
3D Off-Grid Localization for Adjacent Cavitation Noise Sources Using Bayesian Inference

Abstract
:1. Introduction
2. Off-Grid Broadband Signal Model for Cavitation Localization
2.1. Off-Grid Narrowband Signal Model
2.2. Off-Grid Cavitation Signal Model
2.3. Stochastic Model for Off-Grid Cavitation Localization
3. Pairwise Off-Grid BSBL for Cavitation Localization
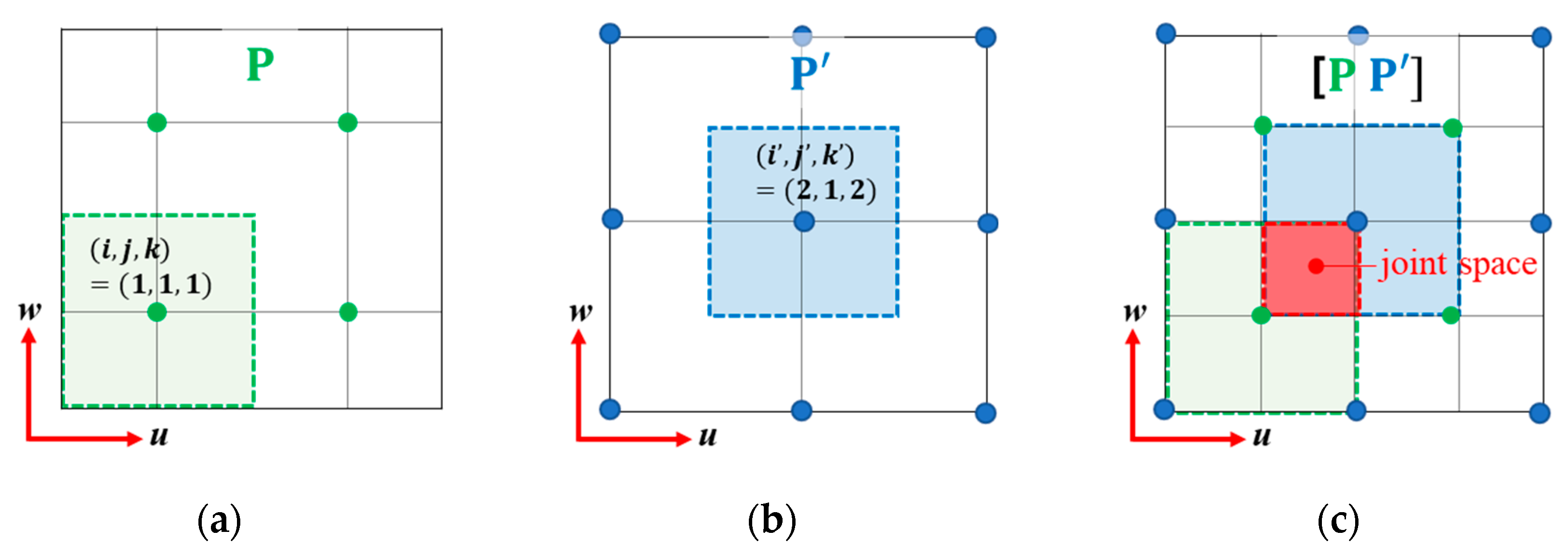
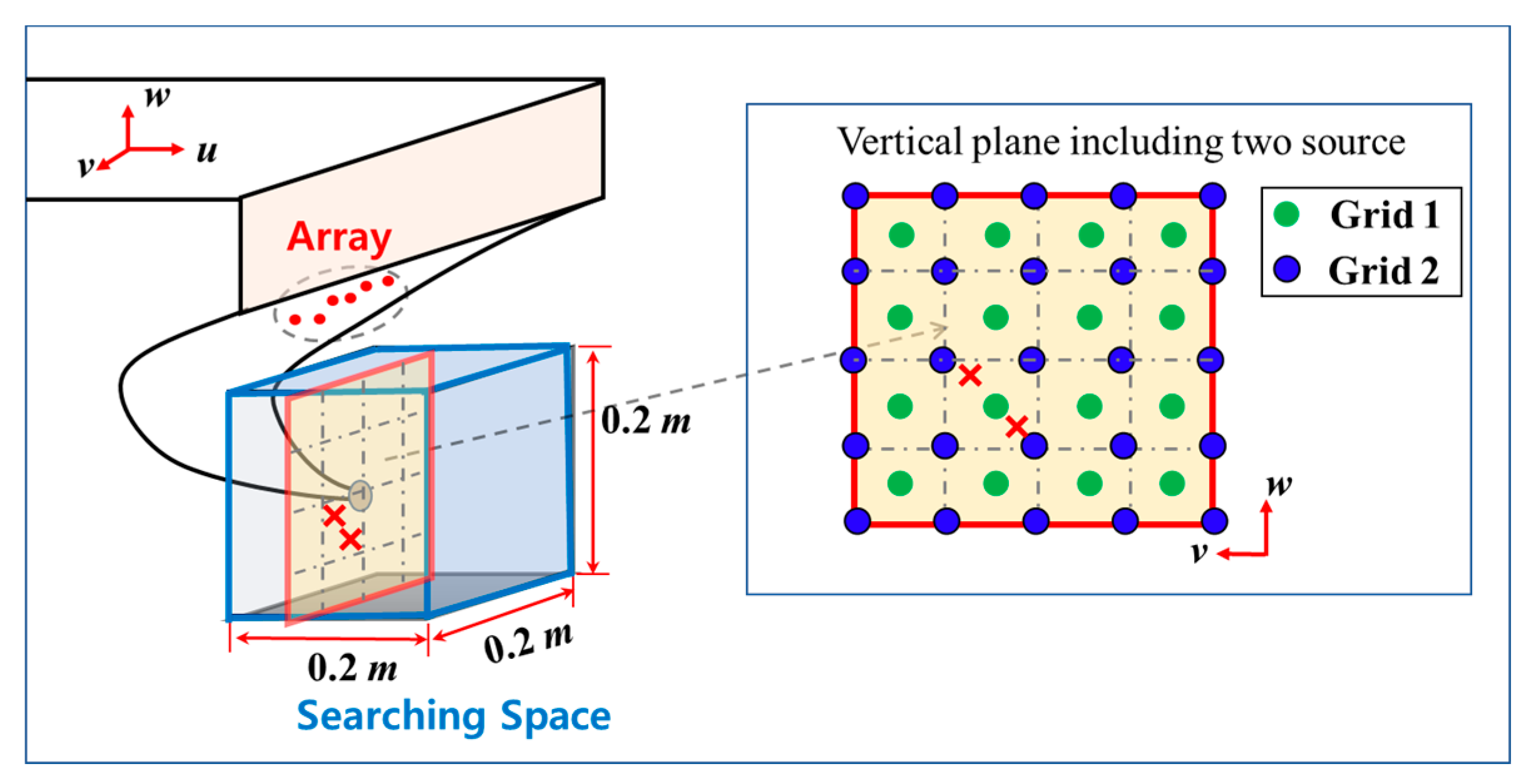
3.1. Two Different Grid Sets: Pairwise Off-Grid
3.2. Grid Update and Bounds
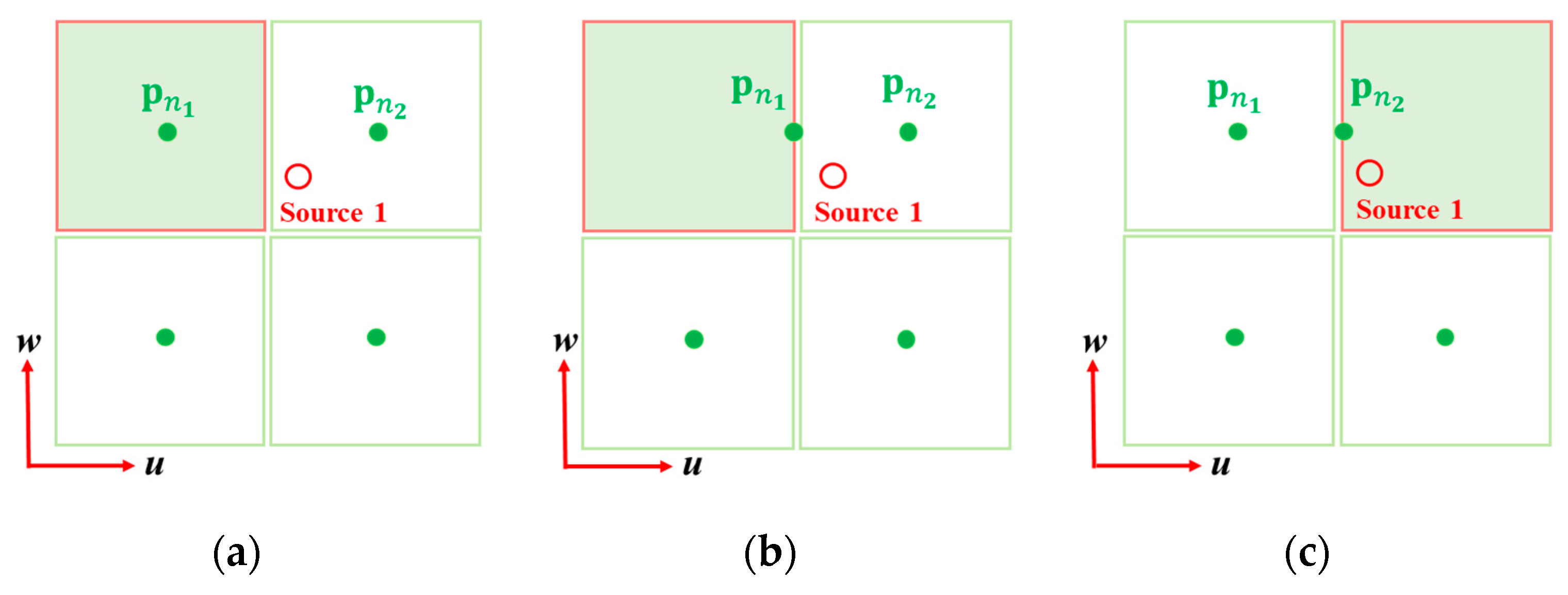
3.3. Grid Acvitation and Transfer
3.4. Estimating the Nuisance Parameters
3.5. Localization Scheme Using Pairwise Off-Grid BSBL
| Algoritm 1. 3D pairwise off-grid cavitation localization algorithm. |
| 1: Input: y, A and at pairwise grids [ ] |
| (Initial transformation matrix and derivative matrices) |
| 2: Initialization: |
| 3: while k < 2000 do |
| 4: |
| 5: |
| 6: for n = 1; n ≤ N + N′; n++ do |
| 7: |
| 8: |
| 9: end for |
| 10: |
| 11: |
| 12: |
| 13: |
| 14: (according to update and activation rule) |
| 15: re-estimate the (according to transfer rule) |
| 16: |
| 17: , k = k + 1 |
| 18: end while |
| 19: |
| 20: Output: , |
4. Results
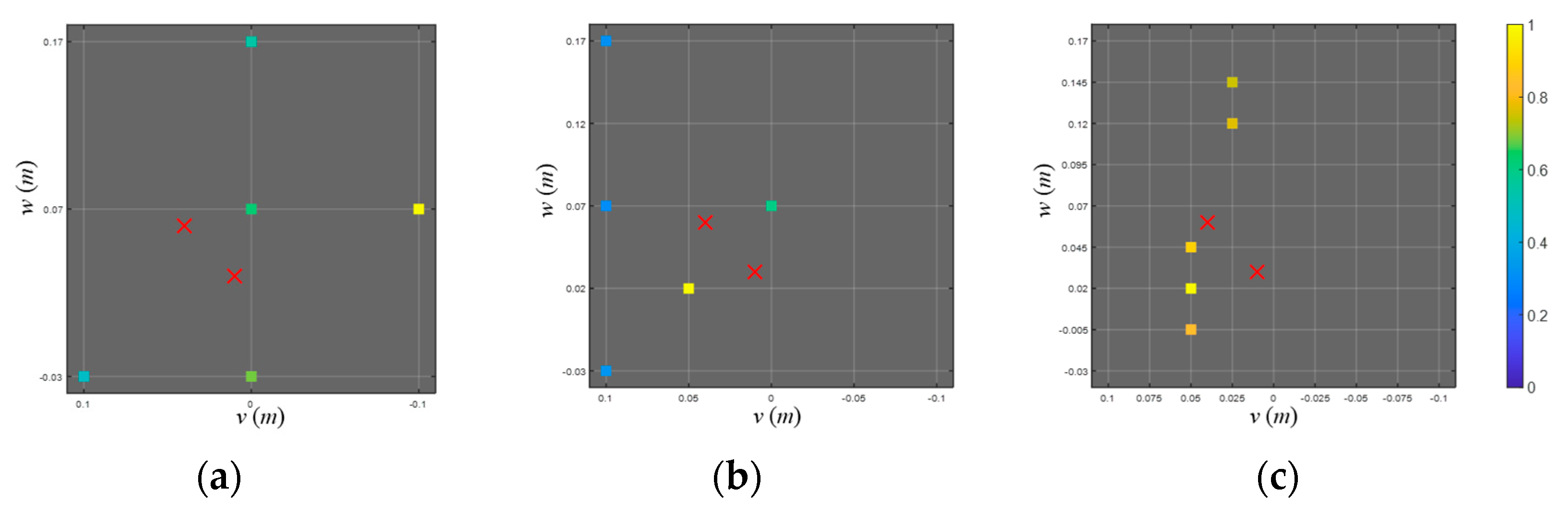
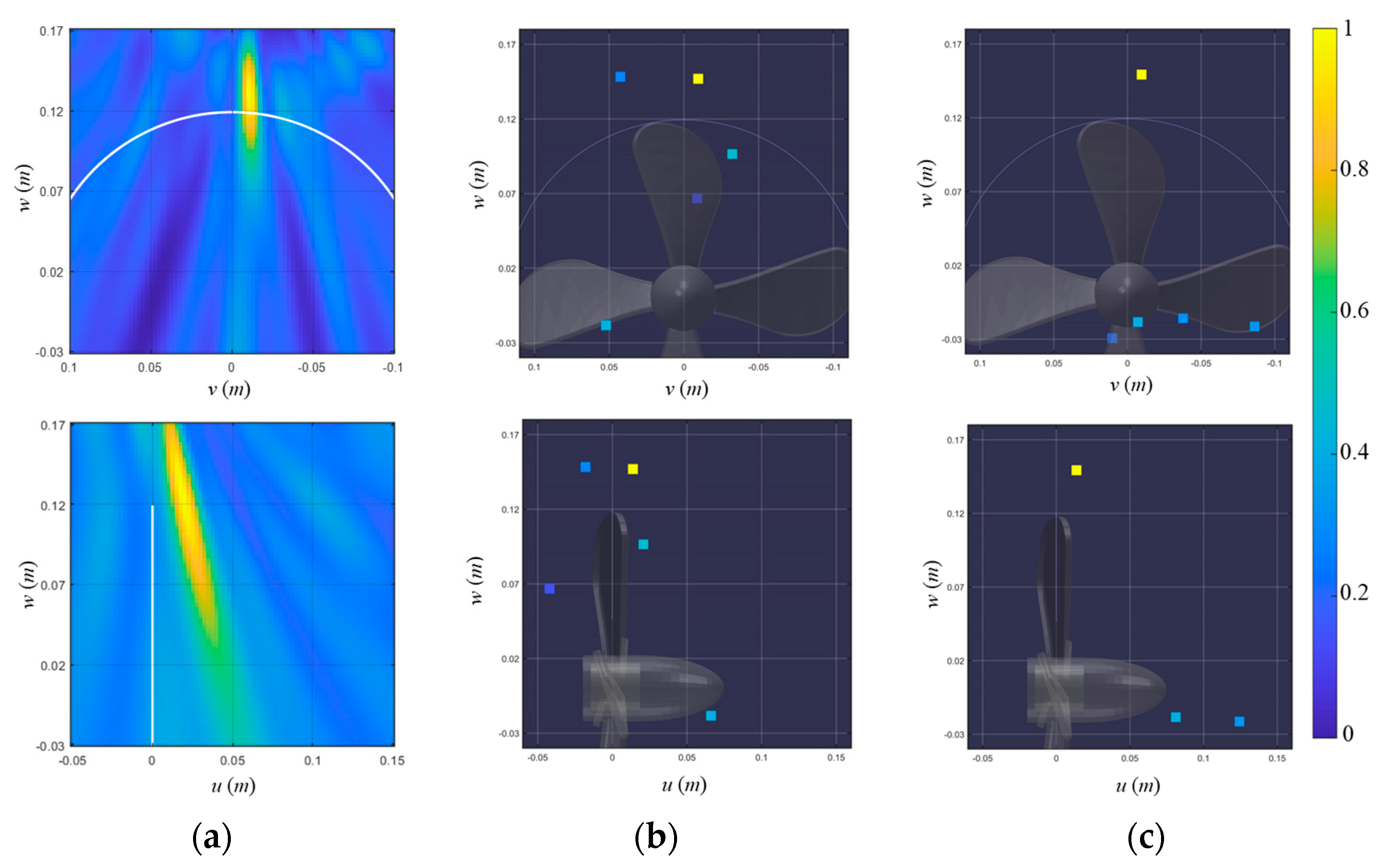
4.1. Localization of Synthetic Noise Sources
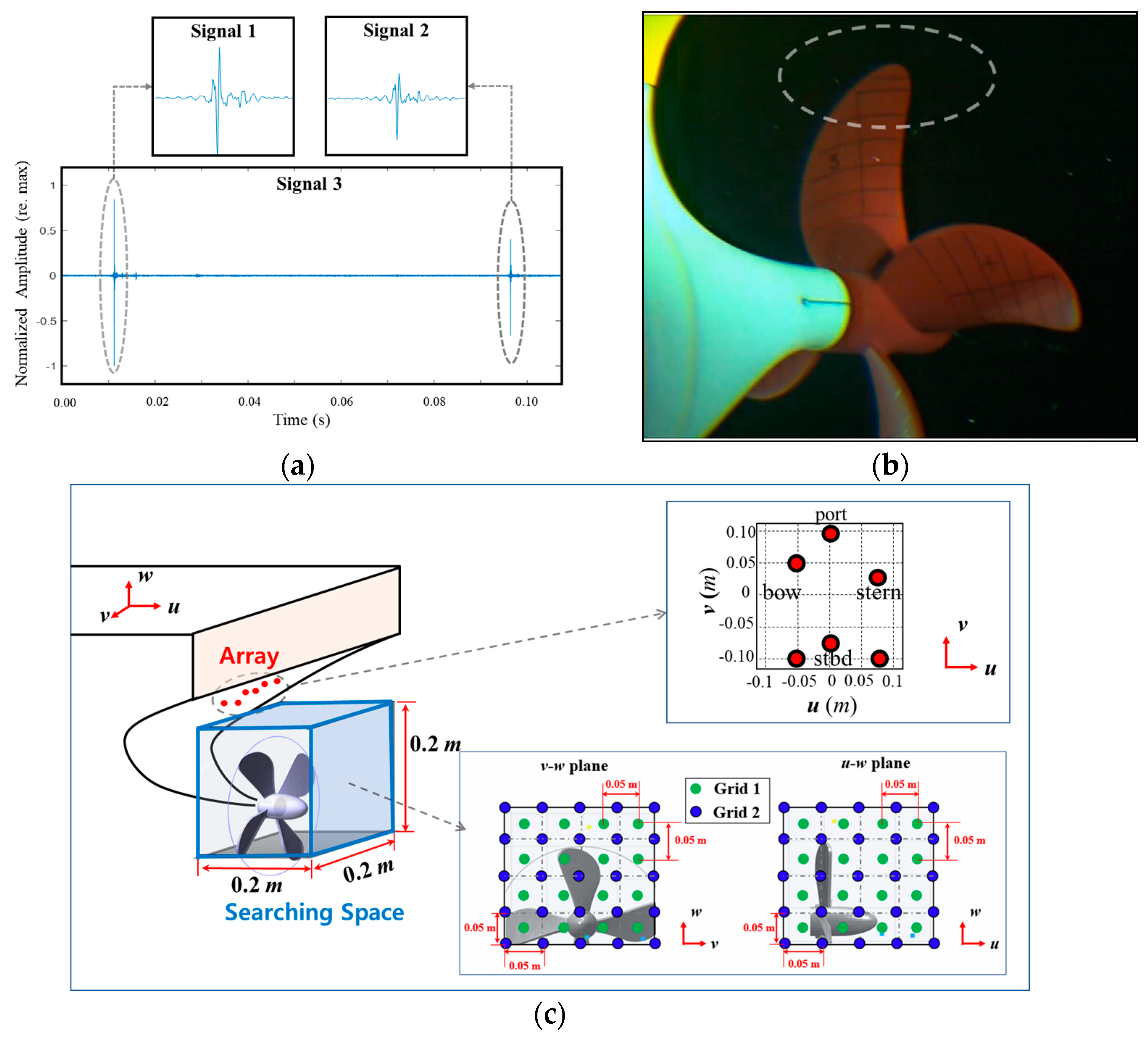
4.2. Localization of Transducer Source
4.3. Localization of Cavitation Noise Source
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Stochastic Model of Pairwise Off-Grid Cavitation System
Appendix B. Experimental Setup and Data Acquisition for Incipient TVC

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Setup | |
|---|---|
| Ship type | Tanker |
| Flow speed (m/s) | 4 |
| Propeller radius (m) | 0.119 |
| Pressure (bar) | 0.65 |
| RPM/RPS | 1390/23.2 |
| Dissolved oxygen content (%) | 75 |
| ) | 4.12 |

References
- Lecoffre, Y. Cavitation: Bubble Trackers; A.A. Balkema: Rotterdam, The Netherlands, 1999; pp. 140–210. [Google Scholar]
- Chang, N.A.; Ceccio, S.L. The acoustic emissions of cavitation bubbles in stretched vortices. J. Acoust. Soc. Am. 2011, 130, 3209–3219. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kim, D.; Seong, W.; Choo, Y.; Lee, J. Localization of incipient tip vortex cavitation using ray based matched field inversion method. J. Sound Vib. 2015, 354, 34–46. [Google Scholar] [CrossRef]
- Park, C.; Seol, H.; Kim, K.; Seong, W. A study on propeller noise source localization in a cavitation tunnel. Ocean Eng. 2009, 36, 754–762. [Google Scholar] [CrossRef]
- Park, C.; Kim, G.D.; Park, Y.H.; Lee, K.; Seong, W. Noise Localization Method for Model Tests in a Large Cavitation Tunnel Using a Hydrophone Array. Remote Sens 2016, 8, 195. [Google Scholar] [CrossRef] [Green Version]
- Lee, K.; Lee, J.; Kim, D.; Kim, K.; Seong, W. Propeller sheet cavitation noise source modeling and inversion. J. Sound Vib. 2014, 333, 1356–1368. [Google Scholar] [CrossRef]
- Choo, Y.; Seong, W. Compressive spherical beamforming for localization of incipient tip vortex cavitation. J. Acoust. Soc. Am. 2016, 140, 4085–4090. [Google Scholar] [CrossRef]
- Lee, J.H. Acoustic localization of incipient cavitation in marine propeller using greedy-type compressive sensing. Ocean Eng. 2020, 197, 106894. [Google Scholar] [CrossRef]
- Park, Y.; Seong, W.; Gerstoft, P. Block-sparse two-dimensional off-grid beamforming with arbitrary planar array geometry. J. Acoust. Soc. Am. 2020, 147, 2184–2191. [Google Scholar] [CrossRef]
- Park, M.; Park, Y.; Lee, K.; Seong, W. Incipient tip vortex cavitation localization using block-sparse compressive sensing. J. Acoust. Soc. Am. 2020, 147, 3454–3464. [Google Scholar] [CrossRef]
- Park, M.; Choo, Y. Three-dimensional off-grid localization of incipient tip vortex cavitation using Bayesian inference. Ocean Eng. 2022, 261, 112124. [Google Scholar] [CrossRef]
- Chang, N.A.; Dowling, D.R. Ray-based acoustic localization of cavitation in a highly reverberant environment. J. Acoust. Soc. Am. 2009, 125, 3088–3100. [Google Scholar] [CrossRef] [PubMed]
- Foeth, E.J.; van Doorne, C.W.H.; van Terwisga, T.; Wieneke, B. Time resolved PIV and flow visualization of 3D sheet cavitation. Exp. Fluids 2006, 40, 503–513. [Google Scholar] [CrossRef]
- Kravtsova, A.Y.; Markovich, D.M.; Pervunin, K.S.; Timoshevskiy, M.V.; Hanjalic, K. High-speed visualization and PIV measurements of cavitating flows around a semi-circular leading-edge flat plate and NACA0015 hydrofoil. Int. J. Multiphas. Flow 2014, 60, 119–134. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE T Inform. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Tipping, M.E. Sparse Bayesian learning and the relevance vector machine. J. Mach. Learn. Res. 2001, 1, 211–244. [Google Scholar]
- Malioutov, D.; Cetin, M.; Willsky, A.S. A sparse signal reconstruction perspective for source localization with sensor arrays. IEEE Trans. Signal Process. 2005, 53, 3010–3022. [Google Scholar] [CrossRef] [Green Version]
- Xenaki, A.; Gerstoft, P.; Mosegaard, K. Compressive beamforming. J. Acoust. Soc. Am. 2014, 136, 260–271. [Google Scholar] [CrossRef] [Green Version]
- Gerstoft, P.; Xenaki, A.; Mecklenbrauker, C.F. Multiple and single snapshot compressive beamforming. J. Acoust. Soc. Am. 2015, 138, 2003–2014. [Google Scholar] [CrossRef] [Green Version]
- Gerstoft, P.; Mecklenbrauker, C.F.; Xenaki, A.; Nannuru, S. Multisnapshot Sparse Bayesian Learning for DOA. IEEE Signal Proc. Let. 2016, 23, 1469–1473. [Google Scholar] [CrossRef] [Green Version]
- Yardim, C.; Gerstoft, P.; Hodgkiss, W.S.; Traer, J. Compressive geoacoustic inversion using ambient noise. J. Acoust. Soc. Am. 2014, 135, 1245–1255. [Google Scholar] [CrossRef] [Green Version]
- Chardon, G.; Daudet, L.; Peillot, A.; Ollivier, F.; Bertin, N.; Gribonval, R. Near-field acoustic holography using sparse regularization and compressive sampling principles. J. Acoust. Soc. Am. 2012, 132, 1521–1534. [Google Scholar] [CrossRef] [Green Version]
- Fernandez-Grande, E.; Xenaki, A.; Gerstoft, P. A sparse equivalent source method for near-field acoustic holography. J. Acoust. Soc. Am. 2017, 141, 532–542. [Google Scholar] [CrossRef] [PubMed]
- Ping, G.L.; Fernandez-Grande, E.; Gerstoft, P.; Chu, Z.G. Three-dimensional source localization using sparse Bayesian learning on a spherical microphone array. J. Acoust. Soc. Am. 2020, 147, 3895–3904. [Google Scholar] [CrossRef] [PubMed]
- Yang, Z.; Xie, L.H.; Zhang, C.S. Off-Grid Direction of Arrival Estimation Using Sparse Bayesian Inference. IEEE Trans. Signal Process. 2013, 61, 38–43. [Google Scholar] [CrossRef] [Green Version]
- Xenaki, A.; Gerstoft, P. Grid-free compressive beamforming. J. Acoust. Soc. Am. 2015, 137, 1923–1935. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Dai, J.S.; Bao, X.; Xu, W.C.; Chang, C.Q. Root Sparse Bayesian Learning for Off-Grid DOA Estimation. IEEE Signal Proc. Let. 2017, 24, 46–50. [Google Scholar] [CrossRef] [Green Version]
- Chi, Y.J.; Chen, Y.X. Compressive Two-Dimensional Harmonic Retrieval via Atomic Norm Minimization. IEEE Trans. Signal Process. 2015, 63, 1030–1042. [Google Scholar] [CrossRef]
- Yang, Y.; Chu, Z.G.; Xu, Z.M.; Ping, G.L. Two-dimensional grid-free compressive beamforming. J. Acoust. Soc. Am. 2017, 142, 618–629. [Google Scholar] [CrossRef]
- Wang, X.H.; Wang, Y.H.; Wang, P.; Yang, S.Q.; Niu, W.D.; Yang, Y.A. Design, analysis, and testing of Petrel acoustic autonomous underwater vehicle for marine monitoring. Phys. Fluids 2022, 34, 037115. [Google Scholar] [CrossRef]
- Eldar, Y.C.; Kuppinger, P.; Bolcskei, H. Block-Sparse Signals: Uncertainty Relations and Efficient Recovery. IEEE Trans. Signal Process. 2010, 58, 3042–3054. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.L.; Rao, B.D. Sparse Signal Recovery With Temporally Correlated Source Vectors Using Sparse Bayesian Learning. IEEE J.-Stsp. 2011, 5, 912–926. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.L.; Rao, B.D. Extension of SBL Algorithms for the Recovery of Block Sparse Signals With Intra-Block Correlation. IEEE Trans. Signal Process. 2013, 61, 2009–2015. [Google Scholar] [CrossRef] [Green Version]
- Johnson, D.H.; Dudgeon, D.E. Array Signal Processing—Concepts and Methods; Prentice Hall: Englewood Cliffs, NJ, USA, 2013. [Google Scholar]







| Grid Interval (m) | Separation Ability | Computational Time (s) | Localization Performance | |
|---|---|---|---|---|
| CBF | - | O | 21 | Two source positions are estimated ambiguously. (Low resolution along with the vertical axis) |
| Off-grid BSBL | 0.100 | X | 9 | High resolution. Two sources could not be separated. |
| 0.050 | X | 56 | ||
| 0.025 | O | 2923 | High resolution. Two sources are distinguished. | |
| Pairwise off-grid BSBL | 0.100 | O | 29 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, M.; Memon, S.A.; Kim, G.; Choo, Y. 3D Off-Grid Localization for Adjacent Cavitation Noise Sources Using Bayesian Inference. Sensors 2023, 23, 2628. https://doi.org/10.3390/s23052628
Park M, Memon SA, Kim G, Choo Y. 3D Off-Grid Localization for Adjacent Cavitation Noise Sources Using Bayesian Inference. Sensors. 2023; 23(5):2628. https://doi.org/10.3390/s23052628
Chicago/Turabian StylePark, Minseuk, Sufyan Ali Memon, Geunhwan Kim, and Youngmin Choo. 2023. "3D Off-Grid Localization for Adjacent Cavitation Noise Sources Using Bayesian Inference" Sensors 23, no. 5: 2628. https://doi.org/10.3390/s23052628