
The Influence of Varying Atmospheric and Space Weather Conditions on the Accuracy of Position Determination


Abstract
:1. Introduction
2. Satellite Systems and Errors in Position Determination
2.1. Satellite Systems Short Introduction
- Global positioning system (GPS) arising from the American Navy Navigation Satellite System (NAVSAT), which was initially used for US Navy submarine positioning and was the first to allow satellite navigation;
- European satellite system—Galileo, a relatively young system, launched in 2016, developed in Europe beginning in the 1980s due to the fear of the inaccessibility of the GPS and GLONASS systems;
- Russian positioning system—GLONASS;
- Chinese satellite system—BeiDou.
2.2. Errors in Position Determination
- Ephemeris errors—satellite position errors, basically, the difference between their real and identified positions; they are caused by the Earth’s gravitational field, atmospheric drag, the gravitational effects of the Sun, Moon, and other celestial bodies, solar radiation, crustal tides, oceanic tides, electromagnetic forces, and relativistic effects; the error caused by the ephemeris can be about 2 m, but can be reduced;
- Inaccuracy of the time standard—position determination is mainly related to the measurement of the time, in which the signal reaches the receiver from the satellite; since the speed of wave propagation in vacuum is 300,000 km/s, it is important to know the propagation time of the signal, because a small deviation of the time can cause errors of several meters;
- Signal multipath—multipath errors are related to secondary wave inference; the phenomenon occurs when the satellite signal does not reach the receiver directly, but through various paths due to reflections from all kinds of objects standing in the way of the signal; in particular, the phenomenon of multipathing can be seen in large cities, where big buildings are present in high numbers, and when the satellites are low on the horizon;
- Variation of the antenna phase center—this error appears when the physical center is not compatible with the phase center of the receiver’s antenna; the phase center is constantly changing; due to the constant change in the height and azimuth of the satellites, the angle of signal transmission also changes; deviations caused by this phenomenon are generally small and the newer the antenna, the smaller the deviation, up to several millimeters;
- Receiver’s noise—noise is nothing different then a voltage peak of random frequency and amplitude, generated on current-carrying elements; the satellite receiver itself is a source of unwanted noise; noise affects accuracy and cannot be eliminated;
- Geometric errors of the satellite alignment—this type of error is affected by the satellites’ position versus the receiver; the error is described by dilution of precision (DOP)—a parameter characterizing the influence of satellite constellation geometry on positioning; if any of the coefficients are equal to zero, it means that the measurement is impossible due to interference, weak signal from the satellites, or too few visible satellites;
- Errors in the design of the satellite system—satellites’ location has a significant impact on their visibility to the receiver; four visible satellites are indispensable for positioning, however, this is the minimum vital number and may cause positioning errors;
- Errors related to the Earth’s atmosphere (which are discussed hereinafter).
3. Satellite Signal Measurements in Various Weather Conditions
3.1. Measurements, Data Conversion Techniques
- Data aggregation, geographic coordinates determination at each measurement point;
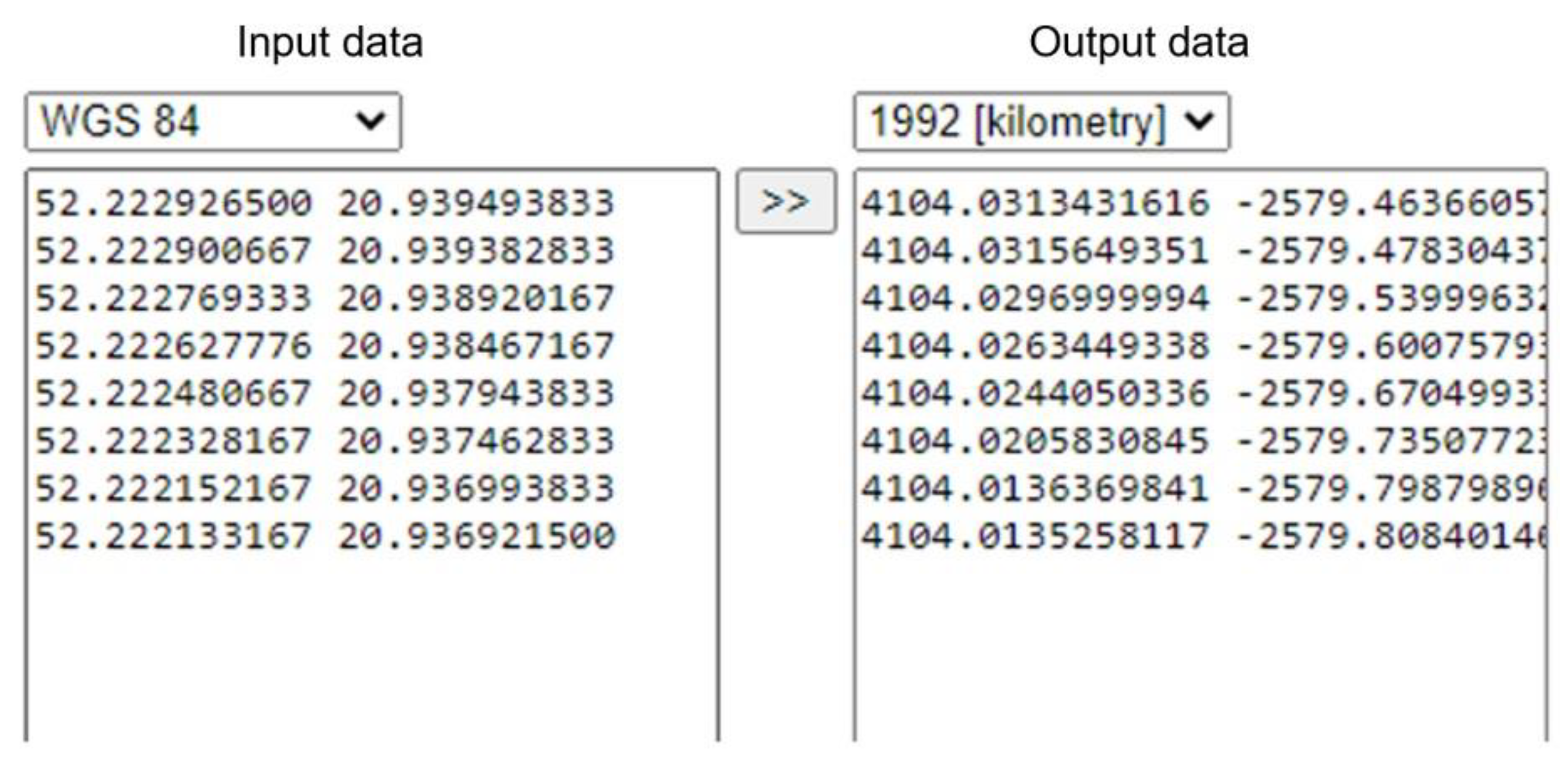
- Conversion of coordinates from World Geodetic System-84 (WGS-84) to flat Coordinate System 1992;
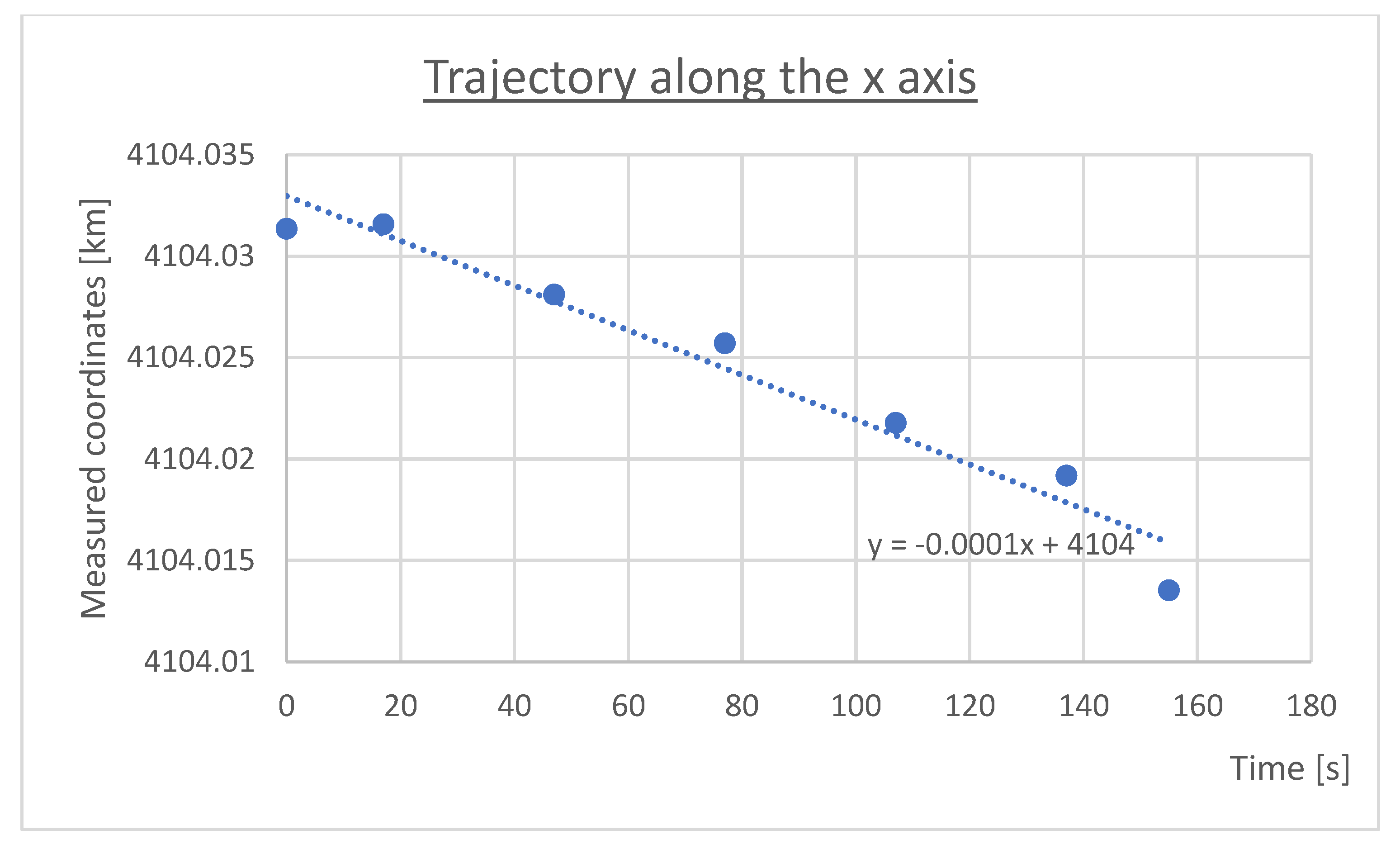
- Calculation of the traveled trajectory in two directions: north–south, east–west, trend line, and its mathematical equation setting;
- Determination of the arithmetic mean (in each direction), as well as the standard deviation;
- Analysis, repetition of the procedure for subsequent measurements.
3.2. Changing Weather Conditions during the Measurements
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Krzykowska, K.; Siergiejczyk, M.; Rosiński, A. Influence of selected external factors on satellite navigation signal quality. In Safety and Reliability—Safe Societies; Haugen, S., Barros, A., van Gulik, C., Kongsvik, T., Vinnem, J.E., Eds.; Taylor & Francis Group: London, UK, 2018; pp. 701–705. [Google Scholar] [CrossRef]
- Siergiejczyk, M.; Rosiński, A.; Krzykowska, K. Reliability assessment of supporting satellite system EGNOS. In New Results in Dependability and Computer Systems; Zamojski, W., Mazurkiewicz, J., Sugier, J., Walkowiak, T., Kacprzyk, J., Eds.; Springer: Cham, Switzerland, 2013; Volume 224, pp. 353–364. [Google Scholar] [CrossRef]
- Li, X.; Huang, J.; Li, X.; Shen, Z.; Han, J.; Li, L.; Wang, B. Review of PPP–RTK: Achievements, challenges, and opportunities. Satell. Navig. 2022, 3, 28. [Google Scholar] [CrossRef]
- Krzykowska-Piotrowska, K.; Dudek, E.; Siergiejczyk, M.; Rosiński, A.; Wawrzyński, W. Is Secure Communication in the R2I (Robot-to-Infrastructure) Model Possible? Identification of Threats. Energies 2021, 14, 4702. [Google Scholar] [CrossRef]
- Krzykowska-Piotrowska, K.; Siergiejczyk, M. On the Navigation, Positioning and Wireless Communication of the Companion Robot in Outdoor Conditions. Energies 2022, 15, 4936. [Google Scholar] [CrossRef]
- Siva, J.; Poellabauer, C. Robot and Drone Localization in GPS-Denied Areas. In Mission-Oriented Sensor Networks and Systems: Art and Science; Ammari, H., Ed.; Springer: Cham, Switzerland, 2019; pp. 597–631. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A.; Ševčovič, M.; Tóth, J.; Lakatos, A. Visual Communication in Shared Mobility Systems as an Opportunity for Recognition and Competitiveness in Smart Cities. Smart Cities 2022, 5, 802–818. [Google Scholar] [CrossRef]
- Siergiejczyk, M.; Krzykowska, K.; Rosiński, A.; Grieco, L.A. Reliability and Viewpoints of Selected ITS System. In Proceedings of the 25th International Conference on Systems Engineering ICSEng 2017, Las Vegas, NV, USA, 22–24 August 2017. [Google Scholar] [CrossRef]
- Kołodziejska, A.; Krzykowska, K.; Siergiejczyk, M. Comparative Analysis of V2V and A2A Technologies. J. KONBiN 2018, 45, 345–364. [Google Scholar] [CrossRef] [Green Version]
- Dudek, E.; Kozłowski, M. Analysis of aeronautical information potential incompatibility—Case study. J. KONBiN 2017, 41, 59–82. [Google Scholar] [CrossRef] [Green Version]
- Gołębiowski, P.; Jacyna, M.; Stańczak, A. The Assessment of Energy Efficiency versus Planning of Rail Freight Traffic: A Case Study on the Example of Poland. Energies 2021, 14, 5629. [Google Scholar] [CrossRef]
- Borucka, A.; Pyza, D. Influence of meteorological conditions on road accidents. A model for observations with excess zeros. Eksploatacja i Niezawodność 2021, 23, 586–592. [Google Scholar] [CrossRef]
- Rychlicki, M.; Kasprzyk, Z.; Rosiński, A. Analysis of Accuracy and Reliability of Different Types of GPS Receivers. Sensors 2020, 20, 6498. [Google Scholar] [CrossRef]
- Paś, J.; Buchla, S. Exploitation of electronic devices—Selected issues. J. KONBiN 2019, 49, 125–142. [Google Scholar] [CrossRef] [Green Version]
- Żyluk, A.; Kuźma, K.; Grzesik, N.; Zieja, M.; Tomaszewska, J. Fuzzy Logic in Aircraft Onboard Systems Reliability Evaluation—A New Approach. Sensors 2021, 21, 7913. [Google Scholar] [CrossRef]
- Klimczak, T.; Paś, J. Selected issues of the reliability and operational assessment of a fire alarm system. Eksploatacja i Niezawodność—Maint. Reliab. 2019, 21, 553–561. [Google Scholar] [CrossRef]
- Paś, J.; Rosiński, A.; Białek, K. A reliability-operational analysis of a track-side CCTV cabinet taking into account interference. Bull. Pol. Acad. Sci. Tech. Sci. 2021, 69, e136747. [Google Scholar] [CrossRef]
- Grabski, F. Semi-Markov Processes: Applications in System Reliability and Maintenance; Elsevier: Amsterdam, The Netherlands, 2015. [Google Scholar] [CrossRef]
- Duer, S.; Duer, R.; Mazuru, S. Determination of the expert knowledge base on the basis of a functional and diagnostic analysis of a technical object. Nonconv. Technol. Rev. 2016, 20, 23–29. Available online: http://revtn.ro/index.php/revtn/article/view/115/76 (accessed on 12 January 2023).
- Oszczypała, M.; Ziółkowski, J.; Małachowski, J. Analysis of Light Utility Vehicle Readiness in Military Transportation Systems Using Markov and Semi-Markov Processes. Energies 2022, 15, 5062. [Google Scholar] [CrossRef]
- Ziółkowski, J.; Małachowski, J.; Oszczypała, M.; Szkutnik-Rogoż, J.; Lęgas, A. Modelling of the Military Helicopter Operation Process in Terms of Readiness. Def. Sci. J. 2021, 71, 602–611. [Google Scholar] [CrossRef]
- Paś, J.; Rosiński, A.; Wetoszka, P.; Białek, K.; Klimczak, T.; Siergiejczyk, M. Assessment of the Impact of Emitted Radiated Interference Generated by a Selected Rail Traction Unit on the Operating Process of Trackside Video Monitoring Systems. Electronics 2022, 11, 2554. [Google Scholar] [CrossRef]
- Stawowy, M.; Olchowik, W.; Rosiński, A.; Dąbrowski, T. The Analysis and Modelling of the Quality of Information Acquired from Weather Station Sensors. Remote Sens. 2021, 13, 693. [Google Scholar] [CrossRef]
- Zhang, Z.; Lou, Y.; Zhang, W.; Wang, Z.; Zhou, Y.; Bai, I.; Zhang, Z.; Shi, C. Dynamic stochastic model for estimating GNSS tropospheric delays from air-borne platforms. GPS Solut. 2023, 27, 39. [Google Scholar] [CrossRef]
- Hadavi, S.; Verlinde, S.; Verbeke, W.; Macharis, C.; Guns, T. Monitoring Urban-Freight Transport Based on GPS Trajectories of Heavy-Goods Vehicles. IEEE Trans. Intell. Transp. Syst. 2018, 20, 3747–3758. [Google Scholar] [CrossRef]
- Wawrzyński, W.; Zieja, M.; Tomaszewska, J.; Michalski, M.; Kamiński, G.; Wabik, D. The Potential Impact of Laser Pointers on Aviation Safety. Energies 2022, 15, 6226. [Google Scholar] [CrossRef]
- Wawrzyński, W.; Zieja, M.; Tomaszewska, J.; Michalski, M. Reliability Assessment of Aircraft Commutators. Energies 2021, 14, 7404. [Google Scholar] [CrossRef]
- Kim, J.; Park, M.; Bae, Y.; Kim, O.-J.; Kim, D.; Kim, B.; Kee, C. A Low-Cost, High-Precision Vehicle Navigation System for Deep Urban Multipath Environment Using TDCP Measurements. Sensors 2020, 20, 3254. [Google Scholar] [CrossRef] [PubMed]
- Wu, Y.; Wang, J.; Yang, Z.; Yang, L.; Sun, G. Reliability and Separability Analysis of Integrated GPS/BDS System. In China Satellite Navigation Conference (CSNC) 2016 Proceedings, Changsha, China, 18–20 May; Springer: Singapore, 2016; pp. 165–175. [Google Scholar] [CrossRef]
- Bridgelall, R.; Tolliver, D. Accuracy Enhancement of Anomaly Localization with Participatory Sensing Vehicles. Sensors 2020, 20, 409. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Li, X.; Ge, M.; Dai, X.; Ren, X.; Fritsche, M.; Wickert, J.; Schuh, H. Accuracy and reliability of multi-GNSS real-time precise positioning: GPS, GLONASS, BeiDou, and Galileo. J. Geod. 2015, 89, 607–635. [Google Scholar] [CrossRef] [Green Version]
- Li, N.; Zhao, L.; Li, L.; Jia, C. Integrity monitoring of high-accuracy GNSS-based attitude determination. GPS Solut. 2018, 22, 120. [Google Scholar] [CrossRef]
- Hsu, L.T.; Gu, Y.; Kamijo, S. 3D Building Model-Based Pedestrian Positioning Method Using GPS/GLONASS/QZSS and its Reliability Calculation. GPS Solut. 2016, 20, 413–428. [Google Scholar] [CrossRef]
- Krzykowska, K.; Krzykowski, M. Forecasting Parameters of Satellite Navigation Signal through Artificial Neural Networks for the Purpose of Civil Aviation. Int. J. Aerosp. Eng. 2019, 2019, 7632958. [Google Scholar] [CrossRef]
- Krzykowska-Piotrowska, K.; Dudek, E.; Wielgosz, P.; Milanowska, B.; Batalla, J.M. On the Correlation of Solar Activity and Troposphere on the GNSS/EGNOS Integrity. Fuzzy Logic Approach. Energies 2021, 14, 4534. [Google Scholar] [CrossRef]
- Guo, J.; Chen, G.; Zhao, Q.; Liu, J.; Liu, X. Comparison of solar radiation pressure models for BDS IGSO and MEO satellites with emphasis on improving orbit quality. GPS Solut. 2017, 21, 511–522. [Google Scholar] [CrossRef] [Green Version]
- Sreeja, V. Impact and mitigation of space weather effects on GNSS receiver performance. Geosci. Lett. 2016, 3, 24. [Google Scholar] [CrossRef] [Green Version]
- Osei-Poku, L.; Tang, L.; Chen, W.; Chen, M.; Acheampong, A.A. Comparative Study of Predominantly Daytime and Nighttime Lightning Occurrences and Their Impact on Ionospheric Disturbances. Remote Sens. 2022, 14, 3209. [Google Scholar] [CrossRef]
- Ogwala, A.; Oyedokun, O.J.; Ogunmodimu, O.; Akala, A.O.; Ali, M.A.; Jamjareegulgarn, P.; Panda, S.K. Longitudinal Variations in Equatorial Ionospheric TEC from GPS, Global Ionosphere Map and International Reference Ionosphere-2016 during the Descending and Minimum Phases of Solar Cycle 24. Universe 2022, 8, 575. [Google Scholar] [CrossRef]
- Li, M.; Xu, T.; Ge, H.; Guan, M.; Yang, H.; Fang, Z.; Gao, F. LEO-Constellation-Augmented BDS Precise Orbit Determination Considering Spaceborne Observational Errors. Remote Sens. 2021, 13, 3189. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhu, Y.; Chen, Z. An In-Depth Assessment of the New BDS-3 B1C and B2a Signals. Remote Sens. 2021, 13, 788. [Google Scholar] [CrossRef]
- Li, B.; Ge, H.; Ge, M.; Nie, L.; Shen, Y.; Schuh, H. LEO enhanced Global Navigation Satellite System (LeGNSS) for real-time precise positioning services. Adv. Space Res. 2019, 63, 73–93. [Google Scholar] [CrossRef]
- Fernandes, R.; Bruyninx, C.; Crocker, P.; Menut, J.-L.; Socquet, A.; Vergnolle, M.; Avallone, A.; Bos, M.; Bruni, S.; Cardoso, R.; et al. A new European service to share GNSS Data and Products. Ann. Geophys. 2023, 65, DM317. [Google Scholar] [CrossRef]
- Śliwińska, J.; Nastula, J.; Wińska, M. Evaluation of hydrological and cryospheric angular momentum estimates based on GRACE, GRACE-FO and SLR data for their contributions to polar motion excitation. Earth Planets Space 2021, 73, 71. [Google Scholar] [CrossRef]
- Dudek, E.; Krzykowska-Piotrowska, K. Does Free Route Implementation Influence Air Traffic Management System? Case Study in Poland. Sensors 2021, 21, 1422. [Google Scholar] [CrossRef]
- Krzykowska-Piotrowska, K. Forecasting Satellite Navigation Signal in Civil Aviation; Publishing House of the Warsaw University of Technology: Warsaw, Poland, 2020. [Google Scholar]
- Dudoit, A.; Rimša, V.; Bogdevičius, M.; Skorupski, J. Effectiveness of Conflict Resolution Methods in Air Traffic Management. Aerospace 2022, 9, 112. [Google Scholar] [CrossRef]
- Kwasiborska, A.; Skorupski, J. Assessment of the Method of Merging Landing Aircraft Streams in the Context of Fuel Consumption in the Airspace. Sustainability 2021, 13, 12859. [Google Scholar] [CrossRef]
- Kaleta, W.; Skorupski, J. A fuzzy inference approach to analysis of LPV-200 procedures influence on air traffic safety. Transp. Res. Part C: Emerg. Technol. 2019, 106, 264–280. [Google Scholar] [CrossRef]
- Krasuski, K.; Ćwiklak, J.; Bakuła, M.; Mrozik, M. Analysis of the Determination of the Accuracy Parameter for Dual Receivers Based on EGNOS Solution in Aerial Navigation. Acta Mechanica Automatica 2022, 16, 365–372. [Google Scholar] [CrossRef]
- Krasuski, K.; Mrozik, M.; Wierzbicki, D.; Ćwiklak, J.; Kozuba, J.; Ciećko, A. Designation of the Quality of EGNOS+SDCM Satellite Positioning in the Approach to Landing Procedure. Appl. Sci. 2022, 12, 1335. [Google Scholar] [CrossRef]
- Krasuski, K.; Popielarczyk, D.; Ciećko, A.; Ćwiklak, J. A New Strategy for Improving the Accuracy of Aircraft Positioning Using DGPS Technique in Aerial Navigation. Energies 2021, 14, 4431. [Google Scholar] [CrossRef]
- Kędziorek, P.; Kasprzyk, Z.; Rychlicki, M.; Rosiński, A. Analysis and Evaluation of Methods Used in Measuring the Intensity of Bicycle Traffic. Energies 2023, 16, 752. [Google Scholar] [CrossRef]
- Groves, P. Principles of GNSS, Inertial, and Multisensor Integrated Navigation Systems; Artech House: New York, NY, USA, 2013. [Google Scholar]
- Krasuski, K. Estimation Troposphere Delay Parameters for GNSS Reference Station. Pomiary Automatyka Robotyka 2016, 20, 75–82. [Google Scholar] [CrossRef] [Green Version]
- Ciećko, A.; Grunwald, G. Klobuchar, NeQuick G, and EGNOS Ionospheric Models for GPS/EGNOS Single-Frequency Positioning under 6–12 September 2017 Space Weather Events. Appl. Sci. 2020, 10, 1553. [Google Scholar] [CrossRef] [Green Version]
- Available online: www.spaceweatherlive.com (accessed on 14 March 2022).
- Available online: www.u-blox.com (accessed on 19 August 2021).
- Available online: http://www.karto.pl/narzedzia/wspolrzedne (accessed on 5 January 2023).
- Dziubiński, I.; Świątkowski, T. A Math Guide. Volume 1 and 2; PWN: Warsaw, Poland, 1982. [Google Scholar]
- Available online: www.nasa.gov (accessed on 19 December 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time [s] | y [km] | x [km] |
|---|---|---|
| 0 | −2579,463661 | 4104,031343 |
| 17 | −2579,510050 | 4104,031565 |
| 47 | −2579,576051 | 4104,028103 |
| 77 | −2579,640251 | 4104,025706 |
| 107 | −2579,706555 | 4104,021771 |
| 137 | −2579,772036 | 4104,019176 |
| 155 | −2579,808401 | 4104,013526 |
| Time [s] | y [km] | x [km] | y2 [km] | x2 [km] |
|---|---|---|---|---|
| 0 | −2579,463661 | 4104,031343 | −2579,5000 | 4091,687906 |
| 17 | −2579,510050 | 4104,031565 | −2579,5374 | 4091,687905 |
| 47 | −2579,576051 | 4104,028103 | −2579,6034 | 4091,687916 |
| 77 | −2579,640251 | 4104,025706 | −2579,6694 | 4091,687923 |
| 107 | −2579,706555 | 4104,021771 | −2579,7354 | 4091,687935 |
| 137 | −2579,772036 | 4104,019176 | −2579,8014 | 4091,687942 |
| 155 | −2579,808401 | 4104,013526 | −2579,8410 | 4091,687959 |
| Time [s] | y [km] | x [km] | y2 [km] | x2 [km] |
|---|---|---|---|---|
| 0 | −2579,463661 | 4104,031343 | −2579,5000 | 4091,687906 |
| 17 | −2579,510050 | 4104,031565 | −2579,5374 | 4091,687905 |
| 47 | −2579,576051 | 4104,028103 | −2579,6034 | 4091,687916 |
| 77 | −2579,640251 | 4104,025706 | −2579,6694 | 4091,687923 |
| 107 | −2579,706555 | 4104,021771 | −2579,7354 | 4091,687935 |
| 137 | −2579,772036 | 4104,019176 | −2579,8014 | 4091,687942 |
| 155 | −2579,808401 | 4104,013526 | −2579,8410 | 4091,687959 |
| Arithmetic mean [km] | −2579,639572 | 4104,024456 | −2579,669714 | 4091,687927 |
| Average deviation [km] | 0.092238622 | 0.00472354 | 0.092164286 | 0.0000141706205454284 |
| Deviation difference along Y axis [km] | 0.000074336 | deviation difference along X axis [km] | 0.00470937 |
| Measurement Number | Deviation Difference along Y axis [km] | Deviation Difference along X axis [km] |
|---|---|---|
| 1 | 0.000074336 | 0.00470937 |
| 2 | 0.00373305 | 0.01089750 |
| 3 | 0.00550258 | 0.01107862 |
| 4 | 0.00330949 | 0.03411303 |
| 5 | 0.00006751 | 0.00022016 |
| 6 | - | - |
| 7 | 0.01865231 | 0.00090735 |
| 8 | - | - |
| 9 | 0.00963509 | 0.00039513 |
| 10 | 0.00526347 | 0.00680266 |
| 11 | 0.00311555 | 0.00065142 |
| 12 | 0.01557693 | 0.01631348 |
| 13 | 0.01220545 | 0.00423828 |
| 14 | - | - |
| 15 | 0.00034146 | 0.00012886 |
| 16 | 0.00041352 | 0.00008695 |
| 17 | 0.00022089 | 0.00190523 |
| 18 | 0.02027631 | 0.00084854 |
| 19 | 0.00306734 | 0.00095147 |
| 20 | 0.00499201 | 0.00350703 |
| No | Daytime | Temp. [°C] | Pressure [hPa] | Humidity [%] | Wind [m/s] | Satellite Systems | Solar Flares [57] |
|---|---|---|---|---|---|---|---|
| 1 | Afternoon | 12 | 997.6 | 58 | 3.61 | All | B9.5 G2 |
| 2 | Afternoon | 11 | 1002.9 | 68 | 3.33 | All | C1.3 Kp3+ |
| 3 | Forenoon | 8 | 1008.4 | 77 | 2.78 | All | C2.2 Kp2+ |
| 4 | Forenoon | 10.2 | 1005.8 | 83.5 | 5.83 | GPS | B1.6 Kp3 |
| 5 | Evening | 7 | 1007.3 | 92 | 2 | GPS | B1.6 Kp3 |
| 6 | Evening | 8.5 | 1010.5 | 92.5 | 3.2 | Galileo | B4.8 Kp2+ |
| 7 | Evening | 3 | 1013.5 | 96.8 | 2.3 | All | B6.3 Kp2− |
| 8 | Forenoon | 3.5 | 1018 | 97.13 | 2.1 | Galileo | B6.2 Kp2− |
| 9 | Evening | 3 | 1017.9 | 97 | 0.65 | Glonass BeiDou | B6.2 Kp2− |
| 10 | Night | 4 | 1008.6 | 91 | 2 | All | C8.5 Kp2+ |
| 11 | Evening | 7.5 | 1005.3 | 85.1 | 1.8 | Without BeiDou | M1.5 Kp1+ |
| 12 | Noon | 15 | 1005.2 | 55.4 | 3.8 | Without Galileo | M1.5 Kp1+ |
| 13 | Night | 12 | 1001.6 | 70 | 3.5 | Glonass | C3.9 Kp4- |
| 14 | Morning | 10 | 1003.95 | 80 | 2.4 | Galileo | C3.2 Kp4 |
| 15 | Evening | 6.1 | 996.36 | 97.1 | 1.8 | All | C5.3 G2 |
| 16 | Forenoon | 9.2 | 1010.8 | 87.2 | 5.2 | Without Galileo | C1.7 Kp4 |
| 17 | Night | 8.5 | 1009.5 | 82.3 | 4.8 | All | C1.7 Kp4 |
| 18 | Morning | 5.2 | 1008.2 | 96.99 | 2.1 | All | M1.5 Kp1+ |
| 19 | Evening | 15 | 999.2 | 95.6 | 0.8 | All | C7.4 Kp4+ |
| 20 | Evening | 15 | 999.2 | 95.6 | 0.8 | All | C7.4 Kp4+ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nowakowski, M.; Dudek, E.; Rosiński, A. The Influence of Varying Atmospheric and Space Weather Conditions on the Accuracy of Position Determination. Sensors 2023, 23, 2814. https://doi.org/10.3390/s23052814
Nowakowski M, Dudek E, Rosiński A. The Influence of Varying Atmospheric and Space Weather Conditions on the Accuracy of Position Determination. Sensors. 2023; 23(5):2814. https://doi.org/10.3390/s23052814
Chicago/Turabian StyleNowakowski, Maciej, Ewa Dudek, and Adam Rosiński. 2023. "The Influence of Varying Atmospheric and Space Weather Conditions on the Accuracy of Position Determination" Sensors 23, no. 5: 2814. https://doi.org/10.3390/s23052814