
An Optimal Strain Gauge Layout Design for the Measurement of Truss Structures

Abstract
:1. Introduction
2. Formulation
2.1. Displacement Mode Shape-Based Approach
2.2. Strain Mode Shape-Based Approach
3. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Pozo, F.; Tibaduiza, D.A.; Vidal, Y. Sensors for structural health monitoring and condition monitoring. Sensors 2021, 21, 1558. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Wu, X.; Sun, Q.; Zhang, L. Optimal sensor placement for a truss structure using particle swam optimization. Int. J. Acoust. Vib. 2017, 22, 439–447. [Google Scholar]
- Chai, W.; Yang, Y.; Yu, H.; Yang, F.; Yang, Z. optimal sensor placement of bridge structure based on sensitivity-effective independence method. IET Circuits Devices Syst. 2022, 16, 125–135. [Google Scholar] [CrossRef]
- Tobias, D.H.; Foutch, D.H.; Choros, J. Investigation of an Open Deck Through-Truss Railway Bridge: Work Train Tests; Association of American Railroads, Report No. R-830; AAR Research Center: Chicago, IL, USA, 1993. [Google Scholar]
- Meo, M.; Zumpano, G. On the Optimal Sensor Placement Techniques for a Bridge Structure. Eng. Struct. 2005, 27, 1488–1497. [Google Scholar] [CrossRef]
- DelGrego, M.R.; Culmo, M.P.; DeWolf, J.T. Performance Evaluation through Field Testing of Century-Old Railroad Truss Bridge. J. Bridge Eng. 2008, 13, 132–138. [Google Scholar] [CrossRef]
- Al-Emrani, M.; Akesson, B.; Kliger, R. Overlooked Secondary Effects in Open-Deck Truss Bridges. Struct. Eng. Int. 2004, 14, 307–312. [Google Scholar] [CrossRef]
- Penny, J.E.; Friswell, M.I.; Garvey, S.D. Automatic choice of measurement locations for dynamic testing. AIAA J. 1994, 32, 407–414. [Google Scholar] [CrossRef]
- Papadopoulos, M.; Garcia, E. Sensor placement methodologies for dynamic testing. AIAA J. 1998, 36, 256–263. [Google Scholar] [CrossRef]
- Guo, H.Y.; Zhang, L.; Zhang, L.L.; Zhou, J.X. Optimal placement of sensor for structural health monitoring using improved genetic algorithms. Smart Mater. Struct. 2004, 13, 528–534. [Google Scholar] [CrossRef] [Green Version]
- Yu, T.K.; Sein, J.H. Observability and optimal measurement locations in linear distributed parameter systems. Int. J. Control 1973, 18, 785–799. [Google Scholar] [CrossRef]
- Chen, B.; Huang, Z.; Zheng, D.; Zhong, L. A hybrid method of optimal sensor placement for dynamic response monitoring of hydro-structures. Int. J. Distrib. Sens. Netw. 2017, 13, 155014771770772. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, X.; Chen, W.; Hu, K. Optimal sensor placement method considering the importance of structural performance degradation for the allowable loadings for damage identification. Appl. Math. Model 2020, 86, 384–403. [Google Scholar] [CrossRef]
- Tan, Y.; Zhang, L. Computational methodologies for optimal sensor placement in structural health monitoring: A review. Struct. Health Monit. 2020, 19, 1287–1308. [Google Scholar] [CrossRef]
- Blachowski, B.; Ostrowski, M.; Tauzowski, P.; Świerczd, A.; Jankowskie, Ł. Sensor placement for structural damage identification by means of topology optimization. AIP Conf. Proceed. 2020, 2239, 020002. [Google Scholar]
- Kammer, D.C. Sensor placement for on-orbit modal identification and correlation of large space structures. J. Guid. Control Dyn. 1991, 14, 251–259. [Google Scholar] [CrossRef]
- Gomes, G.F.; Almeida, F.A.; Alexandrino, P.S.L.; da Cunha, S.S., Jr.; de Sousa, B.S.; Ancelotti, A.C., Jr. A multiobjective sensor placement optimization for SHM systems considering Fisher information matrix and mode shape interpolation. Eng. Comput. 2019, 35, 519–535. [Google Scholar] [CrossRef]
- Sun, H.; Buyukozturk, O. Optimal sensor placement in structural health monitoring using discrete optimization. Smart Mater. Struct. 2015, 24, 125034. [Google Scholar] [CrossRef] [Green Version]
- Breitfeld, T. A Method for identification of a set of optimal measurement points for experimental modal analysis. Modal Anal. 1996, 11, 1–9. [Google Scholar]
- Cui, F.; Yuan, W.C. Application of optimal sensor placement algorithms for health monitoring of bridges. J. Tongji Univ. 1999, 27, 165–169. [Google Scholar]
- Lu, W.; Teng, J. Optimal placement of sensors based on data fusion. J. Vib. Shock 2009, 28, 52–55. [Google Scholar]
- Chen, W.; Zhao, W.G.; Zhu, H.P.; Chen, J.F. Optimal sensor placement for structural response estimation. J. Cent. South Univ. 2014, 21, 3993–4001. [Google Scholar] [CrossRef]
- Friswell, M.I.; Castro-Triguero, R. Clustering of sensor locations using the effective independence method. AIAA J. 2015, 53, 1388–1390. [Google Scholar] [CrossRef] [Green Version]
- Castro-Triguero, R.; Murugan, S.; Friswell, M.I.; Gallego, R. Optimal sensor placement for structure under parametric uncertainty. Top. Dyn. Bridges 2013, 3, 125–132. [Google Scholar]
- Lu, L.L.; Wang, X.; Huang, C.G. A new method of optimal sensor placement for modal identification of offshore platform structure. In Proceedings of the 2013 World Congress on Advances in Structural Engineering and Mechanics, Jeju Island, Republic of Korea, 8–12 September 2013. [Google Scholar]
- Kammer, D.C.; Peck, J.A. Mass-weighting methods for sensor placement using sensor set expansion techniques. Mech. Syst. Signal Pr. 2008, 22, 1515–1525. [Google Scholar] [CrossRef]
- Yang, C.; Xia, Y. Optimal sensor placement based on dynamic condensation using multi-objective optimization algorithm. Struct. Multidiscip. Optim. 2022, 65, 210. [Google Scholar] [CrossRef]
- Jaya, M.M.; Ceravolo, R.; Matta, E.; Fragonara, L.Z. Performance of sensor placement strategies used in system identification based on modal expansion. In Proceedings of the 9th European Workshop on Structural Health Monitoring, Manchester, UK, 10–13 July 2018. [Google Scholar]
- Liu, S.; Prabhakar, S.; Fardad, M.; Masazade, E.; Leus, G.; Varshney, P.K. Sensor selection for estimation with correlated measurement noise. IEEE Trans. Signal Process. 2016, 64, 3509–3522. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Y.; Li, D.; Song, G. On the physical significance of the effective independence method for sensor placement. In Proceedings of the 12th International Conference on Damage Assessment of Structures, Kitakyushu, Japan, 10–12 July 2017. [Google Scholar]
- He, H.; Xu, H.; Wang, X.; Zhang, X.; Fan, S. Optimal sensor placement for spatial structure based on importance coefficient and randomness. Shock Vib. 2018, 2018, 7540129. [Google Scholar] [CrossRef] [Green Version]
- Xiao, F.; Hulsey, J.L.; Chen, G.S.; Xiang, Y. Optimal static strain sensor placement for truss bridges. Int. J. Distrib. Sens. Netw. 2017, 13, 1550147717707929. [Google Scholar] [CrossRef]
- Song, J.H.; Lee, E.T.; Eun, H.C. Optimal sensor placement through expansion of static strain measurements to static displacements. Int. J. Distrib. Sens. Netw. 2021, 17, 1550147721991712. [Google Scholar] [CrossRef]
- Rucevskis, S.; Rogala, T.; Katunin, A. Optimal sensor placement for modal-based health monitoring of a composite structure. Sensors 2022, 22, 3867. [Google Scholar] [CrossRef]
- Yi, T.; Li, H.; Gu, M. Optimal Sensor Placement for Structural Health Monitoring Based on Multiple Optimization Strategies. Struct. Des. Tall Spec. Build. 2011, 20, 881–900. [Google Scholar] [CrossRef]
- Papadimitriou, C. Optimal Sensor Placement Methodology for Parametric Identification of Structural Systems. J. Sound Vib. 2004, 278, 923–947. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| EI Method | G-EI Method | |
|---|---|---|
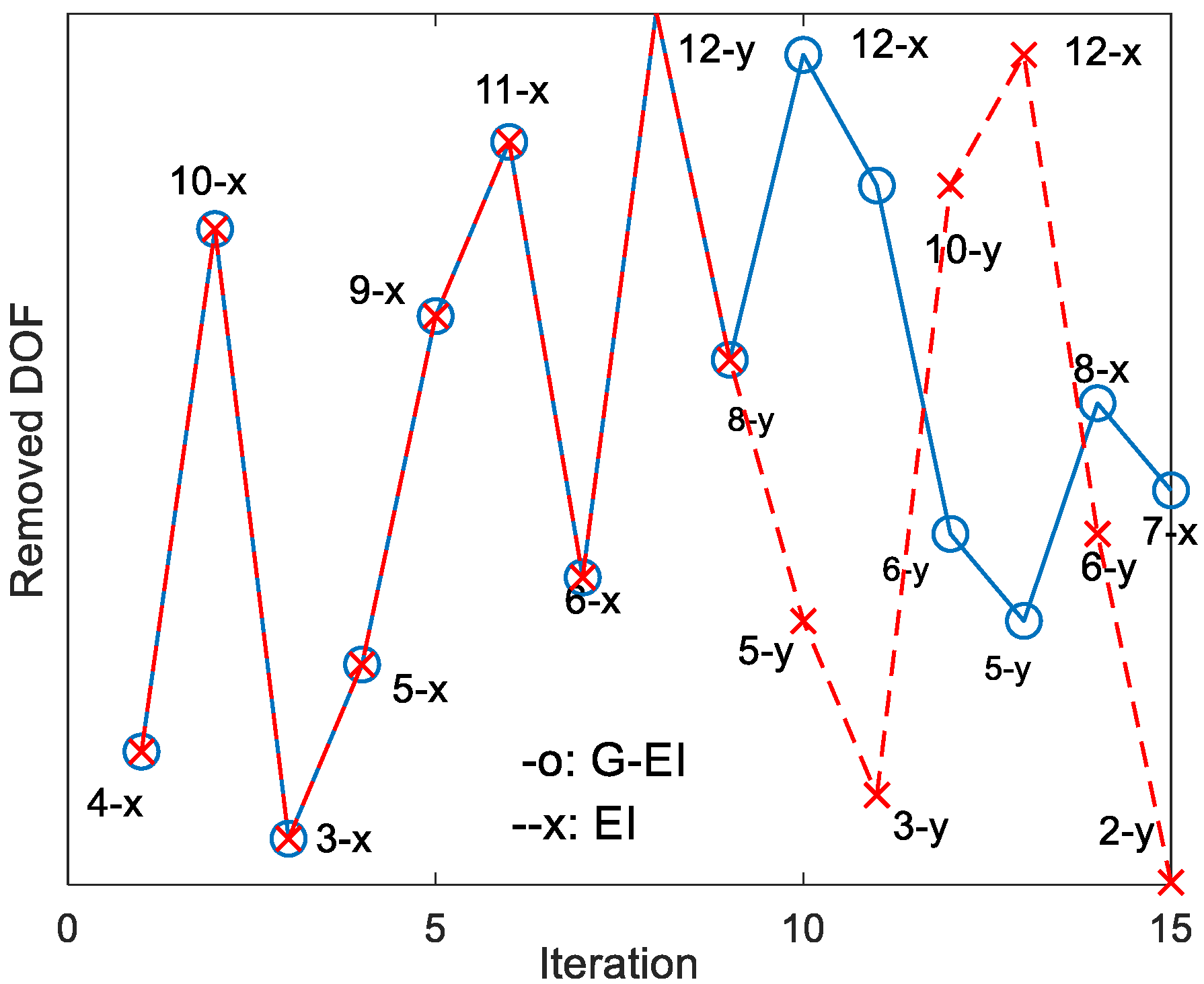
| Final sensor positions | 2-x, 4-y, 7-x, 8-x, 9-y, 11-y | 2-x, 2-y, 3-y, 4-y, 9-y, 11-y |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kyung, J.; Eun, H.-C. An Optimal Strain Gauge Layout Design for the Measurement of Truss Structures. Sensors 2023, 23, 2738. https://doi.org/10.3390/s23052738
Kyung J, Eun H-C. An Optimal Strain Gauge Layout Design for the Measurement of Truss Structures. Sensors. 2023; 23(5):2738. https://doi.org/10.3390/s23052738
Chicago/Turabian StyleKyung, JungHyun, and Hee-Chang Eun. 2023. "An Optimal Strain Gauge Layout Design for the Measurement of Truss Structures" Sensors 23, no. 5: 2738. https://doi.org/10.3390/s23052738