
Vision Transformers (ViT) for Blanket-Penetrating Sleep Posture Recognition Using a Triple Ultra-Wideband (UWB) Radar System
 , ,
, ,  and
and 
Abstract
:1. Introduction
2. Materials and Methods
2.1. Hardware and Software Configuration
2.2. System Setup
2.3. Participant Recruitment and Data Collection
2.4. Data Processing
2.5. Model Training
2.6. Model Validation
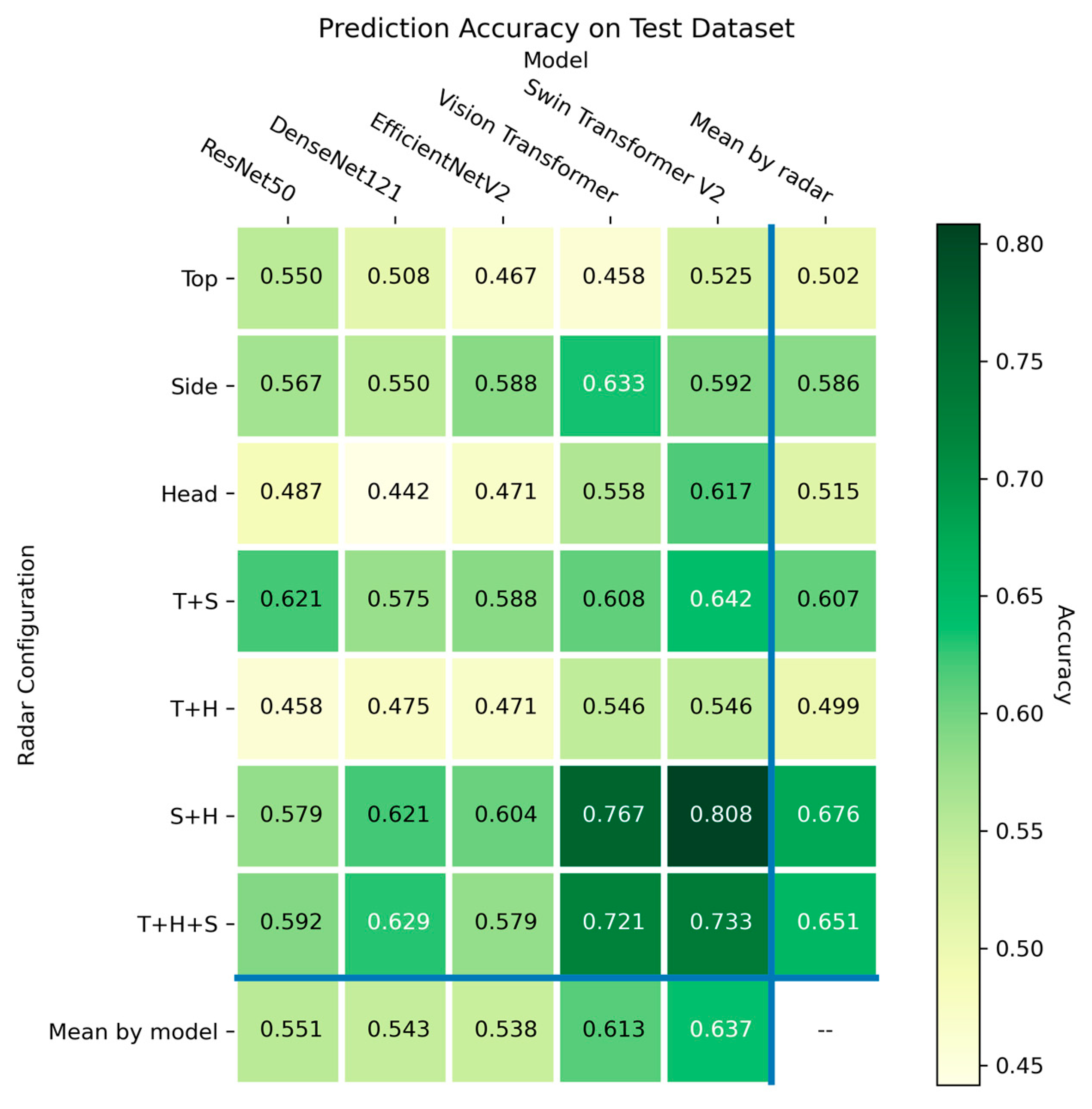
3. Results
3.1. Performance of Different Models
3.2. Performance of the Radar Configurations
3.3. Subgroup Analysis on Posture Conditions
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Senaratna, C.V.; Perret, J.L.; Lodge, C.J.; Lowe, A.J.; Campbell, B.E.; Matheson, M.C.; Hamilton, G.S.; Dharmage, S.C. Prevalence of obstructive sleep apnea in the general population: A systematic review. Sleep Med. Rev. 2017, 34, 70–81. [Google Scholar] [CrossRef] [PubMed]
- Strollo Jr, P.J.; Rogers, R.M. Obstructive sleep apnea. N. Engl. J. Med. 1996, 334, 99–104. [Google Scholar] [CrossRef] [PubMed]
- Caples, S.M.; Gami, A.S.; Somers, V.K. Obstructive sleep apnea. Ann. Intern. Med. 2005, 142, 187–197. [Google Scholar] [CrossRef] [PubMed]
- Ho, M.L.; Brass, S.D. Obstructive Sleep Apnea. Neurol. Int. 2011, 3, e15. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wickwire, E.M. Value-based sleep and breathing: Health economic aspects of obstructive sleep apnea. Fac. Rev. 2021, 10, 40. [Google Scholar] [CrossRef] [PubMed]
- Richard, W.; Kox, D.; den Herder, C.; Laman, M.; van Tinteren, H.; de Vries, N. The role of sleep position in obstructive sleep apnea syndrome. Eur. Arch. Oto-Rhino-Laryngol. Head Neck 2006, 263, 946–950. [Google Scholar] [CrossRef] [PubMed]
- Menon, A.; Kumar, M. Influence of body position on severity of obstructive sleep apnea: A systematic review. Int. Sch. Res. Not. 2013, 2013, 670381. [Google Scholar] [CrossRef] [Green Version]
- Isono, S.; Shimada, A.; Utsugi, M.; Konno, A.; Nishino, T. Comparison of static mechanical properties of the passive pharynx between normal children and children with sleep-disordered breathing. Am. J. Respir. Crit. Care Med. 1998, 157, 1204–1212. [Google Scholar] [CrossRef] [PubMed]
- Fallmann, S.; Chen, L. Computational sleep behavior analysis: A survey. IEEE Access 2019, 7, 142421–142440. [Google Scholar] [CrossRef]
- Li, X.; Gong, Y.; Jin, X.; Shang, P. Sleep posture recognition based on machine learning: A systematic review. Pervasive Mob. Comput. 2023, 90, 101752. [Google Scholar] [CrossRef]
- Enayati, M.; Skubic, M.; Keller, J.M.; Popescu, M.; Farahani, N.Z. Sleep posture classification using bed sensor data and neural networks. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 461–465. [Google Scholar]
- Han, P.; Li, L.; Zhang, H.; Guan, L.; Marques, C.; Savović, S.; Ortega, B.; Min, R.; Li, X. Low-cost plastic optical fiber sensor embedded in mattress for sleep performance monitoring. Opt. Fiber Technol. 2021, 64, 102541. [Google Scholar] [CrossRef]
- Wong, D.W.-C.; Wang, Y.; Lin, J.; Tan, Q.; Chen, T.L.-W.; Zhang, M. Sleeping mattress determinants and evaluation: A biomechanical review and critique. PeerJ 2019, 7, e6364. [Google Scholar] [CrossRef] [Green Version]
- Tam, A.Y.-C.; Zha, L.-W.; So, B.P.-H.; Lai, D.K.-H.; Mao, Y.-J.; Lim, H.-J.; Wong, D.W.-C.; Cheung, J.C.-W. Depth-Camera-Based Under-Blanket Sleep Posture Classification Using Anatomical Landmark-Guided Deep Learning Model. Int. J. Environ. Res. Public Health 2022, 19, 13491. [Google Scholar] [CrossRef]
- Tam, A.Y.-C.; So, B.P.-H.; Chan, T.T.-C.; Cheung, A.K.-Y.; Wong, D.W.-C.; Cheung, J.C.-W. A Blanket Accommodative Sleep Posture Classification System Using an Infrared Depth Camera: A Deep Learning Approach with Synthetic Augmentation of Blanket Conditions. Sensors 2021, 21, 5553. [Google Scholar] [CrossRef] [PubMed]
- Masek, M.; Lam, C.P.; Tranthim-Fryer, C.; Jansen, B.; Baptist, K. Sleep monitor: A tool for monitoring and categorical scoring of lying position using 3D camera data. SoftwareX 2018, 7, 341–346. [Google Scholar] [CrossRef]
- Ren, W.; Ma, O.; Ji, H.; Liu, X. Human posture recognition using a hybrid of fuzzy logic and machine learning approaches. IEEE Access 2020, 8, 135628–135639. [Google Scholar] [CrossRef]
- Cheung, J.C.-W.; So, B.P.-H.; Ho, K.H.M.; Wong, D.W.-C.; Lam, A.H.-F.; Cheung, D.S.K. Wrist accelerometry for monitoring dementia agitation behaviour in clinical settings: A scoping review. Front. Psychiatry 2022, 13, 913213. [Google Scholar] [CrossRef] [PubMed]
- Eyobu, O.S.; Kim, Y.W.; Cha, D.; Han, D.S. A real-time sleeping position recognition system using IMU sensor motion data. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; pp. 1–2. [Google Scholar]
- Davoodnia, V.; Etemad, A. Identity and posture recognition in smart beds with deep multitask learning. In Proceedings of the 2019 IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 3054–3059. [Google Scholar]
- Demiris, G.; Hensel, B.K.; Skubic, M.; Rantz, M. Senior residents’ perceived need of and preferences for “smart home” sensor technologies. Int. J. Technol. Assess. Health Care 2008, 24, 120–124. [Google Scholar] [CrossRef] [PubMed]
- Otero, M. Application of a continuous wave radar for human gait recognition. In Proceedings of the Signal Processing, Sensor Fusion, and Target Recognition XIV, Orlando, FL, USA, 25 May 2005; pp. 538–548. [Google Scholar]
- Kebe, M.; Gadhafi, R.; Mohammad, B.; Sanduleanu, M.; Saleh, H.; Al-Qutayri, M. Human vital signs detection methods and potential using radars: A review. Sensors 2020, 20, 1454. [Google Scholar] [CrossRef] [Green Version]
- Lee, Y.; Park, J.-Y.; Choi, Y.-W.; Park, H.-K.; Cho, S.-H.; Cho, S.H.; Lim, Y.-H. A novel non-contact heart rate monitor using impulse-radio ultra-wideband (IR-UWB) radar technology. Sci. Rep. 2018, 8, 13053. [Google Scholar] [CrossRef]
- Yim, D.; Lee, W.H.; Kim, J.I.; Kim, K.; Ahn, D.H.; Lim, Y.-H.; Cho, S.H.; Park, H.-K.; Cho, S.H. Quantified activity measurement for medical use in movement disorders through IR-UWB radar sensor. Sensors 2019, 19, 688. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ahmed, S.; Cho, S.H. Hand Gesture Recognition Using an IR-UWB Radar with an Inception Module-Based Classifier. Sensors 2020, 20, 564. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Rana, S.P.; Dey, M.; Ghavami, M.; Dudley, S. Markerless gait classification employing 3D IR-UWB physiological motion sensing. IEEE Sens. J. 2022, 22, 6931–6941. [Google Scholar] [CrossRef]
- Lai, D.K.-H.; Zha, L.-W.; Leung, T.Y.-N.; Tam, A.Y.-C.; So, B.P.-H.; Lim, H.-J.; Cheung, D.S.K.; Wong, D.W.-C.; Cheung, J.C.-W. Dual ultra-wideband (UWB) radar-based sleep posture recognition system: Towards ubiquitous sleep monitoring. Eng. Regen. 2023, 4, 36–43. [Google Scholar] [CrossRef]
- Piriyajitakonkij, M.; Warin, P.; Lakhan, P.; Leelaarporn, P.; Pianpanit, T.; Kumchaiseemak, N.; Suwajanakorn, S.; Niparnan, N.; Mukhopadhyay, S.C.; Wilaiprasitporn, T. SleepPoseNet: Multi-View Learning for Sleep Postural Transition Recognition Using UWB. arXiv 2020, arXiv:2005.02176. [Google Scholar] [CrossRef]
- Kiriazi, J.E.; Islam, S.M.M.; Borić-Lubecke, O.; Lubecke, V.M. Sleep Posture Recognition With a Dual-Frequency Cardiopulmonary Doppler Radar. IEEE Access 2021, 9, 36181–36194. [Google Scholar] [CrossRef]
- Zhou, T.; Xia, Z.; Wang, X.; Xu, F. Human Sleep Posture Recognition Based on Millimeter-Wave Radar. In Proceedings of the 2021 Signal Processing Symposium (SPSympo), Łódź, Poland, 20–23 September 2021; pp. 316–321. [Google Scholar]
- Wang, Q.; Wu, B.; Zhu, P.; Li, P.; Zuo, W.; Hu, Q. ECA-Net: Efficient channel attention for deep convolutional neural networks. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, Online, 13–19 June 2020; pp. 11534–11542. [Google Scholar]
- Han, K.; Wang, Y.; Chen, H.; Chen, X.; Guo, J.; Liu, Z.; Tang, Y.; Xiao, A.; Xu, C.; Xu, Y. A survey on vision transformer. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 45, 87–110. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2020, arXiv:2010.11929. [Google Scholar]
- Islam, K. Recent advances in vision transformer: A survey and outlook of recent work. arXiv 2022, arXiv:2203.01536. [Google Scholar]
- Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; Zagoruyko, S. End-to-End Object Detection with Transformers. arXiv 2020, arXiv:2005.12872. [Google Scholar] [CrossRef]
- Wang, H.; Zhu, Y.; Adam, H.; Yuille, A.; Chen, L.-C. MaX-DeepLab: End-to-End Panoptic Segmentation with Mask Transformers. arXiv 2020, arXiv:2012.00759. [Google Scholar] [CrossRef]
- Chen, Y.-S.; Cheng, K.-H.; Xu, Y.-A.; Juang, T.-Y. Multi-Feature Transformer-Based Learning for Continuous Human Motion Recognition with High Similarity Using mmWave FMCW Radar. Sensors 2022, 22, 8409. [Google Scholar] [CrossRef]
- Huang, L.; Tan, J.; Liu, J.; Yuan, J. Hand-transformer: Non-autoregressive structured modeling for 3d hand pose estimation. In Proceedings of the Computer Vision–ECCV 2020: 16th European Conference, Glasgow, UK, 23–28 August 2020; Proceedings, Part XXV 16. pp. 17–33. [Google Scholar]
- Zhou, Y.; Xu, C.; Zhao, L.; Zhu, A.; Hu, F.; Li, Y. CSI-Former: Pay More Attention to Pose Estimation with WiFi. Entropy 2023, 25, 20. [Google Scholar] [CrossRef] [PubMed]
- Chen, S.; He, W.; Ren, J.; Jiang, X. Attention-Based Dual-Stream Vision Transformer for Radar Gait Recognition. In Proceedings of the ICASSP 2022–2022 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Singapore, 23–27 May 2022; pp. 3668–3672. [Google Scholar]
- Mogan, J.N.; Lee, C.P.; Lim, K.M.; Muthu, K.S. Gait-ViT: Gait Recognition with Vision Transformer. Sensors 2022, 22, 7362. [Google Scholar] [CrossRef]
- Rahali, A.; Akhloufi, M.A. End-to-End Transformer-Based Models in Textual-Based NLP. AI 2023, 4, 54–110. [Google Scholar] [CrossRef]
- Li, H.; Huang, J.; Ji, S. Bearing fault diagnosis with a feature fusion method based on an ensemble convolutional neural network and deep neural network. Sensors 2019, 19, 2034. [Google Scholar] [CrossRef] [Green Version]
- Cuenat, S.; Couturier, R. Convolutional neural network (cnn) vs vision transformer (vit) for digital holography. In Proceedings of the 2022 2nd International Conference on Computer, Control and Robotics (ICCCR), Shanghai, China, 18–20 March 2022; pp. 235–240. [Google Scholar]
- Kyathanahally, S.P.; Hardeman, T.; Reyes, M.; Merz, E.; Bulas, T.; Brun, P.; Pomati, F.; Baity-Jesi, M. Ensembles of data-efficient vision transformers as a new paradigm for automated classification in ecology. Sci. Rep. 2022, 12, 18590. [Google Scholar] [CrossRef] [PubMed]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. arXiv 2015, arXiv:1512.03385. [Google Scholar]
- Huang, G.; Liu, Z.; van der Maaten, L.; Weinberger, K.Q. Densely Connected Convolutional Networks. arXiv 2016, arXiv:1608.06993. [Google Scholar]
- Tan, M.; Le, Q.V. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. arXiv 2019, arXiv:1905.11946. [Google Scholar]
- Liu, Z.; Lin, Y.; Cao, Y.; Hu, H.; Wei, Y.; Zhang, Z.; Lin, S.; Guo, B. Swin Transformer: Hierarchical Vision Transformer using Shifted Windows. arXiv 2021, arXiv:2103.14030. [Google Scholar]
- Taewoong Um, T.; Pfister, F.M.J.; Pichler, D.; Endo, S.; Lang, M.; Hirche, S.; Fietzek, U.; Kulić, D. Data Augmentation of Wearable Sensor Data for Parkinson’s Disease Monitoring using Convolutional Neural Networks. arXiv 2017, arXiv:1706.00527. [Google Scholar]
- Iwana, B.K.; Uchida, S. An empirical survey of data augmentation for time series classification with neural networks. PLoS ONE 2021, 16, e0254841. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Kai, L.; Li, F.-F. ImageNet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Hyun, E.; Jin, Y.S.; Lee, J.H. Moving and stationary target detection scheme using coherent integration and subtraction for automotive FMCW radar systems. In Proceedings of the 2017 IEEE Radar Conference (RadarConf), Seattle, WA, USA, 8–12 May 2017; pp. 476–481. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. arXiv 2017, arXiv:1706.03762. [Google Scholar]
- Tan, M.; Le, Q.V. EfficientNetV2: Smaller Models and Faster Training. arXiv 2021, arXiv:2104.00298. [Google Scholar]
- Wang, W.; Li, X.; Yang, J.; Lu, T. Mixed Link Networks. arXiv 2018, arXiv:1802.01808. [Google Scholar]
- Liang, X.; Zhang, H.; Fang, G.; Ye, S.; Gulliver, T.A. An Improved Algorithm for Through-Wall Target Detection Using Ultra-Wideband Impulse Radar. IEEE Access 2017, 5, 22101–22118. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, S.; Song, B.C. Vision Transformer for Small-Size Datasets. arXiv 2021, arXiv:2112.13492. [Google Scholar] [CrossRef]
- Mohammadi, S.M.; Alnowami, M.; Khan, S.; Dijk, D.J.; Hilton, A.; Wells, K. Sleep Posture Classification using a Convolutional Neural Network. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 1–4. [Google Scholar]
- Qiu, L.; Huang, Z.; Wirström, N.; Voigt, T. 3DinSAR: Object 3D localization for indoor RFID applications. In Proceedings of the 2016 IEEE International Conference on RFID (RFID), Orlando, FL, USA, 3–5 May 2016; pp. 1–8. [Google Scholar]
- Soekhoe, D.; van der Putten, P.; Plaat, A. On the Impact of Data Set Size in Transfer Learning Using Deep Neural Networks. In Advances in Intelligent Data Analysis XV.IDA 2016. Lecture Notes in Computer Science, Boström, H., Knobbe, A., Soares, C., Papapetrou, P., Ed.Boström, H., Knobbe, A., Soares, C., Papapetrou, P., Eds.; Advances in Intelligent Data Analysis XV; Springer International Publishing: Cham, Switzerland, 2016; Volume 9897, pp. 50–60. [Google Scholar]
- Cheung, J.C.-W.; Tam, E.W.-C.; Mak, A.H.-Y.; Chan, T.T.-C.; Zheng, Y.-P. A night-time monitoring system (eNightLog) to prevent elderly wandering in hostels: A three-month field study. Int. J. Environ. Res. Public Health 2022, 19, 2103. [Google Scholar] [CrossRef]
- Cheung, J.C.; Tam, E.W.; Mak, A.H.; Chan, T.T.; Lai, W.P.; Zheng, Y.P. Night-Time Monitoring System (eNightLog) for Elderly Wandering Behavior. Sensors 2021, 21, 704. [Google Scholar] [CrossRef]
- Alp Güler, R.; Neverova, N.; Kokkinos, I. DensePose: Dense Human Pose Estimation In The Wild. arXiv 2018, arXiv:1802.00434. [Google Scholar]
- Geng, J.; Huang, D.; De la Torre, F. DensePose From WiFi. arXiv 2022, arXiv:2301.00250. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Top Radar | Side Radar | Head Radar |
|---|---|---|---|
| Detection Range | 1.3 m–1.8 m | 0.6 m–1.1 m | 0.4 m–1.2 m |
| Transmission Power | 6.3 dBm | 6.3 dBm | 6.3 dBm |
| Pulse Repetition Frequency | 15.188 MHz | 15.188 MHz | 15.188 MHz |
| Bin Resolution | 78 bins | 78 bins | 125 bins |
| Frame Rate | 20 frames/second | 20 frames/second | 20 frames/second |
| Source | n | np | Stationary or Transitional | Hardware | Classifier | DL | Blanket | Accuracy |
|---|---|---|---|---|---|---|---|---|
| This study | 30 | 4 | Stationary | IR-UWB (Xethru X4M03) | Swin Transformer | Y | Y | 0.808 |
| Piriyajitakonkij et al. [29] | 38 | 4 | Transitional | IR-UWB (Xethru X4M03) | SleepPoseNet (Deep CNN with Multi-View Learning) | Y | N | 0.737 |
| Lai et al. [28] | 18 | 4 | Stationary | IR-UWB (Xethru X4M03) | Random Forest | N | N | 0.938 |
| Kiriazi et al. [30] | 20 | 3 | Stationary | Dual frequency Doppler radar system | Decision Tree | N | N | 0.984 |
| Zhou et al. [31] | 8 | 8 | Transitional | FMCW radar system | CNN with Inception Residual module | Y | N | 0.872 |
| Tam et al. [14] | 120 | 7 | Stationary | Depth camera (Realsense D435i) | ECA-Net50 | Y | Y | 0.915 |
| Mohammadi et al. [60] | 12 | 12 | Stationary | Depth camera (Microsoft Kinect) | CNN | Y | Y | 0.760 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lai, D.K.-H.; Yu, Z.-H.; Leung, T.Y.-N.; Lim, H.-J.; Tam, A.Y.-C.; So, B.P.-H.; Mao, Y.-J.; Cheung, D.S.K.; Wong, D.W.-C.; Cheung, J.C.-W. Vision Transformers (ViT) for Blanket-Penetrating Sleep Posture Recognition Using a Triple Ultra-Wideband (UWB) Radar System. Sensors 2023, 23, 2475. https://doi.org/10.3390/s23052475
Lai DK-H, Yu Z-H, Leung TY-N, Lim H-J, Tam AY-C, So BP-H, Mao Y-J, Cheung DSK, Wong DW-C, Cheung JC-W. Vision Transformers (ViT) for Blanket-Penetrating Sleep Posture Recognition Using a Triple Ultra-Wideband (UWB) Radar System. Sensors. 2023; 23(5):2475. https://doi.org/10.3390/s23052475
Chicago/Turabian StyleLai, Derek Ka-Hei, Zi-Han Yu, Tommy Yau-Nam Leung, Hyo-Jung Lim, Andy Yiu-Chau Tam, Bryan Pak-Hei So, Ye-Jiao Mao, Daphne Sze Ki Cheung, Duo Wai-Chi Wong, and James Chung-Wai Cheung. 2023. "Vision Transformers (ViT) for Blanket-Penetrating Sleep Posture Recognition Using a Triple Ultra-Wideband (UWB) Radar System" Sensors 23, no. 5: 2475. https://doi.org/10.3390/s23052475