
Testing and Evaluation of Wi-Fi RTT Ranging Technology for Personal Mobility Applications

 ,
, 
Abstract
:1. Introduction
- (i)
- Provides an extensive experimental evaluation of Wi-Fi RTT ranging under various conditions and device settings, suggesting optimal setups at certain scenarios;
- (ii)
- Investigates and suggests alternative range correction models for removing Wi-Fi RTT biases while explores the use of different mobile devices as initiators;
- (iii)
- Analyzes and compares the proposed correction models, as well as the use of different device types concerning their effect on ranging accuracy, and by extension on position fix error.
2. Smartphone-Based Indoor Localization
2.1. Technologies and Techniques
2.1.1. Types of Sensors
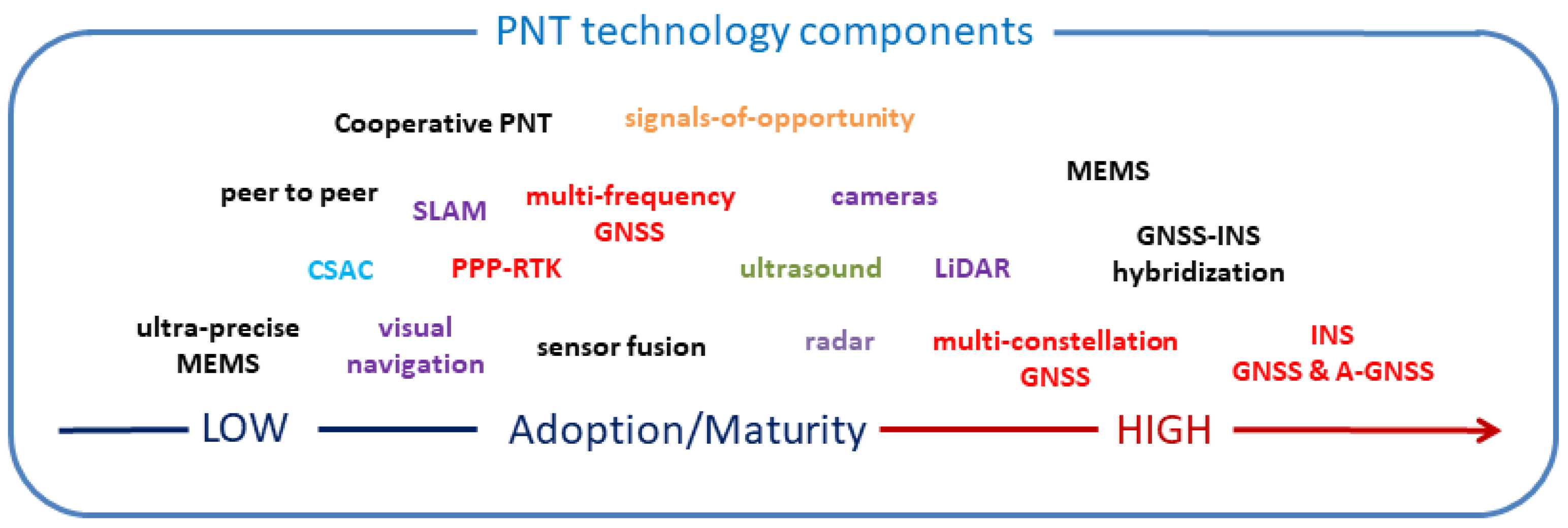
2.1.2. State of Maturity and Adoption
2.1.3. Inertial Navigation Philosophy Shift
2.1.4. Usage of Raw Sensor Measurements and Data
2.2. Requirements and Capabilities
2.2.1. User Requirements
- Accuracy is obtained thanks to multi-constellation, multi-frequency GNSSs, augmented by PPP–RTK services and hybridized with INS and other sensors;
- Ubiquity is provided by complementary positioning technologies and sensors;
- Security is provided by the combination of independent redundant technologies, cyber-security and authentication;
- Connectivity relies on the integration with both satellites and terrestrial networks, such as the mobile 5G networks, LEO (low-Earth orbit) satellites or LPWANs (low-power wide-area networks).
2.2.2. Smartphone-Based Localization Capabilities
2.3. Localization Using Wi-Fi
2.4. Wi-Fi Round Trip Time (RTT)
2.4.1. Operational Principle
- The ISTA sends an FTM request to the RSTA;
- The RSTA receives the request and returns an acknowledgment (ACK) signal to the ISTA;
- Then, several FTM feedbacks are sent from the RSTA to the ISTA;
- Then, the mean RTT measurement is used for range calculation.
2.4.2. Potential and Limitations
3. Assessment Methodology
3.1. Operational Aspects and Environmental Concerns
3.2. Wi-Fi RTT Ranging Scenarios
3.3. Correction Models
3.3.1. Bias Removal
3.3.2. The Linear Correction Model
3.4. Alternate Correction Approaches
3.4.1. User Orientation Correction Model
3.4.2. Multi-Orientation RSSI-Based Correction Model Selection
3.4.3. Mean Linear Correction Model Selection
4. Data Collection Scenarios and Field Tests
4.1. Test Area and Equipment
4.1.1. Test Area
4.1.2. Test Equipment
4.2. Test Scenarios Design
4.2.1. Sampling Rate
4.2.2. 1D Ranging Tests
4.2.3. 2D Ranging Tests
5. Analysis and Results
5.1. 1D Ranging Tests
5.2. 2D Ranging Tests
6. Discussion and Conclusions
6.1. Evaluation and Assessment
6.2. Toward Pedestrian Localization—Future Steps
6.3. Use Case Characteristics Affecting Solution Selection
6.4. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Gikas, V.; Perakis, H. Rigorous Performance Evaluation of Smartphone GNSS/IMU Sensors for ITS Applications. Sensors 2016, 16, 1240. [Google Scholar] [CrossRef]
- Zidan, J.; Adegoke, E.I.; Kampert, E.; Birrell, S.A.; Ford, C.R.; Higgins, M.D. GNSS Vulnerabilities and Existing Solutions: A Review of the Literature. IEEE Access 2021, 9, 153960–153976. [Google Scholar] [CrossRef]
- Hamza, V.; Stopar, B.; Sterle, O. Testing the Performance of Multi-Frequency Low-Cost GNSS Receivers and Antennas. Sensors 2021, 21, 2029. [Google Scholar] [CrossRef] [PubMed]
- Correa, A.; Barcelo, M.; Morell, A.; Vicario, J.L. A Review of Pedestrian Indoor Positioning Systems for Mass Market Applications. Sensors 2017, 17, 1927. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Papathanasopoulou, V.; Spyropoulou, I.; Perakis, H.; Gikas, V.; Andrikopoulou, E. A Data-Driven Model for Pedestrian Behavior Classification and Trajectory Prediction. IEEE Open J. Intell. Transp. Syst. 2022, 3, 328–339. [Google Scholar] [CrossRef]
- Ehrlich, C.R.; Blankenbach, J. Indoor localization for pedestrians with real-time capability using multi-sensor smartphones. Geo-Spat. Inf. Sci. 2019, 22, 73–88. [Google Scholar] [CrossRef] [Green Version]
- Gjøvåg, C.W. WiFi RTT for Indoor Localization using Google WiFi and Google Pixel 3a. Master’s Thesis, NTNU, Trondheim, Norway, 2020. [Google Scholar]
- Bai, Y.B.; Kealy, A.; Retscher, G.; Hoden, L. A Comparative Evaluation of Wi-Fi RTT and GPS Based Positioning. In Proceedings of the International Global Navigation Satellite Systems IGNSS 2020 Conference, Sydney, Australia, 5–7 February 2020; pp. 5–7. [Google Scholar]
- Subedi, S.; Pyun, J.Y. A Survey of Smartphone-Based Indoor Positioning System Using RF-Based Wireless Technologies. Sensors 2020, 20, 7230. [Google Scholar] [CrossRef] [PubMed]
- Nguyen, K.A.; Luo, Z.; Li, G.; Watkins, C. A review of smartphones-based indoor positioning: Challenges and applications. IET Cyber-Syst. Robot. 2021, 3, 1–30. [Google Scholar] [CrossRef]
- Liu, F.; Liu, J.; Yin, Y.; Wang, W.; Hu, D.; Chen, P.; Niu, Q. Survey on WiFi-based indoor positioning techniques. IET Commun. 2020, 14, 1372–1383. [Google Scholar] [CrossRef]
- Perakis, H.; Gikas, V. Towards collaborative multi-agent positioning based on combined Wi-Fi RTT/UWB/IMU measurements. In Proceedings of the IAG 2nd International Symposium of Commission 4: Positioning and Applications, Potsdam, Germany, 5–8 September 2022. [Google Scholar] [CrossRef]
- Want, R.; Wang, W.; Chesnutt, S. Accurate Indoor Location for the IoT. Computer 2018, 51, 66–70. [Google Scholar] [CrossRef]
- Van Diggelen, F.; Want, R.; Wang, W. How to Achieve 1-Meter Accuracy in Android. GPS World, 3 July 2018. [Google Scholar]
- Garcia-Fernandez, M.; Hoyas-Ester, I.; Lopez-Cruces, A.; Siutkowska, M.; Banqué-Casanovas, X. Accuracy in WiFi Access Point Position Estimation Using Round Trip Time. Sensors 2021, 21, 3828. [Google Scholar] [CrossRef] [PubMed]
- Xu, S.; Wang, Y.; Si, M. A Two-Step Fusion Method of Wi-Fi FTM for Indoor Positioning. Sensors 2022, 22, 3593. [Google Scholar] [CrossRef] [PubMed]
- Schepers, D.; Ranganathan, A. Privacy-Preserving Positioning in Wi-Fi Fine Timing Measurement. Proc. Priv. Enhancing Technol. 2022, 2022, 325–343. [Google Scholar] [CrossRef]
- Choi, J. Enhanced Wi-Fi RTT Ranging: A Sensor-Aided Learning Approach. IEEE Trans. Veh. Technol. 2022, 71, 4428–4437. [Google Scholar] [CrossRef]
- Gentner, C.; Ulmschneider, M.; Kuehner, I.; Dammann, A. WiFi-RTT Indoor Positioning. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 1029–1035. [Google Scholar] [CrossRef]
- Perakis, H.; Orfanos, M.; Stratakos, I.; Gikas, V.; Albanopoulos, C. Towards a prototype low-cost/multi-RF based positioning system for underground marble quarry management: Design considerations and preliminary results. In Proceedings of the FIG Congress 2022, Warsaw, Poland, 11–15 September 2022. [Google Scholar]
- Perakis, H.; Gikas, V. Evaluation of Range Error Calibration Models for Indoor UWB Positioning Applications. In Proceedings of the 2018 International Conference on Indoor Positioning and Indoor Navigation IPIN 2018, Nantes, France, 24–27 September 2018. [Google Scholar]
- Retscher, G.; Gikas, V.; Perakis, H.; Hofer, H.; Kealy, A. Evaluation of UWB and Wi-Fi Cooperative Localization Performance in Indoor Environments. In Proceedings of the 27th IUGG General Assembly, Montreal, QC, Canada, 8–18 July 2019. [Google Scholar]
- Gabela, J.; Retscher, G.; Goel, S.; Perakis, H.; Masiero, A.; Toth, C.; Gikas, V.; Kealy, A.; Koppanyi, Z.; Błaszczak-Bąk, W.; et al. Experimental Evaluation of a UWB based Cooperative Positioning System for Pedestrians in GNSS Denied Environment. Sensors 2019, 19, 5274. [Google Scholar] [CrossRef] [Green Version]
- Horn, B. Doubling the Accuracy of Indoor Positioning: Frequency Diversity. Sensors 2020, 20, 1489. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Darabi, H.; Banerjee, P.; Liu, J. Survey of Wireless Indoor Positioning Techniques and Systems. IEEE Trans. Syst. Man, Cybern. Part Appl. Rev. 2007, 37, 1067–1080. [Google Scholar] [CrossRef]
- Liu, J. Hybrid Positioning with Smart Phones. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; Chen, R., Ed.; IGI Global: Hershey, PA, USA, 2012; pp. 159–194. [Google Scholar]
- Stojanović, D.; Stojanović, N. Indoor Localization and Tracking: Methods, Technologies and Research Challenges. Acta Univ. Ser. Autom. Control. Robot. 2014, 13, 57–72. [Google Scholar]
- Retscher, G. Indoor Navigation. In Encyclopedia of Geodesy, Earth Sciences Series; Grafarend, E.W., Ed.; Springer International Publishing: Cham, Switzerland, 2016; Chapter 9-1; 7p, ISBN 978-3-319-02370-0. [Google Scholar] [CrossRef]
- Li, B.; Rizos, C. Editorial: Special Issue International Conference on Indoor Positioning and Navigation 2012, Part 2. J. Locat. Based Serv. 2014, 8, 1–2. [Google Scholar] [CrossRef] [Green Version]
- Li, X.; Wang, J.; Li, T. Seamless Positioning and Navigation by Using Geo-referenced Images and Multi-sensor Data. Sensors 2013, 13, 9047–9069. [Google Scholar] [CrossRef] [Green Version]
- Retscher, G.; Kealy, A.; Gabela, J.; Li, Y.; Goel, S.; Toth, C.K.; Masiero, A.; Błaszczak-Bąk, W.; Gikas, V.; Perakis, H.; et al. A Benchmarking Measurement Campaign in GNSS-denied/challenged Indoor/outdoor and Transitional Environments. J. Appl. Geod. 2020, 14, 215–229. [Google Scholar] [CrossRef]
- Retscher, G.; Zhu, M.; Zhang, K. RFID Positioning. In Ubiquitous Positioning and Mobile Location-Based Services in Smart Phones; Chen, R., Ed.; IGI Global: Hershey, PA, USA, 2012; Chapter 4; pp. 69–95. ISBN 978-1-4666-1827-5. [Google Scholar] [CrossRef]
- Ruotsalainen, L. Vision-Aided Pedestrian Navigation for Challenging GNSS Environments. Ph.D. Thesis, University of Helsinki, Helsinki, Finland, 2013. [Google Scholar]
- EUSPA. GNSS User Technology Report 2018. Available online: https://www.gsa.europa.eu/newsroom/news/gnss-user-technology-report-2018-available-download-now (accessed on 30 June 2022).
- Zhou, B.; Wu, Z.; Chen, Z.; Liu, X.; Li, Q. Wi-Fi RTT/Encoder/INS-based Robot Indoor Localization using Smartphones. IEEE Trans. Veh. Technol. 2023, 1–13. [Google Scholar] [CrossRef]
- Guo, G.; Chen, R.; Ye, F.; Liu, Z.; Xu, S.; Huang, L.; Li, Z.; Qian, L. A Robust Integration Platform of Wi-Fi RTT, RSS Signal, and MEMS-IMU for Locating Commercial Smartphone Indoors. IEEE Internet Things J. 2022, 9, 16322–16331. [Google Scholar] [CrossRef]
- Poulose, A.; Eyobu, O.S.; Han, D.S. An Indoor Position-Estimation Algorithm Using Smartphone IMU Sensor Data. IEEE Access 2019, 7, 11165–11177. [Google Scholar] [CrossRef]
- Wang, N.; Zhang, N.; Wang, M. Wireless Sensors in Agriculture and Food Industry—Recent Development and Future Perspective. Comput. Electron. Agric. 2006, 50, 1–14. [Google Scholar] [CrossRef]
- Retscher, G. Fundamental Concepts and Evolution of Wi-Fi User Localization: An Overview Based on Different Case Studies. Sensors 2020, 20, 5121. [Google Scholar] [CrossRef]
- Chang, N.; Rashidzadeh, R.; Ahmadi, M. Robust Indoor Positioning Using Differential Wi-Fi Acess Points. IEEE Trans. Consum. Electron. 2010, 56, 1860–1867. [Google Scholar] [CrossRef]
- Chen, X.; Kong, J.; Guo, Y.; Chen, X. An Empirical Study of Indoor Localization Algorithms With Densely Deployed APs. In Proceedings of the BGlobal Communications Conference GLOBECOM, Austin, TX, USA, 8–12 December 2014; pp. 517–522. [Google Scholar]
- Banin, L.; Bar-Shalom, O.; Dvorecki, N.; Amizur, Y. High-Accuracy Indoor Geolocation using Collaborative Time of Arrival (CToA). Intel White Paper. 2017. Available online: https://www.researchgate.net/publication/320146822_High-Accuracy_Indoor_Geolocation_using_Collaborative_Time_of_Arrival_CToA (accessed on 23 February 2023).
- Yu, Y.; Chen, R.; Chen, L.; Guo, G.; Ye, F.; Liu, Z. A Robust Dead Reckoning Algorithm Based on Wi-Fi FTM and Multiple Sensors. Remote Sens. 2019, 11, 504. [Google Scholar] [CrossRef] [Green Version]
- Ibrahim, M.; Liu, H.; Jawahar, M.; Nguyen, V.; Gruteser, M.; Howard, R.; Yu, B.; Bai, F. Verification: Accuracy Evaluation of WiFi Fine Time Measurements on an Open Platform. In Proceedings of the 24th Annual International Conference on Mobile Computing and Networking, MobiCom ’18, New Delhi, India, 29 October 2018; Association for Computing Machinery: New York, NY, USA, 2018; pp. 417–427. [Google Scholar] [CrossRef]
- Feng, X.; Nguyen, K.A.; Luo, Z. WiFi Access Points Line-of-Sight Detection for Indoor Positioning Using the Signal Round Trip Time. Remote Sens. 2022, 14, 6052. [Google Scholar] [CrossRef]
- Si, M.; Wang, Y.; Xu, S.; Sun, M.; Cao, H. A Wi-Fi FTM-Based Indoor Positioning Method with LOS/NLOS Identification. Appl. Sci. 2020, 10, 956. [Google Scholar] [CrossRef] [Green Version]
- Cao, H.; Wang, Y.; Bi, J.; Xu, S.; Si, M.; Qi, H. Indoor Positioning Method Using WiFi RTT Based on LOS Identification and Range Calibration. ISPRS Int. J.-Geo-Inf. 2020, 9, 627. [Google Scholar] [CrossRef]
- Han, K.; Yu, S.M.; Kim, S.L.; Ko, S.W. Exploiting User Mobility for WiFi RTT Positioning: A Geometric Approach. IEEE Internet Things J. 2021, 8, 14589–14606. [Google Scholar] [CrossRef]
- Houle, D.E. Analysis of the Position-Dependent Error in FTM RTT Indoor Navigation. Ph.D. Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2021. [Google Scholar]
- Kia, G.; Talvitie, J.; Ruotsalainen, L. RSS-Based Fusion of UWB and WiFi-Based Ranging for Indoor Positioning. In Proceedings of the IPIN 2021 WiP Proceedings, Lloret de Mar, Spain, 29 November–2 December 2021. [Google Scholar]
- Yu, Y.; Chen, R.; Liu, Z.; Guo, G.; Ye, F.; Chen, L. Wi-Fi Fine Time Measurement: Data Analysis and Processing for Indoor Localisation. J. Navig. 2020, 73, 1106–1128. [Google Scholar] [CrossRef]
- Ma, C.; Wu, B.; Poslad, S.; Selviah, D.R. Wi-Fi RTT Ranging Performance Characterization and Positioning System Design. IEEE Trans. Mob. Comput. 2022, 21, 740–756. [Google Scholar] [CrossRef]
- Guo, G.; Chen, R.; Ye, F.; Peng, X.; Liu, Z.; Pan, Y. Indoor Smartphone Localization: A Hybrid WiFi RTT-RSS Ranging Approach. IEEE Access 2019, 7, 176767–176781. [Google Scholar] [CrossRef]
- Tsetsos, V.; Anagnostopoulos, C.; Kikiras, P.; Hadjiefthymiades, S. Semantically enriched navigation for indoor environments. IJWGS Int. J. Web Grid Serv. 2006, 2, 453–478. [Google Scholar] [CrossRef] [Green Version]
- Gikas, V.; Antoniou, C.; Retscher, G.; Panagopoulos, A.; Kealy, A.; Perakis, H.; Mpimis, T. A low-cost wireless sensors positioning solution for indoor parking facilities management. J. Locat. Based Serv. 2016, 10, 241–261. [Google Scholar] [CrossRef]
- Antoniou, C.; Gikas, V.; Papathanasopoulou, V.; Mpimis, T.; Perakis, H.; Kyriazis, C. A framework for risk reduction for indoor parking facilities under constraints using positioning technologies. Int. J. Disaster Risk Reduct. 2018, 31, 1166–1176. [Google Scholar] [CrossRef]
- Perakis, H.; Mpimis, A.; Gikas, V.; Papathanasopoulou, V.; Antoniou, K. Driving Behavior Classification within Indoor Parking Facilities Based on Inertial Smartphone Data. In Proceedings of the 6th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Banff, AB, Canada, 13–16 October 2015. [Google Scholar]
- Czogalla, O.; Naumann, S.; Schade, J.; Schönrock, R. Indoor Positioning and Navigation for Pedestrian Guidance in Public Transport Facilities. In Proceedings of the 22nd ITS World Congress, Bordeaux, France, 5–9 October 2015; Available online: https://www.researchgate.net/publication/283045487_Indoor_Positioning_and_Navigation_for_Pedestrian_Guidance_in_Public_Transport_Facilities (accessed on 23 February 2023).
- El-Sheimy, N.; Li, Y. Indoor navigation: State of the art and future trends. Satell. Navig. 2021, 2, 7. [Google Scholar] [CrossRef]
- Zheng, M.C.; Chen, C.I. Designing indoor navigation interfaces on smartphones compatible with human information processing in an emergency evacuation scenario. J. Asian Archit. Build. Eng. 2019, 18, 599–616. [Google Scholar] [CrossRef]
- Karimi, H.A. Wayfinding and Navigation Services for People with Disabilities. In Encyclopedia of GIS; Shekhar, S., Xiong, H., Zhou, X., Eds.; Springer International Publishing: Cham, Switzerland, 2015; pp. 1–10. [Google Scholar] [CrossRef]
- Zahabi, M.; Zheng, X.; Maredia, A.; Shahini, F. Design of Navigation Applications for People with Disabilities: A Review of Literature and Guideline Formulation. Int. J. Hum.-Comput. Interact. 2022, 1–23. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Campaign | 1D | 2D |
|---|---|---|
| Number of Smartphones used | 1 | 2 |
| Smartphones | Google Pixel 3a XL | Google Pixel 3a XL and Xiaomi Redmi Note 9 Pro |
| Amount ofAccess Points | 3 | 5 |
| Access Points | Compulab Wi-Fi Indoor Location Device (WILD) | Compulab Wi-Fi Indoor Location Device (WILD) |
| Scenario 1 | Scenario 2 | Scenario 3 | |
|---|---|---|---|
| AP Settings | Bandwidth: AP1-80 MHz, AP2-40 MHz, AP3-20 MHz Sampling Rate: 10 Hz | ||
| AP operation | 3 APs simultaneously | 3 APs simultaneously | Each AP separately |
| Experiment Conditions | LOS | NLOS | LOS |
| Number of Reference Ranges | 53 RP (43 CP, 10 VP) | 53 RP (43 CP, 10 VP) | 6 RP |
| Selection of Reference Ranges | 0.5–3.0 m per 0.5 m, 3–50 m per 1 m | 0.5–3.0 m per 0.5 m, 3–50 m per 1 m | 5, 10, 20, 30, 40, 50 m |
| 2D Positioning—Correction (Ranging Measurements) | |
|---|---|
| AP settings | Bandwidth: 80 MHz, Sampling Rate: 10 Hz |
| Number of APs | 5 Access Points |
| CP | 14 Correction Points |
| VP | 4 Validation Points |
| Absolute Difference (m) | |||
|---|---|---|---|
| RD (m) | AP1 (80 MHz) | AP2 (40 MHz) | AP3 (20 MHz) |
| 5 | 0.36 | 0.27 | 1.13 |
| 10 | 3.31 | 0.89 | 0.14 |
| 20 | 0.28 | 1.03 | 0.29 |
| 30 | 0.06 | 0.41 | 0.21 |
| 40 | 0.11 | 0.38 | 2.61 |
| 50 | 0.40 | 0.47 | 3.91 |
| Google Pixel | ||||||||
|---|---|---|---|---|---|---|---|---|
| North | East | South | West | |||||
| (a, b) | SE (m) | (a, b) | SE (m) | (a, b) | SE (m) | (a, b) | SE (m) | |
| AP1 | (, 7.954) | 0.62 | (0.0003, 7.936) | 0.42 | (, 7.657) | 0.90 | (, 6.824) | 1.03 |
| AP2 | (, 6.838) | 0.83 | (, 7.393) | 0.70 | (, 7.461) | 1.00 | (, 6.851) | 1.14 |
| AP3 | (, 7.929) | 0.40 | (, 7.375) | 1.01 | (, 7.851) | 0.54 | (, 6.898) | 0.84 |
| AP4 | (, 7.343) | 1.80 | (, 6.989) | 1.22 | (, 7.404) | 1.29 | (, 7.520) | 0.85 |
| AP5 | (, 8.044) | 2.10 | (, 7.753) | 1.24 | (, 8.000) | 1.40 | (, 7.721) | 1.50 |
| Xiaomi Redmi | ||||||||
|---|---|---|---|---|---|---|---|---|
| North | East | South | West | |||||
| (a, b) | SE (m) | (a, b) | SE (m) | (a, b) | SE (m) | (a, b) | SE (m) | |
| AP1 | () | 0.76 | () | 0.41 | () | 0.58 | () | 2.93 |
| AP2 | () | 0.87 | () | 0.93 | () | 0.96 | () | 1.24 |
| AP3 | () | 0.46 | () | 0.90 | () | 0.39 | () | 0.62 |
| AP4 | () | 1.92 | () | 1.18 | () | 1.57 | () | 1.33 |
| AP5 | () | 1.55 | () | 1.30 | () | 1.04 | () | 1.45 |
| Google Pixel | ||||
|---|---|---|---|---|
| North | East | |||
| (a, b, c) | SE (dBm) | (a, b, c) | SE (dBm) | |
| AP1 | (0.055, ) | 4.4 | (0.030, , ) | 3.5 |
| AP2 | (0.044, ) | 3.2 | (0.026, , ) | 3.8 |
| AP3 | (0.086, ) | 3.9 | (0.055, , ) | 4.6 |
| AP4 | () | 6.1 | (0.023, , ) | 4.5 |
| AP5 | () | 4.4 | (, ) | 3.1 |
| South | West | |||
| (a, b, c) | SE (dBm) | (a, b, c) | SE (dBm) | |
| AP1 | (0.049, ) | 2.2 | (0.018, ) | 3.9 |
| AP2 | (0.023, ) | 3.5 | (0.019, ) | 3.6 |
| AP3 | (0.026, ) | 4.7 | (0.067, ) | 3.2 |
| AP4 | () | 5.7 | () | 3.8 |
| AP5 | () | 5.6 | () | 4.9 |
| Xiaomi Redmi | ||||
|---|---|---|---|---|
| North | East | |||
| (a, b, c) | SE (dBm) | (a, b, c) | SE (dBm) | |
| AP1 | (, 0.76) | 3.3 | (, 0.41) | 4.4 |
| AP2 | (, 0.87) | 3.6 | (, 0.93) | 3.8 |
| AP3 | (, 0.46) | 4.6 | (, 0.90) | 5.2 |
| AP4 | (, 1.92) | 5.5 | (, 1.18) | 4.3 |
| AP5 | (, 1.55) | 3.6 | (, 1.30) | 2.8 |
| South | West | |||
| (a, b, c) | SE (dBm) | (a, b, c) | SE (dBm) | |
| AP1 | (, 0.58) | 2.7 | (, 2.93) | 3.3 |
| AP2 | (, 0.96) | 2.4 | (, 1.24) | 3.8 |
| AP3 | (, 0.39) | 3.6 | (, 0.62) | 6.7 |
| AP4 | (, 1.57) | 3.2 | (, , 1.33) | 3.3 |
| AP5 | (, 1.04) | 5.9 | (, 1.45) | 4.3 |
| Google Pixel | ||||||||
|---|---|---|---|---|---|---|---|---|
| N | E | S | W | N | E | S | W | |
| % of Correct Model Selection | RMSE (m) (STD (m)) | |||||||
| VP1 | ||||||||
| AP1 | 0.8 | 72.4 | 0.0 | 80.2 | 1.12 (1.03) | 1.45 (0.79) | 0.86 (0.86) | 0.76 (0.75) |
| AP2 | 16.9 | 98.4 | 9.8 | 0.8 | 0.32 (0.31) | 0.59 (0.52) | 0.48 (0.47) | 3.01 (0.89) |
| AP3 | 0.0 | 0.0 | 8.2 | 0.0 | 0.46 (0.28) | 0.94 (0.51) | 0.47 (0.47) | 0.71 (0.32) |
| AP4 | 0.0 | 4.1 | 0.0 | 72.7 | 2.42 (1.55) | 2.92 (0.65) | 2.32 (0.83) | 1.99 (1.13) |
| AP5 | 24.2 | 6.5 | 44.3 | 0.0 | 2.92 (0.76) | 3.16 (1.34) | 0.99 (0.86) | 1.10 (0.41) |
| VP2 | ||||||||
| AP1 | 5.6 | 78.4 | 100.0 | 22.9 | 0.67 (0.25) | 0.48 (0.38) | 0.66 (0.23) | 1.19 (0.74) |
| AP2 | 86.3 | 0.9 | 0.0 | 1.0 | 0.36 (0.27) | 0.41 (0.19) | 0.46 (0.30) | 0.67 (0.67) |
| AP3 | 1.6 | 3.4 | 0.7 | 45.7 | 0.67 (0.47) | 0.31 (0.19) | 0.54 (0.22) | 0.48 (0.42) |
| AP4 | 100.0 | 12.1 | 0.0 | 9.5 | 1.42 (0.28) | 1.70 (0.81) | 1.38 (0.16) | 1.46 (0.27) |
| AP5 | 14.5 | 20.7 | 0.0 | 60.0 | 0.38 (0.32) | 0.30 (0.29) | 1.01 (0.22) | 0.87 (0.78) |
| VP3 | ||||||||
| AP1 | 0.0 | 0.0 | 5.8 | 100.0 | 0.72 (0.34) | 1.67 (0.68) | 1.35 (0.86) | 1.37 (0.55) |
| AP2 | 5.2 | 0.0 | 2.4 | 29.9 | 2.70 (1.38) | 0.78 (0.74) | 1.51 (0.64) | 2.30 (1.06) |
| AP3 | 28.1 | 0.0 | 0.0 | 29.9 | 0.71 (0.28) | 0.30 (0.26) | 0.42 (0.29) | 1.35 (0.78) |
| AP4 | 97.8 | 91.3 | 18.3 | 6.8 | 0.79 (0.20) | 1.65 (0.22) | 1.29 (0.30) | 0.83 (0.30) |
| AP5 | 18.5 | 5.2 | 0.0 | 0.0 | 0.82 (0.37) | 0.50 (0.38) | 0.72 (0.22) | 0.51 (0.51) |
| VP4 | ||||||||
| AP1 | 0.0 | 0.0 | 7.3 | 100.0 | 0.74 (0.36) | 3.51 (0.46) | 0.55 (0.52) | 1.19 (0.54) |
| AP2 | 10.7 | 91.2 | 20.3 | 0.0 | 1.10 (0.78) | 0.62 (0.30) | 1.26 (1.05) | 0.81 (0.36) |
| AP3 | 0.0 | 0.0 | 8.9 | 100.0 | 1.37 (0.36) | 0.70 (0.37) | 0.90 (0.84) | 0.64 (0.52) |
| AP4 | 6.6 | 64.0 | 0.0 | 0.0 | 0.70 (0.24) | 0.44 (0.19) | 0.48 (0.41) | 0.82 (0.39) |
| AP5 | 93.4 | 0.0 | 0.0 | 24.8 | 0.74 (0.36) | 1.17 (0.45) | 0.79 (0.65) | 0.68 (0.24) |
| Xiaomi Redmi | ||||||||
|---|---|---|---|---|---|---|---|---|
| N | E | S | W | N | E | S | W | |
| % of Correct Model Selection | RMSE (m) (STD (m)) | |||||||
| VP1 | ||||||||
| AP1 | 30.0 | 0.0 | 3.3 | 21.9 | 1.07 (0.43) | 0.59 (0.24) | 0.61 (0.27) | 0.75 (0.41) |
| AP2 | 100.0 | 0.0 | 0.0 | 0.0 | 0.96 (0.24) | 0.66 (0.39) | 0.32 (0.32) | 4.85 (0.63) |
| AP3 | 91.7 | 0.0 | 42.1 | 4.4 | 0.32 (0.31) | 0.37 (0.26) | 1.14 (0.55) | 0.34 (0.24) |
| AP4 | 100.0 | 0.0 | 0.0 | 0.0 | 0.96 (0.96) | 0.61 (0.25) | 0.52 (0.52) | 0.99 (0.53) |
| AP5 | 100.0 | 0.0 | 0.0 | 0.0 | 1.48 (0.84) | 5.12 (2.69) | 1.64 (0.44) | 0.54 (0.38) |
| VP2 | ||||||||
| AP1 | 0.0 | 0.0 | 4.8 | 15.2 | 0.81 (0.26) | 0.87 (0.67) | 0.39 (0.28) | 1.61 (0.45) |
| AP2 | 100.0 | 0.0 | 0.0 | 0.0 | 0.38 (0.35) | 0.63 (0.22) | 0.79 (0.34) | 0.40 (0.40) |
| AP3 | 5.0 | 0.0 | 98.4 | 0.0 | 0.61 (0.47) | 0.27 (0.25) | 0.34 (0.19) | 0.40 (0.40) |
| AP4 | NaN | 0.0 | 0.0 | 0.0 | NaN | 1.75 (1.37) | 1.53 (0.26) | 1.97 (0.23) |
| AP5 | 100.0 | 0.0 | 0.0 | 0.0 | 1.11 (0.36) | 0.78 (0.77) | 0.76 (0.26) | 1.61 (0.27) |
| VP3 | ||||||||
| AP1 | NaN | 22.7 | 0.8 | 75.4 | NaN | 1.55 (1.44) | 1.43 (0.41) | 2.52 (2.45) |
| AP2 | 5.1 | NaN | 0.0 | 0.0 | 1.06 (0.54) | NaN | 1.22 (0.98) | 2.24 (0.75) |
| AP3 | 100.0 | 0.0 | 0.0 | 0.0 | 0.59 (0.21) | 0.48 (0.41) | 0.89 (0.51) | 0.72 (0.39) |
| AP4 | 100.0 | 0.0 | 0.0 | 0.0 | 1.50 (0.44) | 0.97 (0.45) | 0.90 (0.14) | 1.10 (0.11) |
| AP5 | 100.0 | 0.0 | 0.0 | 0.0 | 1.04 (1.04) | 0.29 (0.22) | 0.63 (0.20) | 0.99 (0.97) |
| VP4 | ||||||||
| AP1 | NaN | 20.0 | 0.0 | 76.8 | NaN | 0.90 (0.37) | 0.81 (0.47) | 4.54 (4.02) |
| AP2 | 29.7 | 0.0 | 0.0 | 0.0 | 0.85 (0.64) | 1.83 (0.37) | 0.56 (0.52) | 1.49 (0.57) |
| AP3 | 86.7 | 0.0 | 0.0 | 92.9 | 0.73 (0.58) | 1.03 (0.95) | 0.76 (0.57) | 0.88 (0.47) |
| AP4 | 100.0 | 0.0 | 0.0 | 0.0 | 0.20 (0.20) | 0.35 (0.23) | 0.59 (0.43) | 0.90 (0.50) |
| AP5 | 100.0 | 0.0 | 0.0 | 37.4 | 0.77 (0.22) | 0.91 (0.23) | 0.93 (0.21) | 0.85 (0.33) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Orfanos, M.; Perakis, H.; Gikas, V.; Retscher, G.; Mpimis, T.; Spyropoulou, I.; Papathanasopoulou, V. Testing and Evaluation of Wi-Fi RTT Ranging Technology for Personal Mobility Applications. Sensors 2023, 23, 2829. https://doi.org/10.3390/s23052829
Orfanos M, Perakis H, Gikas V, Retscher G, Mpimis T, Spyropoulou I, Papathanasopoulou V. Testing and Evaluation of Wi-Fi RTT Ranging Technology for Personal Mobility Applications. Sensors. 2023; 23(5):2829. https://doi.org/10.3390/s23052829
Chicago/Turabian StyleOrfanos, Manos, Harris Perakis, Vassilis Gikas, Günther Retscher, Thanassis Mpimis, Ioanna Spyropoulou, and Vasileia Papathanasopoulou. 2023. "Testing and Evaluation of Wi-Fi RTT Ranging Technology for Personal Mobility Applications" Sensors 23, no. 5: 2829. https://doi.org/10.3390/s23052829
APA StyleOrfanos, M., Perakis, H., Gikas, V., Retscher, G., Mpimis, T., Spyropoulou, I., & Papathanasopoulou, V. (2023). Testing and Evaluation of Wi-Fi RTT Ranging Technology for Personal Mobility Applications. Sensors, 23(5), 2829. https://doi.org/10.3390/s23052829