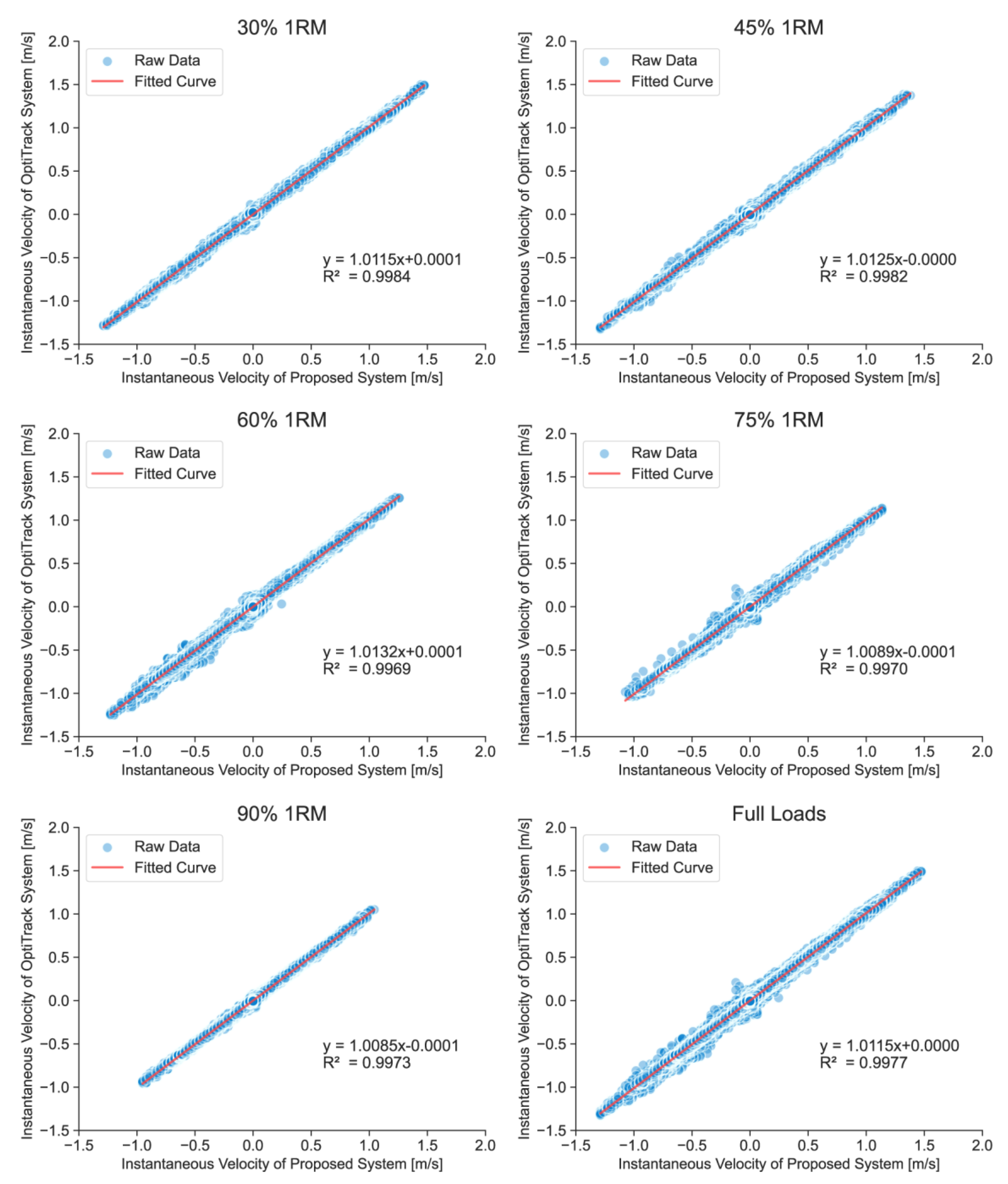
| Loads (%RM) | r | ICC(2,1) | RMSE | CMC |
|---|---|---|---|---|
| 30% | 0.999 | 1.000 | 0.021 | 1.000 |
| 45% | 0.999 | 0.999 | 0.023 | 0.999 |
| 60% | 0.998 | 0.999 | 0.028 | 0.999 |
| 75% | 0.998 | 0.999 | 0.024 | 0.999 |
| 90% | 0.999 | 0.999 | 0.017 | 0.999 |
| All | 0.999 | 0.999 | 0.023 | 0.999 |
| Loads (%RM) | CON | ECC | Full-Waveform | |||
|---|---|---|---|---|---|---|
| FRTMS (m/s) | OptiTrack (m/s) | FRTMS (m/s) | OptiTrack (m/s) | FRTMS (m/s) | OptiTrack (m/s) | |
| 30% | 0.629 ± 0.146 | 0.637 ± 0.147 | 0.504 ± 0.126 | 0.510 ± 0.127 | 0.384 ± 0.340 | 0.391 ± 0.342 |
| 45% | 0.606 ± 0.126 | 0.614 ± 0.128 | 0.520 ± 0.121 | 0.528 ± 0.122 | 0.392 ± 0.331 | 0.399 ± 0.333 |
| 60% | 0.554 ± 0.123 | 0.563 ± 0.124 | 0.494 ± 0.124 | 0.501 ± 0.126 | 0.367 ± 0.309 | 0.375 ± 0.311 |
| 75% | 0.476 ± 0.096 | 0.481 ± 0.097 | 0.451 ± 0.104 | 0.457 ± 0.105 | 0.329 ± 0.270 | 0.335 ± 0.270 |
| 90% | 0.378 ± 0.096 | 0.382 ± 0.097 | 0.370 ± 0.111 | 0.374 ± 0.111 | 0.218 ± 0.225 | 0.223 ± 0.224 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, C.; Zhang, K.; Cui, Y.; Tian, Y.; Wang, S.; Cao, J.; Shen, Y. Development and Evaluation of a Full-Waveform Resistance Training Monitoring System Based on a Linear Position Transducer. Sensors 2023, 23, 2435. https://doi.org/10.3390/s23052435
Lu C, Zhang K, Cui Y, Tian Y, Wang S, Cao J, Shen Y. Development and Evaluation of a Full-Waveform Resistance Training Monitoring System Based on a Linear Position Transducer. Sensors. 2023; 23(5):2435. https://doi.org/10.3390/s23052435
Chicago/Turabian StyleLu, Changda, Kaiyu Zhang, Yixiong Cui, Yinsheng Tian, Siyao Wang, Jie Cao, and Yanfei Shen. 2023. "Development and Evaluation of a Full-Waveform Resistance Training Monitoring System Based on a Linear Position Transducer" Sensors 23, no. 5: 2435. https://doi.org/10.3390/s23052435